Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
contours et régions une des bases les plus importantes en traitement d’images (reconnaissance, amélioration d’images compression...) l’information est souvent dans les éléments de contour préserver les contours lisser les régions évaluer la taille des régions

2
1 - algorithmes d’analyse des contours
- Prewitt Sobel Cany Deriche - analyse dans le domaine des fréquences 2 - Transformée de Hough 3 - Découpe en régions 4 - Morphologie Mathématique 5 - contours actifs

3
contours et régions contour : variations rapides de l’intensité
dans une direction et lente dans la direction perpendiculaire pas d’invariance spatiale ! simplication courante : mise en évidence d’une variation rapide (calcul du gradient) il y a alors invariance
 il y a alors invariance.")
4
étapes de la détection de contour

5
appliquer un filtre passe haut
recherche des contours dans une image : trouver les zones où l’intensité présente une variation rapide : appliquer un filtre passe haut les filtres simples (prewitt, sobel) sont utilisés pour une détection des contours mais ne donnent qu’une évalutation approximative de l’orientation du contour prewitt (formes diagonales) sobel
 sont utilisés pour une détection des contours. mais ne donnent qu’une évalutation approximative de l’orientation du contour. prewitt. (formes diagonales) sobel.")
6
y Image originale. variation suivant y (module) combinaison des deux variation suivant x (module) x
 combinaison des deux variation suivant x (module) x")
7
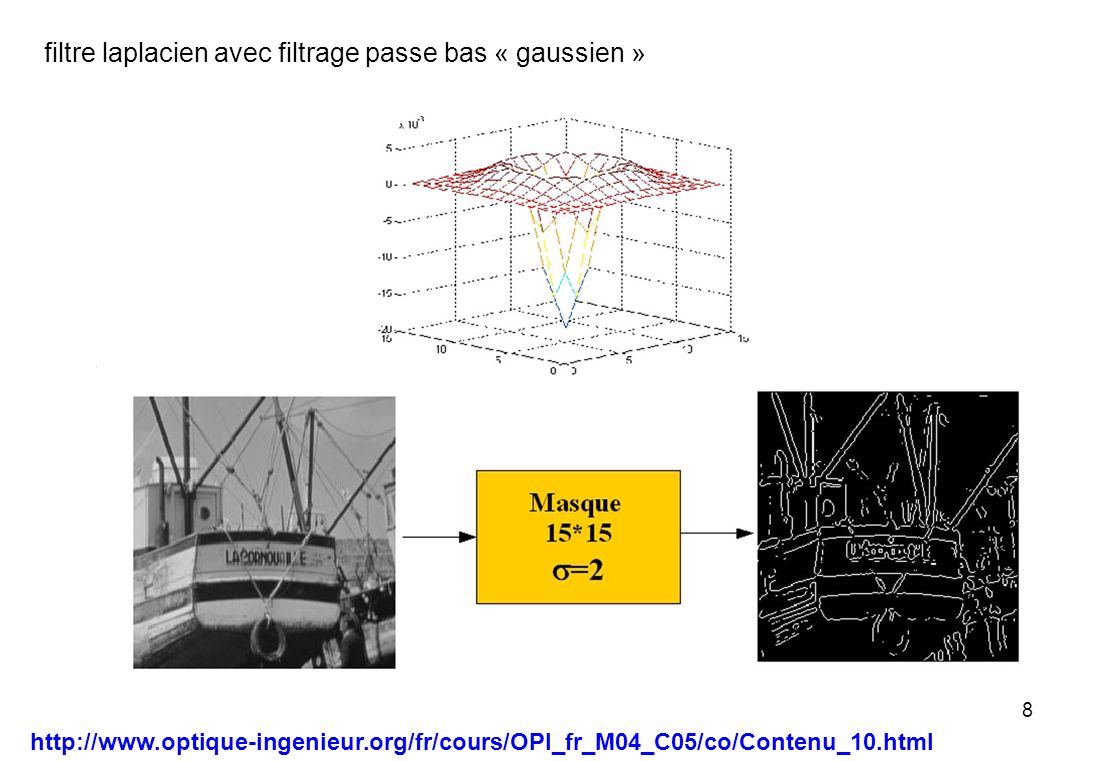
on peut aussi utiliser les passages à zéro de l’opérateur laplacien
variantes possibles de cette réponse impulsionnelle dérivée seconde = bruit amplifié = nécessité de lissage

8
filtre laplacien avec filtrage passe bas « gaussien »
9
filtre de Canny Deriche
Optimisation d’un critère caractérisant le contour : filtrage passe haut + lissage dans les deux directions (abscisse et ordonnée) par un filtre de réponse impulsionnelle double effet : dérivation pour les basses fréquences et lissage pour les hautes fréquences et de réponse en fréquence Deriche : implémentation sous la forme de filtres récursifs
 par un filtre de réponse impulsionnelle. double effet : dérivation pour les. basses fréquences. et lissage pour les. hautes fréquences. et de réponse en fréquence. Deriche : implémentation sous la forme de filtres récursifs.")
11
filtres grad/y grad/x fréquentiel spatial image module

12
gradient module du gradient

13
décision module du gradient supérieur à un seuil mais aussi gradient de même direction dans le voisinage (grand rayon de courbure )
")
14
décision concernant la présence ou non d’un contour
gradient élevé gradient de même orientation dans le voisinage (courbure faible) difficulté lorsque les images sont bruitées
 difficulté lorsque les images sont bruitées.")
18
Il n’y a pas de détecteur parfait ;
il faut essayer de formaliser l’objectif final du traitement où la recherche des contours n’est qu’une étape intermédiaire et, relativement à cet objectif, évaluer les performances d’un détecteur : proportion de détections correctes, de détections manquées et de fausses détections

19
recherche de la pente exacte d’un contour dans une image
contourner le problème de la quantification par une implémentation des filtres de dérivation dans le domaine des fréquences

20
bleu : -p bleu clair pente vers –p/2 vert: pente vers 0 jaune pente vers p /2 rouge vers + p amplitude et direction du gradient

21
calcul d’une dérivée dans le domaine des fréquences
la dérivée par rapport à x de f(x,y) a pour transformée de Fourier (filtrage amplifiant les composantes proportionnellement à la fréquence) on a de la même manière la dérivée par rapport à y (on remplace u par v)
 a pour transformée de Fourier. (filtrage amplifiant les composantes proportionnellement à la fréquence) on a de la même manière la dérivée par rapport à y (on remplace u par v)")
22
Calcul de dérivée partielle en deux dimensions par transformée de Fourier
(N est une puissance de 2) 1. on calcule transformée de (lignes et colonnes marquées en bleu) on suppose que 2. on effectue l’opération de « centrage » (fftshift en matlab) v v N-1 N/2-1 N/2 N-1 u u N/2 N/2 N-1 N/2 N-1 N/2-1
 1. on calcule. transformée de. (lignes et colonnes marquées. en bleu) on suppose que. 2. on effectue l’opération de « centrage » (fftshift en matlab) v. v. N-1. N/2-1. N/2. N-1. u. u. N/2. N/2. N-1. N/2. N-1. N/2-1.")
23
(ne pas confondre l’adresse dans le tableau et l’abscisse u)
après recentrage 3 .on multipie par précision : ici u varie de –N/2 à N/2 - 1 (ne pas confondre l’adresse dans le tableau et l’abscisse u) sans recentrage 4. on effectue l’opération inverse du « recentrage » (ce qui revient à faire à nouveau un « recentrage ») 5. on calcule la transformée de Fourier inverse qui donne la dérivée partielle par rapport à x bien sûr il faut vérifier sur des exemples simples comme des sinusoïdes de la forme où k et ℓ sont des entiers
 sans. recentrage. 4. on effectue l’opération inverse du « recentrage » (ce qui revient à faire à nouveau un « recentrage ») 5. on calcule la transformée de Fourier inverse. qui donne la dérivée partielle. par rapport à x. bien sûr il faut vérifier sur des exemples simples. comme des sinusoïdes de la forme. où k et ℓ sont des entiers.")
24
en faisant les mêmes opérations mais en multipliant par jv on obtient la
dérivée partielle par rapport à y ; note : on peut se contenter d’effectuer des transformées de Fourier monodimensionnelles, ligne par ligne ou colonne par colonne la pente de la tangente au contour (courbe de niveau) est donnée par la valeur en ce point de
 est donnée par. la valeur en ce point de.")
25
analyse de la courbure pour calculer les dérivées secondes, il faut remplacer la multiplication par ju par des multiplications par –u2, -uv,-v2 ce qui donne le rayon de courbure du contour est donné par (et à utiliser avec prudence sur des images réelles ! le résultat peut être très bruité ...) (remarque : facteur N/2.p si on utilise la transformée de Fourier discrète) à titre de vérification le cas particulier
 (remarque : facteur N/2.p si on utilise la transformée de Fourier discrète) à titre de vérification le cas particulier.")
26
un contour : le module du gradient est fort la courbure est souvent faible (grand rayon) sur plusieurs pixels voisins (ce deuxième critère est rarement pris en compte sur les images réelles car il est difficile de mesurer la courbure du fait du bruit) points caractérisitiques (angles) : le module du gradient est fort la courbure présentant un pic (forte discontinuïté de la pente du gradient)
 points caractérisitiques (angles) : le module du gradient est fort. la courbure présentant un pic. (forte discontinuïté de la pente du gradient)")
27
voici une illustration
dérivées par rapport à x et y fondée sur la transformée de Fourier comme expliqué précédemment (en coupe)
")
28
les courbes de niveau de la fonction f à droite et à gauche
l’angle de la tangente en chaque point bleu =- p, vert =0, rouge =+ p (les contours sont orientés donc la pente va de -p sont à p

29
résultat semblable au précédent mais en champ de vecteur
avec une longueur des vecteurs pondérée par le module du gradient -p p p/2 -p/2

30
en complément (peut etre pas utile dans un premier temps) analyse de la courbure
calcul des trois dérivées secondes

31
calcul du rayon de courbure
rouge rayon très grand ; bleu rayon faible

32
courbe « en cloche » représentation des tangentes au contour

33
rayon de courbure coupe notez les effets de bord dûs à l’utilisation de la TF discrète

34
fluctuations d’amplitude peu visibles sur l’image

35
réglage : se faire une idée des variations de niveau dans le type d’image

36
approche par modélisation
on se donne la forme du modèle dont on espère qu’il représente correctement une portion de contour : par exemple une sigmoïde orientée dans une direction (dans le cas d’un contour séparant deux régions de niveau à peu près constant et pas trop bruité)
")
37
et on cherche à trouver les paramètre
qui minimisent l’écart entre le modèle et l’image gx,y il peut y avoir des modèles plus élaborés

38
regroupement d’éléments de contours (chaînage)
il faut dans certaines applications regrouper les éléments de contours qui se suivent en une chaîne connexité (le voisin appartient à un contour) mais les risques d’erreurs dus à l’imperfection de la détection sont importants prise en compte de l’orientation q du contour est ce que à partir de C, à une distance raisonnable (quelques pixels) dans la direction proche de q, il y a un élément de contour de pente proche de q ?
 mais les risques d’erreurs dus à. l’imperfection de la. détection sont importants. prise en compte de l’orientation q. du contour. est ce que à partir de C, à une distance raisonnable. (quelques pixels) dans la direction. proche de q, il y a. un élément de contour de pente proche de q")
39
en général un point de contour correspond à un gradient élevé
et à un voisinage où il y a aussi des points de contour présentant un gradient élevé dans la même direction confirmation de l appartenance au contour si dans le voisinage du pixel étudié (dans la direction perpendiculaire au gradient), il y a suffisamment de pixels de contour avec une orientation similaire du gradient
, il y a. suffisamment de pixels de contour. avec une orientation similaire du gradient.")
40
filtrage sélectif dans la direction du contour
(voir aussi la morphologie mathématique)
")
41
v y u x réponse en fréquence réponse impulsionnelle décalée et orientée filtrage sélectif dans la direction du contour (voir aussi la morphologie mathématique) suivi d’une nouvelle application de l’opération de seuillage
 suivi d’une nouvelle application de l’opération de seuillage.")
42
filtrage directionnel dans le sens du contour
très allongé peu allongé les pixels détectés comme faisant partie d’un contour discontinu ont leur intensité amplifiée (par addition de celles des voisins) ; ce qui n’est pas le cas pour les pixels isolés ou n’ayant pas la même orientation que celle de leurs voisins
 ; ce qui n’est pas. le cas pour les pixels isolés ou n’ayant pas la même. orientation que celle de leurs voisins.")
43
réponse impulsionnelle
filtrage sélectif dans la diretion du contour prenant en compte la courbure (supposée connue)
")
44
détection d’angles deux contours à courbure faible se rejoignent
(l’extrémité de l’un est à une distance faible de l’autre « T » ou d’une extrémité de l’autre « L ») points caractéristiques en général très informatifs importants par exemple en stéréovision et en robotique ou en mise en correspondance d’images
 points caractéristiques en général très informatifs importants. par exemple en stéréovision et en robotique. ou en mise en correspondance d’images.")
45
détection de formes connues (typiquement de droites)
transformée de Hough représentation de la droite ensemble des droites qui passent par le point A dans l’espace des paramètres un point appartient à une multitude de droites (ensemble des points sur une sinusoïde) : si plusieurs point appartiennent à une même droite, les sinusoïdes ont un point commun ; cette accumulation permet de détecter des droites ou plus généralement des formes simples
 : si plusieurs point appartiennent à une même droite, les sinusoïdes ont un point commun ; cette accumulation permet de. détecter des droites ou plus généralement des formes simples.")
46
droite 2 paramètres ellipse 5 paramètres

47
transformée de Hough inconvénient : quantité de calculs importante remarque : si la pente de la droite a pu être mesurée (par exemple la pente d’un contour), alors le domaine où on recherche les accumulations peut être considérablement réduit r A représentation (r,q) des droites passant par le point A
, alors le domaine où on. recherche les accumulations peut être considérablement réduit. r. A. représentation (r,q) des droites passant par le point A.")
48
RECHERCHE DES POINTS APPARTENANT A UN CERCLE EN UTILISANT LA TRANSFORMEE DE HOUGH

49
TRANSFORMEE DE HOUGH EXEMPLE DE LA RECHERCHE DES POINTS APPARTENANT
A UN CERCLE TOUS LES CERCLES PASSANT PAR UN POINT DE COORDONNEES (A1,B1) SONT TELS QUE LE RAYON R ET LES COORDONNEES DU CENTRE ET VERIFIENT L’EQUATION ILS SONT SUR UN CÔNE DE SOMMET (A,B,0) DANS L ESPACE A TROIS DIMENSIONS
 SONT TELS QUE LE RAYON R ET LES COORDONNEES DU CENTRE. ET VERIFIENT L’EQUATION. ILS SONT SUR UN CÔNE DE SOMMET (A,B,0) DANS L ESPACE. A TROIS DIMENSIONS.")
50
ILS SONT SUR UN CÔNE DE SOMMET (A1,B1,0) DANS L ESPACE
A TROIS DIMENSIONS (A1,B1)
")
51
LES REPRESENTANTS DE TOUS LES CERCLES PASSANT PAR DEUX POINTS
SONT SUR L INTERSECTION DE DEUX CONES (SOIT UNE HYPERBOLE SITUEE DANS UN PLAN VERTICAL MEDIATEUR DU SEGMENT JOIGNANT LES DEUX POINTS) (A1, B1) (A2, B2)
 (A1, B1) (A2, B2)")
52
LE REPRESENTANT D UN CERCLE PASSANT PAR 3 POINTS EST
L INTERSECTION DE TROIS CONES (OU DE L HYPERBOLE ET DU TROISIEME CONE) (A3,B3) (A2, B2) (A1, B1)
 (A3,B3) (A2, B2) (A1, B1)")
53
Un cône représente l’ensemble des cercles passant par un point
Le point d’intersection de trois cônes caractérise le cercle passant par trois points

54
Si plusieurs points appartiennent au même cercle, les cônes correspondants ont
un point commun (mesures sans bruit) ; dans le cas de mesures bruitées les points d’intersection des cônes pris 3 à 3 sont groupés au voisinage de ce point Trouver le cercle revient à détecter ces concentrations de points dans l’espace des paramètres
 ; dans le cas de mesures bruitées les points. d’intersection des cônes pris 3 à 3 sont groupés au voisinage de ce point. Trouver le cercle revient à détecter ces concentrations de points dans l’espace. des paramètres.")
55
S IL Y A PLUSIEURS POINTS APPARTENANT A UN MEME CERCLE
CE CERCLE EST REPRESENTE PAR L INTERSECTION DE TOUS CES CONES COMME LES DONNEES SONT BRUITEES LA RECHERCHE D UN CERCLE SE TRADUIT PAR LA DETECTION D UN NUAGE DE POINTS ASSEZ CONCENTRE DANS CET ESPACE DES PARAMETRES

56
ON ABOUTIT A UN PROBLEME CLASSIQUE DE PROBABILITES
UN PIXEL DE CONTOUR A LA PROBABILITE p D APPARTENIR AU CERCLE ET LA PROBABILITE 1-p DE NE PAS LUI APPARTENIR COMBIEN FAUT IL PRELEVER DE PIXELS DE CONTOUR POUR QUE LA PLUPART DU TEMPS AU MOINS K D ENTRE EUX APPARTIENNENT AU CERCLE

57
fonction de répartition de la loi binomiale
une chance sur 2 que le point appartienne au cercle 20 éléments mesurés : il y a 99% de chances que 25% d’entre eux au moins appartiennent au cercle 100 éléments mesurés : il y a 99% de chances que 38% d’entre eux au moins appartiennent au cercle

58
en général possibilité de traitement à une dimension :
lissage de l’histogramme et recherche du maximum

59
recherche accélérée d’un cercle basée sur la transformée de Hough
1 Sélection des points de contour et de leur orientation B A C D 2. les deux droites tracées à partir de deux points A et B dans la direction du gradient se rencontrent en un point C équidistant de A et de B. Dans l’affirmative, C peut être un centre du cercle de rayon R passant par A et B; 3. Est-ce que cette hypothèse est confirmée par d’autres points (D) situés à une distance R de C et où le gradient est colinéaire à CD ? en pratique : prendre en compte les incertitudes sur les données
 situés à une. distance R de C et où le gradient est colinéaire à CD en pratique : prendre en compte les incertitudes sur les données.")
60
Comment accélérer la méthode de la transformée de Hough lorsqu’on
dispose d’informations supplémentaires sur la forme recherchée ? Trois points ayant une probabilité p d’appartenir au cercle permettent de caractériser le cercle : position du centre et rayon R C’ C R’ Est-ce que ce cercle est le bon ? Dans l’affirmative, la probabilité est élevée que d’autres points appartiendront à la même figure (et vérifient les équations du cercle) Sinon il y a peu de chances que d’autres points appartiennent à cette figure
 Sinon il y a peu de chances que d’autres points appartiennent à cette figure.")
61
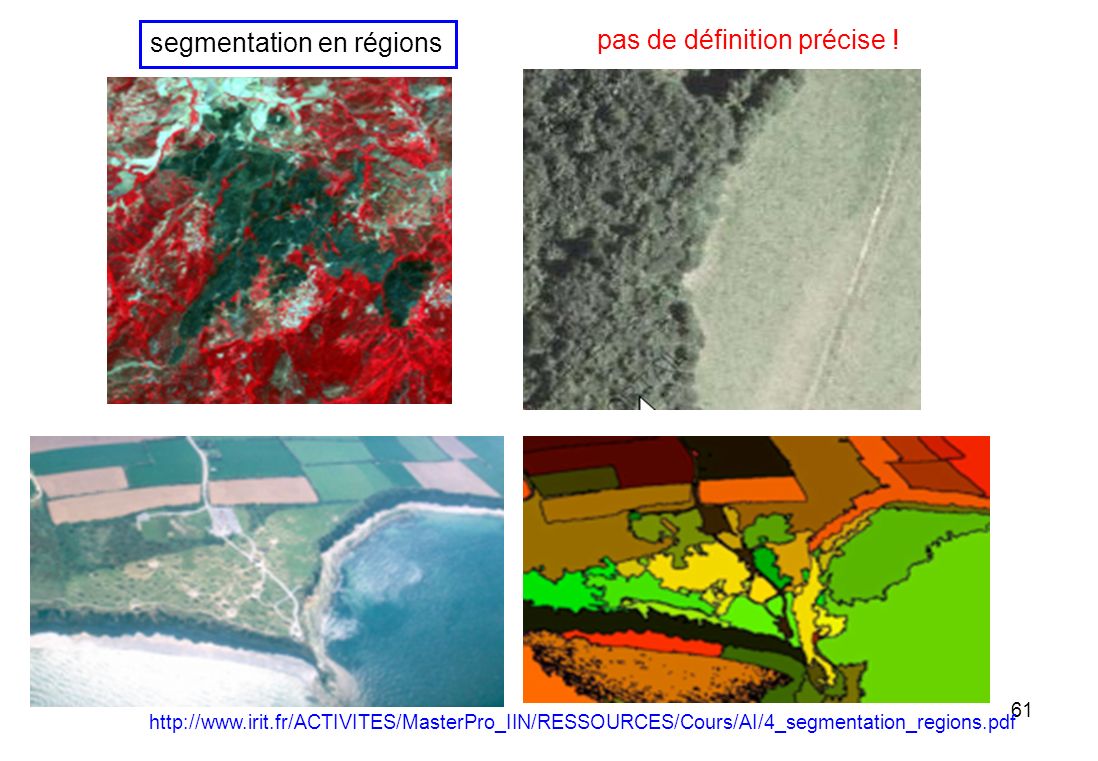
segmentation en régions pas de définition précise !
62
là encore il n’y a pas de solution parfaite
comment caractériser une région « homogène » ?

63
On associe à un pixel ou à un ‘‘petit’’ médaillon un vecteur de paramètres
qui tient compte des caractéristiques des pixels voisins ; en principe les pixels voisins d’un pixel (x,y) sont associés à des vecteurs assez semblables à celui du pixel (x,y) avec un certain degré de variabilité (il y a une certaine corrélation entre eux) pixel étudié pixels voisins n’appartenant pas à la même région pixels voisins appartenant à la même région vecteurs associé à un pixel et nuage de points des vecteurs associés aux pixels voisins problème : trouver les caractéristiques du ‘‘nuage de points’’ correspondant aux vecteurs des pixels entourant (x,y) ; vérifier que ce nuage est suffisamment compact et qu’il décrit correctement les caractéristiques de la région ; vérifier ensuite qu’il y a suffisamment de pixels voisins de (x,y) dont les vecteurs appartiennent au nuage pour que la région soit homogène
![]()
64
régions caractérisation statistique : stationnarité locale, corrélation spatiale (cf signaux aléatoires bidimensionnels) un paramètre change peu dans une région homogène (les pixels voisins appartiennent souvent à une même région) il varie d’une région à l’autre séparation des régions par des contours parfois difficiles à détecter ou inexistants cas simpliste de séparation en deux régions fondé sur l’histogramme
 il varie d’une région à l’autre. séparation des régions par des contours parfois. difficiles à détecter ou inexistants. cas simpliste. de séparation. en deux régions. fondé sur. l’histogramme.")
65
histogramme nécessité d’éliminer les points « isolés » (connexité)
")
66
ensuite prise en compte de la connexité :
en principe les caractéristiques statistiques des pixels d’une même région sont semblables (extension des méthodes du type morphologie mathématique) plus difficile : histogramme multidimensionnel (image couleurs) (nuages de points) ; analyse de texture : analyse spectrale 2D par exemple : prédiction (linéaire) d’un pixel à partir de ses voisins : est ce que la prédiction est correcte ? si oui le pixel appartient probablement à la même région que ses voisins
 plus difficile : histogramme multidimensionnel (image couleurs) (nuages de points) ; analyse de texture : analyse spectrale 2D. par exemple : prédiction (linéaire) d’un pixel à partir de ses voisins : est ce que la prédiction est correcte si oui le pixel appartient probablement à la même région. que ses voisins.")
67
analyse à partir de l’histogramme
découpe de l’histogramme en « tranches » + analyse de la connexité (voir morphologie mathématique)
")
69
difficultés de l’analyse liées à la non stationnarité
et parfois à la non pertinence du modèle « décomposition en régions »

70
exemple d’approche : une région est composée de pixels connexes (les voisins d’un pixel présentent les mêmes caractéristiques) de même niveau moyen et telle que les fluctuations autour de ce niveau moyen (variance) sont similaires Recherche des caractéristiques d’une région : On se donne un médaillon de départ (par exemple 10x10) ; on cherche si l’image est à peu près stationnaire dans ce médaillon par exemple en minimisant (modélisation par un plan) est ce que les coefficients a et b sont assez petits (plan assez horizontal) ? (si ce n’est pas le cas f(x,y) n’a pas une moyenne constante sur le médaillon et il faut démarrer la recherche de la région ailleurs)
![]()
71
En blanc : les pixels où le module du gradient est élevée à ne pas prendre en compte
dans la recherche des régions de niveau à peu près constant (sauf s’il s’agit de pixels isolés)
![]()
72
2. on calcule le niveau moyen (c) et la fluctuation autour de ce niveau moyen par exemple la variance (L est le côté du médaillon) ou l’écart type pixels bleus = écart faible dans le voisinage : on peut sans doute initialiser une recherche de région

73
3. on étend la région dans son voisinage (en faisant le tour du médaillon)
début de la spirale (écart type faible) 4. si sur les pixels du parcours l’écart à la valeur de référence (c) est inférieur à une fois et demi ou deux fois l’écart type, le pixel est intégré à la région (les caractéristiques de la région (moyenne et variance) peuvent être actualisées) evolution de l’écart sur la spirale 5. test d’arrête un tour complet sans rajouter de pixels à la région,
 4. si sur les pixels du parcours l’écart à la valeur de référence (c) est inférieur. à une fois et demi ou deux fois l’écart type, le pixel est intégré à la région. (les caractéristiques de la région (moyenne et variance) peuvent être actualisées) evolution de. l’écart sur. la spirale. 5. test d’arrête un tour complet sans rajouter de pixels à la région,")
74
regroupement éventuel de régions voisines dont les caractéristiques sont proches

75
cas particuliers : régions filiforme (par exemple routes dans une image
aérienne, veine ou nerf en biologie) comprises entre deux contours assez proches et parallèles souvent des difficultés liées à l’absence de continuité si on prolonge les régions dans la direction du contour, est ce que les pointillés se rejoignent , + approche par modélidation mathématique
 comprises entre deux contours assez proches et parallèles. souvent des difficultés liées à l’absence de continuité. si on prolonge les régions dans la direction du contour, est ce que. les pointillés se rejoignent , + approche par modélidation mathématique.")
76
suggestion : filtrage directionnel
sélectif de réponse impulsionnelle

77
quelles sont les paramètres
appropriés pour caractériser cette région ?

78
analyse spectrale des différentes régions (importance relative des
hautes et des basses fréquences, direction privilégiée, est ce que le spectre d’un nouveau médaillon ressemble plus à l’un des différents spectres « appris » pour chaque région ? est ce que le spectre du nouveau médaillon ressemble au spectre des médaillons voisins ? plus de basses fréquences plus de hautes fréquences

79
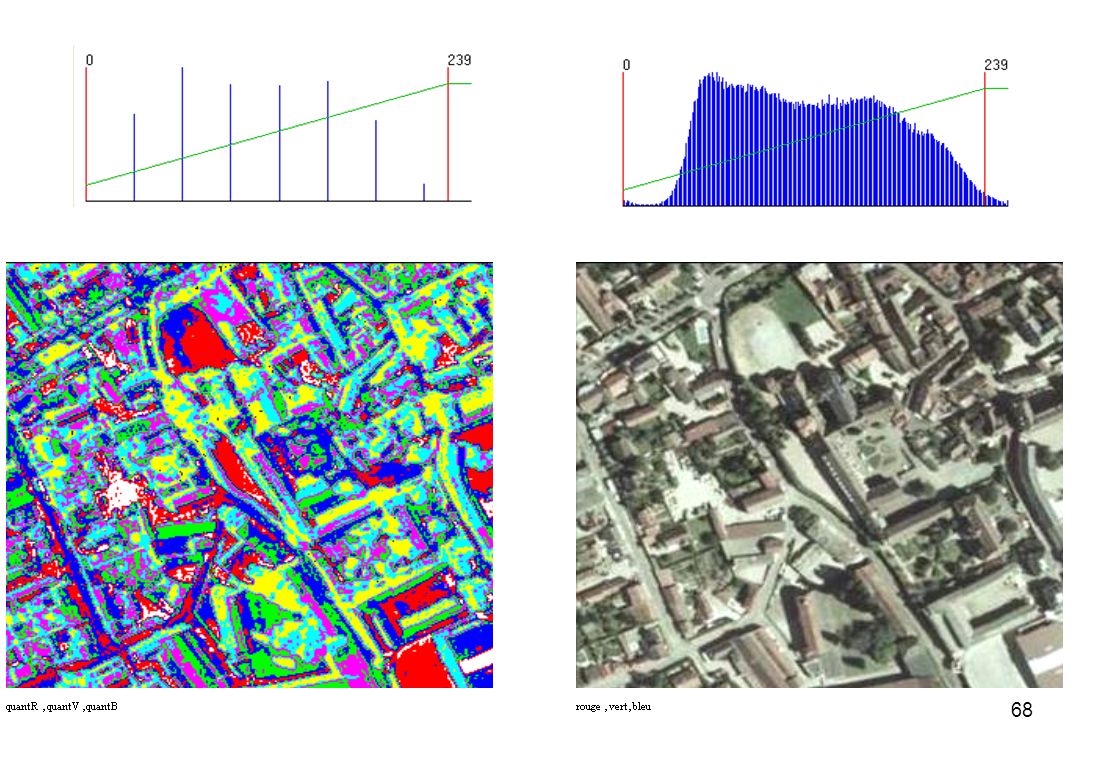
analyse en composantes principales des couleurs
aide à la présentation d’un nuage de points analyse en composantes principales des couleurs calcul de la matrice de covariance des composantes de l’image (après centrage pour avoir une moyenne nulle et en général normalisation des différentes composantes représentation dans le plan des valeurs propres les plus grandes de la matrice de covariance des images couleur afin de mieux voir les variations présentation(x,y) = a.rouge(x,y)+b.vert(x,y)+c.bleu(x,y) (a,b,c) vecteur propre associé à la plusgrande valeur propre de c
 = a.rouge(x,y)+b.vert(x,y)+c.bleu(x,y) (a,b,c) vecteur propre associé à la plusgrande valeur propre de c.")
80
analyse en composantes principales des couleurs
la combinaison linéaire ainsi trouvée est la présentation qui donne le plus grand contraste

81
de manière générale : une région est caractérisée par un certain nombre
de paramètres (les composantes d’un vecteur) qui fluctuent relativement peu dans le domaine de cette région mais qui se différencient (plus ou moins) nettement des vecteurs des paramètres caractérisant les régions avoisinantes un filtrage passe bas et un seuillage approprié peuvent suffire à donner une idée approximative des régions
 qui fluctuent relativement peu dans le domaine de cette région. mais qui se différencient (plus ou moins) nettement des vecteurs des paramètres. caractérisant les régions avoisinantes. un filtrage passe bas et un seuillage approprié peuvent suffire à. donner une idée approximative des régions.")
82
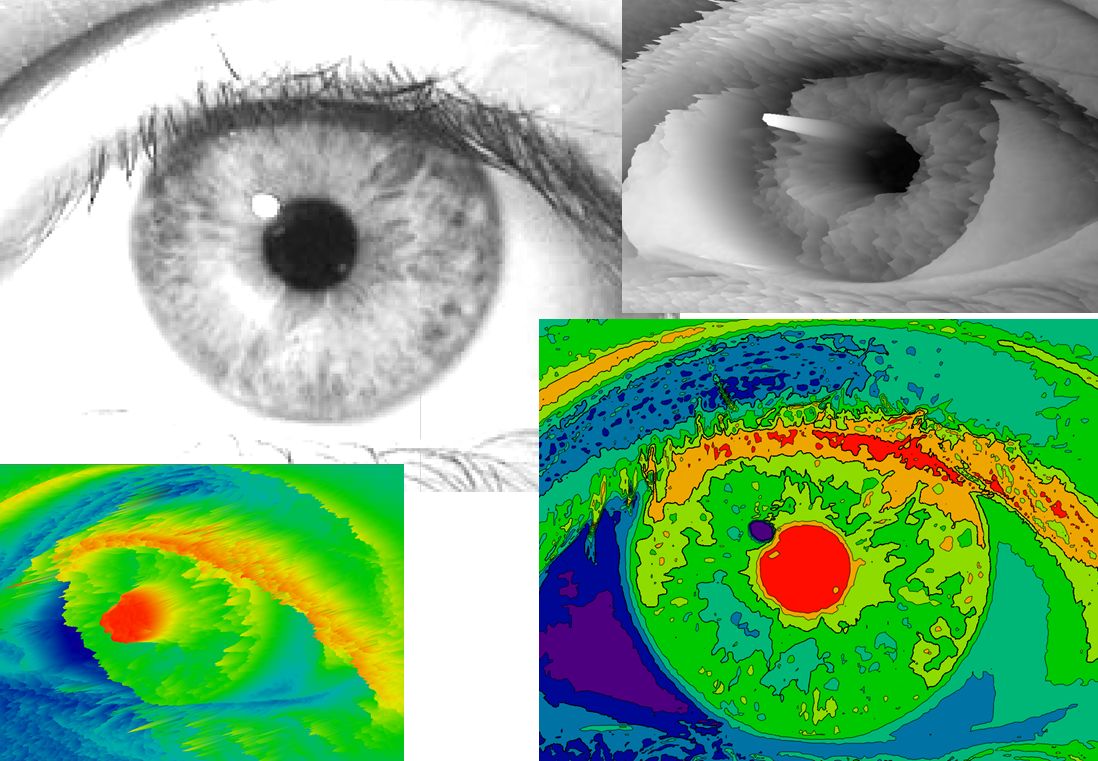
« l’œil » a tendance à regrouper les pixels en régions
du fait d’une interprétation intelligente sans doute très élaborée de la scène analysée ; tandis que les approches numériques classiques fondées sur des critères plus simples (statistiques locales) ne sont pas aussi performantes dans ce regroupement
![]()
83
quel est le problème à résoudre ?
est ce que la recherche de régions est une étape pertinente ? êtes vous en mesure de caractériser précisément les régions et de quantifier ces caractères ? quelles sont les marges d’incertitude ?

85
MORPHOLOGIE MATHEMATIQUE
- Retrouver la structure (« squelette ») d’une image éliminer des points isolés dans des régions grâce à des opérations de logique simple sur les pixels adjacents d’une région Jean Serra
 d’une image. éliminer des points isolés dans des régions. grâce à des opérations de logique simple. sur les pixels adjacents d’une région. Jean Serra.")
86
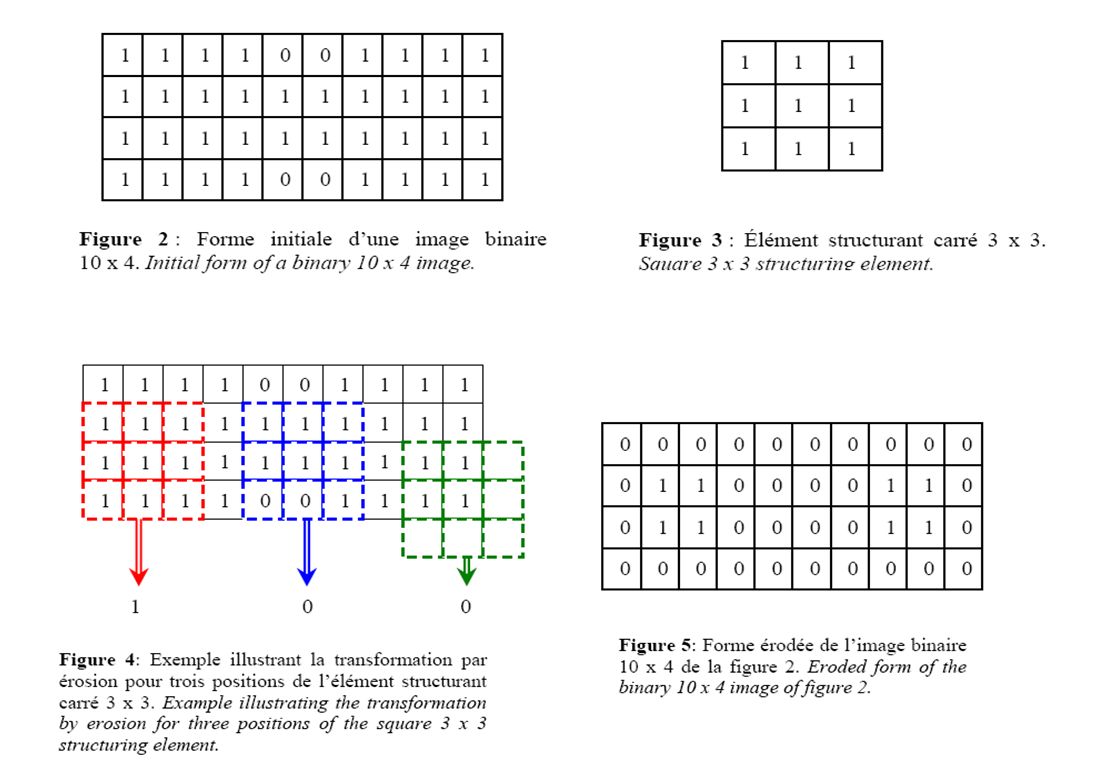
exemple d’application de la morphologie mathématique
Timothée KOMBE1 et René-Joly ASSAKO ASSAKO2 érosion dilatation amincissement épaississement squelettisation

88
dilatation + érosion → fermeture ; - érosion + dilatation → ouverture.
1 dilatation + érosion → fermeture ; - érosion + dilatation → ouverture. (4 – connexité) Le squelette (érosion interdisant la coupure) conserve les propriétés topologiques de la forme qu’il représente.
 Le squelette (érosion interdisant la coupure) conserve les propriétés topologiques de la forme qu’il représente.")
89
image binaire originale
dilatation érosion

90
ouverture original squelettisation fermeture

91
les contours actifs (‘‘snakes’’)
autre approche en vogue : les contours actifs (‘‘snakes’’) recherche d’une fonction assez lisse (souvent fermé) qui englobe une région où la description du contour par les gradient est insuffisante malgré le bruit de fond malgré la difficulté à caractériser le contour par le gradient
 recherche d’une fonction assez lisse (souvent fermé) qui englobe une région. où la description du contour par les gradient est insuffisante. malgré. le bruit. de fond. malgré la difficulté à caractériser. le contour par le gradient.")
92
exemple de champ de gradient dans une image (après filtrage passe bas)
comment trouver un trajet ‘lissé’ qui suive la crête (malgré les défauts) : approche par maximisation de critère (une chaîne de points relié entre eux)
 : approche par maximisation de critère. (une chaîne de points relié entre eux)")
93
Esnake = Einterne + Eexterne
on modifie la forme du contour actif pour minimiser une énergie qu’on décompose en deux parties Esnake = Einterne + Eexterne • Propriétés intrinsèques : Longueur, courbure… • Propriétés locales de l’image autour du contour actif : par exemple, fonction de l’intensité du gradient un point du contour actif est ‘‘retenu’’ par ses voisins il est attiré par une région proche de l’image où le gradient est fort gradient de l’énergie = ‘’force’’

94
forces (réduction de l’énergie) externes
rapprocher le point de la crête (en suivant le champ de gradient) forces (réduction de l’énergie) internes empêcher le point de s’éloigner de ses voisins dans la chaîne
 forces (réduction de l’énergie) internes. empêcher le point de s’éloigner de ses voisins dans la chaîne.")
95
a chaque étape, on modifie la position
des N points du contour actif (x1,y1), ..., (xN,yN) de manière à minimiser le critère qui s’écrit en fonction des coordonnées
, ..., (xN,yN) de manière à minimiser le critère. qui s’écrit en fonction des coordonnées.")
96
mais pénaliser la forte courbure
critères de modification itérative du contour actif : un compromis tendre vers les points où le gradient est élevé mais pénaliser la forte courbure et la longueur attention : réglages délicats !

97
analyse critique des approches contours / régions
beaucoup d’articles sur les performances d’algorithmes : on gagne un peu en performances mais il se peut qu’on n’arrive pas aux performances souhaitées pour résoudre le problème posé ; on peut donc se poser la question : qu’est ce qui est pertinent dans les recherches de contours et de régions ? cela dépend essentiellement de l’application envisagée et des performances qu’on attend de la méthode pas de méthodes ‘‘miracle’’, mais des compromis plus ou moins satisfaisants si la puissance de calcul le permet : utiliser des méthodes variées qui peuvent s’avérer complémentaires

98
remarque : il ne faut pas se contenter des performances sur des images de synthèse ou des images type ; les premières ne servent qu’à vérifier la validité de la programmation et les deuxièmes risquent d’encourager le développement d’algorithmes spécifiques adaptés aux images étudiées (p. ex la célèbre Lenna ...)
")
Présentations similaires






















 Nombres (1-100).>")