Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Robot Fourmis ABAD Zoïlo CROSA Jason KOME HU KAM-THU THON Yannick
VERCHERE Lucile

2
Sommaire La marche Hexapode Fonctionnement des Servomoteurs
Introduction La marche Hexapode Fonctionnement des Servomoteurs Étude des dimensions Conception Électronique La télécommande Programmation Test Évolutions futures/possibles Conclusion

3
Introduction Au début nous voulions améliorer le robot créé l’année dernière lors des TPE. Nous voulions le transformer en robot suiveur de ligne en y rajoutant une caméra et des capteurs. Cependant, ces améliorations étaient impossible compte tenu de la fragilité du robot.

4
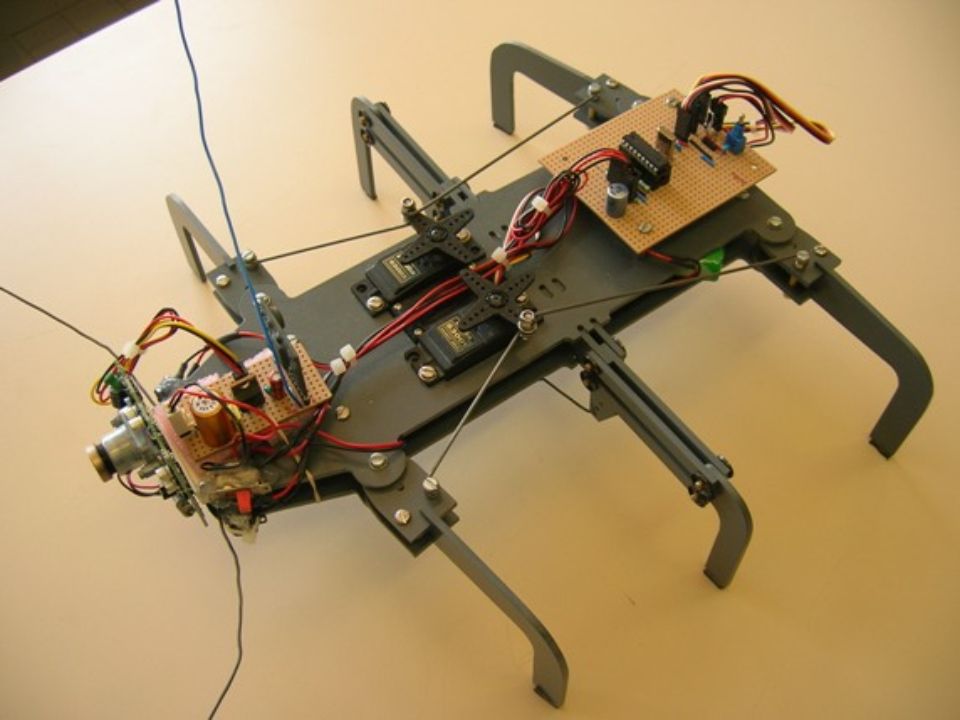
Nous avons donc changé d’objectif, et nous avons décidé de construire un nouveau robot. Ce dernier devrait être plus stable et plus solide que l’ancien. La solution trouvée fut l’hexapode, un robot avec six pattes comme les fourmis ou les scarabées. Bien que le nombre de servomoteurs était un problème au départ nous avons étudié les différents modèles possibles et nous avons opté pour une solution avec trois servomoteurs (un pour deux pattes).
..")
9
La Marche Hexapode Pour un robot hexapode, la marche la plus courante est le tripode alterné. Il va se déplacer en soulevant 3 pattes à la fois, c’est à dire les deux extrêmes d'un côté et la patte centrale du côté opposé. Puis il recommence en alternant les 3 pattes, et ainsi de suite.... Sur les figures, les couleurs pleines représentent les pattes au sol et les couleurs hachurées symbolisent les pattes en l'air.

10
Fonctionnement des Servomoteurs
Le Servomoteur est un moteur utilisé dans le modélisme, il est commandé par impulsions et sa position est vérifié par un potentiomètre, il est en outre constitué de plusieurs roues dentées (4 ensembles de 2 roues dentées, une grande et une petite) qui a pour fonction de réduire la vitesse en augmentant le couple. Le servomoteur au complet, une fois assemblé
 qui a pour fonction de réduire la vitesse en augmentant le couple. Le servomoteur au complet, une fois assemblé.")
11
La roue du moteur entraîne la roue rouge qui entraîne la roue bleue qui entraîne la roue verte et enfin la roue orange qui est fixé au palant.

12
Le PWM La méthode du PWM (Pulse Width Modulation, en français modulation en largeur d'impulsion ) consiste a envoyer très rapidement des impulsions aux moteurs. Ces impulsions sont d'amplitude égale (0 ou 5V), mais de temps haut variables. Normalement le moteur fait la moyenne des temps haut et des temps bas ce qui lui donne une tension moyenne. L’intérêt d’un tel procédé est de ne pas réduire la tension et donc de consommer moins mais de garder une tension fixe et seulement varier la fréquence en changeant le rapport temps haut/temps bas.
 consiste a envoyer très rapidement des impulsions aux moteurs. Ces impulsions sont d amplitude égale (0 ou 5V), mais de temps haut variables. Normalement le moteur fait la moyenne des temps haut et des temps bas ce qui lui donne une tension moyenne. L’intérêt d’un tel procédé est de ne pas réduire la tension et donc de consommer moins mais de garder une tension fixe et seulement varier la fréquence en changeant le rapport temps haut/temps bas.")
13
Les servomoteurs fonctionnent différemment tout en gardant le principe du PWM. La période est constante, c'est la largeur d'impulsion qui détermine la position de l'axe. La position milieu correspond à une largeur d'environ 1,5 ms. Selon l'angle de rotation souhaité, les impulsions seront plus brèves ou plus longues. Mais la période de 20 ms reste tout le temps la même. L’électronique intégré dans le servomoteurs reçoit l'ordre et fait tourner le moteur dans le sens demandé jusqu'à ce que le potentiomètre indique qu’il est arrivé à la bonne position.

14
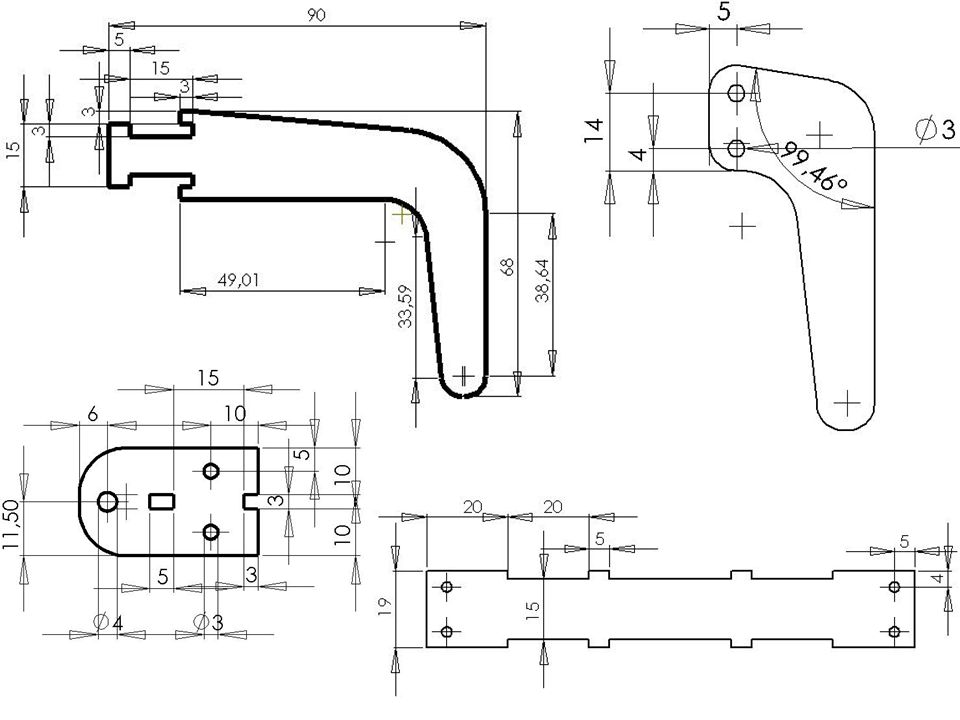
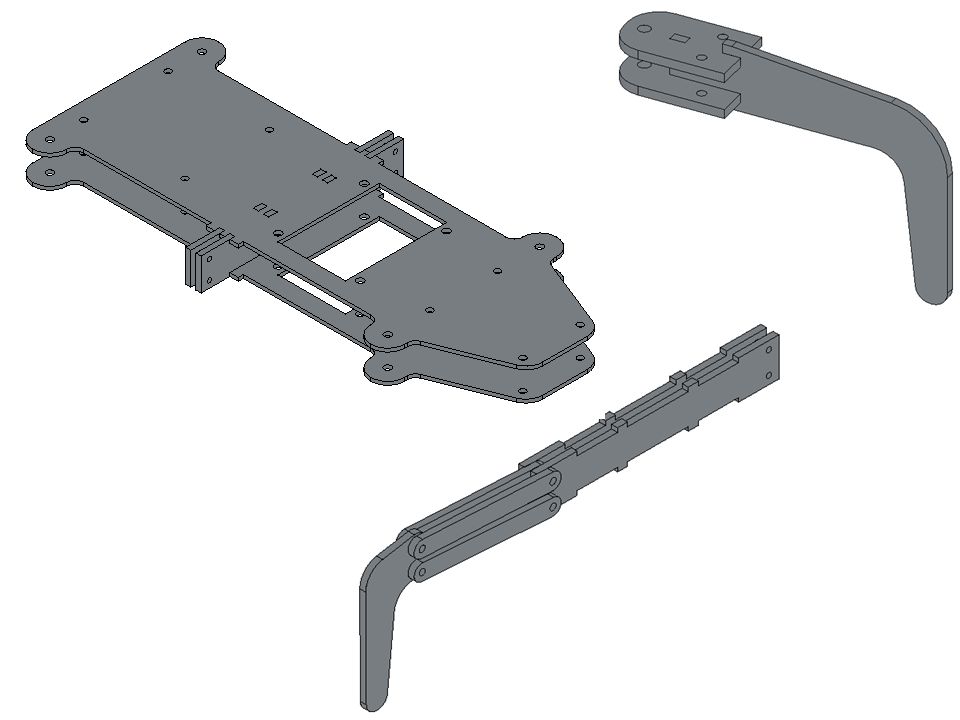
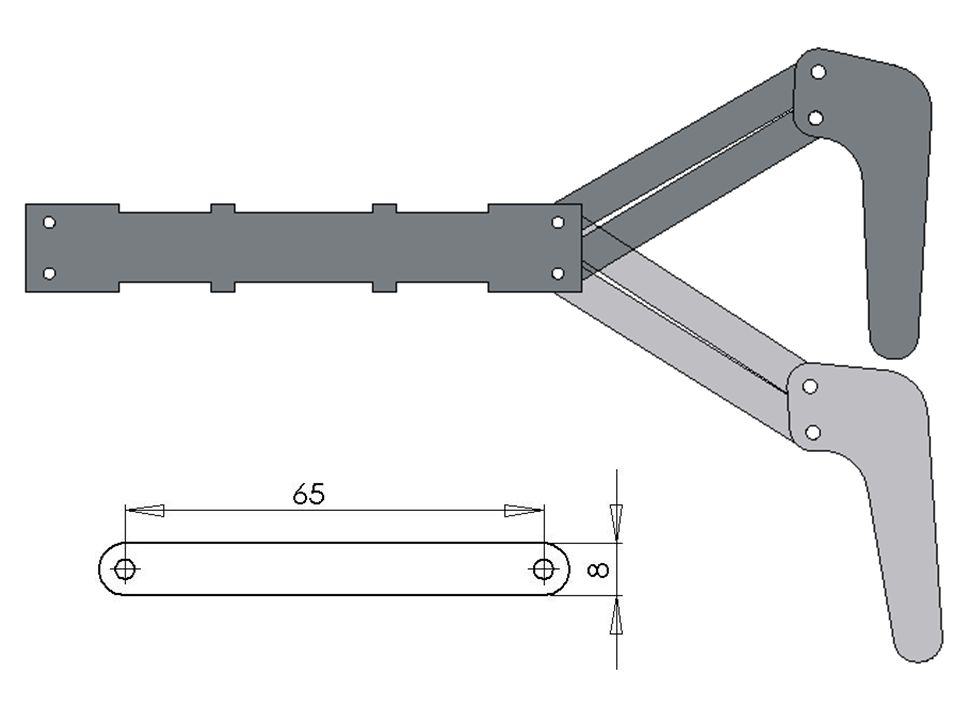
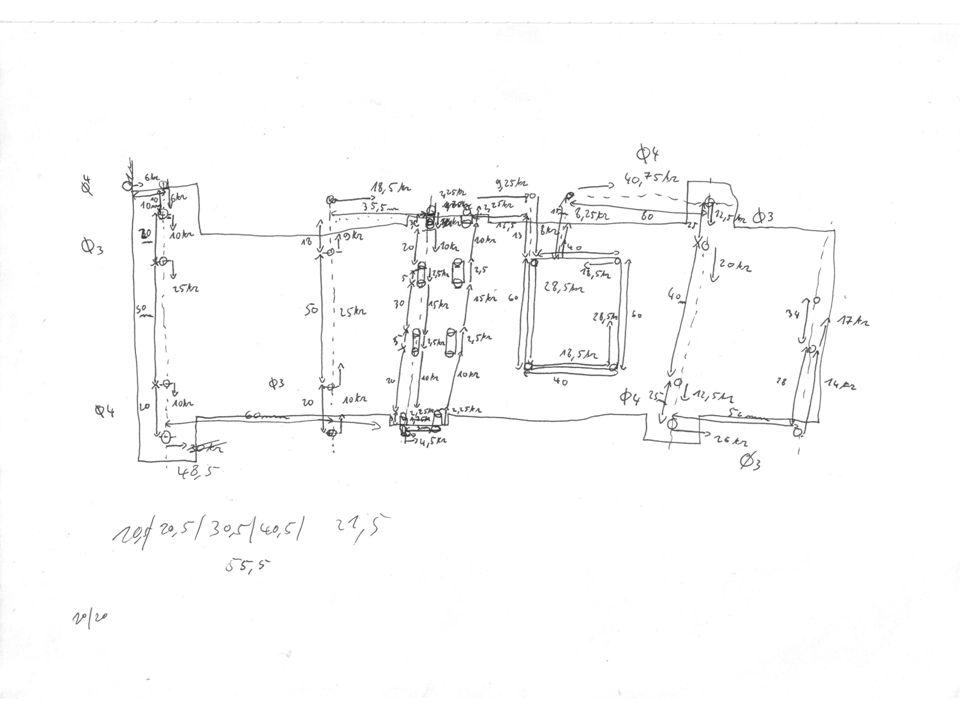
Etude Des Dimensions A partir d’images trouvées sur le site de lynxmotion, nous avons réalisé le robot avec le logiciel de 3D, Solidworks sans connaître les dimensions réelles du modèle ni ses proportions.

21
Utilisation Du Logiciel MotionWorks
Nous avons rencontré un problème au niveau des dimensions des pattes centrale, nous voulions un débattement maximal mais avec des pièces résistantes et de même dimension que les autres. Pour cela nous avons réalisé une animation avec l’aide de MotionWorks pour étudier les proportions idéales de toutes les pièces composant les pattes centrale.

24
Conception Du Robot Pré usinage
Nous avons tout d’abord pré-usiné (coupe en gros) les différentes pièces du robot grâce à une scie à bande et aux documents créés sous SolidWorks pour l’ébauche.
 les différentes pièces du robot grâce à une scie à bande et aux documents créés sous SolidWorks pour l’ébauche.")
26
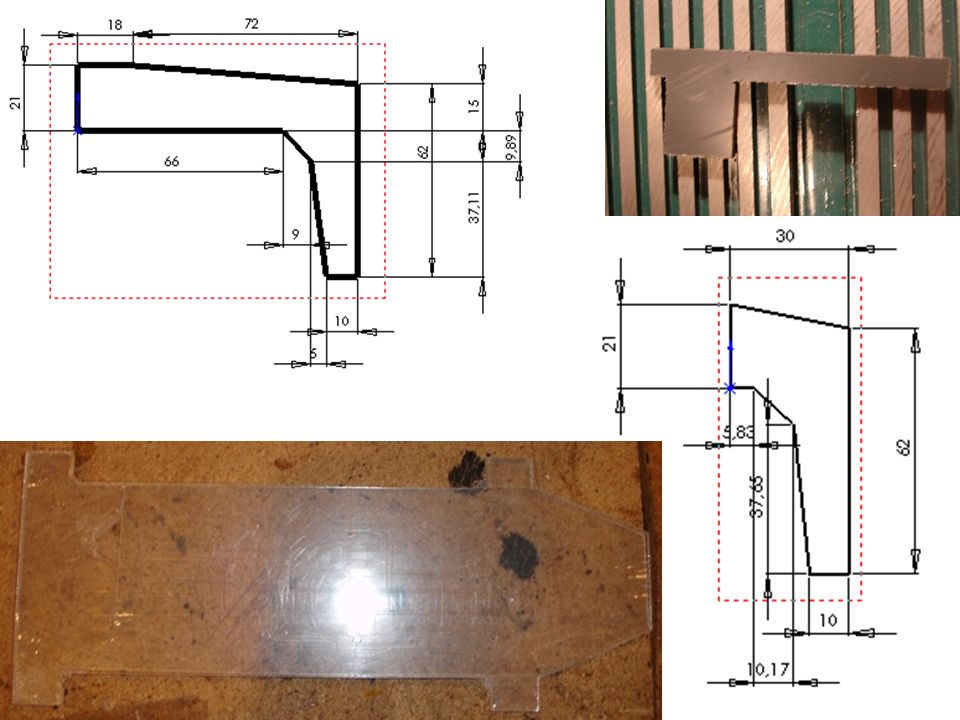
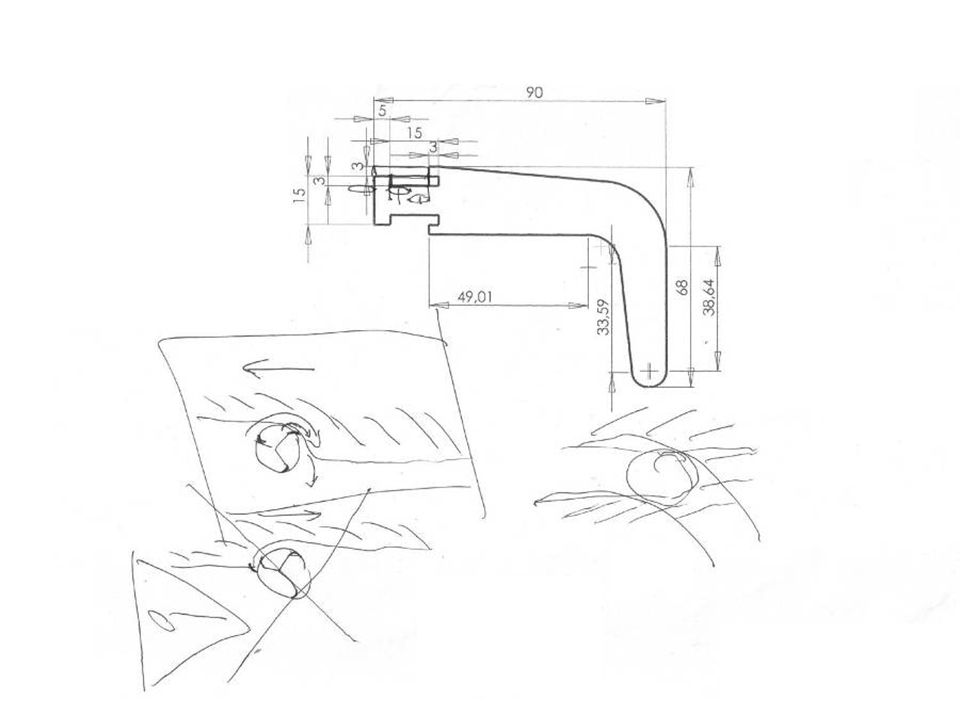
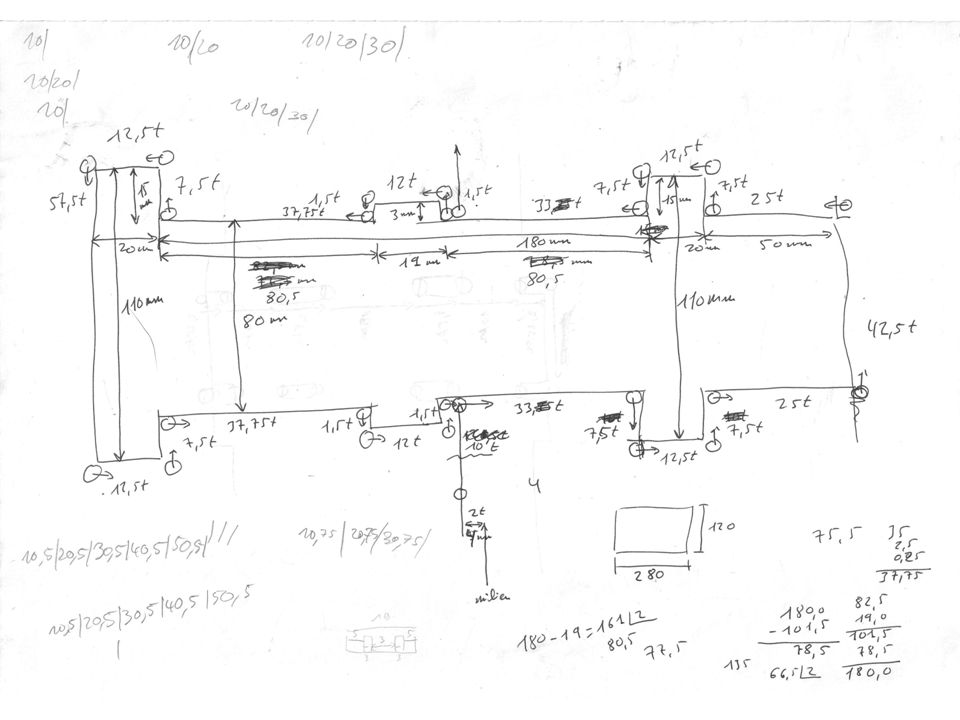
Usinage de Précision Puis nous avons utilisé une fraiseuse manuelle à trois axes. Les pages ci-dessous montrent les brouillons de méthodes pour l’usinage. Nous avons rencontré certains problèmes au niveau de la création des 2 plaques centrales du robot à cause de leurs grande taille par rapport à la taille de la fraiseuse et par rapport au matériaux initialement prévu : du plexi-glace.

30
Les différentes pièces du robot après l’usinage.

31
Le bâtit.

32
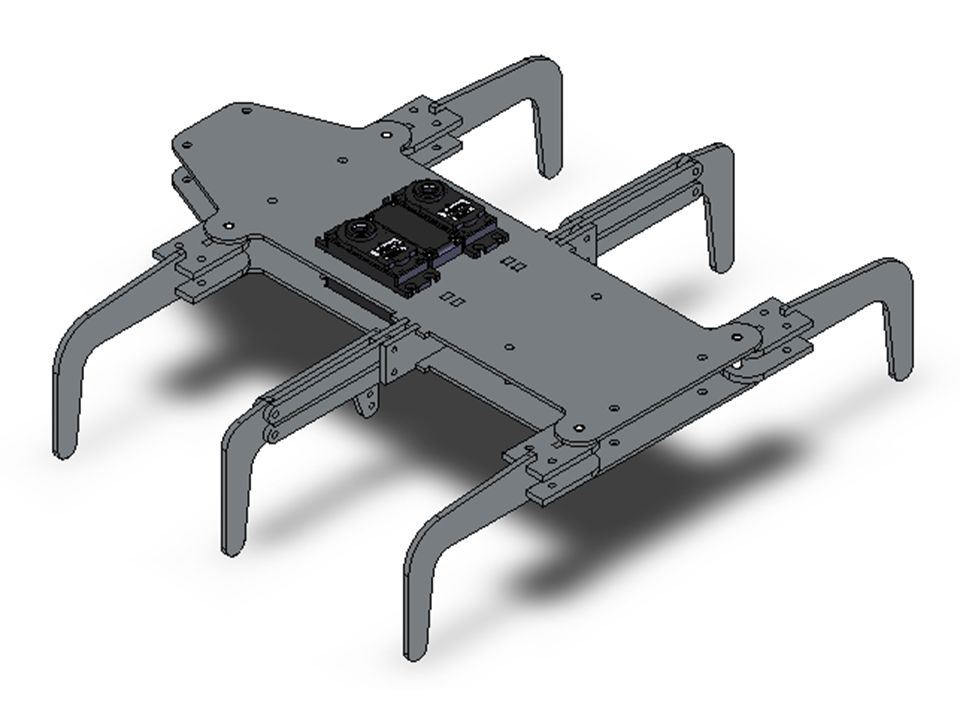
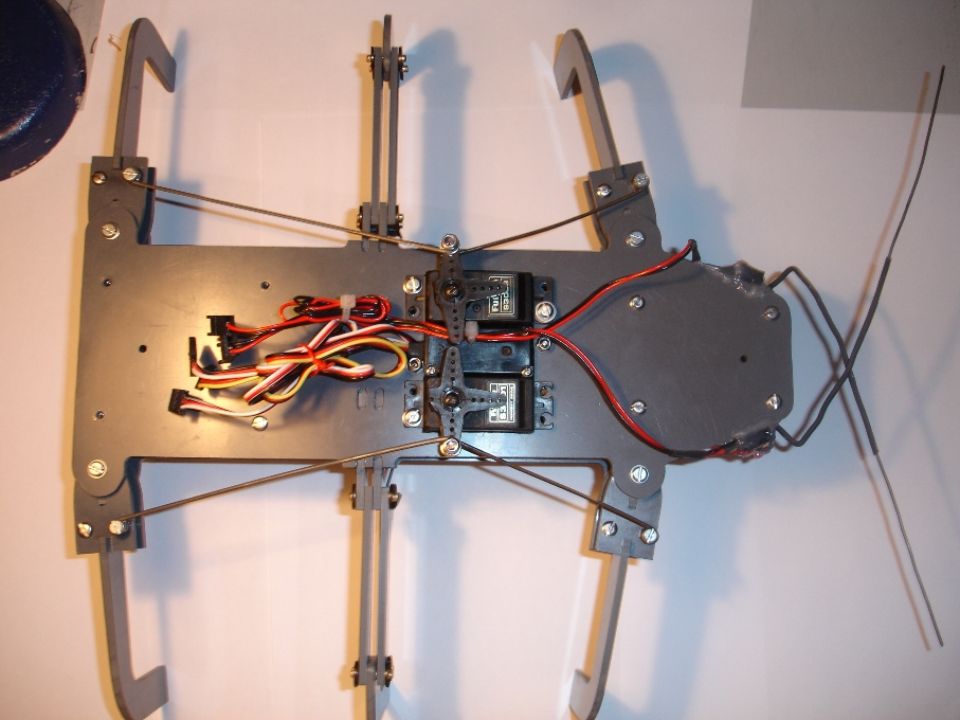
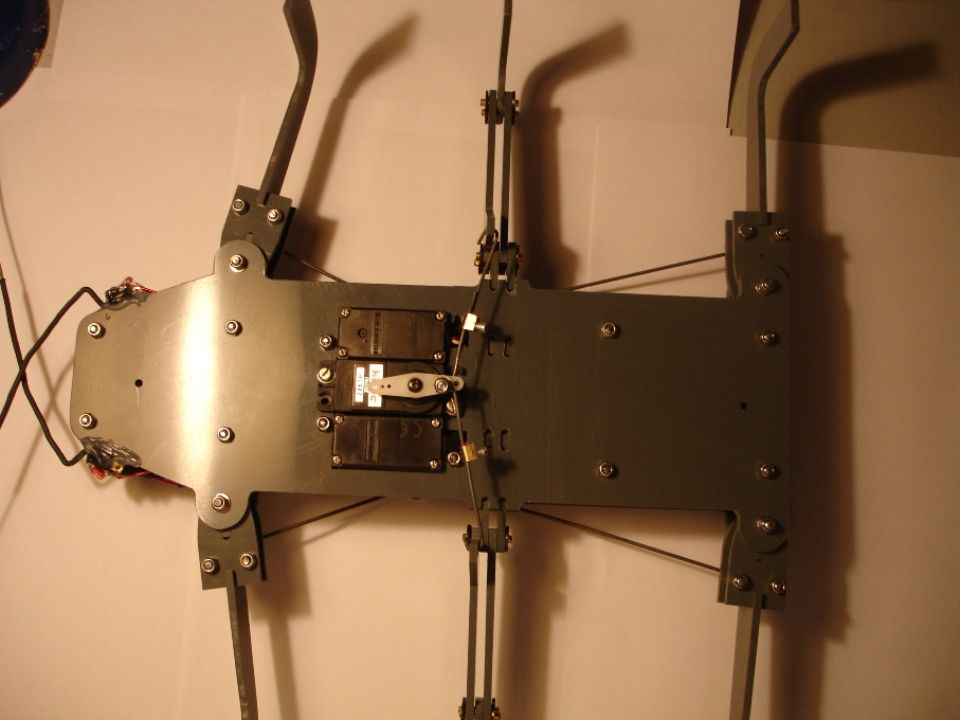
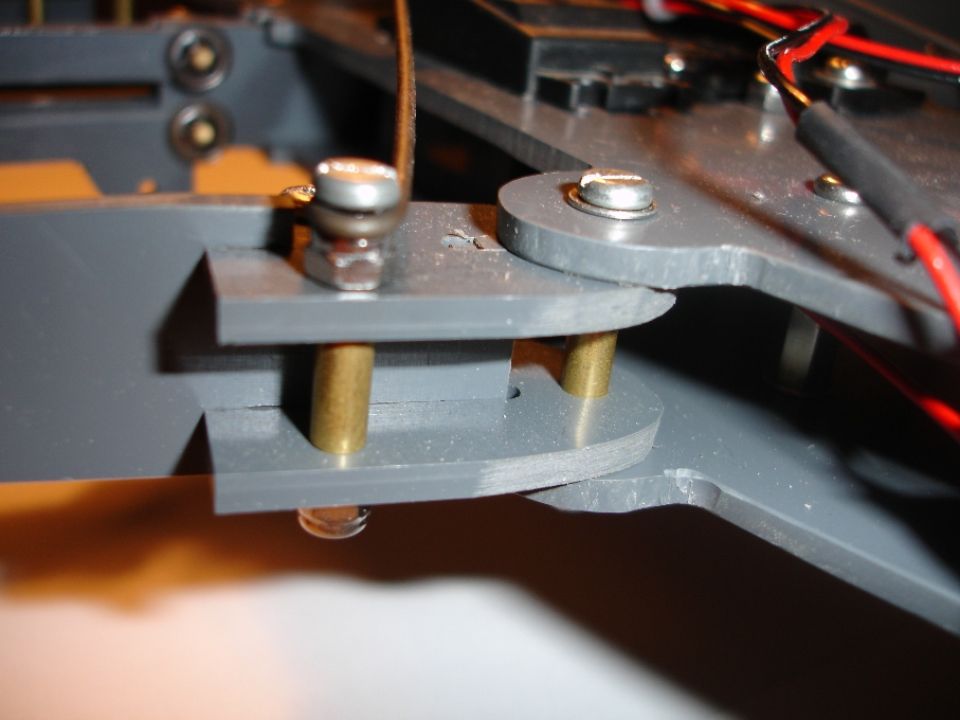
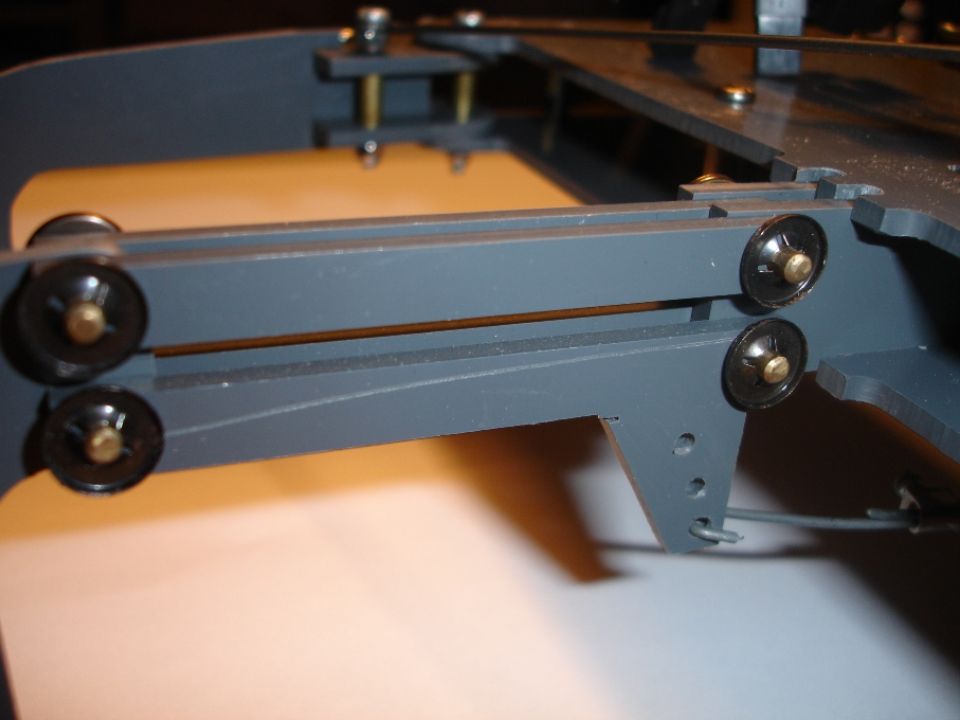
Montage Du Robot Une fois toutes les pattes usinées, ainsi que les deux grandes plaques centrales, nous avons assemblé le tout avec des vis de 3mm de diamètre, des écrous normaux et autobloquants, des rondelles normales et bloqueuses, des axes et des tubes en laiton.

43
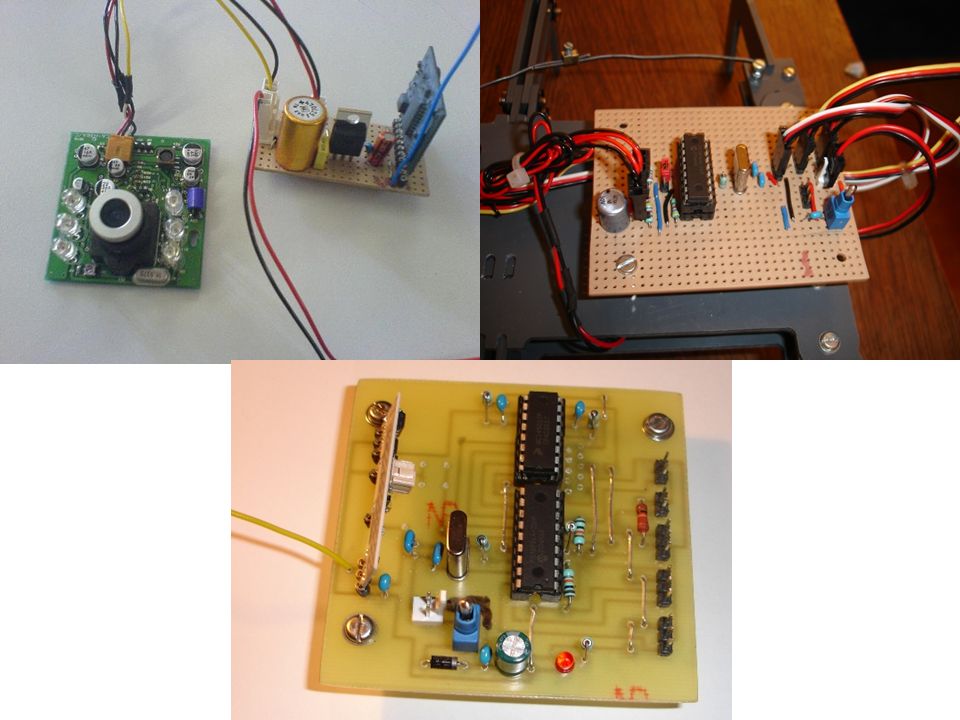
Electronique La partie électronique du robot ce résume à l’interface entre le PIC et les servomoteurs. Nous avons dû ensuite réaliser la carte de la caméra qui comprend une alimentation stabilisée et un émetteur vidéo. Tous les circuits ont d'abord été réalisé en platines de test et seulement après en circuit imprimé.

45
Carte Du Robot Carte d’alimentation du robot :
Elle comprend un connecteur, un interrupteur, une diode de protection, 2 condensateurs pour les parasites et une LED d’indication de fonctionnement.

46
Sur le reste de la carte du robot il y a le microcontrôleur, son horloge, et les connecteurs pour les servomoteurs et les capteurs.

47
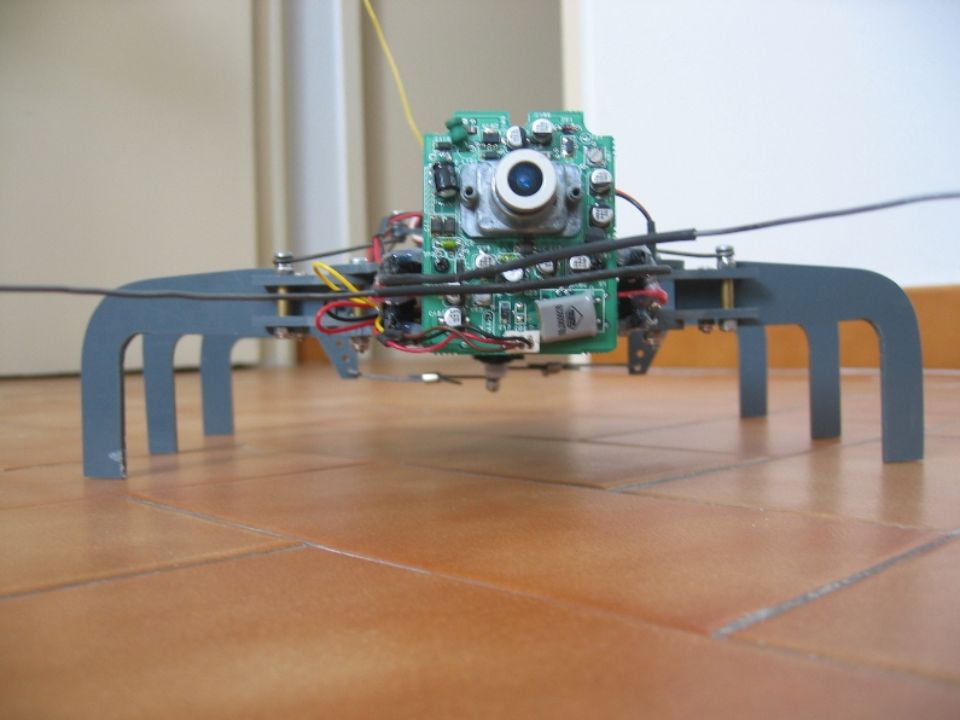
Emetteur Vidéo La carte de l’émetteur de la camera embarqué comprend deux connecteurs pour les deux packs de piles nécessaire, un interrupteur, une diode de protection, un régulateur 5V, une LED d’indication de fonctionnement, le connecteur de la camera et enfin le module émetteur.

48
Télécommande Une fois le robot terminé, nous avons voulu l’améliorer. Nous avons donc pensé à rajouter une télécommande pour pouvoir choisir entre le mode automatique c’est-à-dire le mode autonome et le mode commande manuelle. Nous avons tout d’abord étudié les différents schémas mis a notre disposition sur les magasines pour finalement nous centrer sur un article d’électronique pratique que nous avons suivi en modifiant les possibilités pour que cela corresponde mieux à nos attentes. Nous avons donc réalisé en premier la partie électronique de la télécommande, puis le programme attenant à cette partie.

49
Voici la partie rajouté a la carte du robot pour recevoir le code de la télécommande.

50
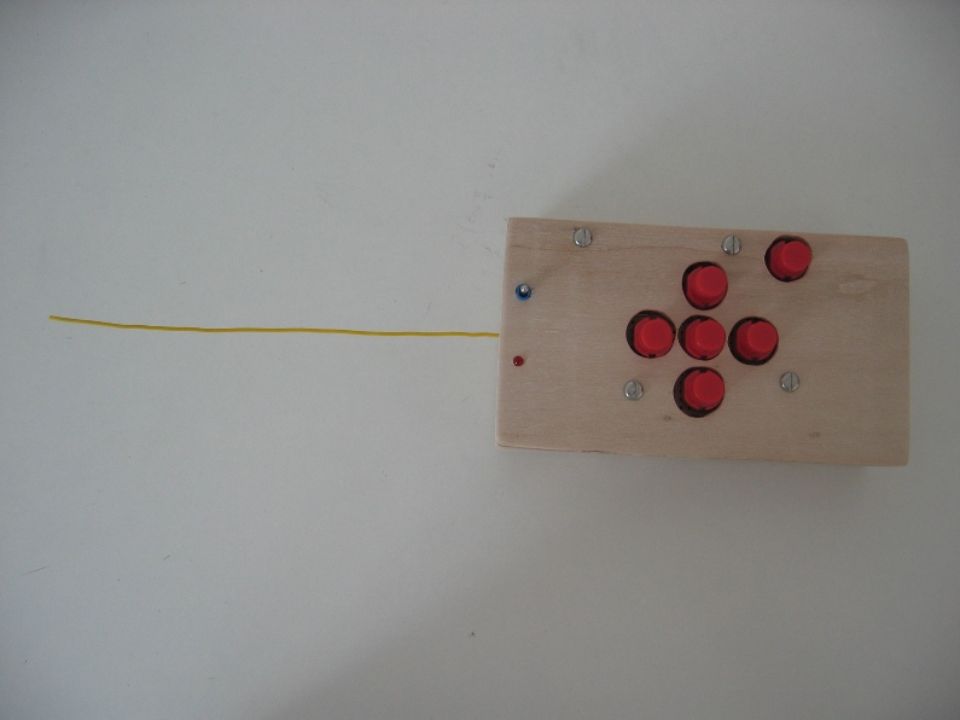
Et voici la télécommande, sans le clavier mais avec son alimentations, l’émetteur, le codeur et son réseaux de transistor qui permet une alimentation du circuit quand cas de sollicitations.

51
Typons Celui de la carte du robot, et celui de le carte de la télécommande, tout deux réalisé avec Ares.

52
Programmation Pour pouvoir programmer notre robot, nous avons dû choisir quel langage nous allions utiliser pour la programmation. Une fois cette première étape terminée, nous avons dû faire une étude du PIC16F84A, le microcontrôleur du robot.

53
Langage De Programmation
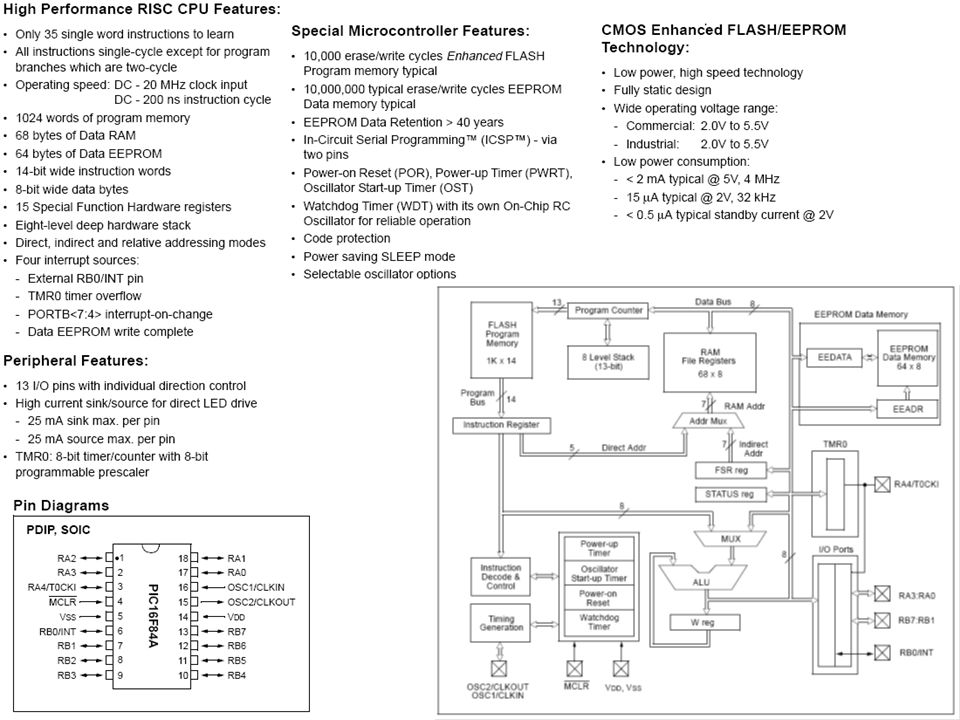
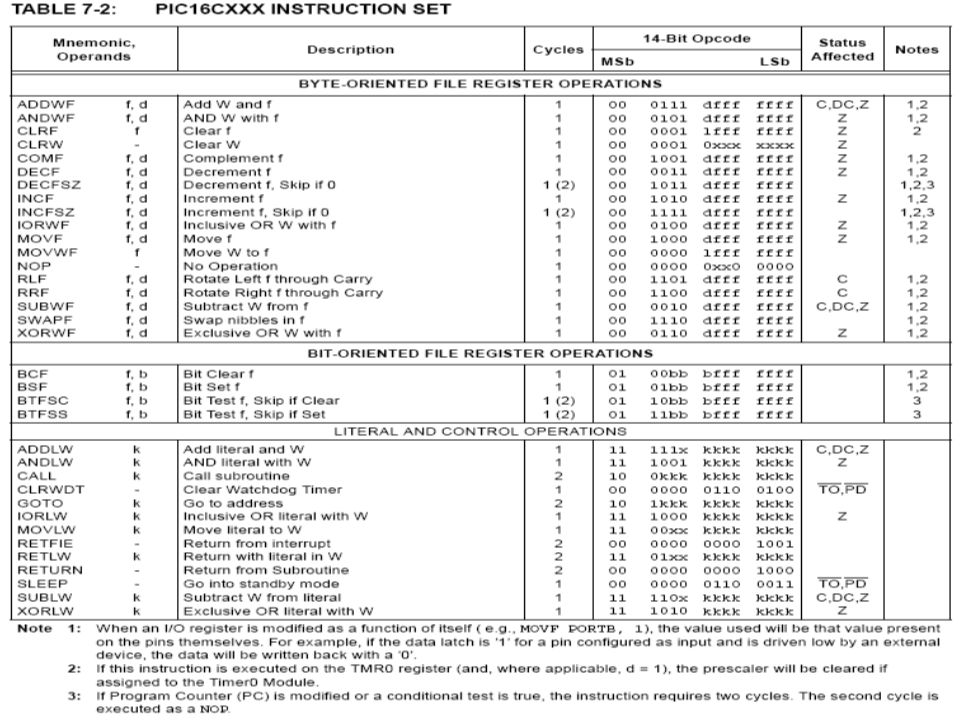
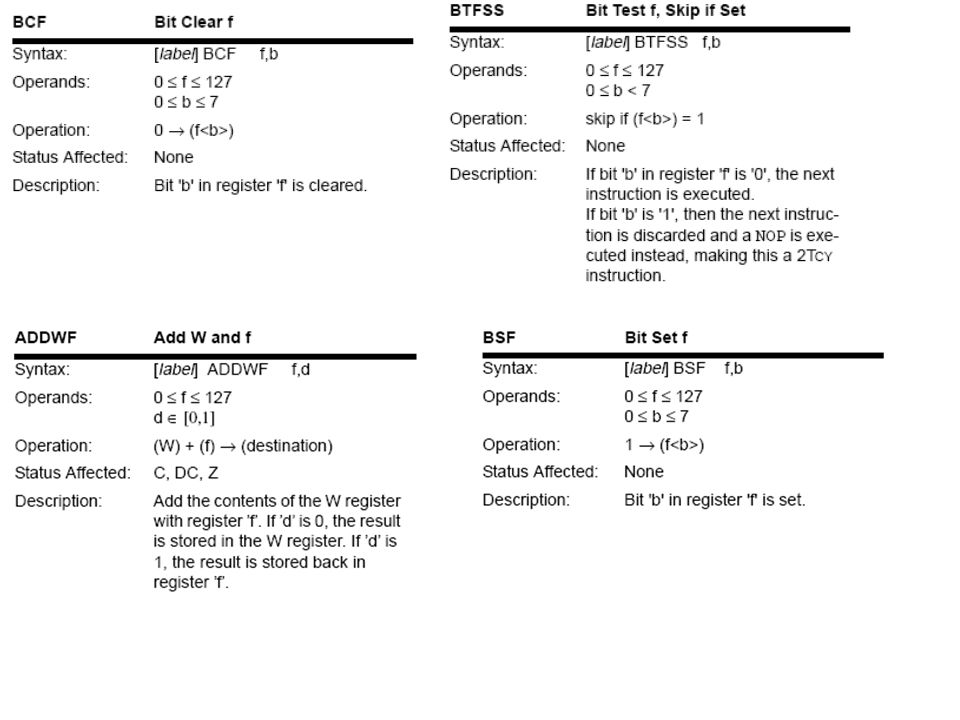
Dans le programme de S –SI nous commençons a apprendre le C avec le robot Hémisson mais nous n’étions de toute façons pas assez avancé comparé a la complexité du programme a réaliser. Alors nous nous sommes dit, quitte à apprendre à fond un langage de programmation autant en apprendre un nouveau. Nous avions la possibilité d’avoir une aide pour apprendre les bases et nous aider a la conception du programme mais seulement si nous programmions en assembleur. L’assembleur est un langage très proche de celui de la machine, l’étape avant le langage hexadécimal pur. Il n’y a que 35 instructions possible pour le PIC16f84A et avec ça tout est réalisable, il suffit de bien les combiner!

54
Introduction Au Programme
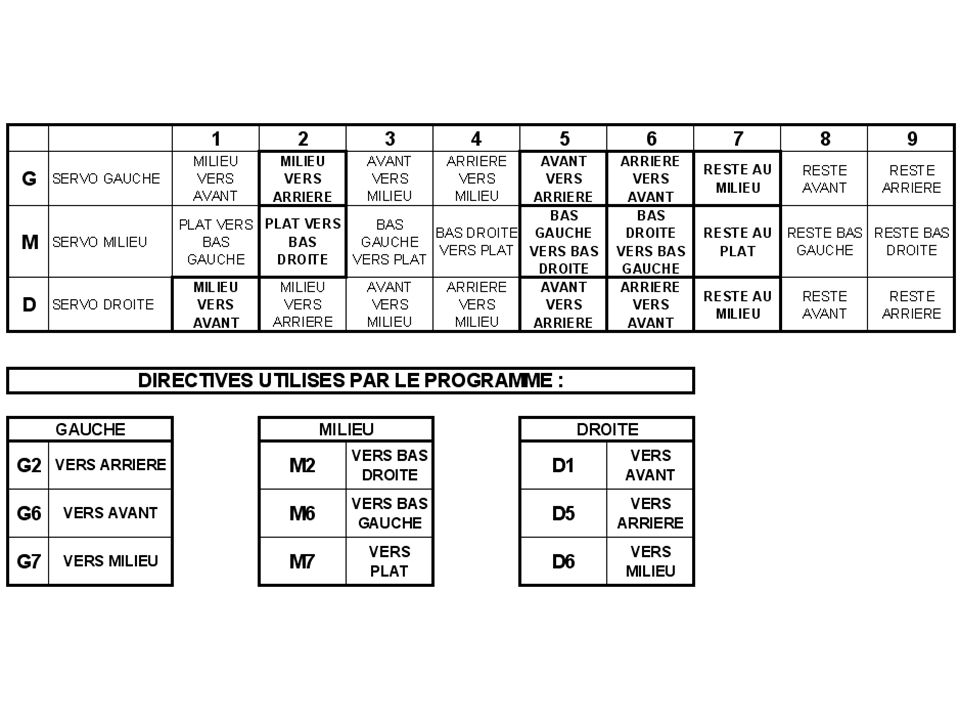
Avant d’écrire un programme il faut d’abord le préparer en le modélisant sous forme d’organigrammes, de Grafcet, de GEMMA, et de tout autre moyen disponible permettant une approche progressive. Premièrement nous étudierons les mouvements que permet la structure physique du robot et nous ne garderons que le minimum utiles.

56
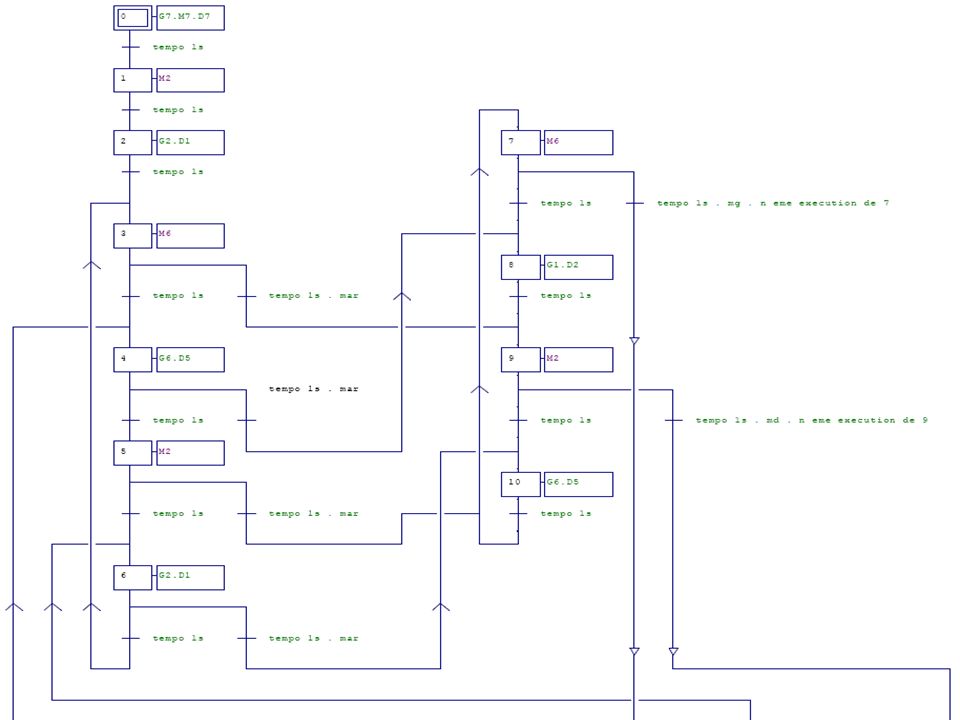
Ensuite nous avons fait un Grafcet pour définir l’enchainement de ses possibilités pour qu’elles réalisent un mouvement coordonné et stable

59
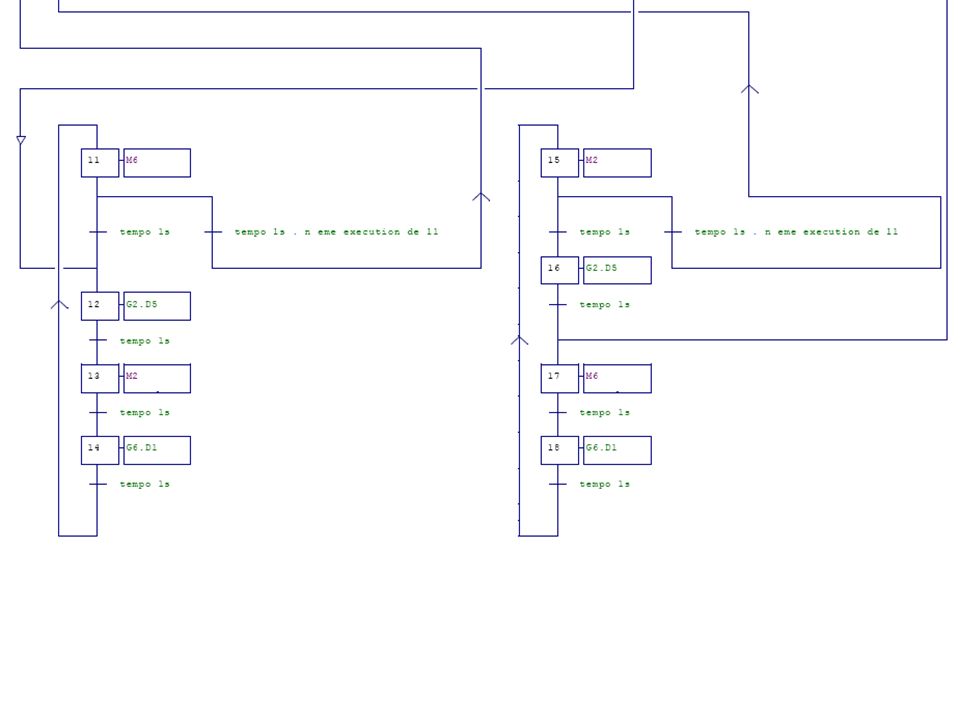
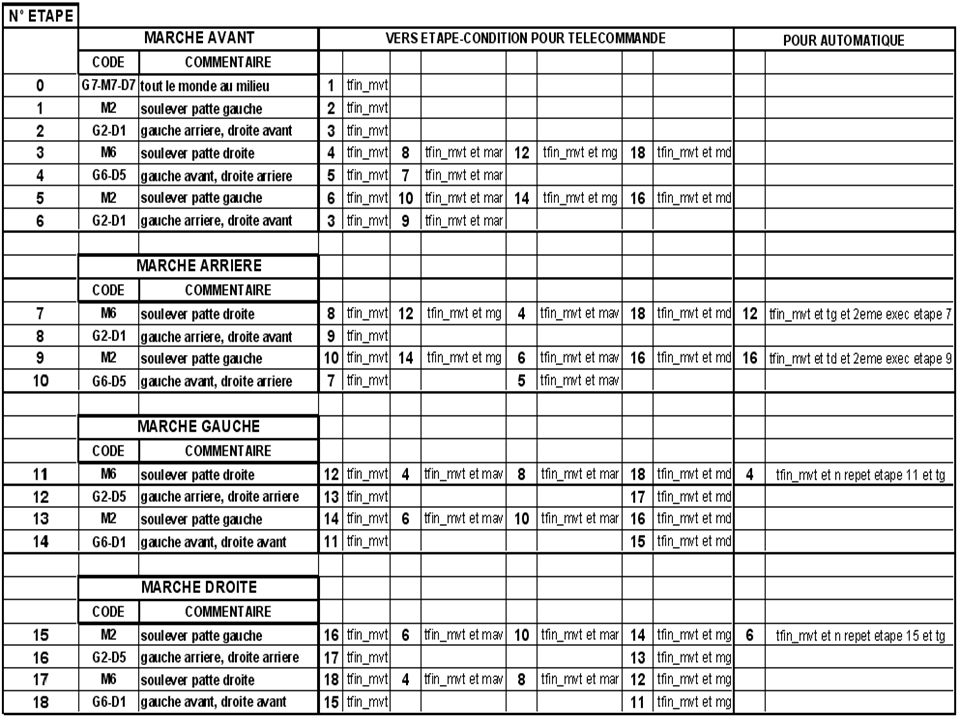
Pour pouvoir le traduire en assembleur, nous avons transformé ce Grafcet en donnant plus de détails et toutes les possibilités de transition entre les différentes marche.

61
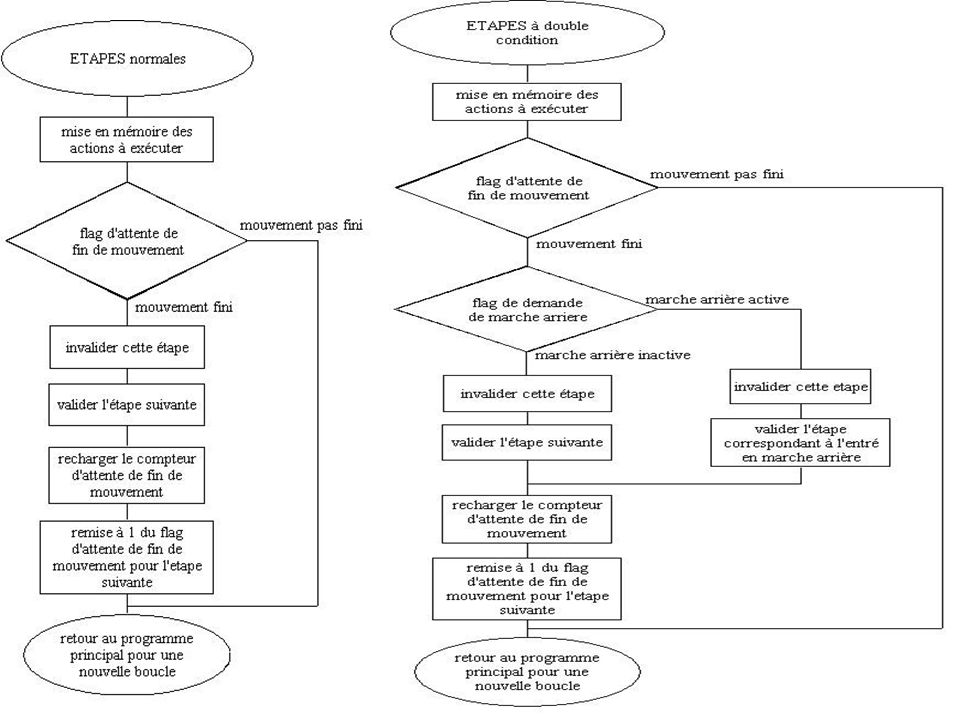
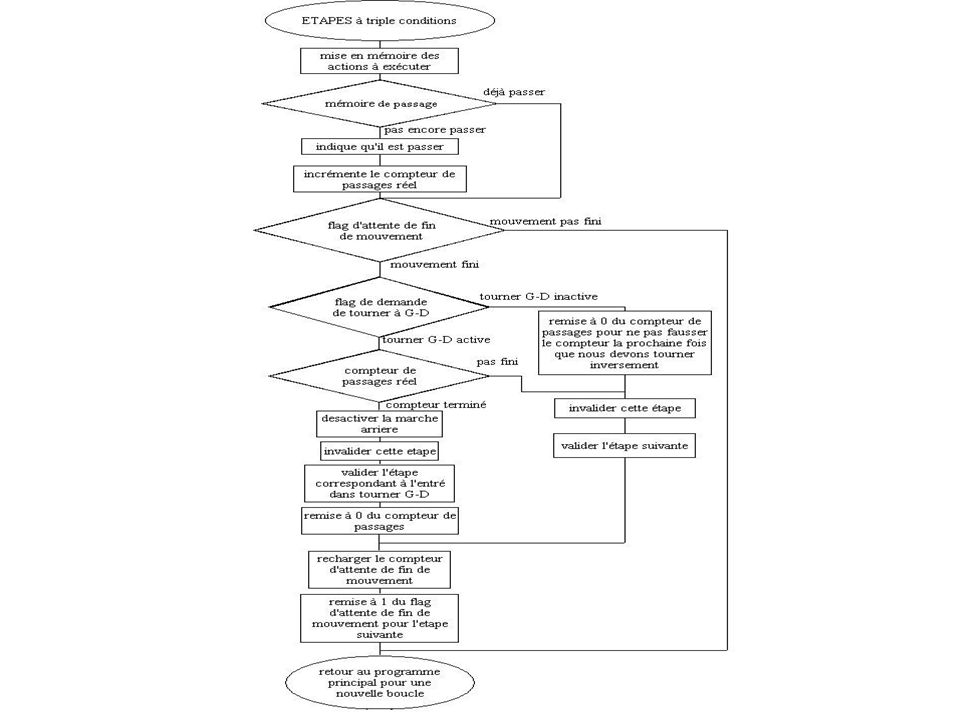
Chaque étapes a été ensuite réaliser en organigramme pour s’approcher de la méthode de programmation.

64
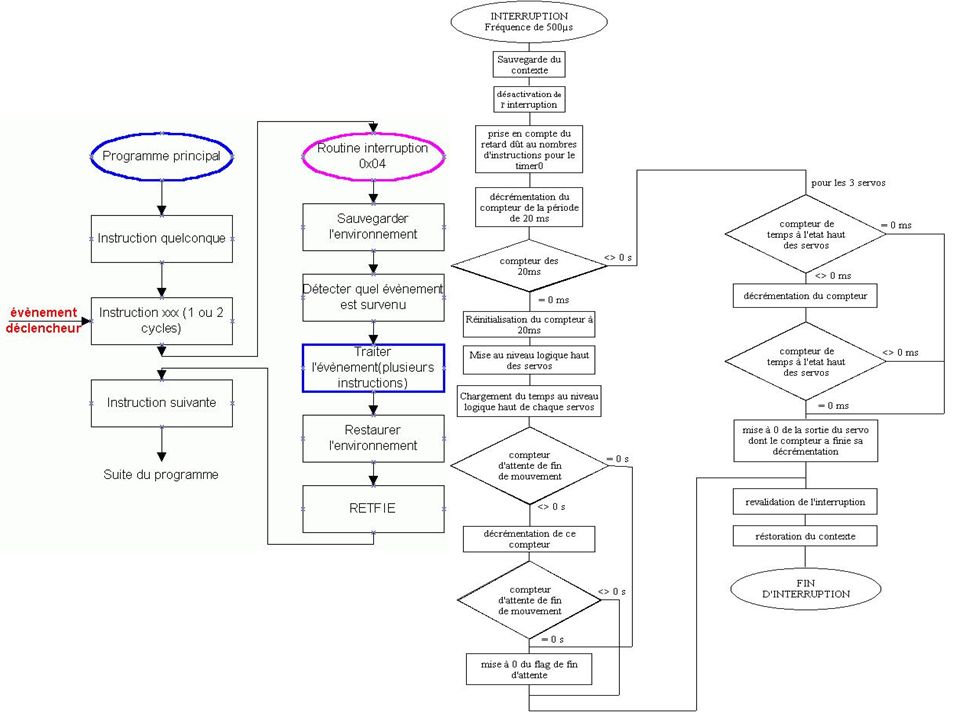
L'interruption Une interruption est lorsqu’un événement survint durant l’exécution du programme, il s’arrête alors là où il en était puis vas chercher les actions à faire lors d’une telle interruption. Nous utilisons une interruption qui ce déclenche tout les 0.5ms, ce qui nous permet de programmer le PWM. Nous avons fait un organigramme avec l’interruption bien que nous l’ayons modifié après car il ne convenait plus.

66
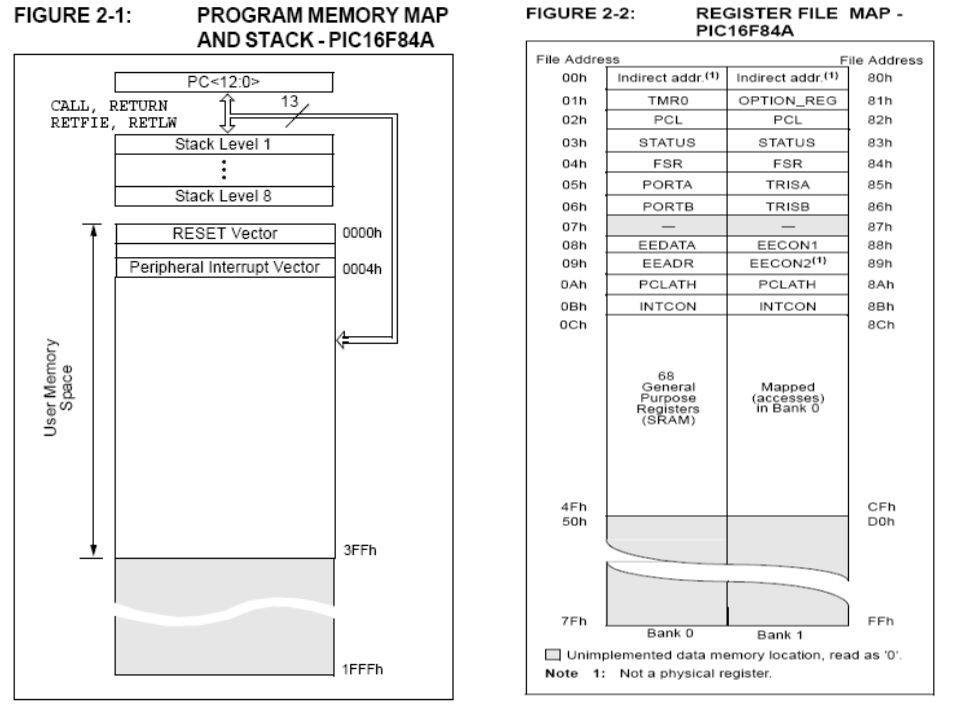
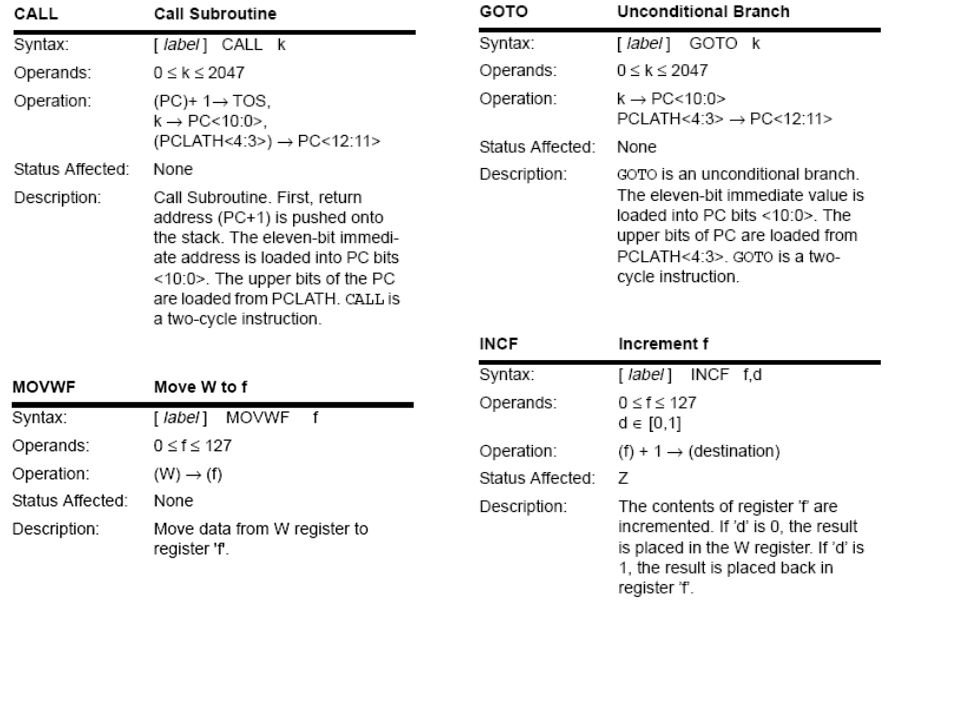
Etude Du Pic Ci-dessous les principales caractéristiques du microcontrôleur et les passages étudiés du datasheet pour le programme du robot.

72
Etude Du Programme Principales astuces de programmation et méthodes. (MPlab avec hexapode2.asm) MPlab
 MPlab.")
73
Modification du programme
Pour la prise en charge de la télécommande au niveau du programme de l’hexapode nous avons dû rajouter une interruption sous RB0 qui est la broche correspondant au code valide, réaliser un décodeur, et adapter le Grafcet. (hexapode6_1.asm) MPlab
 MPlab.")
74
Test Du Robot

75
Evolutions Futures/Possibles
Diriger automatiquement le robot vers une source de chaleur, lumière, bruit Optimiser le code Rajouter des capteurs Améliorer la télécommande et son mode de transmission Stabiliser et trouver des solution pour l'adhérence Optimiser la consommation

76
Conclusion Générale Ce projet nous a permit d’approfondir beaucoup de point que l’on aborde en sciences de l’ingénieur et ainsi de ce préparer à nos futurs choix d’orientation et de carrière professionnelle. Nous avons appris beaucoup de chose que normalement nous ne faisons que survoler ou que nous ne voyons pas en classe tel que la réalisation mécanique quelque peu complexe ou encore l’assembleur qui n’est pas au programme de terminale ce qui nous donne une avance considérable sur les années futures si nous continuons sur cette voix.

Présentations similaires