Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Plan Ordonnancement Obtention des tests de faisabilité entre processus
Analyse de l'interaction entre processus Inclusion de processus apériodiques

2
Vers une meilleure maîtrise du temps
Objectifs : Nous présentons les mécanismes spécifiques qui permettent de prévoir avec plus d'exactitude le comportement temporel d'un système. Nous étudions les méthodes d'ordonnancement temps réel.

3
Ordonnancement /définitions
C'est lors de l'ordonnancement que l'on choisit la tâche qui devient la tâche courante. Dans les systèmes temps réel, on espère collecter des informations a priori pour pouvoir prédire le comportement de l'application. C'est pourquoi des ordonnancements hors fonctionnement (off line) prennent les décisions avant l'exécution du système. Si cela est possible, on a recourt à des algorithmes en ligne (on line) qui prennent les décisions durant l'exécution du système.
 prennent les décisions avant l exécution du système. Si cela est possible, on a recourt à des algorithmes en ligne (on line) qui prennent les décisions durant l exécution du système.")
4
Ordonnancement hors-ligne
La séquence d'ordonnancement est donc pré-calculée avant l'exécution. A l'exécution, l'ordonnanceur est un simple séquenceur : on parle de cyclic scheduler Le séquenceur lit un tableau "modulo la longeur" : pas besoin d'exécutif multitâche La mise en œuvre est simple La surcharge est facilement détectable Rigidité du séquenceur est une limitation. 1 T1 2 3 Nop 4 T2 5 T3 6 7 t=19 (19mod7)=5
=5.")
5
Ordonnancement en ligne
L'ordonnanceur implante un algorithme permettant de savoir à tout instant quel tâche exécuter L'ordonnancement est un exécutif multitâche conduits par priorité Les politiques sont importantes et flexibles Un surcoût en temps et en ressource lors de la mise en œuvre Les surcharge sont difficile à détecter

6
Ordonnancement /définitions
Un algorithme est dit statique s'il sait déterminer a priori les ordonnancements possibles de son système. Un algorithme est dit dynamique si l'ordonnancement est déterminé lors de l'exécution. Il permet la prise en compte d'événements « non » prévus.

7
La faisabilité Des études ont été menées pour trouver des critères associés aux tâches pouvant conduire à une politique d'ordonnancement optimale dans certains cas. S'il existe un ordonnancement d'un ensemble de tâches qui respecte les contraintes temporelles associées à ces tâches, alors l'ensemble des tâches est dit faisable. Un ordonnancement optimal est un ordonnancement qui peut produire un ordonnancement pour tout ensemble faisable de tâches.

8
Critères liés aux tâches
Les tâches périodiques sont celles qui doivent être activées à intervalles réguliers. Les instants de début d'exécution peuvent varier d'une instance à l'autre. Capacité Deadline T : période

9
Exemple : Fluide 2 Fluide 1 Réacteur
20 l de fluide 1 versé toutes les 100 ms. 40 l de fluide 2 versé toutes les 150 ms. Sachant que pour verser un litre de fluide, il faut 1 ms. 100 ms pour une prise de température toutes les 350 ms. Fluide 2 Fluide 1 Réacteur

10
Modélisation du problème :
La gestion des 2 fluides et de la température est représentée par 3 tâches indépendants nommées P1, P2 et P3. Ces 3 tâches s’effectuent périodiquement avec des temps d’activation différents (resp. 100, 150 et 350). Et chacune exige un certain temps d’exécution ( resp. 20, 40 et 100).
. Et chacune exige un certain temps d’exécution ( resp. 20, 40 et 100).")
11
Exemple introductif : Réacteur Fluide 1 Fluide 2 T C P1 100 20
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

12
Exemple introductif : Fluide 1 T C P1 100 20 P2 150 40 P3 350 100
Réacteur P1 P2 P3 temps Alors allons-y !!!!! RM va procéder de la manière suivante:

13
Exemple introductif : Fluide 2 T C P1 100 20 P2 150 40 P3 350 100
Réacteur P1 P2 P3 temps Alors allons-y !!!!! RM va procéder de la manière suivante:

14
Exemple introductif : T C P1 100 20 P2 150 40 P3 350 100 Réacteur P1
Alors allons-y !!!!! RM va procéder de la manière suivante: temps

15
Exemple introductif : Fluide 1 T C P1 100 20 P2 150 40 P3 350 100
Réacteur P1 P2 P3 temps Alors allons-y !!!!! RM va procéder de la manière suivante:

16
Exemple introductif : Fluide 2 T C P1 100 20 P2 150 40 P3 350 100
Réacteur P1 P2 P3 temps Alors allons-y !!!!! RM va procéder de la manière suivante:

17
Exemple introductif : T C P1 100 20 P2 150 40 P3 350 100 Réacteur P1
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

18
! Exemple introductif : T C P1 100 20 P2 150 40 P3 350 100 P1 P2 P3
Alors allons-y !!!!! RM va procéder de la manière suivante: temps

19
Critères liés aux tâches
Les tâches sporadiques ne sont pas activées de façon régulière, mais on peut définir un temps minimal d'apparition entre deux activations d'instances successives. Elles ont des contraintes de temps fortes. Les tâches apériodiques sont activées également à des instants irréguliers mais avec des échéances plus lâches et sans temps minimal entre deux activations. Capacité Deadline A A + ?

20
Les algorithmes Les algorithmes d'ordonnancement
statiques pilotés par tables statiques préemptifs sur les priorités dynamiques basés sur une planification à l'exécution dynamiques basés sur la notion de meilleurs efforts

21
Les ordonnancements cycliques
On cherche à découper a priori une application en séquences élémentaires qui ne seront jamais interrompues. Le modèle d'application est le suivant Une séquence est une procédure définie par l'utilisateur Un processus est une suite ordonnée de séquences ; qui s'exécutent consécutivement, dans l'ordre de la déclaration. L'ordonnancement des processus est régi par un calendrier, c'est une table spécifiant la liste des processus à activer ; elle est de longueur arbitraire et exploitée cycliquement. Le découpage en séquences élémentaires non interruptibles assure la protection des données partagées entre les processus.

22
Exemple T C D P1: P2: P3: P4: P5: Définir : un cycle majeur PPCM = (25,50,100)=100 un cycle mineur qui correspond au rythme des interruptions d'horloge. Pendant le cycle mineur l'application ne peut être interrompue. Ils définissent des points de contrôle permettant de contrôler que les traitements applicatifs ont bien respecté leurs échéances.

23
Exemple T C D P1: P2: P3: P4: P5: P1 P2 P3P5 P1 P2 P4 - P1 P2 P3 - P1 P2 P4 - IT horloge IT horloge IT horloge IT horloge 25 IT horloge = interruption possible

24
Les inconvénients Comment prendre en compte des traitements qui ne sont pas périodiques ? Comment ajouter un traitement supplémentaire sans modifier tout le système ? Difficile si le nombre de processus augmente. Il n'existe pas de solution optimale dont la complexité soit polynomiale en fonction du nombre de processus. Mais, il est très utilisé dans les systèmes critiques, en particulier les systèmes aéronautiques ou les systèmes de défenses.

25
Les algorithmes de décisions en ligne
Les prise de décision s'effectuent à partir de critères qui peuvent être statiques (valeur d'une priorité) dynamique (dépend du temps) Dans les modèles statiques, on utilise une transformation hors ligne des contraintes temporelles en entiers fixes représentant les priorités. Dans les modèles dynamiques, la priorité évoluera en fonction du temps.
 dynamique (dépend du temps) Dans les modèles statiques, on utilise une transformation hors ligne des contraintes temporelles en entiers fixes représentant les priorités. Dans les modèles dynamiques, la priorité évoluera en fonction du temps.")
26
Plan Ordonnancement Obtention des tests de faisabilité entre processus
Analyse de l'interaction entre processus Inclusion de processus apériodiques

27
Obtention de tests de faisabilité d'ordonnancement
Existe-t-il des tests qui permettent de prévoir si un ensemble de tâches va respecter ses contraintes temporelles ?

28
Ordonnancement Rate-Monotonic (monotone par taux)
Il désigne la méthode d'affectation hors ligne de priorités statiques à un ensemble de tâches. Les critères retenus pour les tâches sont les tâches sont périodiques et sont à l'état PRÊT au début de chaque période. Leur échéance se situe à la fin de la période. Les tâches peuvent être préemptées. Les tâches sont indépendantes les unes des autres. Le temps d'exécution est connu. L'affectation des priorités aux tâches se fait en fonction de la fréquence des tâches. Si Ti désigne la période de la tâche i, sa priorité est égale à 1/Ti

29
Conditions suffisantes de l'analyse Rate Monotonic
U = durée i / Période i i=1 Dans le cas où Di=Ti, n tâches respectent toutes les échéances si : n Ui = C i / T i i(2 1/i -1) i=1 i, 1 i n
 i=1. i, 1 i n.")
30
Principe de l'obtention
Cas simplifié de deux tâches. But : Atteindre une utilisation maximale du processeur en toute sécurité. On cherche donc une borne d'utilisation maximale pour tout ensemble de tâches qui utilisent le processeur au maximum de ses capacités. Démarche : Pour un C1 donné on cherche C2 de façon à utiliser un maximum le processeur.

31
Taux d'utilisation

32
Exemple pour RM : T C P P P

33
Exemple pour RM : T C P P P

34
L’application numérique pour n = 3 donne :
Exemple pour RM : T C P P P Comme la condition suffisante est vérifiée alors l'ordonnancement est possible. L’application numérique pour n = 3 donne :

35
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 On a bien,
La condition de faisabilité est satisfaite On peut appliquer l'algorithme RM. Comme la condition suffisante est vérifiée alors l'ordonnancement est possible.

36
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

37
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

38
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

39
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

40
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

41
Exemple pour RM : T C Préemption de P3 par P1!!! P1 100 20 P2 150 40
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

42
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 60 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

43
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 60 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

44
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 60 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

45
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 30 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

46
Exemple pour RM : T C Préemption de P3 par P2!!! P1 100 20 P2 150 40
30 P1 P2 P3 temps Alors allons-y !!!!! RM va procéder de la manière suivante:

47
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 30 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

48
Exemple pour RM : T C Préemption de P3 par P1!!! P1 100 20 P2 150 40
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

49
Exemple pour RM : T C P1 100 20 P2 150 40 P3 350 100 P1 P2 P3
temps Alors allons-y !!!!! RM va procéder de la manière suivante:

50
Exemple pour RM : P1 P2 P3 Alors allons-y !!!!!
RM va procéder de la manière suivante: 0 20 20 60 80

51
Exemple pour RM : Utilisation du modulo. P1 P2 P3
Utilisation du modulo.

52
Remarques : La condition de faisabilité est très restrictive puisque dans l'exemple précédent, nous étions limités à utiliser le processeur à 77,9 % de sa capacité totale. Mais notre but est de l’utiliser au maximum de ses capacités et cela en toute sécurité. De plus ceci doit se faire en toute sécurité !!!!!! L'ordonnancement est-il possible même si Ui >0.780???

53
Quelques précisions : On néglige le temps de communication et d'ordonnancement. Elles sont indépendants les unes des autres. La capacité de chaque tâche est connue. Leur échéance se situe à la fin de la période. Les tâches sont périodiques et sont à l’état prêt au début de chaque période. Elles ne se suspendent pas elles-mêmes en cours d'exécution. L'ordonnacement lors de l'execution du systeme s'effectuent avce la politique HPF (selection de la tâche de plus forte priorite).
.")
54
Exemple fig 2.1

55
RM Cas d'échec Il existe une solution

56
Théorème de la zone critique
La condition de l'analyse RM est très restrictive. Théorème : Si toutes les tâches arrivent initialement dans le système simultanément et si elles respectent leur première échéance, alors toutes les échéances seront respectées par la suite, quel que soit l'instant d'arrivée des tâches. Remarques : C'est une condition nécessaire et suffisante si toutes les tâches du système sont initialement prêtes au même instant. C'est uniquement une condition suffisante dans le cas contraire.

57
Test de terminaison (completion time test)
Si l'échéance Di est égale à la période Ti, le test est le suivant. i min C j / t *t / T j 1 0<t<Di j=1 i, 1 i n Avec l'indice le plus faible à la tâche la plus prioritaire.

58
Méthode itérative pour le théorème de la zone critique
On recherche le temps t tel que : i t = C j *t / T j j=1 i, 1 i n, t Di, i Soit W i(t) = C j *t / T j j=1 Wi(t) représente la demande cumulée de temps processeur de toutes les tâches jusqu'à la tâche i dans l'intervalle [0,t]. On recherche Wi(t) / Wi(t)=t par itérations successives et ce pour toutes les tâches i i On part de t0 = Cj, si l'instant t ne respecte pas la condition, on j=1 itère en prenant comme nouveau temps t = Wi(t)
 = C j *t / T j j=1. Wi(t) représente la demande cumulée de temps processeur de toutes. les tâches jusqu à la tâche i dans l intervalle [0,t]. On recherche Wi(t) / Wi(t)=t par itérations successives et ce pour. toutes les tâches i. i. On part de t0 = Cj, si l instant t ne respecte pas la condition, on. j=1 itère en prenant comme nouveau temps t = Wi(t)")
59
Exemple 3 = 300/100 P1 P2 P3 Soit W i(t) = C j *t / T j=40*3
 = C j *t / T j=40*3")
60
Exemple Pi T C P P P U = 0.779, Mais on va montrer que l'exemple répond au théorème de la zone critique. Pour i=1 t0 = C1 = 40 = W1(40) Stop Pour i=2 t0 = C1+C2 = 80 = W2(80) Stop Pour i=3 t0 = C1+C2+C3 = 180 (>100 et 150) W 3(180)= 2C1+2C2+C3 = 260 W 3(260)= 3C1+2C2+C3 = 300 W 3(300)= 3C1+2C2+C3 = 300 c'est la condition recherchée Les trois tâches sont donc ordonnançables selon le théorème de la zone critique. La troisième tâche terminera l'exécution de sa première instance au temps 300.
 Stop. Pour i=2 t0 = C1+C2 = 80 = W2(80) Stop. Pour i=3 t0 = C1+C2+C3 = 180 (>100 et 150) W 3(180)= 2C1+2C2+C3 = 260. W 3(260)= 3C1+2C2+C3 = 300. W 3(300)= 3C1+2C2+C3 = 300 c est la condition recherchée. Les trois tâches sont donc ordonnançables selon le théorème de la. zone critique. La troisième tâche terminera l exécution de sa première. instance au temps 300.")
61
simulation du comportement

62
Autre algorithme : inverse deadline
Algorithme avec comme critère l'inverse de la deadline D

63
Inverse deadline D croissant 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
18 19 T2 T1 T3 nop D croissant

64
Ordonnancements dynamiques
Les ordonnancements sont dits dynamiques car l'allocation de priorité aux tâches se fait lorsque le système est en fonctionnement. Ils utilisent l'un des critères suivant à fin de prendre les décisions : Échéances la plus proche d'abord (Earliest Deadline First) prend en compte l'urgence du travail à accomplir. Marge la plus courte d'abord (Least Laxity Fisrt) prend également en compte l'urgence du travail à accomplir mais lui rajoute la notion de durée du travail.
 prend en compte l urgence du travail à accomplir. Marge la plus courte d abord (Least Laxity Fisrt) prend également en compte l urgence du travail à accomplir mais lui rajoute la notion de durée du travail.")
65
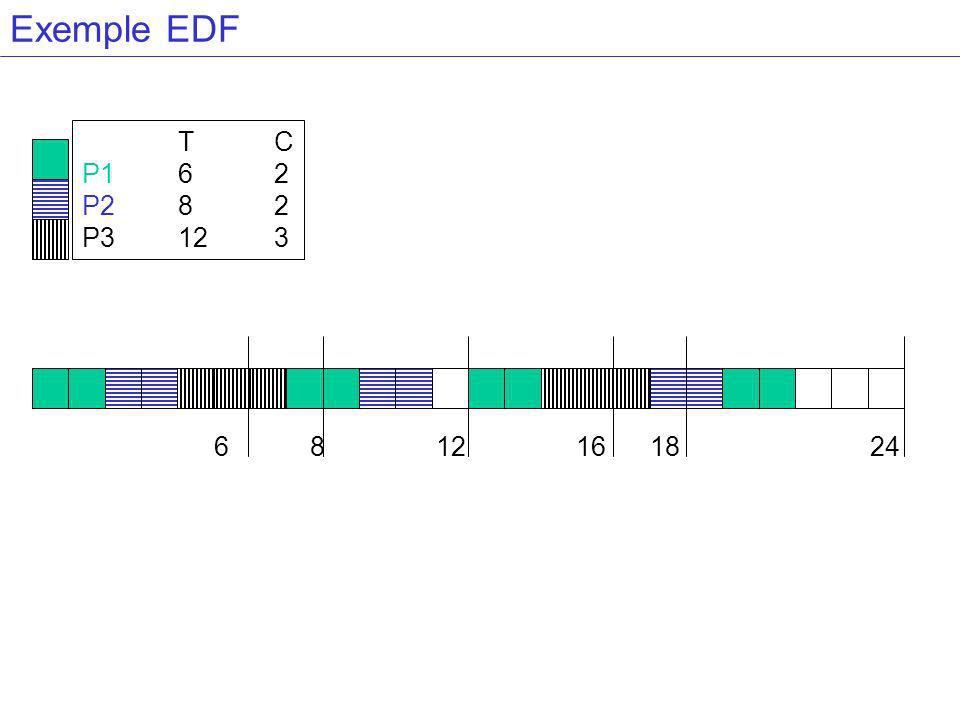
Exemple EDF T C P1 6 2 P2 8 2 P3 12 3
66
Exemple LLF Least Laxity Fisrt T C P1 6 2 P2 8 2 P3 12 3
La marge = Échéance - durée restante de traitement - temps courant

67
Exemple T D C ML T1 3 3 1 =Deadline-C_restante T2 4 4 1 T3 6 3 2
Ici T3 peut être aussi ordonnancé

68
Critère de l'ordonnançabilité EDF et LLF
Si l'on applique les algorithmes EDF et LLF à des tâches indépendantes périodiques le critère de faisabilité est donné par : n Ui = C i / T i 1 i=1

69
Optimalité de l'algorithme d'ordonnancement EDF
L'algorithme EDF est dit optimal car si un algorithme arrive à ordonnancer un ensemble de tâches possédant des échéances et des temps de traitement arbitraires, alors EDF saura également le faire.

70
Plan Ordonnancement Obtention des tests de faisabilité entre processus
Analyse de l'interaction entre processus Inclusion de processus apériodiques

71
Rappels la communication et la synchronisation

72
Analyse de l'interaction entre processus
Prise ne compte des cas de blocage : inversion de priorité Héritage de priorité Prise en compte des cas de blocage dans l'analyse RM.

73
Analyse de l'interaction entre processus
Prise en compte des cas de blocage : inversion de priorité. Hypothèse supplémentaire : Les tâches accèdent en exclusion mutuelle à des ressources communes. Ceci rend les tâches potentiellement dépendantes les unes des autres. Problème : une tâche de plus faible priorité peut bloquer une autre tâche de priorité plus forte quand elle est en section critique = Problème de l'inversion de priorité.

74
Inversion de Priorité t0 Rés 1 4 5 6 7 8 10 12 14 15 16 S j1 S fin j2
j3 démarre à tps=0 1 4 5 6 7 8 10 12 14 15 16 S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
75
Inversion de Priorité t0 Rés 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin
j3 demande S à tps=1 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
76
Inversion de Priorité t0 Rés 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin
j1 démarre à tps=2 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
77
Inversion de Priorité t0 Rés 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin
1 2 4 5 6 7 8 10 12 14 15 16 j1 demande S qui est pris par j3 donc il est bloqué et redonne la main à j3 S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
78
Inversion de Priorité t0 Rés 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin
À t=7, j2 démarre son exécution et finit à t=10 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
79
Inversion de Priorité t0 Rés 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin
1 2 À t=10, j2 finit son exécution et redonne la main à j3 4 5 6 7 8 10 12 14 15 16 S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
80
Inversion de Priorité t0 Rés 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin
1 2 A t=12, j3 relâche S et j1 profite pour récupérer S qu'elle avait demandé 4 5 6 7 8 10 12 14 15 16 S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
81
À t=15, j1finit son exécution et laisse
Inversion de Priorité À t=15, j1finit son exécution et laisse j3 finir elle aussi. 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
82
Inversion de priorité Durée ? 1 2 4 5 6 7 8 10 12 14 15 16 S j1 S fin
1 2 4 5 6 7 8 10 12 14 15 16 Durée ? S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
83
Solutions à l'inversion de priorité
Une tâche ne doit pas être préemptée systématiquement si elle est en section critique. Cette solution est acceptable pour des accès courts. Sinon le système créera des situations d'inversion de priorité fréquentes et inutilement longues. Méthode de l'héritage de priorité (priority inherance). Le système effectue une gestion dynamique de priorité. L'idée est de rajouter aux sémaphores la notion de possesseurs.
. Le système effectue une gestion dynamique de priorité. L idée est de rajouter aux sémaphores la notion de possesseurs.")
84
Héritage de priorité Le possesseur d'un sémaphore est la tâche qui a demandé et obtenu le droit de rentrer dans la zone d'exclusion mutuelle protégé par le sémaphore. Dans l'héritage de priorité simple, les sémaphores gèrent leur file d'attente en tenant compte des priorités des tâches qui désirent prendre le sémaphore. Lorsqu'une tâche détient un sémaphore et qu'une autre le réclame, la priorité de la tâche qui possède le sémaphore est augmentée au niveau de la priorité de la tâche qui le réclame.

85
Exemple T3 demande et obtient S T1 demande S Fin T2 Fin T1
+ Prioritaire T3 hérite de la priorité de T1 Fin T3 T3 relâche S

86
Comparaison ?

87
Autre exemple j1 demande V qui est pris par j4.j4 bloque donc j1 et hérite sa priorité. j4 demande V les tâches 1 et 2 ne partagent aucune ressource. Déroulement normale jusqu’à la fin. j5 démarre. j5 demande S j4 demande S donc j5 bloque j4 qui bloque j1,donc j1 est bloqué par j5 qui hérite sa priorité (phénomène de Transitivité). j5 prend la main puis libère S à tps=11. j2 demande S qui est pris par j5. j5 bloque j2 et hérite sa priorité. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 1 2 3 4 5 taches ri ei pi Sections critiques 7 3 1 [V;1] j1 5 3 2 [S;1] j2 4 2 3 j3 j4 2 6 4 [V;2,5[S;1,5]] j5 6 5 [S;4]
. j5 prend la main puis libère S à tps=11. j2 demande S qui est pris par j5. j5 bloque j2 et hérite sa priorité taches. ri. ei. pi. Sections critiques [V;1] j [S;1] j j3. j [V;2,5[S;1,5]] j [S;4]")
88
Partage de plusieurs ressources : les inter-blocages possibles
Lorsqu'une tâche peut utiliser plusieurs sémaphores des cas d'inter-blocage peuvent apparaître. L'inter-blocage n'est pas dû à une inversion de priorité mais à l'entrelacement des accès aux sémaphores.

89
Exemple P(S1) P(S2) T1 bloquée T1 démarre P(S2) P(S1) T2 démarre
 P(S2) T1 bloquée T1 démarre P(S2) P(S1) T2 démarre")
90
Solutions 1 Demander l'accès aux sémaphores dans le même ordre.
2 Exécuter en exclusion mutuelle toutes les sections correspondant aux sections critiques imbriquées. On garantit qu'une tâche ne peut commencer l'exécution d'une section critique qu'à condition de s'exécuter à un niveau de priorité supérieur aux niveaux de priorité des sections critiques préemptées.

91
Solution : Héritage par la méthode du verrou le plus haut
Dans la technique du verrou le plus haut (highest lock) la tâche qui utilise un sémaphore hérite d'une priorité qui est supérieure au plafond de priorité du sémaphore. Le plafond de priorité (priority celling) d'un sémaphore est égal à la priorité maximale des tâches pouvant prendre le sémaphore. Cela consiste à maintenir une valeur qui représente la valeur maximale du plafond courant. Priorité(verrou)= priorité_max(tâches qui prennent le verrou). Plafond=Max(priorités des verrous pris).
 la tâche qui utilise un sémaphore hérite d une priorité qui est supérieure au plafond de priorité du sémaphore. Le plafond de priorité (priority celling) d un sémaphore est égal à la priorité maximale des tâches pouvant prendre le sémaphore. Cela consiste à maintenir une valeur qui représente la valeur maximale du plafond courant. Priorité(verrou)= priorité_max(tâches qui prennent le verrou). Plafond=Max(priorités des verrous pris).")
92
Exemple P(S1) P(S2) V(S2) V(S1) T1 Prêt P(S2) P(S1) V(S1) V(S2)
T2 démarre

93
Solution : Héritage par la méthode du plafond de priorité
Dans la méthode du plafond de priorité (priority ceilling protocol) l'OS maintient une valeur qui représente la valeur maximale du plafond courant. Lorsqu'une tâche essaye d'exécuter une section critique, elle est suspendue sauf si sa priorité est supérieure au plafond de priorité de tous les sémaphores pris par les autres tâches.
 l OS maintient une valeur qui représente la valeur maximale du plafond courant. Lorsqu une tâche essaye d exécuter une section critique, elle est suspendue sauf si sa priorité est supérieure au plafond de priorité de tous les sémaphores pris par les autres tâches.")
94
Exemple P(S2) V(S1) P(S1) refusé T1<=Plafond P(S1) V(S2) T1 démarre
P(S1) V(S1) V(S2) P(S2) Plafond = Max(T1,T2)=T1 héritage
 V(S1) V(S2) P(S2) Plafond = Max(T1,T2)=T1. héritage.")
95
Exemple 1 2 4 6 8 10 12 14 16 18 20 P1> 1 2 3 4 5 P4< 1 2=П(t) 3
1 2 4 6 8 10 12 14 16 18 20 P1> 1 2 3 4 5 P4< 1 2=П(t) 3 4 5 ?
")
96
Comparaison 2 4 6 8 10 12 14 16 18 20 1 2 3 4 5 1 2 3 4 5

97
Plan Ordonnancement Obtention des tests de faisabilité entre processus
Analyse de l'interaction entre processus Inclusion de processus apériodiques

98
Inclusion de processus apériodiques
On peut penser à interrompre les tâches périodiques pour faire passer les tâches apériodiques jusqu'à ce que celles ci se terminent. Mais on peut mettre en péril l'ordonnancement. On peut affecter la priorité la plus basse aux tâches apériodiques. Cette solution n'offre qu'un temps de réponse moyen aux tâches apériodiques.

99
Les serveurs On affecte un processus périodique en charge de contrôler les taches apériodiques en leur offrant la possibilité d'exécuter leur activité au niveau de priorité requis. Les méthodes existantes Le serveur par scrutation (polling server) le serveur différé (deferabe serveur)
 le serveur différé (deferabe serveur)")
100
Serveur par scrutation
Le serveur de scrutation a la priorité la plus forte. On définit une capacité Cm pour cette tâche en fonction du profil d'arrivée des événements apériodiques à servir. Le serveur est divisé en deux parties La première regarde périodiquement s'il y a des événements périodiques à traiter La deuxième partie est déclenchée s'il y a au moins un événement en attente d'être traité.

101
Exemple T C P1 10 2 P2 15 6 S 5 2 t C e e2 6 2 e1 e2 0.5 Scrutation e1 sera pris en compte en 5 Prise en compte e2 prise en compte immédiate

102
Serveurs d'événements apériodiques
On fournit une ressource privée (une tâche fictive) à l'usage exclusif des tâches apériodiques. On crée une tâche périodique DS, de capacité Cds et de période Tds qui servent à définir sa priorité selon la méthode RM. Si toutes les tâches apériodiques sont traitées avec moins de capacité, on abandonne plus tôt la tâche DS (la capacité non utilisée est alors perdue).
 à l usage exclusif des tâches apériodiques. On crée une tâche périodique DS, de capacité Cds et de période Tds qui servent à définir sa priorité selon la méthode RM. Si toutes les tâches apériodiques sont traitées avec moins de capacité, on abandonne plus tôt la tâche DS (la capacité non utilisée est alors perdue).")
103
Exemple

104
Exemple T C P1 6 2 P2 8 3 Ds 5 1 t C e1 1 .5 e2 7 2 e3 14 1 e1 e2 e3
Épuisement de DS Renouvellement de DS

105
Serveur périodique et ordonnancement dynamique EDF
Les ordonnancements dynamiques permettent a priori, une meilleure utilisation du processeur. L'idée est de servir les tâches aux contraintes plus lâches au moyen de serveurs périodiques.

106
Exemple T C P1 6 2 P2 8 3 Ds 4 1 t C e e2 6 2 Arrive e2 et EDF plus gd e1 e2 Épuisement de DS E2 est là mais P1 plus urgent EDFP1=12-9 EDFe2=3 Renouvelement de DS

107
Serveur sporadique

108
Résumé : Rate Monotonic
Algorithme statique d'assignation de priorité Test : charge totale sous la contrainte n(2 1/n-1) Analyse exacte par le théorème de la zone critique RM peut être augmenté pour prendre en compte les situations de blocage et les événements apériodiques. Optimal car si un autre algorithme statique arrive à produire un ordonnancement alors RM y arrive aussi.
 Analyse exacte par le théorème de la zone critique. RM peut être augmenté pour prendre en compte les situations de blocage et les événements apériodiques. Optimal car si un autre algorithme statique arrive à produire un ordonnancement alors RM y arrive aussi.")
109
Résumé : Earliest Dealine First
Dynamique Test : charge totale < 100% Entraîne le moins de changements de contexte EDF est optimal car on peut transformer tout ordonnancement arbitraire en ordonnancement EDF. EDF peut être augmenté pour prendre en compte les situations de blocage et les événements apériodiques. Meilleur algorithme quand la loi d'arrivée des tâches est quelconque et quand on ne connaît par leur capacité.

110
Exercice 1 On considère un système constitué de deux tâches périodiques indépendantes s'exécutant sur un processeur. Ces deux tâches sont définies par : Ces deux tâches sont elles ordonnançables par l'analyse Rate Monotonic ? Sont elles ordonnaçables par EDF ? Pi T C T1 4 2 P2 10 5

111
Exercice 2 On considère un système constitué de trois tâches périodiques définies par : On applique d'abord l'analyse Rate Monotonic sur les tâches. Grâce au test de terminaison, calculer l'instant auquel la tâche3 termine sa première exécution. Respecte-t-elle son échéance ? On classe maintenant les trois tâches en fonction de leurs échéances (analyse deadline Monotonic). Utiliser le test suffisant de l'analyse RM pour prouver que les tâches 1,3 sont ordonnançables ( on considère que la tâche C subit un blocage E3 égal à T3-D3. Pi T C D T P P
. Utiliser le test suffisant de l analyse RM pour prouver que les tâches 1,3 sont ordonnançables ( on considère que la tâche C subit un blocage E3 égal à T3-D3. Pi T C D. T P P")
112
Plan : Introduction I) De la théorie à la pratique
II) Mise en œuvre du simulateur 1) Modélisation des tâches 2) Gestion des priorités Java 3) Problèmes engendrés par l’OS 4) Démonstration du simulateur. Conclusion
 Mise en œuvre du simulateur. 1) Modélisation des tâches. 2) Gestion des priorités Java. 3) Problèmes engendrés par l’OS. 4) Démonstration du simulateur. Conclusion.")
113
Le cœur du scheduler : Comment gérer les priorités des threads pour qu’un ordonnancement tel que Rate Monotonic soit respecté ?

114
Gestion de priorité (1) :
1ère idée : Attribuer un niveau de priorité à chaque tâche à ordonnancer.

115
Gestion de priorité (1) :
Problème : Si le nombre de tâches est supérieur au nombre de priorités… !

116
Gestion de priorité (2) :
2 ème idée : Utiliser 3 niveaux de priorités. 1 niveau pour le scheduler : priorité maximum 1 autre pour la tâche courante : priorité intermédiaire 1 autre pour les autres tâches : priorité minimum.

117
Gestion de priorité (3) :
Java virtuel machine scheduler T1 T2 T3 T4 Max Middle Min priorité

118
Gestion de priorité (4) :
Max Middle Min Java virtuel machine scheduler T1 T2 T3 T4

119
Gestion de priorité (5) :
Max Middle Min Java virtuel machine scheduler T2 T1 T3 T4

120
Gestion de priorité (7) :
Max Middle Min Java virtuel machine scheduler Sleep 60 ns T2 T1 T3 T4

121
Gestion de priorité (8) :
Max Middle Min Java virtuel machine scheduler T1 T2 T3 T4

122
Gestion de priorité (9) :
Max Middle Min Java virtuel machine scheduler T2 T1 T3 T4

123
Gestion de priorité (10) :
Max Middle Min Java virtuel machine scheduler T1 T2 T3 T4

124
Annexe Inversion de Priorité
j3 démarre à tps=0 j3 demande S à tps=1 À t=7, j2 démarre son exécution et finit à t=10 j1 démarre à tps=2 1 2 A t=12, j3 relâche S et j1 profite pour récupérer S qu'elle avait demandé 4 À t=10,j2 finit son exécution et redonne la main à j3 5 j1 demande S qui est pris par j3 donc il est bloqué et redonne la main à j3 À t=15, j1finit son exécution et laisse j3 finir elle aussi. 6 7 8 10 12 14 15 16 S j1 S fin j2 S S j3 t0 Rés j S(2) j2 7 j S(5) + Prioritaire
 j2 7. j3 0 S(5) + Prioritaire.")
Présentations similaires
>")







 Consolidation: tester les connaissances acquises 1 Etude de la commande du système.>")










