Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Majeure SIC Cours de Radar

2
Programme I) Introduction : historique, principes généraux, signal radar, mesures effectuées II) Détection dune cible ponctuelle (mesure distance, vitesse, angles) III) Récepteur optimal, filtrage adapté, fonction dambiguïté IV) SER et furtivité V) Equations du radar (sur bruit thermique, fouillis et cible brouilleuse) VI) Fouillis
 Introduction : historique, principes généraux, signal radar, mesures effectuées II) Détection dune cible ponctuelle (mesure distance, vitesse, angles) III) Récepteur optimal, filtrage adapté, fonction dambiguïté IV) SER et furtivité V) Equations du radar (sur bruit thermique, fouillis et cible brouilleuse) VI) Fouillis")
3
Programme (suite) VII) Notion de plot VIII) Radar BFR Doppler, VCM IX) Radar à compression dimpulsion X) Radar HFR XI) Comparaison des modes XII) Radar de poursuite XIII) Applications particulières : SAR, transhorizon (M. Enert) XIV) Introduction au traitement dantenne (M. Medinsky) Guerre électronique
 XIV) Introduction au traitement dantenne (M. Medinsky) Guerre électronique.")
4
Bureaux détudes Exercices : 3 2 créneaux : TD Traitement dantenne (M. Dulost) : 4 créneaux TD Radar passif bistatique : 4 créneaux
 : 4 créneaux TD Radar passif bistatique : 4 créneaux.")
5
Contrôle Cours sans documents (8/20) + exercices avec documents (12/20)
 + exercices avec documents (12/20)")
6
Chapitre I Introduction

7
1. Historique 2. Principe de fonctionnement 3. Le signal radar 4. Mesures effectuées 5. Éléments constitutifs 6. Matériels dans lArmée de lair et la Marine

8
1. Historique 8 mai 1904: Hulsmeyer (All) expérimente le telemobiloskop, 1911 : Gernsback (EU) en énonce les principes, 1934: David (Fr) mène les premières expériences de détection davions, 1935 : Ponte et Gutton (Fr) détectent des icebergs
 expérimente le telemobiloskop, 1911 : Gernsback (EU) en énonce les principes, 1934: David (Fr) mène les premières expériences de détection davions, 1935 : Ponte et Gutton (Fr) détectent des icebergs.")
9
1935 : premières barrières électromagnétiques bistatiques (Fr), 1939 : les radars à impulsions permettent des portées de 100km sur avion, 1940 : le réseau de radar sol (Watt) permet le gain de la bataille dAngleterre,&941 : Messerschmitt Me 110G-4 est le premier avion darmes équipé dun radar (Telefunken FUG 212). Portée 5km !

10
24 au 25 juillet 1943 : La RAF expérimente avec succès lutilisation de chaffs lors du bombardement de Hambourg. Début de la GE, Conflits Israëlo-arabe: lutilisation du même type d »appareil (Dassault) conduit au développement de lIFF. 1978 : premières images satellite de la Terre (résolution 25m !)
 conduit au développement de lIFF : premières images satellite de la Terre (résolution 25m !).")
11
Définition Dispositif de radiolocalisation : RAdio Detection And Ranging –RAdio : ondes radioélectriques, –Detection et cherche à discriminer –And Ranging : localisation et mesurer des paramètres essentiels (distance, vitesse, altitude,...).
.")
12
2. Principe (configuration bistatique) Emetteur Récepteur Echo renvoyé Diffraction Cible Courant induit Absorption Réflexion
 Emetteur Récepteur Echo renvoyé Diffraction Cible Courant induit Absorption Réflexion.")
13
2. Principe de fonctionnement Le phénomène d'écho : –Londe électromagnétique émise dans l'espace va être en partie: absorbée par l'obstacle (transformée en courant induit si l'obstacle est métallique), diffractée (en fonction de la forme de la cible et des courants induits), rétrodiffusée en direction de l'émetteur (puissance utile très faible)
, diffractée (en fonction de la forme de la cible et des courants induits), rétrodiffusée en direction de l émetteur (puissance utile très faible).")
14
2. Principe: équation propagation Nature des pertes : météorologiques dans les circuits (émission et réception) dans lexploitation de linfo par modulation de lobe
 dans lexploitation de linfo par modulation de lobe.")
15
3. Le signal radar Représentation temporelle du signal impulsionnel Émission d'un signal à la fréquence f o, pendant un temps et répété tous les T R A

16
3. Critères de choix de la fréquence d'émission propriétés de réflexion : liées au rapport longueur d'onde/hauteur des aspérités. Plus le rapport est grand, plus le phénomène de réflexion est important face au fouillis de sol ou de mer travail à haute fréquence, encombrement maximum disponible pour un gain d'antenne donné, travail à haute fréquence

17
l'affaiblissement en espace libre, travail à basse fréquence directivité à minimiser, travail à haute fréquence absorption par l'atmosphère, f 0 limitée

18
3. Compromis ! radars sol ou de surveillance aérienne sur gros porteur antenne de grandes dimensions et portée élevée augmentant le risque de rencontrer de la pluie ou du brouillard, possible (10 ou 23 cm), radars aéroportés, dimension limitée autour de la bande X ( = 3 cm), missiles, dimensions très réduites augmentation de fréquence (bande KU), compatible avec une portée plus réduite.
, radars aéroportés, dimension limitée autour de la bande X ( = 3 cm), missiles, dimensions très réduites augmentation de fréquence (bande KU), compatible avec une portée plus réduite..")
19
3. Répartition spectrale

20
3. Pourquoi un signal de type impulsionnel ? Pour mesurer le retard (et donc la distance), il faut « marquer » le signal émis en fonction du temps.
, il faut « marquer » le signal émis en fonction du temps..")
21
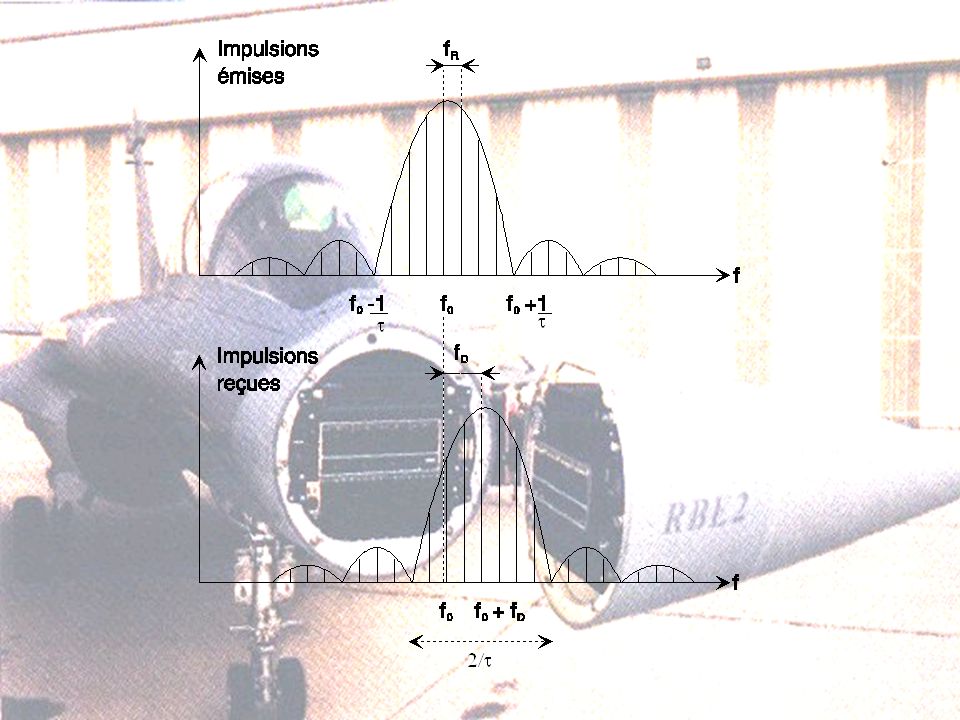
3. Spectre du signal impulsionnel Signal temporel Spectre obtenu sans calcul ! –l'impulsion rectangulaire donne un sinus cardinal s'annulant tous les 2/, –la modulation par f 0 décale le spectre de f 0, –le signal impulsionnel étant de période T R, le spectre est échantillonné à la fréquence f R

22
3. Spectre signal impulsionnel

24
fréquence d'émission f 0, longueur d'onde associée : durée de l'impulsion: période de récurrence T R, fréquence de récurrence associée amplitude du signal émis: A facteur de forme : 3. Grandeurs caractéristiques

25
puissance crête émise: (puissance émise pendant la durée d'une impulsion) puissance moyenne émise : énergie émise par impulsion: Ee = Pc
 puissance moyenne émise : énergie émise par impulsion: Ee = Pc")
26
4. Mesures effectuées par un radar Mesure en distance Mesure en vitesse radiale Localisation angulaire ( g et s ).
..")
27
4.1 Mesure de la distance Soit D la distance cible-radar Soit Tp le temps aller-retour de l'écho D =CT p /2

28
4.1 Signal reçu L'aspect triangulaire de l'enveloppe du signal reçu est significatif du traitement effectué à la réception (corrélation). T R T p Enveloppe du signal émis Enveloppe du signal reçu

29
4.2 Mesure de la vitesse radiale Effet Fizeau-Doppler : Décalage fréquenciel du fait de la vitesse radiale –Remarque :V R > 0 : l'émetteur se rapproche du récepteur

30
4.3 Mesure angulaire: principe Cible Signal reçu (site ou gisement) Signal maximal Pas dambiguïté !
 Signal maximal Pas dambiguïté !")
31
5. Éléments constitutifs d'un radar

32
5. Eléments constitutifs d'un radar 5.1 Duplexeur 5.2 Emetteur –Génère l'onde électromagnétique. –Puissances émises élevées (étages successifs) –Rendement très faible (inférieur à 50 %).
 –Rendement très faible (inférieur à 50 %)..")
33
5.2 Emetteurs radar 5.2.1. Généralités 5.2.2. Les modulateurs 5.2.3 Les sources hyperfréquences puissance

34
5.2.1 Généralités Élément qui fournit sa puissance au radar. –les émetteurs à oscillateur de puissance: énergie hyperfréquence à émettre est directement obtenue par mise en oscillation du tube de puissance, –les émetteurs à chaîne d'amplification : signal à émettre est progressivement porté à la puissance convenable par amplification dans un ou plusieurs étages (souples du point de vue possibilité de codage du signal, plus stables).
..")
35
Les 3 parties dun émetteur l'alimentation : fournit la puissance aux différents tubes, le modulateur : commande et régulation de la source hyperfréquence, la source hyperfréquence (le tube) : délivre le signal à émettre. Principe : couplage en vue dun transfert de puissance entre un faisceau délectrons et une onde électromagnétique

36
5.2.2. Les modulateurs But et fonction des modulateurs –Permettre aux tubes d'émission de fonctionner en impulsions, à partir des signaux de synchronisation –Réservoir d'énergie + commutation

37
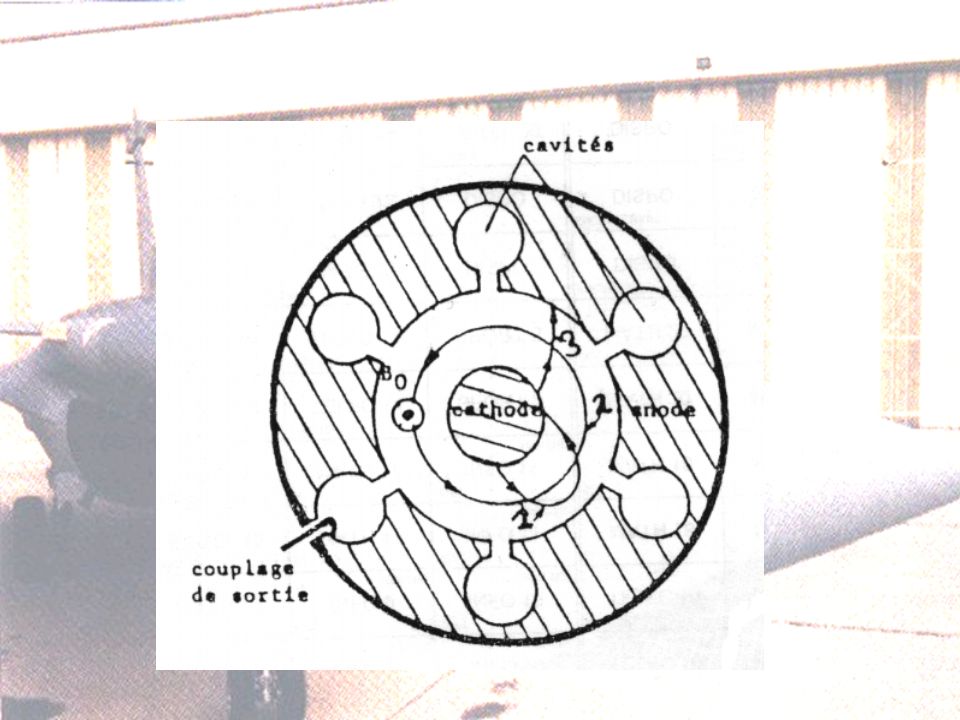
5.2.3 Les sources hyperfréquences Le Magnétron (tube à champs croisés) Principe : interaction d'un faisceau électronique et d'une onde hyperfréquence se propageant dans une structure résonnante. Un champ magnétique est appliqué parallèlement à l'axe du tube afin de courber les trajectoires des électrons émis par la cathode.

38
L'oscillation est obtenue lorsque la vitesse angulaire des électrons est telle qu'il y a résonance. Les électrons cèdent alors de leur énergie aux ondes hyperfréquences régnant dans les cavités successives. Conception simple, robuste et bon marché, Puissances crêtes de plusieurs Mégawatts Puissances moyennes de plusieurs kilowatts. Encombrement réduit

40
Radar 23 cm, Pc = 2 MW, Pm = 2 kW avec un rendement = 0,5. Impulsions : 50 ns à 10 s, avec un facteur de forme voisin de 1000. Inconvénients majeurs : –absence de cohérence donc pas de traitement Doppler (la phase n'est pas stable au cours du temps, amélioration=domaine de recherche). –fréquence d'émission fixe, donc pas d'agilité de fréquence.
. –fréquence d émission fixe, donc pas d agilité de fréquence..")
41
Le Klystron Tubes à interaction longitudinale à plusieurs cavités (4 ou 5) Robuste, puissant –gains 40, 50dB. –puissance crête de 30 MW avec une puissance moyenne de 200 kW. nécessite des hautes tensions (plusieurs centaines de kV). inconvénient essentiel : largeur de bande trop étroite (10%). rendements usuels sont de 30 à 40 %.
. inconvénient essentiel : largeur de bande trop étroite (10%). rendements usuels sont de 30 à 40 %..")
42
Le tube à onde progressive (TOP) Interaction continue (sur toute la longueur) d'une onde hyperfréquence et d'un faisceau électronique se propageant à la même vitesse le long de l'axe du tube.
 Interaction continue (sur toute la longueur) d une onde hyperfréquence et d un faisceau électronique se propageant à la même vitesse le long de l axe du tube.")
43
TOP Bande passante instantanée beaucoup plus grande (20%). Puissance crête: moyenne à élevée Rendement: faible Gain: élevé Contrainte : –vitesse de propagation axiale de l'onde voisine de celle du faisceau (inférieure à la vitesse de la lumière). –champ électrique axial pour interagir avec le faisceau électronique.
. –champ électrique axial pour interagir avec le faisceau électronique..")
44
Structure la plus simple : l'hélice = vitesse du faisceau électronique. gains 20 à 30 dB voire 60 dB. grande largeur de bande (jusqu'à 20%). coût élevé, fabrication délicate (puissances mises en jeu importantes). rendement 20 à 40 %. exemple: –radar RDI: Pm = 800 W Pc = 4 kW
. coût élevé, fabrication délicate (puissances mises en jeu importantes). rendement 20 à 40 %. exemple: –radar RDI: Pm = 800 W Pc = 4 kW.")
46
5.3 Antenne –Transducteur –Tournantes et/ou à balayage électronique. 5.4 Récepteur –Niveaux reçus très faibles (de l'ordre du picowatt), amplification et soin apporté au récepteur vis à vis du bruit.
, amplification et soin apporté au récepteur vis à vis du bruit..")
47
5.5 Traitement du signal –élimination des signaux parasites, –prise de décision "présence cible" –mesure des paramètres. 5.6 Pilote –horloge de base pour la synchronisation, l'échantillonnage... –génère l'ensemble des signaux de référence grâce à un VCO qui asservit la fréquence souhaitée à celle d'un oscillateur à quartz à très haute stabilité, très stable en fréquence, peu stable en phase boucle d'asservissement de phase (PLL, phase loop lock, boucle de phase).
..")
48
5.7 Traitement de l'information –Par calculateurs –Sur un ou plusieurs balayages d'antenne (mémorisation et moyennage des informations issues du traitement du signal) pour réaliser notamment de la poursuite (cas des stations sol) ou traiter l'IFF 5.8 Servo-mécanismes –Recopie angulaire gisement, site. –Réciproquement, à partir des informations fournies par le calculateur, commandent la position de l'antenne (ex radars de poursuite). 5.9 Système de visualisation
. 5.9 Système de visualisation.")
49
6. Différents types de radar radars de couverture aérienne (surveillance et circulation aérienne) radars de trajectographie (champ de tir, stations aérospatiales) radars météorologiques (à bord des avions de lignes) radars de navigation maritime (marine marchande radars de tir (conduite de tir)
 radars de trajectographie (champ de tir, stations aérospatiales) radars météorologiques (à bord des avions de lignes) radars de navigation maritime (marine marchande radars de tir (conduite de tir).")
50
radars dinterception ( à bord d'avions de chasse ) radars d'atterrissage radars de cartographie (navigation aérienne) cinémomètres de la police ouverture automatique des portes surveillance des locaux, etc.
 radars d atterrissage radars de cartographie (navigation aérienne) cinémomètres de la police ouverture automatique des portes surveillance des locaux, etc.")
51
6. Radars dans l'Armée de l'air Balayage mécanique –Sol Centaure, Aladin –Aéroporté RDI (2000), RDY (2000-5), Antilope (2000-N)
, RDY (2000-5), Antilope (2000-N).")
52
6. Radars dans l'Armée de l'air Balayage électronique –Sol TRS22XX, 2215, GRAVES, RAPTORS –Aéroporté RBE2

53
Radars aéroportés Antilope (2000 N et D) RDI (2000 C) RDY (2000-5) RBE2 (Rafale) CYRANO (F1 CR) Les radars de lArmée de lair
 RDI (2000 C) RDY (2000-5) RBE2 (Rafale) CYRANO (F1 CR) Les radars de lArmée de lair")
54
RADAR AEROPORTE –AIR / SOL Reconnaissance Navigation Suivi de terrain Cartographie ANTILOPE (M2000N & D) Les radars de lArmée de lair
 Les radars de lArmée de lair")
55
E3F Les radars de lArmée de lair

56
RADARS SOL –SOL /AIR Surveillance, contrôle du trafic aérien Contrôle dapproche TRS 22XX 23 cm NOSTRADAMUS Les radars de lArmée de lair

57
RADAR SOL –SOL /AIR Veille Poursuite de cible Radar de veille Caméra TV jour Caméra thermique Radar de poursuite Goniomètre IR CROTALE NG Les radars de lArmée de lair

58
GRAVES( Grand Réseau Adapté à la VEille Spatiale ) –Trajectographie de satellites et débris spatiaux (1000km, 10cm) Les radars de lArmée de lair
 –Trajectographie de satellites et débris spatiaux (1000km, 10cm) Les radars de lArmée de lair")
59
Système Horizon : Hélicoptère d'Observation et Radar d'Investigation de Zone senseur destiner à assister l'artillerie dans l'identification de véhicules mobiles à combattre. La plate-forme utilisée est l'hélicoptère AS-532UL Cougar d'Eurocopter Les radars de lArmée de terre Radar Horizon

60
Les radars de la MarineLes navires: Charles de Gaulle ARABEL antenne radar à balayage électronique 2D Détection + confirmation + poursuite des cibles Radar multifonction en bande X (I à J) de portée 100 km: radar de contrôle de tir pour SAAM Transmission données de trajectographie via transmetteur liaison montante au missile Aster avant verrouillage de la cible
 de portée 100 km: radar de contrôle de tir pour SAAM Transmission données de trajectographie via transmetteur liaison montante au missile Aster avant verrouillage de la cible")
61
Les radars de la MarineLes navires: Charles de Gaulle DRBJ 26 D Jupiter Radar 2D de veille longue portée: portée de plus de 350 km sur un chasseur Émetteurs état solide à 32 modules Bande D

62
Les radars de la MarineLes navires: Charles de Gaulle DRBV 15C Sea Tiger Mk2 Radar 2D: Surveillance espace aérien et surface Désignation des cibles pour les systèmes darmes 2 vitesses de rotation dantenne: lutte anti-missile ( 30 t/min) et surveillance (15 t/min)
 et surveillance (15 t/min)")
63
Les radars de la MarineAvions E2C Hawkeye Radar doppler bande UHF haute puissance Triple TR: pas de zone aveugle Portée accrue au-delà de lhorizon Atlantique 2 (radar Iguane) Falcon 10 Gardian (radar Varan) Falcon 50
 Falcon 10 Gardian (radar Varan) Falcon 50")
64
Les radars de la Marine Crusader Etendard IV Falcon 50 Super Etendard Rafale

65
Fin

66
Les radars de la MarineHélicoptères Lynx Dauphin Radar Super Frelon

67
Les radars de la MarineMissiles Aster Tartar Crotale

68
Les radars de la MarineMissiles: Poids735 kg Charge165 kg VitesseMach 1 Portée42 km Longueur5,20 m Diamètre0,35 m Envergure1 m Exocet MM40 Exocet SM 39

69
Les radars de la MarineMissiles: MICA MICA IR Masse112 kg Longueur3.10 m Diamètre0.16 m Auto-directeur (2)EM actif ou imageur IR passif Portéede moins de 500 m à plus de 60 km
EM actif ou imageur IR passif Portéede moins de 500 m à plus de 60 km")
70
1. Historique

Présentations similaires








 < signal cible …Pourquoi.>")
 : Le laser..>")










