Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
INITIATION COMMANDE PRÉDICTIVE
A LA COMMANDE PRÉDICTIVE BESANÇON J. Richalet B. Parisse ADERSA Août 2001

3
P R O D U C T I O N AUGMENTATION DE LA PRODUCTION
AMELIORATION DE LA QUALITE MEILLEURE DISPONIBILITE DIMINUTION DES COUTS MARGINAUX

4
I N S T R U M E N T A T I ON (PFC ou PID ?...)
PLUS PUISSANT QUE LE PID PLUS ROBUSTE QUE LE PID PLUS FACILE A REGLER IMPLANTATION GENERIQUE

5
O P E R A T E U R S CHARGE DE TRAVAIL A HAUTE FREQUENCE
BASCULEMENT DE REGULATEURS SANS ANGOISSE MEILLEURE CONNAISSANCE DU PROCESSUS OPTIMTION NIV2 et DIAGNOSTIC

6
Réacteurs Batch ou Continus
SECTEURS Pétrole Chimie Pharmacie, Alimentaire, Environnement Defense Automobile Metallurgie, Energie Distillation Echangeurs Réacteurs Batch ou Continus Echangeurs - Fours

7
COMMANDE PREDICTIVE 1°) HISTORIQUE 2°) ETAT ACTUEL 1968
: 4 Principes Fondamentaux 1973 : 1° Application Industrielle - MARTIGUES : 1° Génération : IDCOM / DMC : 2° Génération : HIECON / QDMC 1989 : 3° Génération : PFC / GPC 1997 : 4° Génération : PPC 2°) ETAT ACTUEL 2000 : > lents > x ? rapides LENTS : 5 méthodes / 8 Sociétés Engineering RAPIDES : Automobile Défense Métallurgie Divers
 ETAT ACTUEL : > lents. > x rapides. LENTS : 5 méthodes / 8 Sociétés Engineering. RAPIDES : Automobile. Défense. Métallurgie. Divers.")
8
APPLICATIONS INDUSTRIELLES P.F.C.
DEFENCE ROLLING MILLS q Mine hunter (CGA) (CNES) (THOMSON) (F. NAVY) (CSEE) (THOMSON-TRD) (THOMSON DSE) (SFIM) (LASERDOT) (C.S. DEFENSE) (NAVY) q Ariane 5 attitude control q Coating lines (PECHINEY) q Missile autopilot q Thickness control - Roll eccentricity (PECHINEY) q Laser guided missile q Mono-multi-stands Rolling mills (PECHINEY) q Gun turrets q Continuous casting (slab) (SOLLAC) q Radar antennas q Push-ovens (PECHINEY) q Infra Red camera q Coke furnace (SOLLAC) q High speed Infra Red q Thin continuous casting (PECHINEY) q Missile launch q Hot/cold/Thin rolling mills q Camera mount q Radar antennas q Laser mirror MISCELLANEOUS q Tank turret (T. 55) q Mine sweeper auto-pilot Bioreactor Melissa (E.S.A.) q Aircraft carrier auto-pilot q q Plastic extrusion robot (high speed) (SEPRO) Four céramique (DESHOUILLERES) Temperature control of gas furnace (GAZ DE FRANCE) Temperature control of TGV train carriage (SNCF - FAIVELEY) River dam level control (C.N. Rhône) Powder milk dryer (UCLAB) Electric furnace (NORDON) AUTOMOTIVE q Gear box test bench q Dynamic test bench engine q Fuel injection q Idle fuel injection q Clutch antistroke q Gear box (tank) q Hybrid car (electric-fuel) q Air conditioning (RENAULT) (RENAULT) (RENAULT) (PEUGEOT) (PEUGEOT) CARACTERISTIQUES (C.S. DEFENSE) Plus ancienne Commande Prédictive Plusieurs milliers d’applications dans beaucoup de secteurs. Facilité de réglage. (PEUGEOT) (VALEO)
 (CNES) (THOMSON) (F. NAVY) (CSEE) (THOMSON-TRD) (THOMSON DSE) (SFIM) (LASERDOT) (C.S. DEFENSE) (NAVY) q. Ariane 5 attitude control. q. Coating lines. (PECHINEY) q. Missile autopilot. q. Thickness control - Roll eccentricity. (PECHINEY) q. Laser guided missile. q. Mono-multi-stands Rolling mills. (PECHINEY) q. Gun turrets. q. Continuous casting (slab) (SOLLAC) q. Radar antennas. q. Push-ovens. (PECHINEY) q. Infra Red camera. q. Coke furnace. (SOLLAC) q. High speed Infra Red. q. Thin continuous casting. (PECHINEY) q. Missile launch. q. Hot/cold/Thin rolling mills. q. Camera mount. q. Radar antennas. q. Laser mirror. MISCELLANEOUS. q. Tank turret (T. 55) q. Mine sweeper auto-pilot. Bioreactor Melissa. (E.S.A.) q. Aircraft carrier auto-pilot. q. q. Plastic extrusion robot (high speed) (SEPRO) Four céramique. (DESHOUILLERES) Temperature control of gas furnace. (GAZ DE FRANCE) Temperature control of TGV train carriage. (SNCF - FAIVELEY) River dam level control. (C.N. Rhône) Powder milk dryer. (UCLAB) Electric furnace. (NORDON) AUTOMOTIVE. q Gear box test bench. q Dynamic test bench engine. q Fuel injection. q Idle fuel injection. q Clutch antistroke. q Gear box (tank) q Hybrid car (electric-fuel) q Air conditioning. (RENAULT) (RENAULT) (RENAULT) (PEUGEOT) (PEUGEOT) CARACTERISTIQUES. (C.S. DEFENSE) Plus ancienne Commande Prédictive. Plusieurs milliers d’applications dans beaucoup. de secteurs. Facilité de réglage. (PEUGEOT) (VALEO)")
9
POURQUOI ? Gasoil Pétrole brut Résidu

10
POURQUOI Viscosité LIMITE ! t

11
POURQUOI ? H O D

12
POURQUOI ? P eT = 0 ! X Trajectoire Cible Pointage t

13
MODÉLISATION ÉTAT STRUCTURE MESURES LIEN FONCTIONNEL VARIABLES
PARAMÈTRES X(t) P PRINCIPE DE BASE : LA STRUCTURE EST INDÉPENDANTE DE L ’ ÉTAT MODÉLISATION : RECHERCHE DE CET INVARIANT
 P. PRINCIPE DE BASE : LA STRUCTURE EST INDÉPENDANTE DE L ’ ÉTAT. MODÉLISATION : RECHERCHE DE CET INVARIANT.")
14
EXEMPLE T.dS(t)/dt + S(t) = K.E(t-R) Variables S, dS/dt, E Paramètres
K = gain T = Constante de temps R = Temps de retard INTRODUCTION DE 2 ESPACES L ’ESPACE d ’ ÉTAT (S dS/dt E) L ’ESPACE PARAMÈTRIQUE (K, T, R)
 L ’ESPACE PARAMÈTRIQUE. (K, T, R)")
15
TYPES DE MODÈLES MODÈLE DE CONNAISSANCE MODÈLE DE REPRÉSENTATION
EN FAIT : ENSEMBLE DE « MODÈLES GRIS » STRUCTURÉS EN SOUS SYSTÈMES

16
REPRÉSENTATION Discrète tech = TRBO/40
La compatibilité avec Shannon est assurée par filtrage Passe-Bas des signaux (« Théorème de Shannon à l ’envers ») T.dS(t)/dt + S(t) = K.E(t-R) s(n) = s(n-1).a + (1-a). K.e (n-1-r) a = exp (-tech/T) K = K r = R/tech
 T.dS(t)/dt + S(t) = K.E(t-R) s(n) = s(n-1).a + (1-a). K.e (n-1-r) a = exp (-tech/T) K = K r = R/tech.")
17
METHODES IDENTIFICATION : 2 Grandes familles
Estimation Moindres Carrés (Fourier) sm(n) = sp(n-1) .am + (1-am).Km .e(n-1-rm) Méthode du modèle sm(n) = sm(n-1) .am + (1-am).Km .e(n-1-rm) Estimation : simple mais biaisée am # ap Modèle : nécessite un simulateur mais universelle
 sm(n) = sp(n-1) .am + (1-am).Km .e(n-1-rm) Méthode du modèle. sm(n) = sm(n-1) .am + (1-am).Km .e(n-1-rm) Estimation : simple mais biaisée am # ap. Modèle : nécessite un simulateur mais universelle.")
18
C = S (sm (n) - sp(n))2 = C(Km, Tm)
IDENTIFICATION LOCALE : Trouver le meilleur point de l ’espace paramétrique tel que : Un critère d ’identité de comportement soit le plus petit possible : e/g C = S (sm (n) - sp(n))2 = C(Km, Tm) GLOBALE : Trouver tous les modèles de l ’espace paramétrique tel que C < Co Co fixé
 - sp(n))2 = C(Km, Tm) GLOBALE : Trouver tous les modèles de l ’espace paramétrique tel que. C < Co Co fixé.")
19
PROCÉDURE FILTRAGE DES DONNÉES FILTRAGE PARALLÈLE S = H. E S.P =
H. E.P Sp = H. Ep RÈGLE PRATIQUE « 1/3, 3 »

20
PROTOCOLE D ’ESSAI Problème délicat….!
CONTRAINTES INDUSTRIELLES FORTES HORIZON AMPLITUDE SPECTRE OPTIMISATION DETERMINISTE DU PROTOCOLE SUITE DE CRENEAUX (Max Min ) DE DUREES Ti VARIABLES SBPA / PRBN à proscrire danger ….
 DE DUREES Ti VARIABLES. SBPA / PRBN à proscrire danger ….")
21
PROTOCOLE D’ESSAI 120 d°C 100 entrée calo. 80 sortie calo. masse 60
vanne chaude vanne froide 40 20 sec 500 1000 1500 2000 2500

22
IDENTIFICATION ENTREE CALOPORTEUR
120 d°C 100 80 modèle & processus 60 40 20 sec 500 1000 1500 2000 2500

23
IDENTIFICATION GLOBALE
x 10 -6 5.6 CONVEX GAIN 5.5 5.4 5.3 5.2 5.1 TAU sec 5 20 21 22 23 24 25 26 27 28 29 30

24
IDENTIFICATION SORTIE CALOPORTEUR
d°C 100 90 80 modèle & processus 70 60 50 40 30 20 500 1000 1500 2000 2500 sec

25
IDENTIFICATION DE MASSE TEMP.
80 d°C 75 modèle & processus 70 65 60 55 50 45 40 35 sec 30 500 1000 1500 2000 2500

26
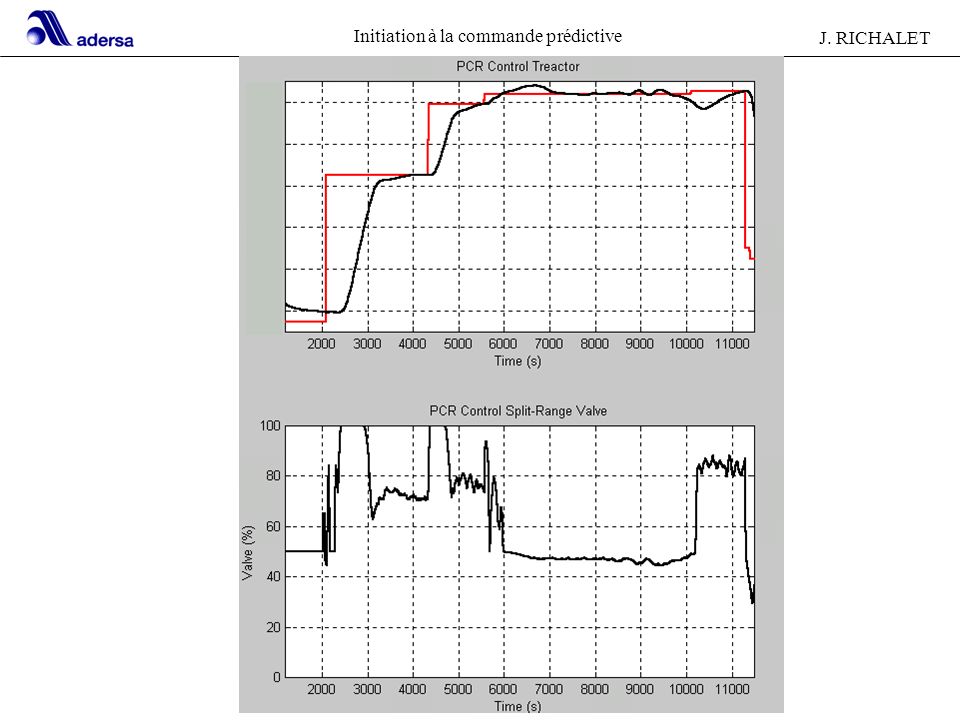
TEST DE COMMANDE 120 entrée calo. CONSIGNE MASSE 100 sortie calo.
80 changement TRBF 60 vanne chaude 40 press fl. 20 2100 2200 2300 2400 2500 2600 2700 2800 2900

27
BASF

28
B A S F

29
B A S F

30
B A S F

32
DE LA COMMANDE PREDICTIVE
LES 4 PRINCIPES DE LA COMMANDE PREDICTIVE Image opératoire Tâche future / Sous-tâche Action Comparaison, Prédit / Réalisé Modèle interne Trajectoire de référence Structuration de la MV Solveur Auto-compensateur

33
TRAJECTOIRE DE REFERENCE
Passé n Futur TRBF consigne sortie processus e (n) sortie prédite C(n+H) sortie modèle D variable manipulée H 1 2 MV i horizon de prédiction y P trajectoire de référence ref M coïncidence (n+H) TRAJECTOIRE DE REFERENCE
 sortie prédite. C(n+H) sortie modèle. D. variable manipulée. H MV. i. horizon de. prédiction. y. P. trajectoire. de référence. ref. M. coïncidence. (n+H) TRAJECTOIRE. DE REFERENCE.")
34
RAPPEL T .dS/dt + S = E(t).K SOLUTION LIBRE : Sli(t) = S(0).exp(-t/T)
Sli(n) = S(0).aN a = exp(- tech /T) « Poids du passé » SOLUTION FORCÉE : E(t) = u (t). e.g : échelon unitaire SF(t) = (1-exp(-t/T).Km SF(n+H) = (1-aH).Km « Action future »
 = S(0).aN a = exp(- tech /T) « Poids du passé » SOLUTION FORCÉE : E(t) = u (t). e.g : échelon unitaire. SF(t) = (1-exp(-t/T).Km. SF(n+H) = (1-aH).Km. « Action future »")
35
RAPPEL SOLUTION : S(t) = Sli(t) + SF(t)
S(t) = S(0).exp(-t/T) + Km.(1-exp(-t/T).u(t) S(n+H) = S(n). aH + Km.(1-aH).u(n) S(n+H) = S(n). aH + Km.(1-aH).MV(n)
 = S(0).exp(-t/T) + Km.(1-exp(-t/T).u(t) S(n+H) = S(n). aH + Km.(1-aH).u(n) S(n+H) = S(n). aH + Km.(1-aH).MV(n)")
36
PRINCIPE : CAS ÉLÉMENTAIRE
Consigne = C (constante) Trajectoire de Référence = exponentielle (décrément) INCRÉMENT DÉSIRÉ DE LA SORTIE DU PROCESSUS A L’INSTANT n+H p(n+H) = (Cons-Sp(n))*lh avec lh = 1-exp(-tech.3 .H/TRBF) = 1-lH
 Trajectoire de Référence = exponentielle (décrément) INCRÉMENT DÉSIRÉ DE LA SORTIE DU PROCESSUS A L’INSTANT n+H. p(n+H) = (Cons-Sp(n))*lh. avec lh = 1-exp(-tech.3 .H/TRBF) = 1-lH.")
37
m(n+H) = Sm(n+H) - Sm(n) = S(m) .amH + E(n).Km.(1-amH) - Sm(n)
INCRÉMENT DE LA SORTIE DU MODÈLE A L’INSTANT n+H Sm(n+H) = Smlibre(n+H) + Smforcée(n+H) m(n+H) = Sm(n+H) - Sm(n) = S(m) .amH + E(n).Km.(1-amH) - Sm(n) p(n+H) = m(n+H)
 = Smlibre(n+H) + Smforcée(n+H) m(n+H) = Sm(n+H) - Sm(n) = S(m) .amH + E(n).Km.(1-amH) - Sm(n) p(n+H) = m(n+H)")
38
(Cons-Sp(n)).(1-lH) = S(m) .amH + E(n) .Km.(1-amH) - Sm(n)
ÉQUATION DE COMMANDE (Cons-Sp(n)).(1-lH) = S(m) .amH + E(n) .Km.(1-amH) - Sm(n) D’où E(n) =[(Cons-Sp(n)).(1-lH) - S(m) .amH + Sm(n)] /Km.(1-amH) Implantation E(n) = e(n)*k0 + Sm(n).k1 k0 = lh / Km.(1-amH) k1 = 1/Km ***
).(1-lH) = S(m) .amH + E(n) .Km.(1-amH) - Sm(n) D’où E(n) =[(Cons-Sp(n)).(1-lH) - S(m) .amH + Sm(n)] /Km.(1-amH) Implantation E(n) = e(n)*k0 + Sm(n).k1. k0 = lh / Km.(1-amH) k1 = 1/Km ***")
39
RÉGIME PERMANENT Supposons qu’un régime permanent stable existe :
ERREUR DE STRUCTURE : Le modèle est toujours différent du processus : Km # Kp Tm # Tp PERTURBATION D’ÉTAT : E(n) = MV(n) + Pert(n) PROBLÈME : Est ce que Sp(n) = CONS ? Km # Kp Tm # Tp Pert # 0 (fini)
 = MV(n) + Pert(n) PROBLÈME : Est ce que Sp(n) = CONS Km # Kp Tm # Tp. Pert # 0 (fini)")
40
(Cons-Sp(n)).lh = -Sm(n) .amH + E(n) .Km.(1-amH) -Sm(n)
(Cons-Sp(n)).lh = (1-amH) .(-Sm(n) + E(n) .Km) 0 + < lh < < amH < 1 Cons = Sp(n) implique (-Sm(n) + E(n) .Km) = 0 toujours vrai… Sm(n) = E(n) .Km n infini La technique du Modèle indépendant implique naturellement une erreur de position nulle malgré des perturbation d’État et de Structure
).lh = (1-amH) .(-Sm(n) + E(n) .Km) 0 + < lh < < amH < 1. Cons = Sp(n) implique (-Sm(n) + E(n) .Km) = 0 toujours vrai… Sm(n) = E(n) .Km n infini. La technique du Modèle indépendant implique naturellement une. erreur de position nulle malgré des perturbation d’État et de. Structure.")
41
FONCTIONS DE BASE Principe : Structuration a priori de la variable manipulée Variable manipulée : MV(n) = mi.Bi (n) Base polynomiale : développement de Taylor B0(t) = t0 Bi(t) = ti 0 < = i < = i max ( fini) (Cons-Sp(n)).lh = =Sm(n) .amH + E(n) .Km.(1 – amH) -Sm(n) Les mi sont inconnus ? (e.g. 2 fonctions de base) Par superposition linéaire chaque fonction de base Bi induit une sortie Sbi connue, l’équation de commande devient :
 = t0 Bi(t) = ti. 0 < = i < = i max ( fini) (Cons-Sp(n)).lh = =Sm(n) .amH + E(n) .Km.(1 – amH) -Sm(n) Les mi sont inconnus (e.g. 2 fonctions de base) Par superposition linéaire chaque fonction de base Bi induit. une sortie Sbi connue, l’équation de commande devient :")
42
(Cons-Sp(n)).lh = Sm(n) .amH + mi .SBi(n)-Sm(n)
avec : Bi(t) SBi(t) ( Sorties de base) Donc 2 inconnues m0 et m1. On prend 2 points de coïncidence H1 et H2 et on résoud le système ci-dessus à 2 équations et 2 inconnues On obtient la variable manipulée future : MV(n+i) = mosol .B0(i) +m1sol.B1(i) On applique Mv(n) = mosol .B0(0) PROPRIÉTE On montre que si le processus est ni intégrateur ni dérivateur et si la consigne est un polynôme connu d’ordre K et si l’on prend K fonctions de base (imax =K) : Il n’y a pas d’erreur de traînage La précision ne dépend pas du “ gain ” du régulateur mais de la structuration du futur.
 SBi(t) ( Sorties de base) Donc 2 inconnues m0 et m1. On prend 2 points de coïncidence H1. et H2 et on résoud le système ci-dessus à 2 équations et 2 inconnues. On obtient la variable manipulée future : MV(n+i) = mosol .B0(i) +m1sol.B1(i) On applique Mv(n) = mosol .B0(0) PROPRIÉTE. On montre que si le processus est ni intégrateur ni dérivateur et si la. consigne est un polynôme connu d’ordre K et si l’on prend K fonctions. de base (imax =K) : Il n’y a pas d’erreur de traînage. La précision ne dépend pas du gain du régulateur mais de la. structuration du futur.")
43
PROCESSUS INSTABLE PRINCIPE DE LA DÉCOMPOSITION e H0 S1 e + H1 S2 + H2
X + H2 La commande par modèle indépendant grâce au théorème de décomposition permet de piloter des systèmes instables avec toute représentation.( H1stable / H2 prise en tendance de S2)
")
44
CONTRAINTES SUR LA COMMANDE
Prise en compte simplifiée mais suffisante : Calcul de la MV puis passage dans un limiteur (position /vitesse) Mais le modèle est calculé avec la commande appliquée : COMMANDE SANS A-COUPS … SUR DES VARIABLES INTERNES Technique du multi-régulateur Exemple FOUR de TRAITEMENT
 Mais le modèle est calculé avec la commande appliquée : COMMANDE SANS A-COUPS … SUR DES VARIABLES INTERNES. Technique du multi-régulateur. Exemple FOUR de TRAITEMENT.")
45
R2 P2 CONT K0 MV2 0K CONS R1 P1 CV MV1 MV1 si 0K SUP MV = MV2 si K0
CONS2 = CONT R2 P2 CONT K0 MV2 0K CONS R1 P1 CV MV1 SUP MV1 si 0K MV2 si K0 MV =

46
REGLAGE 1° DYNAMIQUE TRAJÉCTOIRE DE RÉFÉRENCE
COMPRÉHENSION IMMÉDIATE / DYNAMIQUE DE LA BOUCLE FERMÉE REJÉCTION DE PERTURBATION FRÉQUENCE DE COUPURE / SURTENSION

47
COMPROMIS Marge de gain 1 TRBF TRBO
DYNAMIQUE ET MARGE DE STABILITÉ SONT EN CONFLIT .. ! Marge de gain 1 TRBF TRBO

Présentations similaires







 Consolidation: tester les connaissances acquises 1 Etude de la commande du système.>")











