Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Université SAAD DAHLAB de BLIDA Institut d’Electronique
Thème: CONCEPTION ET REALISATION D’UN BRAS MANIPULATEUR Responsable de Recherche : Mr. N. AMMOUR Mr. Z. BENSLAMA Projet présenté par : Mr. R. LAZALI Mr. A. RAHICHE

2
Plan de l’exposé - Introduction générale
- Présentation du bras manipulateur - Présentation du système électronique de sa commande - Présentation du système de communication homme - machine Conclusion et perspectives

3
Introduction générale
Définition Historique Cahier des charges

4
Structure mécanique du bras
Bâti rotoïde Base 1 Pince Avant bras Epaule 2 Bras Coude 3 Poignet

5
Forme et vue transversale d’un segment du bras
h e Avec : e = 2mm. h = 35mm pour le segment du bras et 30mm pour le segment du l’avant bras. L = 210mm pour le segment du bras et 180cm pour le segment du l’avant bras.

6
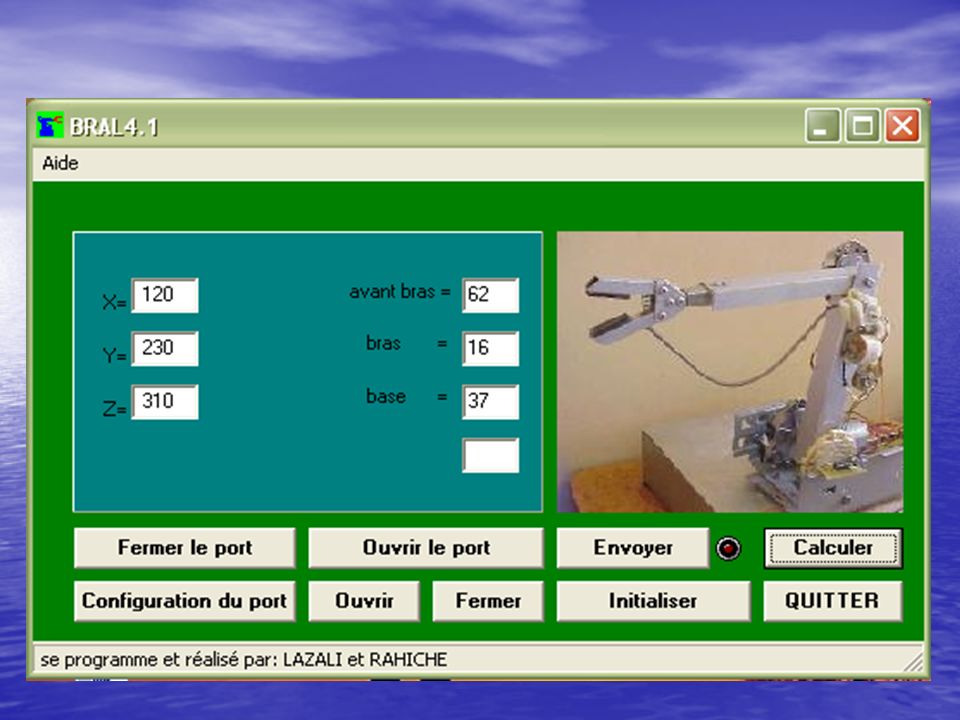
Dimensions du bras avec sa vue de dessus du bras BRAL4.1
21cm 18cm 10cm 12cm 24cm 32cm

7
Pince Réducteur 3 Moteur 3 Réducteur 2 Moteur 2 Moteur 1 Réducteur 1 Disposition des moteurs par rapport à l’architecture mécanique du bras manipulateur

8
Organe de capture de la position angulaire
Signal de sortie Cellule photoélectrique Axe de rotation du moteur Encodeur différentiel

9
Encodeur différentiel. (Coupe transversale) Cellule photoélectrique
Photodiode réceptrice Disque Axe de moteur Diode infra rouge émettrice Ouverture Cellule photoélectrique

10
Etage d’acquisition de position
Partie électronique Etage de commande (Carte à µC) Etage de puissance PC Actionneurs Etage d’acquisition de position Schéma synoptique du système de commande du bras
 Etage de. puissance. PC. Actionneurs. Etage d’acquisition de position. Schéma synoptique du système de commande du bras.")
11
Etage de commande

12
Etage de puissance pour la commande des moteurs

13
schéma développé de la carte d’acquisition
DIR PHD R2 C R3 Vers l’entrée de capture du µC ( PORTA ) Axe de moteur Encodeur
 Axe de moteur. Encodeur.")
14
PARTIE ‘’SOFT’’

15
Principal gérant la commande du bras
Capture de La base Capture de bras Début Configuration des registres du µC nécessaires Réception de la position consigne Activation des moteurs concernés génération des signaux PWM Capture de position non oui Mise à jour de signal de commande de l’actionneur concerné Capture de L’avant bras L’arrêt de l’actionneur Tous les actionneurs sont arrités Position atteinte Organigramme du programme Principal gérant la commande du bras

17
Conclusion Et Perspectives

Présentations similaires















, un ROBOT est un Appareil qui agit de façon automatique pour une fonction donnée.>")


>")
