Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Travaux académiques mutualisées 2009-2010 TECHNOLOGIE Les TICE pour développer les compétences scientifiques des élèves Présenté par Jacqueline BONNARD

2
Le projet déposé en juin 2009 vise à mettre en synergie un groupe de 5 professeurs volontaires autour de la problématique citée, en respectant le cahier des charges suivant : Référence au programme avec identification des connaissances et des capacités mises en œuvre, en articulation avec le socle commun. Production des documents décrivant le déroulement de la séance et les intentions pédagogiques. Mutualisation des documents et échanges de pratiques via la visioconférence. 1 - Le projet

3
2.4 Programmation à distance d’un automate du lycée (portail automatisé). A partir d’un cdc simplifié donné par le lycée, les élèves programment l’automate et font une simulation au collège. Lors de la visioconférence ils testent à distance leur programme. Pour cette programmation à distance plusieurs solutions sont envisagées : utilisation d’ENT, pilotage par teamviewer, module GSM. 2 – Les axes du projet 2.1 Proposer une maquette évolutive permettant à tous les professeurs de l’utiliser facilement. A partir des éléments mécaniques communs, il sera proposé plusieurs possibilités avec adaptation de la motorisation du portail à chaque système présent sur l’académie : fischer, lego ou picaxe. 2.2 Des scénarios conçus à partir d’une vidéo d’un portail en fonctionnement permettront d’aborder les fonctions « ET », « OU ». Pour coller à la réalité, il a été décidé d’ajouter une lampe au système. Plusieurs contacts sont à intégrer : contact sec / contact clé / ILS 2.3 La plus value des TICE Les logiciels de programmation utilisés : LLWIN, ROBOPRO, Programeditor, Zelio CFAO (Solidworks, Galaad…) : conception et fabrication de la barrière à partir de contraintes liées au fonctionnement et des pièces supportant le moteur et les capteurs.
 : conception et fabrication de la barrière à partir de contraintes liées au fonctionnement et des pièces supportant le moteur et les capteurs..")
4
Les actions de formation Les formations pour les professeurs Formation « Nouveaux programmes » Pour les collègues n’ayant pas suivi la formation en n-1 216 X 2j Dont 3h sur la thématique « confort et domotique », si possible dans un lycée du secteur. Les CRT 10 après-midi 5 après-midi avec thèmes imposés par l’inspection 3 après-midi avec thèmes choisis en accord avec les collègues inscrits Formation en ligne 50 stagiaires ( dont une partie sur demande de l’inspection ). Présentation, inscription : Une partie en visioconférence Une partie en présentiel Parcours sur 6 semaines Bilan en présentiel Un support commun aux 3 formations : portail automatisé (Eric RAVAUD) - Support possible sur les formations « nouveaux programmes » axés cette année programmes de quatrième, -Assemblage de la partie mécanique du portail avec suivi par visio conférence (en 2 fois 4 CRT), -Support réalisation collective pour la formation en ligne, -Support mis en ligne sur le site académique. +AAM
. Présentation, inscription : Une partie en visioconférence Une partie en présentiel Parcours sur 6 semaines Bilan en présentiel Un support commun aux 3 formations : portail automatisé (Eric RAVAUD) - Support possible sur les formations « nouveaux programmes » axés cette année programmes de quatrième, -Assemblage de la partie mécanique du portail avec suivi par visio conférence (en 2 fois 4 CRT), -Support réalisation collective pour la formation en ligne, -Support mis en ligne sur le site académique. +AAM.")
6
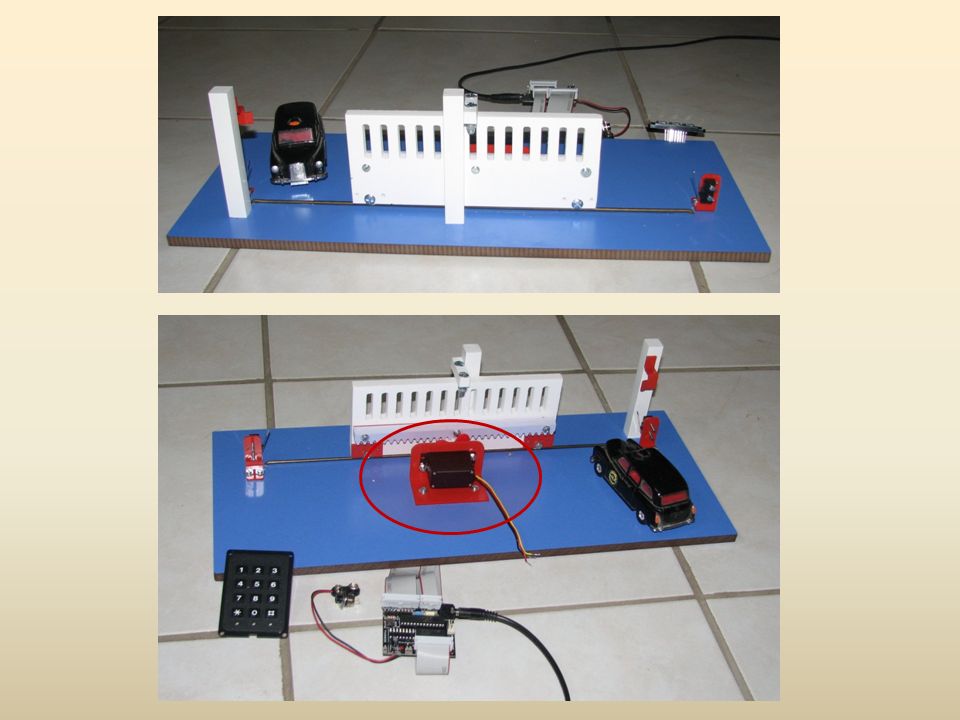
poteaux sol rail Support gyrophare Support microrupteur Support servomoteur Axe 2.1 : Permettre de s’affranchir du servomoteur et proposer aux collègues la possibilité d’utiliser la maquette avec un motoréducteur programmable portail

7
Circuit inverseur pour moteurs à courant continu Objectif : Réaliser un circuit permettant de commander des moteurs à courant continu présents sur des maquettes de systèmes (porte automatique, portail, porte de garage, volet roulant…) dans les deux sens de rotation, et commandés par des interfaces de types Picaxe, Fischertechnik.... Matériel testé à ce jour : La carte réalisée est utilisable avec : - les circuits Picaxe 18x et 28x - les interfaces Fischertechnik.

8
Ou positionner la carte dans le système ? Elle s’intègre dans la chaine d’énergie et réalise les fonctions Alimenter et Distribuer OU Ordres Vers la fonction CONVERTIR

9
Le circuit AlimenterDistribuer Ordres Possibilité d’alimenter le moteur en 9V ou en 5V à l’aide de l’inverseur. L’inversion de sens de rotation se fait par l’envoi d’un ordre de commande sur les bornes S1 ou S2. Vers la fonction CONVERTIR

10
La carte S1 Energie d’entrée (9V) Vers alimentation de l’étage de puissance du PIC ou alimentation de l’interface Fischertechnik Inverseur 5V / 9V pour alimentation du moteur. S2 Vers la fonction CONVERTIR (Moteur)
.")
11
Le dossier technique comprend : - Une nomenclature de toutes les pièces utilesUne nomenclature - Les fichiers des différentes pièces créées avec solidworksLes fichiers des différentes pièces - Les eDrawingseDrawings - Les fichiers d’usinage (avec EFICN)fichiers d’usinage -La procédure pour asservir le servomoteurprocédure Le dossier pédagogique comprend : -Le centre d’intérêt et le descriptif de la séquencecentre d’intérêt et le descriptif - La prise en main de roboproprise en main de robopro - La prise en main de zéliosoft 2
fichiers d’usinage -La procédure pour asservir le servomoteurprocédure Le dossier pédagogique comprend : -Le centre d’intérêt et le descriptif de la séquencecentre d’intérêt et le descriptif - La prise en main de roboproprise en main de robopro - La prise en main de zéliosoft 2")
12
Où en est-on en mai ? Axe 2.1 et 2.3 : achevés Axe 2.2 : scénarios pour pilotage du portail avec illustration vidéo : en cours de réalisation Axe 2.4 : pilotage à distance de la maquette du lycée Travail de collègues de collège sur zéliosoft2 au lycée effectué L’expérimentation du pilotage à distance du portail du lycée par une classe se fera en juin

Présentations similaires


 Présentation du programme Grenoble – 29 avril 2015 Baccalauréat technologique - série STHR Baccalauréat technologique.>")
>")














 nQUOI ? conception et mise en œuvre d’un.>")
