Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
L’étirement prolongé peut-il améliorer la proprioception et par suite le contrôle de l’équilibre ?
Pr Patrice ROUGIER Laboratoire de Modélisation des Activités Sportives Université de Savoie Le Bourget du lac Mel :

2
QUE REVELE NOTRE MORPHOLOGIE ?
Nous vivons dans un monde où s’appliquent différentes contraintes (gravitation, force de Coriolis), ce qui nous a conduit progressivement à développer des stratégies adaptées Notre morphologie révèle nos priorités : bien que notre position de référence soit la station debout, les articulations de notre squelette ne sont pas alignées verticalement Le centre de gravité se projette en avant des chevilles Ces stratégies ont avant tout pour but de nous permettre de nous déplacer plus ou moins rapidement
, ce qui nous a. conduit progressivement à développer des stratégies. adaptées. Notre morphologie révèle nos priorités : bien que notre. position de référence soit la station debout, les. articulations de notre squelette ne sont pas alignées. verticalement. Le centre de gravité se projette en avant des chevilles. Ces stratégies ont avant tout pour but de nous permettre. de nous déplacer plus ou moins rapidement.")
3
L’équilibre nécessite ici que les
centres de gravité partiels, G1, G2 et G3 des solides de poids m1g, m2g et m3g et les points de contact soient situés sur la même ligne de gravité (d’après Bouisset et Maton, 1995).
.")
4
QUELLE CONTRAINTE POUR NOTRE EQUILIBRE?
Des activités musculaires anti-gravitaires doivent être produites pour permettre le maintien postural Une des propriétés fondamentales du muscle squelettique est de ne pouvoir maintenir dans le temps une tension constante (De Luca et al., 1982) Le muscle squelettique peut donc être assimilé à un ressort à raideur inconstante L’homme debout peut donc être assimilé à un pendule inversé articulé au niveau des chevilles et maintenu en position par des haubans reliés à des ressorts de raideurs inconstantes
 Le muscle squelettique peut donc être assimilé à un. ressort à raideur inconstante. L’homme debout peut donc être assimilé à un pendule. inversé articulé au niveau des chevilles et maintenu. en position par des haubans reliés à des ressorts de. raideurs inconstantes.")
5
QUELQUES PRINCIPES BIOMECANIQUES
Le moment résultant des forces appliquées au centre de gravité ne peut être constant, ce qui entraîne de sa part des déplacements Les capacités d’équilibration d’individus sains ou pathologiques visent à contrôler les mouvements de leur centre de gravité - en modifiant les forces externes et internes qui s’appliquent au système - en modifiant les caractéristiques inertielles du système par une mobilisation segmentaire

6
Les résultantes des forces externes et internes s’appliquent sur le système respectivement au niveau : - du centre de gravité CG, barycentre des centres de masse segmentaires - du centre des pressions CP, point d’application de la force résultante de réaction Dans cette tâche, seules des forces exercées au niveau des appuis (CP) permettent au CG d’être déplacé. Dans tous les cas, il s ’agit de contrôler au mieux les déplacements du centre de gravité en agissant par une motricité précise sur les actions exercées au niveau des appuis
 permettent au CG d’être déplacé. Dans tous les cas, il s ’agit de contrôler au. mieux les déplacements du centre de gravité. en agissant par une motricité précise sur les. actions exercées au niveau des appuis.")
7
D’après Rougier et al. Kiné Scient (2001) 410: 6-13
 410: 6-13")
8
Relation spatio-temporelle entre CP et CG
5 mm CP CG D’après Rougier et Caron J Mot Behav (2000) 32:
 32:")
9
Le territoire décrit par la trajectoire du CP peut résulter de l’amplitude des mouvements de CGh et / ou de CP-CGv D’après Rougier. Clin Biomech (2003) 18:
 18:")
10
Estimation des mouvements de CGh et CP-CGv

11
Analyse classique Cette analyse sert d’abord à caractériser les positions moyennes des différentes trajectoires (CP planaires, CP résultant ou CG) et ainsi de connaître le degré d’asymétrie de distribution du poids ou le niveau d’inclinaison du corps La mesure des dispersions permet d’apprécier l’amplitude des mouvements Des paramètres tels que la surface de l’ellipse ou la longueur (ou la vitesse moyenne) permettent d’obtenir des indices globaux qu’il est nécessaire d’affiner par des outils complémentaires.
 et ainsi de connaître le degré d’asymétrie de distribution du poids ou le niveau d’inclinaison du corps. La mesure des dispersions permet d’apprécier l’amplitude des mouvements. Des paramètres tels que la surface de l’ellipse ou la longueur (ou la vitesse moyenne) permettent d’obtenir des indices globaux qu’il est nécessaire d’affiner par des outils complémentaires.")
12
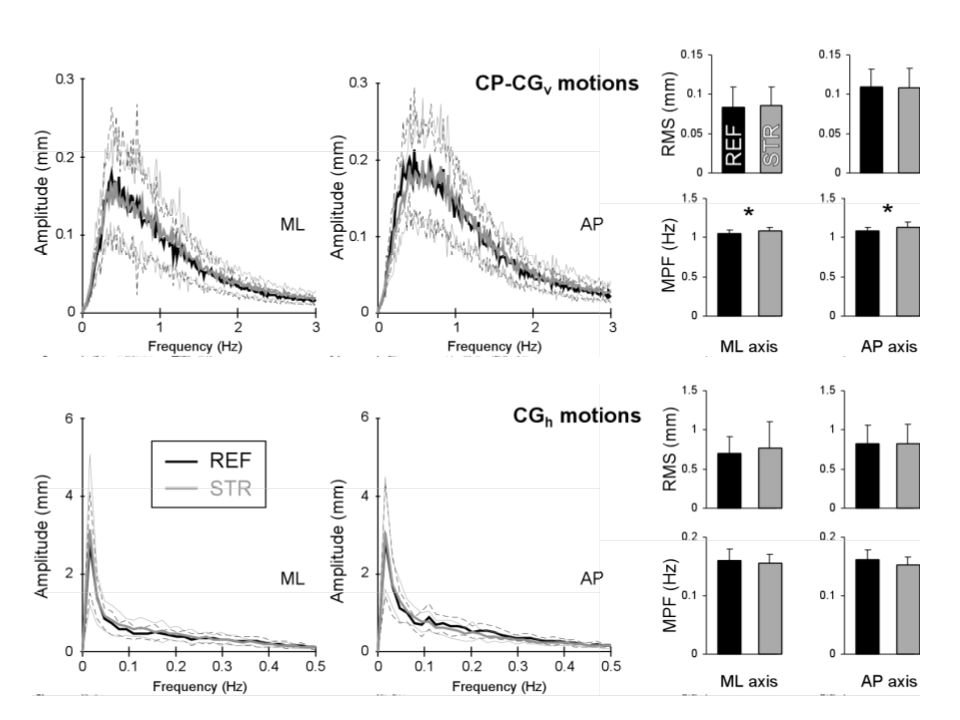
Analyse fréquentielle

13
Modélisation en mouvement Brownien fractionnaire
Ce modèle permet de préciser la nature plus ou moins contrôlée d’un signal Appliqué à une trajectoire du CP, ce modèle montre l’existence de deux mécanismes intervenant en succession: - un premier dont la plus forte probabilité est de s’éloigner des précédentes positions - un second dont la plus forte probabilité est de rebrousser chemin

14
Principe : selon les instants, la probabilité quant
au devenir de la trajectoire n’est pas identique

15
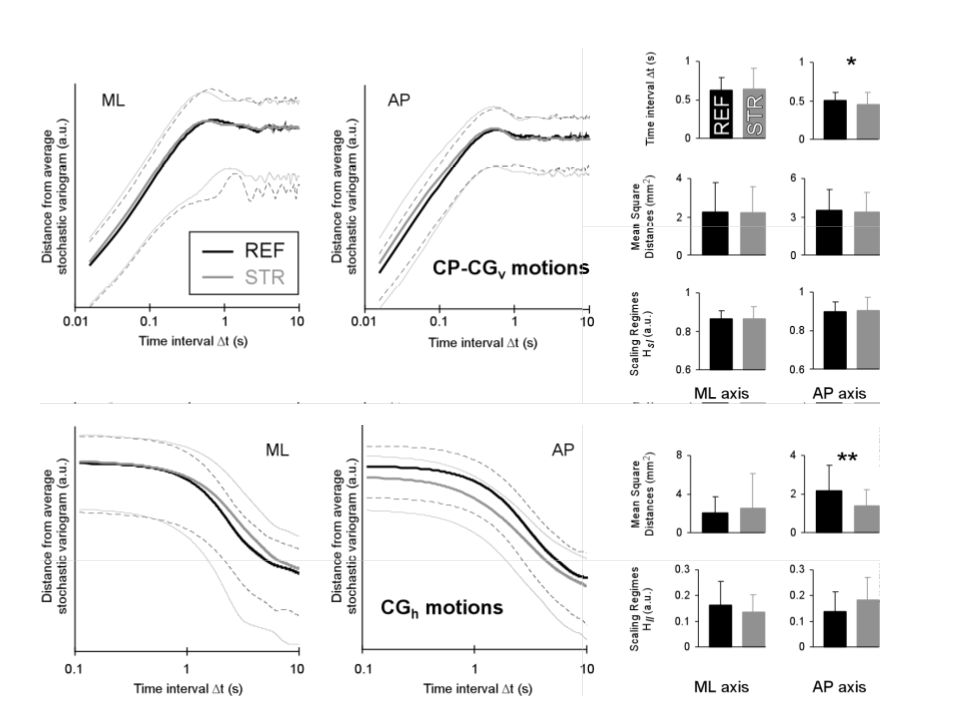
Méthode de calcul d’un variogramme
Le principe est de mesurer comment évoluent les distances moyennes parcourues élevées au carré <x2> en fonction d’intervalles de temps croissants t. Dans l’exemple donné, la <x2> pour le t le plus bref sera calculée sur la base des distances point à points de l’ensemble de la trajectoire (ici de 0 à 17). Pour un t double, seules les distances excluant une position seront prises en compte (tracés en traits fins gris), pour un t triple, seules les distances excluant deux positions successives seront pris en compte (tracés en traits tiretés fins noirs) et ainsi de suite. Ces calculs peuvent être effectués dans le plan mais il est en général plus intéressant d’étudier spécifiquement les déplacements projetés selon les axes ML et AP.
. Pour un t double, seules les distances excluant une position seront prises en compte (tracés en traits fins gris), pour un t triple, seules les distances excluant deux positions successives seront pris en compte (tracés en traits tiretés fins noirs) et ainsi de suite. Ces calculs peuvent être effectués dans le plan mais il est en général plus intéressant d’étudier spécifiquement les déplacements projetés selon les axes ML et AP.")
16
Détermination des coordonnées spatio-temporelles du point de transition et du niveau de contrôle des mécanismes

17
Le système somesthésique
Trois familles de récepteurs participent à cette modalité sensorielle: tactiles, musculaires et articulaires - Le contrôle de la musculature distale s’appuie préférentiellement sur les récepteurs musculaires (fuseaux neuro-musculaires et organes tendineux de Golgi) (Grigg 1994) - La capacité à voir leur réponse se modifier en fonction des évènements passés est mal connue - Leur sensibilité peut-elle être améliorée après une sollicitation (par étirement) prolongée?
 (Grigg 1994) - La capacité à voir leur réponse se modifier en fonction des évènements passés est mal connue. - Leur sensibilité peut-elle être améliorée après une sollicitation (par étirement) prolongée")
18
QUELLE MODALITE SENSORIELLE POUR NOTRE EQUILIBRE?
L’entrée visuelle, qui joue la plupart du temps un rôle majeur, peut être facilement éliminée L’entrée vestibulaire apparaît trop peu sensible pour être impliquée dans les mécanismes d’intégration L’entrée somesthésique peut donc être dans certaines conditions la seule source d’information L’homme debout ne mobilise qu’un nombre réduit de muscles pour contrôler son équilibre

19
PROTOCOLES Neuf hommes et six femmes, en bonne santé, ont participé à cette étude. La tâche consiste à se tenir debout, les yeux fermés, en minimisant les mouvements du corps. Les malléoles sont écartées de 3 cm avec un angle de 30° entre les bords internes des pieds 5 essais de 64s étaient enregistrés avant et après une série d’étirements des muscles triceps surae 10 étirements sur des durées de 30s étaient réalisés. Les enregistrements posturographiques reprenaient à partir du 6° étirement Pour le groupe contrôle, les étirements étaient remplacés par des stations debout de mêmes durées

20
D’après Rougier et al. Motor Control (2006) 10:
 10:")
21
RESULTATS Aucune différence statistiquement significative pour le groupe contrôle entre les deux conditions Une avancée de la position moyenne du CP selon l’axe AP Une légère augmentation de la raideur neuro-musculaire sur les 2 axes ML et AP Une diminution de la distance moyenne parcourue jusqu’à la correction sur AP

24
Conclusions L’effet principal réside dans une diminution du seuil spatial du point de transition selon l’axe AP - Seule la modélisation mBf permet de mettre en évidence cet effet - La sensibilité fusoriale « statique » serait donc améliorable par l’étirement musculaire répété - Ces résultats nécessitent d’être complétés par d’autres mesures

Présentations similaires