Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Cours 1 LE CONTRÔLE POSTURAL

2
Dans toute activité spatialement organisée, le contrôle postural constitue un pré-requis pour une motricité efficace. La fonction posturale est avant tout anti-gravitaire, en permettant le maintien de l’équilibre en cours de mouvement, le tonus postural étant le principal artisan. Cette fonction posturale sert aussi de cadre de référence dans l’organisation et l’exécution du mouvement. La position et l’orientation des segments corporels sont utilisés pour le calcul de la position du corps par rapport au monde extérieur ou encore du monde extérieur par rapport au corps.

3
Cette fonction de référence, assurée par le système nerveux central, implique non seulement la programmation du contrôle musculaire pour déclencher l’action mais aussi l’anticipation des conséquences de l’action telles que les effets mécaniques de celle-ci sur la géométrie du corps et sur l’équilibre. Ce sont les ajustements posturaux anticipés qui en précédant ou en coïncidant avec les perturbations liées au mouvement volontaire permettent de les minimiser voire de les annuler. Exécuter une habileté motrice, c’est produire la réponse optimale dans un contexte impliquant des contraintes internes et externes.

4
Les contraintes internes sont liées au corps lui-même: la configuration géométrique des segments entre eux, les caractéristiques inertielles des segments ou les forces musculaires. Les contraintes externes sont liées à l’environnement de l’action : la force gravitaire, les forces de réaction au sol ou la viscosité du milieu. Pour générer l’acte moteur le plus approprié, le SNC doit être capable de coordonner cette double contrainte. La commande centrale spécifie les paramètres du mouvement au travers de la commande musculaire, précisant l’interaction entre muscles agonistes et antagonistes ainsi que l’équilibre des forces et la séquence spatio-temporelle de leur action.

5
Le système moteur coordonne les mouvements à travers l’activité de différents réseaux qui transmettent la commande centrale et les signaux périphériques aux Mns. Dans une tâche complexe de mouvement volontaire plusieurs composantes peuvent être distinguées : maintenir l’équilibre, stabiliser certains segments corporels, déplacer le segment jusqu’à une certaine position, conserver le regard fixé sur une cible… Le SNC doit coordonner toutes ces exigences qui, dans certains cas, peuvent s’avérer contradictoires. Une première approche consiste à identifier toutes les composantes de l’acte moteur et à définir lesquelles sont contrôlées, quand et comment elles le sont.

6
Une des contraintes principales pendant le mouvement volontaire est le contrôle de l’équilibre.
En condition statique, l’équilibre est préservé dès lors que la projection verticale du centre de gravité (CGv) est maintenue à l’intérieur du polygone de sustentation, c’est à dire la surface d’appui au sol. Le mouvement volontaire est une source potentielle de perturbation de l’équilibre en ce sens qu’il modifie la géométrie du corps et par là même la position du CG et de ce fait modifie les conditions d’équilibre.
 est maintenue à l’intérieur du polygone de sustentation, c’est à dire la surface d’appui au sol. Le mouvement volontaire est une source potentielle de perturbation de l’équilibre en ce sens qu’il modifie la géométrie du corps et par là même la position du CG et de ce fait modifie les conditions d’équilibre.")
7
I - VALEUR DE REFERENCE ET CONTROLE DE L’EQUILIBRE
Les valeurs de référence devant être stabilisées pendant la réalisation du mouvement sont d’une extrême importance dans la mesure où elles vont servir de base dans l’organisation des ajustements posturaux. La valeur de référence à réguler pour assurer le contrôle de l’équilibre apparaît controversé. Pour Lacquaniti et al. (1990), chez le chat, la variable principalement contrôlée est la géométrie des segments corporels. L’ajout pendant plusieurs semaines d’une masse de 25% du poids de l’animal (collier) déplace durablement le CG de l’animal vers l’avant.
, chez le chat, la variable principalement contrôlée est la géométrie des segments corporels. L’ajout pendant plusieurs semaines d’une masse de 25% du poids de l’animal (collier) déplace durablement le CG de l’animal vers l’avant.")
8
La position du CG par rapport au sol serait par conséquent déterminée secondairement du fait de la géométrie du corps. A l’inverse, la diminution de la distance entre les appuis n’occasionne pas de flexion dorsale de l’axe vertébral. C’est par conséquent plutôt la stabilisation de l’axe du tronc qui serait avant tout recherchée. En définitive, il semble que le mode de contrôle dépendrait davantage de l’espèce considérée et de ses conditions d’appui. Chez l’homme, où la surface de sustentation est réduite, le déplacement segmentaire est accompagné automatiquement du déplacement en direction opposée d’un ou plusieurs autres segments, ceci pour limiter le déplacement du CG.

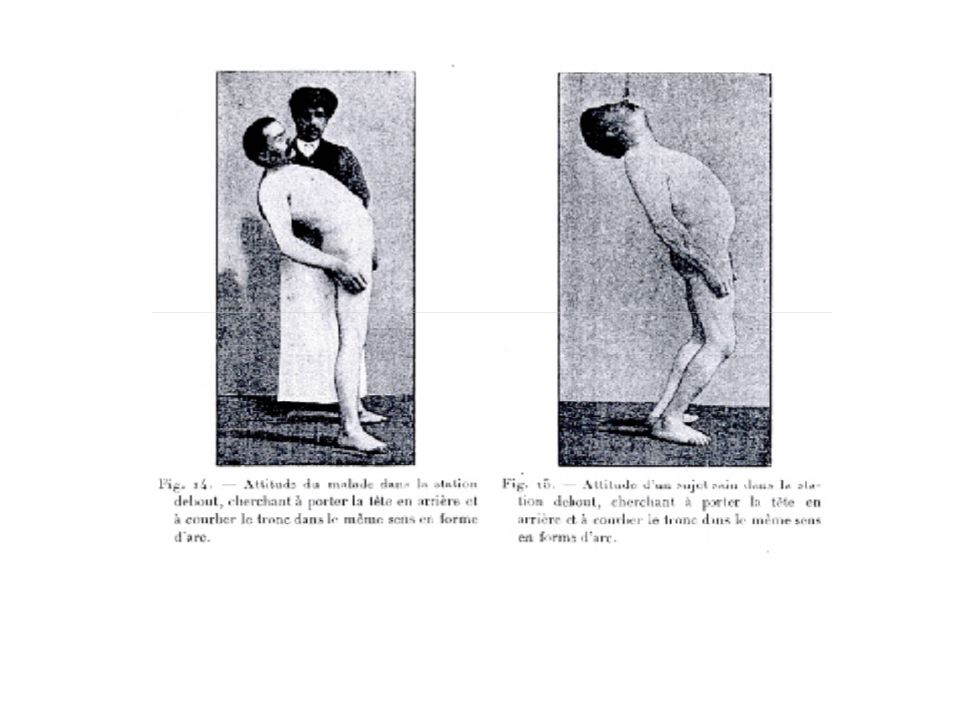
9
C’est ainsi que l’inclinaison vers l’arrière ou vers l’avant du tronc s’accompagne d’un déplacement en sens opposé du bassin (Babinski, 1899), que l’élévation du bras vers l’avant s’accompagne d’un déplacement vers l’arrière du tronc (Belenkii et al., 1967) ou enfin, que l’élévation latérale de la jambe s’accompagne d’un déplacement latéral du bassin et du tronc (Mouchnino et al., 1992). Il n’existe donc pas de régulation primaire de la géométrie du corps mais bien, par des changements de la géométrie, une régulation du CG. Chez le quadrupède, où le polygône de sustentation est beaucoup plus large, la position du CG apparaît secondaire par rapport à celui de la géométrie du corps.

11
Un autre exemple provient des stratégies observées en microgravité
Un autre exemple provient des stratégies observées en microgravité. Les ajustements posturaux perdurent alors que la projection du CG dans la surface de sustentation n’est plus nécessaire.

12
La stabilisation de la projection au sol du CG est réalisée par l’intermédiaire de signaux détecteurs d’erreurs sur la base d’informations afférentes d’origines visuelle, labyrinthique et kinesthésiques. Le rôle de ces informations a pu être mis en évidence à partir de la stimulation artificielle de ces récepteurs, les messages d’erreur ainsi générés étant pris en compte par la commande centrale pour corriger la posture afin d’annuler le message d’erreur.

13
II - SIGNAUX DETECTEURS D’ERREURS
Comme l’explique Massion (1997), le maintien de la position d’un segment suppose l’existence de 2 éléments : - une valeur de référence par rapport à laquelle le maintien se réalise - un mécanisme de contrôle qui permet la stabilisation proprement dite L’hypothèse initiale, considérant le contrôle de la station debout chez l’homme réalisé par la tension élastique passive des tissus non contractiles, est donc désormais abandonnée.
, le maintien de la position d’un segment suppose l’existence de 2 éléments : - une valeur de référence par rapport à laquelle le maintien se réalise. - un mécanisme de contrôle qui permet la stabilisation proprement dite. L’hypothèse initiale, considérant le contrôle de la station debout chez l’homme réalisé par la tension élastique passive des tissus non contractiles, est donc désormais abandonnée.")
14
Une des particularités est que le poids de ces entrées varie en fonction de la nature de la tâche mais aussi de la spécificité et du vécu sensoriel des sujets. L’organisme est généralement informé d’un déséquilibre à partir de plusieurs familles de récepteurs ou d’entrées Entrée visuelle Le mouvement, qu’il soit actif ou passif, produit dans tous les cas des effets visuels correspondant au déplacement de l’image perçue sur la rétine. Il est reconnu depuis longtemps que les informations visuelles jouent un rôle primordial dans l’orientation et l’équilibration posturale (Travis, 1945 ; Edwards, 1946).
.")
15
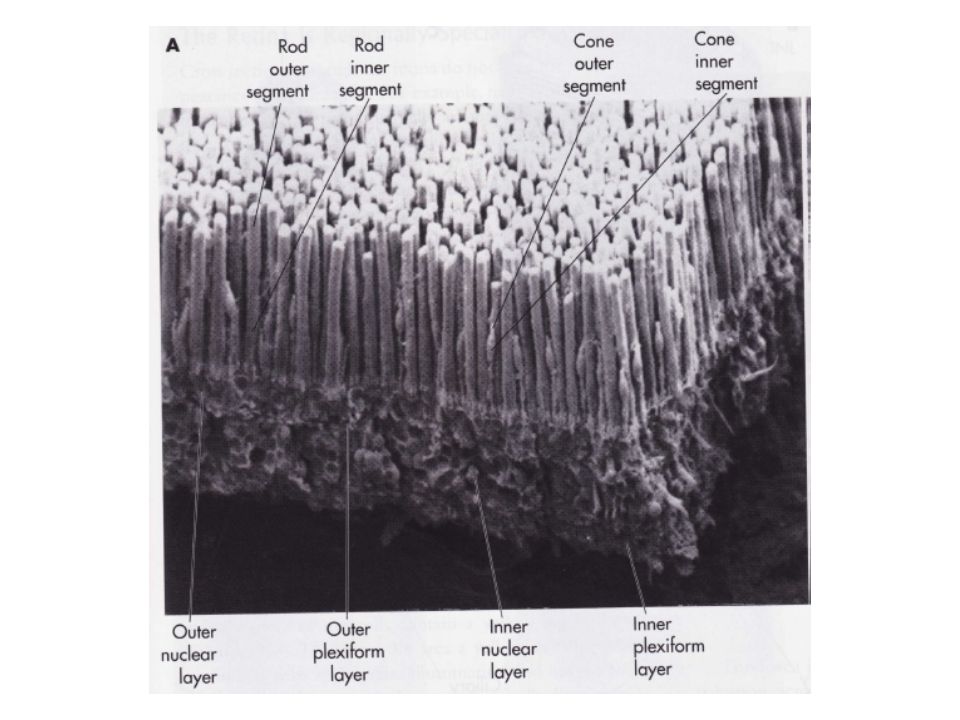
Certaines tâches posturales sont même impossibles à réaliser en l’absence de vision chez un sujet normal (Lee et Lishman, 1975). Grâce à diverses manipulations de cette entrée visuelle, il est possible d’établir quels types d’indices sont plus particulièrement impliqués dans le contrôle postural. Plusieurs différences anatomiques et physiologiques du récepteur rétinien existent: On distingue en effet sur celle-ci une zone, située dans la partie centrale, présentant la particularité d’être dépourvue d’éléments nerveux, c’est la fovéa ou rétine centrale (par opposition à la rétine périphérique).
.")
17
La rétine centrale semble fournir avant tout des informations détaillées sur la forme des objets fixes et sur leur mouvement relatif à l’environnement. La vision périphérique fonctionnerait en interaction étroite avec le système vestibulaire pour donner de l’information sur les mouvements céphaliques et les mouvements du corps relatifs à l’environnement. Diverses études (Amblard et Crémieux, 1976, Paulus et al., 1984) ont montré que le contrôle orthostatique était essentiellement contrôlé par la vision périphérique à partir d’indices statiques (vision de position et/ou orientation) et dynamiques (vision du mouvement).
 ont montré que le contrôle orthostatique était essentiellement contrôlé par la vision périphérique à partir d’indices statiques (vision de position et/ou orientation) et dynamiques (vision du mouvement).")
18
Le rôle prépondérant de la vision sur les autres entrées neurosensorielles a été montré à diverses reprises. Paulus et al. (1987), sur un sujet vestibulo-lésé soumis à un éclairage stroboscopique de fréquence variable, ont remarqué que ce dernier, ayant perdu le sens de la position au niveau des pieds, était incapable de rester debout en l’absence d’indices dynamiques. Plusieurs travaux font état d’une variabilité de la dépendance aux informations visuelles en fonction de l’âge (Assaiante et Amblard, 1995) du sexe et d’une pratique sportive régulière (Crémieux et al., 1995). D’autres paramètres se révèlent déterminants dans le contrôle postural orthostatique.
, sur un sujet vestibulo-lésé soumis à un éclairage stroboscopique de fréquence variable, ont remarqué que ce dernier, ayant perdu le sens de la position au niveau des pieds, était incapable de rester debout en l’absence d’indices dynamiques. Plusieurs travaux font état d’une variabilité de la dépendance aux informations visuelles en fonction de l’âge (Assaiante et Amblard, 1995) du sexe et d’une pratique sportive régulière (Crémieux et al., 1995). D’autres paramètres se révèlent déterminants dans le contrôle postural orthostatique.")
19
La distance : Bles et al. (1980) puis Paulus et al
La distance : Bles et al. (1980) puis Paulus et al. (1984) ont montré qu’un paysage visuel distant de plus de 5 mètres ne permettait plus la prise en compte de suffisamment d’indices visuels de mouvements pour stabiliser la posture. L’acuité visuelle: Paulus et al. (1984) rapportent qu’une diminution logarithmique de cette dernière détermine une augmentation linéaire de l’instabilité posturale, l’effet étant plus marqué d’avant en arrière que latéralement. La proprioception liée à la motricité oculaire représente également un élément déterminant dans cette tâche.
 puis Paulus et al. (1984) ont montré qu’un paysage visuel distant de plus de 5 mètres ne permettait plus la prise en compte de suffisamment d’indices visuels de mouvements pour stabiliser la posture. L’acuité visuelle: Paulus et al. (1984) rapportent qu’une diminution logarithmique de cette dernière détermine une augmentation linéaire de l’instabilité posturale, l’effet étant plus marqué d’avant en arrière que latéralement. La proprioception liée à la motricité oculaire représente également un élément déterminant dans cette tâche.")
20
Les effets sur le contrôle postural peuvent être mis en évidence par des stimuli vibratoires qui ont le pouvoir, comme sur tout muscle squelettique, de communiquer des informations afférentes déformées qui à leur tour déterminent des corrections posturales inappropriées (Roll et Roll, 1988).
.")
22
Les mouvements de saccades oculaires ou de clignement peuvent également induire des effets sur le contrôle de la posture. D’après Rougier et Garin, 2007

23
La privation de vision entraîne rapidement une modification des stratégies d’équilibration: D’après Rougier (2003) Une cécité prolongée entraîne également une réorganisation: les non-voyants congénitaux sont plus stables que les voyants fermant les yeux. D’après Rougier et Farenc, 2000

24
Le rôle des paupières : Les stratégies diffèrent selon que les paupières sont ouverte ou fermées. D’après Rougier, 2003. Ces différences disparaissent chez les mal voyants et les non-voyants de longue date (Olin et Rougier, 2009)
")
25
Entrée vestibulaire Les récepteurs vestibulaires sont situés à l’intérieur du labyrinthe de l’oreille interne et sont composés de deux structures : l’utricule-saccule et les canaux semi-circulaires. Dans les premiers se trouvent les otolithes, des petites particules pesantes qui permettent de détecter l’accélération gravitaire Quelles que soient les conditions, statiques ou dynamiques, ces récepteurs jouent un rôle déterminant dans l’équilibration.

26
Le saccule signale les mouvements verticaux alors que l’utricule signale les mouvements horizontaux.
le système des canaux semi-circulaires est sensible aux accélérations angulaires

27
La détection de l’information relative à l’accélération s’effectue par l’intermédiaire de cellules sensorielles ciliées qui, dans des conditions de repos, présentent une activité tonique soutenue Sous l’effet des accélérations, ces mécanorécepteurs subissent une inclinaison du fait de la masse inertielle endolymphatique. Cette inclinaison détermine une augmentation ou une diminution de cette fréquence selon la direction de l’accélération. Le maintien de l’accélération ne détermine pas de phénomène d’adaptation.

28
Détermination du seuil perceptif :
Certains auteurs contestent la capacité du système vestibulaire à informer sur l’orientation verticale du corps en l’absence de mouvement. Birren (1945) puis Walsh (1973) estiment qu’aucun des deux systèmes n’est suffisamment sensible pour intervenir dans le contrôle de la posture orthostatique Des seuils de 5 cm.s-2 pour les accélérations linéaires et de 0,15°.s-2 pour les accélérations angulaires sont données par la littérature. Winter et al. (1998) ont calculé les accélérations céphaliques : 1,6 à 1,8 cm.s-2 pour l’axe AP et de 1,0 à 1,2 cm.s-2 pour ML, confirmant ainsi leur rôle négligeable supposé.
 puis Walsh (1973) estiment qu’aucun des deux systèmes n’est suffisamment sensible pour intervenir dans le contrôle de la posture orthostatique. Des seuils de 5 cm.s-2 pour les accélérations linéaires et de 0,15°.s-2 pour les accélérations angulaires sont données par la littérature. Winter et al. (1998) ont calculé les accélérations céphaliques : 1,6 à 1,8 cm.s-2 pour l’axe AP et de 1,0 à 1,2 cm.s-2 pour ML, confirmant ainsi leur rôle négligeable supposé.")
29
Les dysfonctionnements observés chez les patients vestibulo-lésés sont d’avantage liés à des déficits intégrateurs (troubles si YF) Entrée tactile Les sensations tactiles résultent d’une stimulation de récepteurs cutanés. On distingue généralement un toucher grossier (perception de quelque chose mais dont l’emplacement, la forme ou la texture sont difficilement déterminables) et un toucher discriminant (localisation précise de la zone touchée). Plusieurs récepteurs sont en fait incriminés dans ces sensations.
 et un toucher discriminant (localisation précise de la zone touchée). Plusieurs récepteurs sont en fait incriminés dans ces sensations.")
31
Une division en deux groupes peut être effectuée: ceux qui s'adaptent lentement (réponse constante à un stimulus constant) et ceux qui s'adaptent rapidement (réponse uniquement à la mise en jeu de la stimulation, voire à son retrait). La peau glabre possède deux types de mécanorécepteurs à AR: les corpuscules de Meissner (superficiel) et de Pacini (profond). … et deux types de mécanorécepteurs à adaptation lente, le récepteur de Merkel (superficiel) et le corpuscule de Ruffini (profond). Les récepteurs de Merkel et les corpuscules de Meissner (superficiels) se caractérisent par les champs récepteurs les plus petits et possèdent donc une meilleure résolution spatiale que les profonds.
 et de Pacini (profond). … et deux types de mécanorécepteurs à adaptation lente, le récepteur de Merkel (superficiel) et le corpuscule de Ruffini (profond). Les récepteurs de Merkel et les corpuscules de Meissner (superficiels) se caractérisent par les champs récepteurs les plus petits et possèdent donc une meilleure résolution spatiale que les profonds.")
32
Bien que moins dense qu’au niveau de la main, diverses expérimentations basées sur une anesthésie des soles plantaires par le froid (Asaï et al., 1990 ; Magnusson et al ., 1990) suggèrent que les afférentes cutanées plantaires puissent jouer un rôle non négligeable dans le maintien de la posture orthostatique. Inversement, leur stimulation mécanique peut induire une capacité d’équilibration accrue

33
D’après Bernard-Demanze et al., 2004)
")
34
Lors d’une co-stimulation, l’effet résultant est fonction de la différence des fréquences des vibrations appliquées. D’après Kavounoudias et al., 1999 Une stimulation vibratoire sous les pieds peut aussi induire des effets posturaux. D’après Kavounoudias et al., 2001

35
Entrée proprioceptive
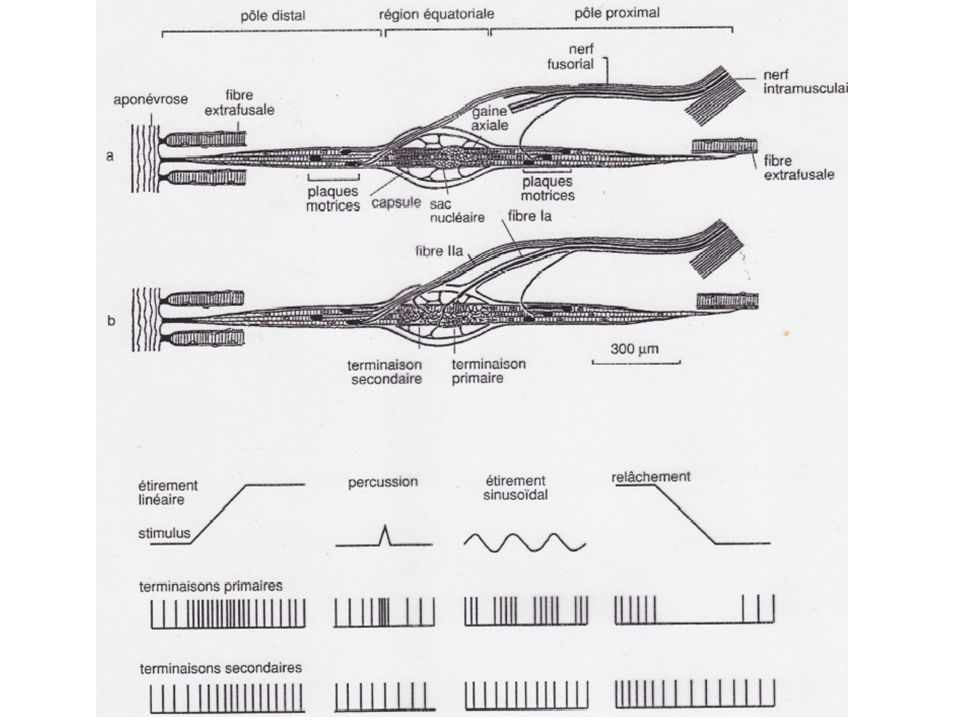
La connaissance de la position du corps dans l’espace suppose, outre l’intégration d’un schéma corporel égocentré par le biais des entrées visuelle et proprioceptive, celui d’un référentiel exocentrique. Ceci est réalisé par l’appareil ostéo-musculo-cutané qui informe en permanence le SNC sur son état fonctionnel par des messages afférents des muscles, des tendons, des ligaments, des capsules articulaires et du derme. Les récepteurs du muscle squelettique sont les fuseaux neuro-musculaires. Ce sont eux qui permettent le maintien de l’activité tonique par voie réflexe.

36
Ils sont en fait constitués de fibres différenciées ou intrafusales, disposées parallèlement aux fibres extrafusales. Deux catégories sont mises en évidence : des fibres « dynamiques » à sac et des fibres « statiques » et « dynamiques » à chaîne. Deux types de terminaisons sont répertoriés : les terminaisons annulo-spiralées ou primaires (Ia), qui sont sensibles à la fois à la longueur musculaire et à la vitesse d’allongement, et les terminaisons secondaires (II), qui codent avant tout la longueur musculaire et dans une mesure plus faible la vitesse. Ces récepteurs reçoivent aussi une innervation motrice, composée des fibres efférentes g et b, ces dernières assurant une innervation mixte intra et extrafusale.
, qui sont sensibles à la fois à la longueur musculaire et à la vitesse d’allongement, et les terminaisons secondaires (II), qui codent avant tout la longueur musculaire et dans une mesure plus faible la vitesse. Ces récepteurs reçoivent aussi une innervation motrice, composée des fibres efférentes g et b, ces dernières assurant une innervation mixte intra et extrafusale.")
38
Les organes tendineux de Golgi, situés à la jonction entre les fibres musculaires et les tendons, sont sensibles à la tension exercée par un allongement passif ou une contraction active des fibres musculaires. Leur action principale consiste en une influence inhibitrice sur les Mns. Les informations Ib, outre leur implication dans la mise en place du réflexe myotatique inverse (inhibition des Mns du muscle homonyme), permettent d’estimer le niveau de force résultant de la contraction musculaire. Outre cette sensibilité statique, une sensibilité dynamique, plus faible que celles des fuseaux, est aussi observée. Ces récepteurs pourraient donc participer à la détection de la position du CG.
, permettent d’estimer le niveau de force résultant de la contraction musculaire. Outre cette sensibilité statique, une sensibilité dynamique, plus faible que celles des fuseaux, est aussi observée. Ces récepteurs pourraient donc participer à la détection de la position du CG.")
39
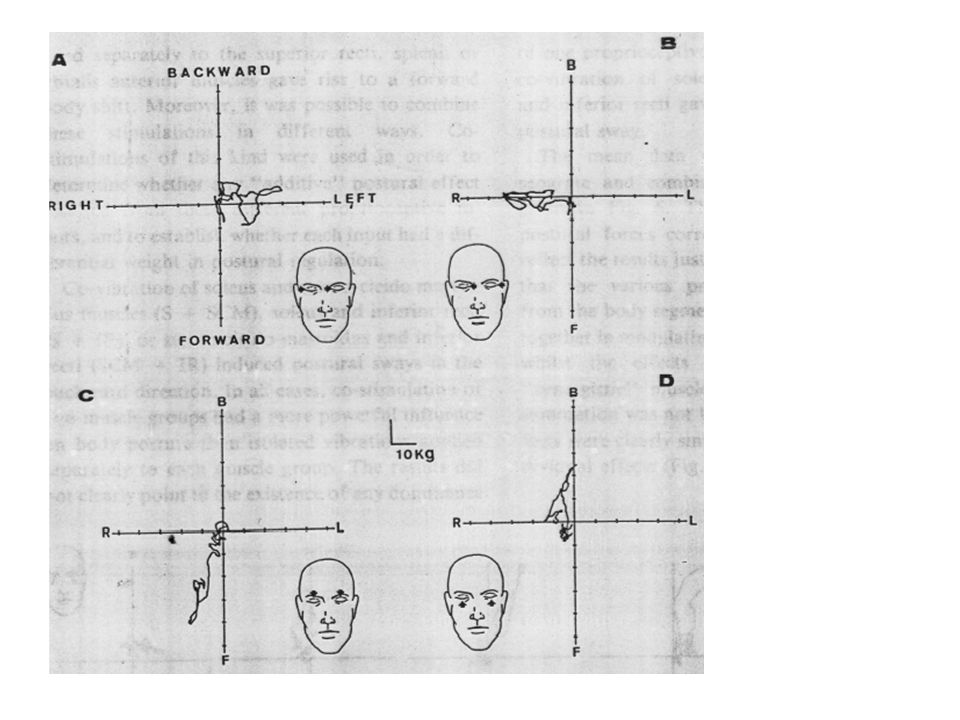
Les effets proprioceptifs peuvent être montrés par des stimulations vibratoires au niveau des muscles de la nuque. D’après Calvin-Figuière et al., 2000 Ces effets sont en tous points comparables dès lors que des muscles du même plan sont stimulés. D’après Calvin-Figuière et al., 2000

40
Une autre façon de procéder pour mettre en avant le rôle de la proprioception est la stimulation labyrinthique bilatérale. D’après Lund et Broberg et al., 1983

41
Les récepteurs articulaires:
Les corpuscules de Ruffini possèdent une sensibilité à la fois statique et dynamique et ne sont en général actifs qu’autour des positions extrêmes de l’articulation. Les corpuscules de Pacini sont sensibles aux déformations mécaniques et ne sont activés que pour des mouvements rapides. Les récepteurs de Golgi, situés au niveau des ligaments articulaires, sont sensibles aux tensions ligamentaires. La perception angulaire serait due avant tout aux récepteurs musculaires, les afférences des récepteurs articulaires ne jouant un rôle que dans les positions extrêmes.

42
La perception de la verticalité :
Dépendance au champs visuel: Il s’agit d’une notion introduite par Witkin et Asch (1948) Ce concept définit une prédilection dans l’utilisation des informations visuelles au détriment des autres informations sensorielles dans la perception de la verticale gravitaire. Ainsi lorsqu’un individu dépendant est confronté à une absence de repère visuel, il rencontre des difficultés à s’orienter par rapport à la verticale gravitaire. Le test du cadre et du bâton (Rod Frame Test; Witkin, 1949):
 Ce concept définit une prédilection dans l’utilisation des informations visuelles au détriment des autres informations sensorielles dans la perception de la verticale gravitaire. Ainsi lorsqu’un individu dépendant est confronté à une absence de repère visuel, il rencontre des difficultés à s’orienter par rapport à la verticale gravitaire. Le test du cadre et du bâton (Rod Frame Test; Witkin, 1949):")
43
Le sujet doit replacer à la verticale une baguette lumineuse inclinée dans un cadre lui-même incliné. Ce dispositif crée un conflit entre les informations visuelles qui indiquent une inclinaison et les informations posturales qui indiquent une position droite de l’individu. Les sujets dépendants (DC) ont tendance à aligner la baguette sur le cadre alors que les indépendants (IC) ont tendance à aligner la baguette sur la verticale gravitaire.
 ont tendance à aligner la baguette sur le cadre alors que les indépendants (IC) ont tendance à aligner la baguette sur la verticale gravitaire.")
44
Certains facteurs peuvent influencer le niveau de dépendance comme l’âge (Witkin et al., 1967) ou le sexe (Witkin, 1950), avec une dépendance accrue des femmes. La pratique sportive semble également influencer négativement le niveau de dépendance, ceci s’expliquant par un apprentissage des athlètes à utiliser les informations proprioceptives (Brady, 1995). La question de l’élargissement de ce concept au contrôle de l’équilibre se pose naturellement.
. La question de l’élargissement de ce concept au contrôle de l’équilibre se pose naturellement.")
45
Les individus indépendants sont en général plus stables lors du contrôle de leur équilibre que les sujets dépendants (Isableu et al., 1997) Des applications cliniques en station assise peuvent également être envisagées (Perennou et al., 2008)
")
46
Conflits sensoriels Le rôle prépondérant des informations visuelles a été mis en évidence par des protocoles neutralisant ses effets par un déplacement de l’environnement couplé avec celui du corps (Forssberg et Nashner, 1982) ou encore en communiquant aux sujets des informations erronées par chambre mobile (Lee et Aronson, 1974). Ce rôle majeur de la vision chez l’adulte serait une réminiscence de la prévalence visuelle observée pendant l’enfance (Forssberg et Nashner, 1982) . Seules les informations visuelles demeurent invariantes durant cette période. Les informations proprioceptives, dépendantes des modifications morphologiques liées à la croissance, nécessitent une recalibration permanente.
 ou encore en communiquant aux sujets des informations erronées par chambre mobile (Lee et Aronson, 1974). Ce rôle majeur de la vision chez l’adulte serait une réminiscence de la prévalence visuelle observée pendant l’enfance (Forssberg et Nashner, 1982) . Seules les informations visuelles demeurent invariantes durant cette période. Les informations proprioceptives, dépendantes des modifications morphologiques liées à la croissance, nécessitent une recalibration permanente.")
47
III - SYSTEME DE REFERENCE UTILISE POUR LE CALCUL D’UNE TRAJECTOIRE
Au cours d’un acte moteur, il est nécessaire de déplacer certains segments pour effectuer un mouvement de stabiliser en même temps la position ou l’orientation d’autres segments pour servir de référentiel dans le calcul d’une trajectoire. Pendant le mouvement, la géométrie des segments est modifiée, ce qui a pour effet de déplacer la position du CG et donc d’induire un déséquilibre. De plus, les forces internes d’origine musculaire s’accompagnent de forces de réaction sur les segments d’appui, constituant une source de perturbation supplémentaire.

48
Il est donc nécessaire d’anticiper les conséquences du mouvement par la mise en place d’ajustements posturaux anticipés (APA). Leur but sera d’assurer la conservation de l’équilibre et de stabiliser certains segments corporels utilisés comme valeur de référence pour l’organisation du mouvement. Trois catégories de référentiels peuvent être décrites: - un référentiel géocentrique basé sur le vecteur gravitaire et les forces de réaction au sol. Il est essentiel dans la construction de la posture et de l’équilibre. - un référentiel égocentrique basé sur la position segmentaire. Il est important pour les mouvements visuellement guidés (transformation des coordonnées spatiales d’une cible en coordonnées corporelles pour l’organisation de la trajectoire).
.")
49
- Un référentiel exocentrique basé sur l’espace péripersonnel est utilisé comme valeur de référence et peut être basé sur des informations visuelles ou auditives. Le problème majeur qui se pose au cours d’un mouvement spatialement orienté vers une cible est celui de la transformation des coordonnées spatiales (extrinsèques) de la cible à atteindre en commande motrice appropriée pour l’exécution du mouvement. Il est nécessaire de calculer la position de la cible dans l’espace et de la situer par rapport au corps de connaître la position de la main par rapport au corps pour calculer la trajectoire du mouvement segmentaire.
 de la cible à atteindre en commande motrice appropriée pour l’exécution du mouvement. Il est nécessaire de calculer. la position de la cible dans l’espace et de la situer par rapport au corps. de connaître la position de la main par rapport au corps pour calculer la trajectoire du mouvement segmentaire.")
50
Pour calculer la position de la cible par rapport au corps, il faut transformer l’image rétinienne de la cible en coordonnées céphaliques puis en coordonnées par rapport à l’épaule et au tronc. La position initiale de la main est déterminée à partir d’informations visuelles et/ou kinesthésiques. Si la chaîne proprioceptive reliant l’œil et la tête au tronc est modifié (vibrations), ou absente (déafférentation des muscles du cou) une position illusoire de la cible est perçue. Lorsque les positions de la cible et de la main sont représentées dans le même champ de référence, le SNC doit résoudre le problème de la représentation de la trajectoire puis de sa transformation en activités musculaires.
, ou absente (déafférentation des muscles du cou) une position illusoire de la cible est perçue. Lorsque les positions de la cible et de la main sont représentées dans le même champ de référence, le SNC doit résoudre le problème de la représentation de la trajectoire puis de sa transformation en activités musculaires.")
51
Une fois la représentation de la trajectoire du mouvement établie, la tâche du SNC est de convertir la trajectoire planifiée de la main, définie par ses caractéristiques et par la vitesse avec laquelle la main est déplacée, en commande musculaire. Deux hypothèses sont proposées pour cette conversion: la dynamique inverse et le point d’équilibre. Dans la dynamique inverse, deux séries de calculs doivent être réalisées. Le premier (cinématique inverse) doit spécifier, à partir de la position finale désirée, les changements des angles articulaires devant intervenir pour produire la trajectoire.
 doit spécifier, à partir de la position finale désirée, les changements des angles articulaires devant intervenir pour produire la trajectoire.")
52
Le second consiste à calculer, à partir de la trajectoire du mouvement envisagée, les couples de forces nécessaires à la production du mouvement. Les effets dynamiques, dus à la production de couples de forces articulaires, aux activités musculaire et réflexe, seraient par conséquent asservis au but cinématique. Le rôle de la commande centrale est de transformer la trajectoire planifiée en une séquence de positions angulaires (cinématique inverse) et de raideur (dynamique inverse). Si le SNC développait une représentation optimale de la trajectoire de la main, la transformait en coordonnées articulaires puis déterminait l’activité musculaire appropriée, il n’y aurait aucune raison pour que la la trajectoire diffère de la ligne droite.
 et de raideur (dynamique inverse). Si le SNC développait une représentation optimale de la trajectoire de la main, la transformait en coordonnées articulaires puis déterminait l’activité musculaire appropriée, il n’y aurait aucune raison pour que la la trajectoire diffère de la ligne droite.")
53
Cela signifie que d’autres facteurs visiblement jouent un rôle dans ce contrôle.
Il s’agit de la prise en considération des forces de réactions (proportionnelles aux accélérations des articulations) et des forces centripètes (proportionnelles aux carrés des vitesses angulaires des articulations). Cette série de calcul nécessite une connaissance précise de la masse, du moment d’inertie, de la position du centre de masse et de la longueur de chaque segment. Cette méthode, trop complexe pour être réalisée en temps réel, nécessiterait un pré-calcul mémorisé de la trajectoire suivi d’un calcul réalisé en temps réel.
 et des forces centripètes (proportionnelles aux carrés des vitesses angulaires des articulations). Cette série de calcul nécessite une connaissance précise de la masse, du moment d’inertie, de la position du centre de masse et de la longueur de chaque segment. Cette méthode, trop complexe pour être réalisée en temps réel, nécessiterait un pré-calcul mémorisé de la trajectoire suivi d’un calcul réalisé en temps réel.")
54
Dans l’hypothèse des points d’équilibre, l’idée principale est que le SNC puisse contrôler la position d’un membre, et la posture en général, par la spécification d’un point d’équilibre. Dans cette théorie, le SNC spécifie une position angulaire d’équilibre à chaque articulation plutôt qu’un contrôle indépendant de chacun des muscles. Le muscle est considéré comme un ressort attaché à une masse qui est caractérisé par sa tension. Chaque position d’une articulation correspond à un état d’équilibre entre des forces résultant de la tension exercée par les muscles agonistes et antagonistes agissant sur cette articulation.

55
Il suffit donc de modifier le niveau de contraction de l’un des muscles qui contrôle l’articulation pour changer de position d’équilibre. Les mouvements seraient alors le résultat de changements des états d’équilibre du système moteur qui aboutiraient à une séquence de positions d’équilibre appelée trajectoire d’équilibre. Les forces nécessaires au mouvement sont par conséquent données par la différence instantanée entre le point d’équilibre virtuel et la position du membre et les propriétés visco-élastiques des muscles. Si le point d’équilibre est déplacé, le membre de déplacera vers ce nouveau point d’équilibre.

Présentations similaires