Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

2
Modifications des blocs fonctionnels du Servo 9300 V2.0
AIN1 AIN1_bError_b = TRUE, si courant pilote <2mA AIN1_bError_b = FALSE, si courant pilote ³2mA On peut régler par le code C598, si le dysfonctionnement provoque un défaut (Trip/Warning/Off).
.")
3
Modifications des blocs fonctionnels du Servo 9300 V2.0
CAN_ResetNode Un ResetNode peut également être activé dans le programme API.

4
Modifications des blocs fonctionnels du Servo 9300 V2.0
FCODE FCODE’s stehen weiterhin zum abgleichen als Systembaustein zur Verfügung

5
Modifications des blocs fonctionnels du Servo 9300 V2.0
FB’s sans _a / _v Ces FB ne comportent pas de mise à l’échelle de signaux analogiques ou de vitesse. Seules des valeurs entières (16 bits) sont lues.
 sont lues.")
6
Modifications des blocs fonctionnels du Servo 9300 V2.0
L_MLP Si le défaut « incident phase moteur » doit être utilisé dans le programme API, le bloc L_MLP doit alors être inséré dans la bibliothèque du programme.

7
Modifications des blocs fonctionnels du Servo 9300 V2.0
FB avec variables Retain Pour conserver une valeur après coupure réseau, une variable VAR_GLOBAL_RETAIN doit être utilisée dans ces FB et être reliée de la sorte aux FB.

8
Modifications des blocs fonctionnels du Servo 9300 V2.0
DCTRL

9
Modifications des blocs fonctionnels du Servo 9300 V2.0
DCTRL_ALT

10
Modifications des blocs fonctionnels du Servo 9300 V2.0
AIF_IO_AutomationInterface ALT NEU

11
ALT NEU

12
Modifications des blocs fonctionnels du Servo 9300 V2.0
AIF_IO_AutomationInterface Si une communication doit intervenir entre AIF1 et DCTRL, les liaisons suivantes doivent être programmée sous DDS.

13
Modifications des blocs fonctionnels du Servo 9300 V2.0
CAN1_IO NEU ALT

14
ALT NEU

15
Modifications des blocs fonctionnels du Servo 9300 V2.0
CAN1_IO Si une communication doit intervenir entre CAN1 et DCTRL, les liaisons suivantes doivent être programmée sous DDS.

16
Modifications des blocs fonctionnels du Servo 9300 V2.0
CAN2_OUT NEU ALT

17
Modifications des blocs fonctionnels du Servo 9300 V2.0
CAN3_OUT NEU ALT

18
Modifications des blocs fonctionnels du Servo 9300 V2.0
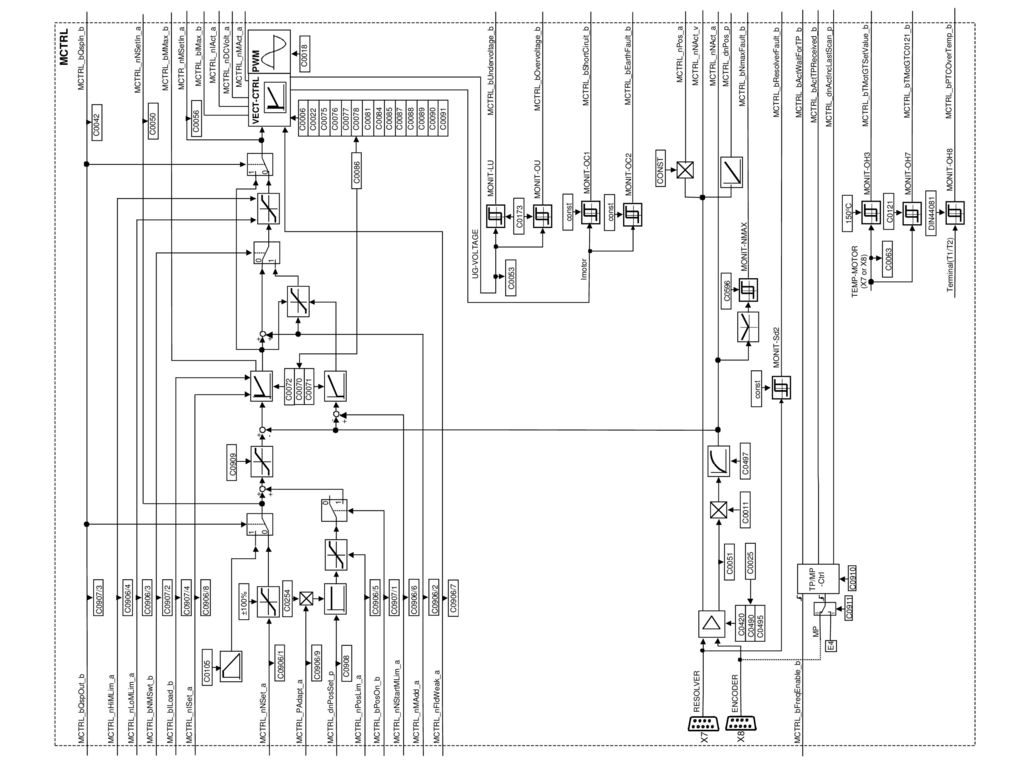
MCTRL Voir pages suivantes

20
Modifications des blocs fonctionnels du Servo 9300 V2.0
MCTRL_ancien

21
Modifications des blocs fonctionnels du Servo 9300 V2.0
MCTRL Si DCTRL doit déclencher un arrêt rapide (QSP), le bloc MCTRL doit être connecté comme suit :
, le bloc MCTRL doit être connecté comme suit :")
22
Modifications des blocs fonctionnels du Servo 9300 V2.0
DFIN_IO NEU ALT

23
Modifications des blocs fonctionnels du Servo 9300 V2.0
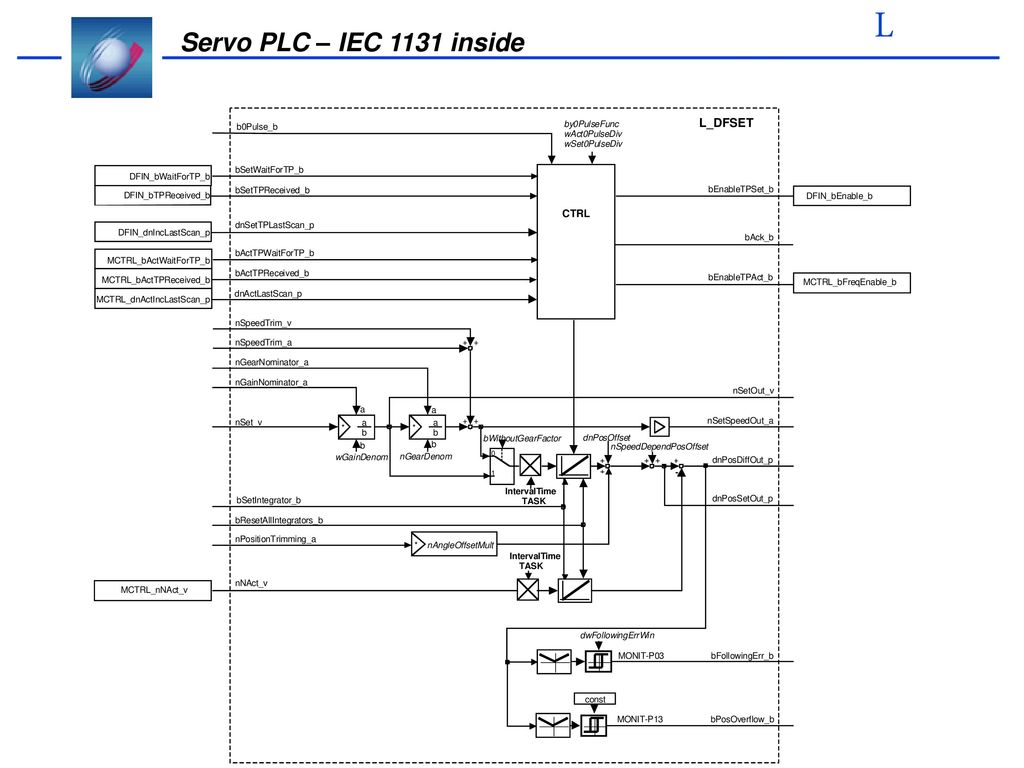
L_DFSET NEU ALT

25
Modifications des blocs fonctionnels du Servo 9300 V2.0

26
Modifications des blocs fonctionnels du Servo 9300 V2.0
L_DFRFG NEU ALT

27
Modifications des blocs fonctionnels du Servo 9300 V2.0
L_DFRFG Pour que L_DFRFG fonctionne précisément en position, la programmation doit être ainsi !!

28
Modifications des blocs fonctionnels du Servo 9300 V2.0
L_REF NEU ALT

29
Modifications des blocs fonctionnels du Servo 9300 V2.0
L_REF La tâche, dans laquelle L_REF est utilisé ne doit jamais excéder 10 ms !!

30
Modifications des blocs fonctionnels du Servo 9300 V2.0
DFOUT_IO C0540=0 -> DFOUT_nOut est mis à l’échelle comme un signal analogique ! C0540=1 -> DFOUT_nOut est mis à l’échelle comme un signal vitesse! C0540=3 -> Fonction disparue !

31
Nouveautés du Drive PLC Developer Studio

32
Nouveautés du Drive PLC Developer Studio
Configuration des tâches Temps de surveillance: Tâche Intervalle <90% (min 1ms) Évènement/Interruption £ 100ms
 Évènement/Interruption £ 100ms.")
33
Nouveautés du Drive PLC Developer Studio
Configuration des tâches: ‘Extras’ ‘Gestion des tâches’ Temps de surveillance: £ 10s

34
Nouveautés du Drive PLC Developer Studio
Moniteur de tâches

35
Nouveautés du Drive PLC Developer Studio
Valeur initiales des codes

36
Nouveautés du Drive PLC Developer Studio
Image process L’image process renvoie l’état des E/S des éléments du système. Tâche cyclique une seule tâche cyclique, l’image process complète est lue au début de la tâche et écrite à la fin. Tâche intervalle (INTERVAL) Si vous utilisez des tâches intervalle, les E/S des éléments du système (image process de la tâche cyclique) utilisées dans la tâche intervalle sont stockées dans la tâche intervalle. L’image process est toujours établie dans la tâche la plus rapide.
 Si vous utilisez des tâches intervalle, les E/S des éléments du système (image process de la tâche cyclique) utilisées dans la tâche intervalle sont stockées dans la tâche intervalle. L’image process est toujours établie dans la tâche la plus rapide.")
37
Nouveautés du Drive PLC Developer Studio
Moniteur image process

38
Nouveautés du Drive PLC Developer Studio
Débogage/ Points d’arrêt Lorsque le 9300 Servo API reconnaît un point d’arrêt posé par l’utilisateur, il se passent les choses suivantes : Blocage variateur ‘RSP’ Les programmes des tâches Intervalle / Évènement / Interruption sont rangés avant la tâche cyclique (PLC-PRG) et sont traités de manière cyclique. Les programmes des tâches Intervalle ne sont plus traités avec une durée équidistante. Les programmes des tâches Evènement sont seulement traités cycliquement, si avant le dernier cycle la variable logique d ’interrogation était à 0.
 et sont traités de manière cyclique. Les programmes des tâches Intervalle ne sont plus traités avec une durée équidistante. Les programmes des tâches Evènement sont seulement traités cycliquement, si avant le dernier cycle la variable logique d ’interrogation était à 0.")
39
Nouveautés du Drive PLC Developer Studio
Débogage/ Point d’arrêts Si le programme est arrêté par un point d’arrêt, les horloges (Timer) utilisées sont gelées. Le temps continue seulement de s’écouler lorsqu’on a quitté le point d’arrêt. Lorsque tous les points d’arrêt sont supprimés, le programme API se déroule à nouveau normalement. Toutes les variables qui ont été modifiées pendant le débogage sont prises en compte. Le déblocage du variateur est autorisé.
 utilisées sont gelées. Le temps continue seulement de s’écouler lorsqu’on a quitté le point d’arrêt. Lorsque tous les points d’arrêt sont supprimés, le programme API se déroule à nouveau normalement. Toutes les variables qui ont été modifiées pendant le débogage sont prises en compte. Le déblocage du variateur est autorisé.")
40
Nouveautés du Drive PLC Developer Studio
Configuration de l’automate

41
Nouveautés du Drive PLC Developer Studio
Paramètres de communication

42
Nouveautés du Drive PLC Developer Studio
Exemple de programme: CFG1010CFC.pro

Présentations similaires


 C.R.I.P.T Informatique (BOYER Jérôme)>")





. AS-Interface a été.>")







>")


