Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Les courantomètres de coque Théorie et applications
Christophe Vrignaud (SHOM 2009)
")
2
I. Acoustique II. Doppler Current III. Profiler IV. Vessel Mounted

3
Références: Acoustic Doppler Current Profiler – Principles of Operation – A practical Primer – Second Edition for BroadBand ADCP, 1996 RDInstruments. Schlitzer, R., Ocean Data View, Lurton X. An Introduction To Underwater Acoustics – Principles and Applications, Springer-Verlag, Berlin (2002) - New edition at the end of 2009
 - New edition at the end of")
4
I. Acoustique II. Doppler Current III. Profiler IV. Vessel Mounted

5
Effet piézo-électrique
Signal électrique La piézoélectricité est la propriété de certains corps de se polariser électriquement sous l’action d’une contrainte mécanique et à l’inverse de se déformer lorsqu’on leur applique un champ électrique. Les deux effets sont indissociables. L’effet piézoélectrique direct un signal acoustique « frappant » ce matériau est transformé en énergie électrique. L’effet piézoélectrique inverse Une stimulation électrique sur ce matériau est convertie en énergie mécanique. ( Effet piezo direct) Transducteur Milieu élastique Signal Mécanique (Onde acoustique) ( Effet piezo inverse)
 Transducteur. Milieu élastique. Signal Mécanique. (Onde acoustique) ( Effet piezo inverse)")
6
Notion de transducteur
+ + + + + + + + + + + + Tr1 + + Tr2 + + + + + + Ondes destructives et constructives pour une antenne de 2 transducteurs Transducteur élémentaire (élément sondeur multifaisceau Kongsberg EM120) Transmission du maximum d’énergie pour une antenne de deux transducteurs.
 Transmission du maximum d’énergie pour une antenne de deux transducteurs.")
7
Antenne acoustique et Diagramme de directivité
Le concept de l’antenne linéaire peut être étendu dans les deux dimensions combinaison de transducteurs élémentaire sous la forme d’une antenne diagramme de directivité d’une antenne circulaire (Eckart, 1968) Antenne Monofaisceau EA400 (Kongsberg Maritime)
 Antenne Monofaisceau EA400 (Kongsberg Maritime)")
8
Exemple de diagramme de directivité du courantomètre à effet Doppler, en émission, pour le transducteur n°1 d’un WorkHorse 300kHz Teledyne-RDInstruments – Calibrage en bassin IFREMER-SHOM.

9
Dépointage des faisceaux en émission
Antenne Tr.1 Tr.2 Emission à 0° Émission simultané des transducteur élémentaire: énergie maximale transmise perpendiculaire à l’antenne. Tr.1 Tr.2 Emission à θ θ Pour émettre vers une direction particulière on peut orienter l’antenne perpendiculairement à cette direction. d Tr.1 Tr.2 Emission dépointée à θ d.sinθ θ Sans bouger l’antenne il est possible de « dépointer » l’émission dans une direction θ. Comme si le transducteur 1 était déplacé de la distance d.sin (en pratique le transducteur 2 émet avec un retard de: « d.sinθ /C »

10
Emission dépointée à θ: - puissance émise maximale dans la direction θ
Retard = d.sinθ/C Retard = 2d.sinθ/C Emission à T0 Retard = (N-1).d.sinθ/C Tr.1 d Tr.2 Tr.3 Tr.N d.sinθ θ Emission dépointée à θ: - puissance émise maximale dans la direction θ - Déplacement du front d’onde dans la direction θ
.d.sinθ/C. Tr.1. d. Tr.2. Tr.3. Tr.N. d.sinθ. θ. Emission dépointée à θ: - puissance émise maximale dans la direction θ. - Déplacement du front d’onde dans la direction θ.")
11
Dépointage des faisceaux en réception
Tr. N d Tr.3 Tr.2 Tr.1 θ

12
Pertes par propagation acoustique 1/2
Pertes par divergence géométrique La propagation d’une onde acoustique depuis une source correspond à un étalement de l’énergie acoustique émise sur une surface sphérique (S=4.π.R2) croissante (dispersion volumique) Par conservation de l’énergie, l’intensité décroît en 1/R2 Perte d’énergie en dB, référencée à 1m de la source: 20logR Source R
 croissante (dispersion volumique) Par conservation de l’énergie, l’intensité décroît en 1/R2. Perte d’énergie en dB, référencée à 1m de la source: 20logR. Source. R.")
13
Pertes par propagation acoustique 2/2
Pertes par amortisement (absorption) Le milieu de propagation et dissipatif. Cette absorption de l’onde sonore est le facteur le plus limitatif de la propagation acoustique Le facteur d’amortissement est fonction (entre autres) de la fréquence d’émission et du milieu. (Plus la fréquence augmente, plus l'amortissement est important..) Perte d’énergie de la forme α.R - avec α le facteur d’amortissement, fonction de la fréquence en dB/m - α augmente avec la fréquence.
 Le milieu de propagation et dissipatif. Cette absorption de l’onde sonore est le facteur le plus limitatif de la propagation acoustique. Le facteur d’amortissement est fonction (entre autres) de la fréquence d’émission et du milieu. (Plus la fréquence augmente, plus l amortissement est important..) Perte d’énergie de la forme α.R - avec α le facteur d’amortissement, fonction de la fréquence en dB/m - α augmente avec la fréquence.")
14
Pertes d’énergie lors de la diffusion d’un signal : PT = 20logR + αR.
Exemple: Absorption du son dans l’eau en fonction de la fréquence et de la salinité (d’après Francois et Garrison, 1982). Pertes d’énergie lors de la diffusion d’un signal : PT = 20logR + αR.
. Pertes d’énergie lors de la diffusion d’un signal : PT = 20logR + αR.")
15
Pertes par bulles d’air
Dans certaines circonstances, des bulles d’air générées sur l’étrave du navire peuvent perturber le fonctionnement du système en passant sous les transducteurs. L’émission acoustique s’en trouve ainsi perturbée. L’atténuation du signal acoustique sera d’autant plus élevée que : Les conditions météo sont mauvaises ; L’immersion des transducteurs est faible ; La fréquence d’émission est élevée. Données IFREMER - Thalassa

16
I. Acoustique II. Doppler Current III. Profiler IV. Vessel Mounted

17
L'effet Doppler (avec C la célérité du son dans le milieu)
En pratique: un signal de fréquence fixe, émis par une source en mouvement, sera perçu par un observateur immobile avec une fréquence décalée. Cet écart entre la fréquence du signal émis et la fréquence du signal reçu est directement lié à la vitesse relative de la source par rapport au récepteur. Ce principe est valable en acoustique, en optique ou en électromagnétique. En théorie: pour un signal émis à la fréquence F par un émetteur ayant une vitesse Vo, le signal reçu par un récepteur immobile aura une fréquence F’ définie comme suit: (avec C la célérité du son dans le milieu)
")
18
Application à la courantomètrie
Certains appareils utilisent l'effet Doppler pour mesurer la vitesse du courant marin. Ce sont les courantomètres à effet Doppler. Ces systèmes mesurent en réalité la vitesse de déplacement de matières en suspension. N'ayant pas de mouvement propre, ou alors négligeable devant la vitesse du courant, le déplacement de ces particules traduit donc la vitesse du courant marin. 1mm Exemple de zooplancton : famille des copépodes pélagiques – d’après Giesbrecht (pelagischen copepoden des golfes von Neapel -1892) – taille réelle : quelques millimètres.
 – taille réelle : quelques millimètres.")
19
F F’ Vo Principe de mesure (diffuseurs en mouvement)
Émission à la fréquence F Diffuseurs en mouvement, à la vitesse Vo, vers le transducteur. Réception par les diffuseurs à la fréquence F’ (effet Doppler) F F’ Vo
 F. F’ Vo.")
20
F F’’ F’ Vo Principe de mesure (diffuseurs en mouvement)
Émission à la fréquence F Diffuseurs en mouvement à la vitesse Vo vers le transducteur. Réception par les diffuseurs à la fréquence F’ (effet Doppler) Transmission par les diffuseurs à la fréquence F’’ (double effet Doppler) F F’’ F’ Vo
 Transmission par les diffuseurs à la fréquence F’’ (double effet Doppler) F. F’’ F’ Vo.")
21
I. Acoustique II. Doppler Current III. Profiler IV. Vessel Mounted

22
Fonctionnement du courantomètre à effet Doppler
Distance au transducteur Diffuseur à D D = (C.t1)/2 temps Émission à 0 Réception à t1
/2. temps. Émission à 0. Réception à t1.")
23
Propagation du signal dans la colonne d’eau
Distance Propagation du signal dans la colonne d’eau Les phases successives d’écoutes définissent des cellules dans la colonne d’eau 4e couche La colonne d’eau est découpée en couches qui se recouvrent 3e couche 2e couche 2ième mesure 1ere couche 1ere mesure t0 t1 temps t2 t3 t4 t5 t6 Phase d’émission Phases de Réceptions « blanc »

24
Deux types d’émissions
Système SABRINA (IFREMER) sur NO Pourquoi Pas? « NarrowBand » Le signal émis est un sinusoïdale, à une fréquence fixe (“ping”). Pour chaque cellule, le décalage en fréquence est déterminé à partir du spectre du signal reçu correspondant à la séquence d'écoute. Connaissant la fréquence d'émission initiale et la fréquence du signal retour, on détermine ainsi la vitesse des diffuseurs dans l’axe du transducteur. VM-ADCP 38kHz: signal d’émission – en temps VM-ADCP 38kHz: signal d’émission - en fréquence Harmonique 114kHz Harmonique 76kHz Harmonique 152kHz
 sur NO Pourquoi Pas « NarrowBand » Le signal émis est un sinusoïdale, à une fréquence fixe ( ping ). Pour chaque cellule, le décalage en fréquence est déterminé à partir du spectre du signal reçu correspondant à la séquence d écoute. Connaissant la fréquence d émission initiale et la fréquence du signal retour, on détermine ainsi la vitesse des diffuseurs dans l’axe du transducteur. VM-ADCP 38kHz: signal d’émission – en temps. VM-ADCP 38kHz: signal d’émission - en fréquence. Harmonique 114kHz. Harmonique 76kHz. Harmonique 152kHz.")
25
Deux types d’émissions
« BroadBand » Le signal émis est une succession de codes (signaux “PSK” Phased Shift Keying) Un signal pseudo aléatoire est dupliqué plusieurs fois dans la phase d’émission de l’ADCP (le nombre de signaux dépend de la longueur de la cellule choisie par l’utilisateur Signal pseudo aléatoire de 4 ou 6 codes élémentaires suivant les modèles. Répétition d’au moins 2 messages Élément de code 2ième copie Code Signal utile
 Un signal pseudo aléatoire est dupliqué plusieurs fois dans la phase d’émission de l’ADCP (le nombre de signaux dépend de la longueur de la cellule choisie par l’utilisateur. Signal pseudo aléatoire de 4 ou 6 codes élémentaires suivant les modèles. Répétition d’au moins 2 messages. Élément de code. 2ième copie. Code. Signal utile.")
26
Détermination de la compression Doppler par méthode d’autocorrélation
Emission (3 codes) Réception (dilatation) dT 2.dT T T+dT
 Réception (dilatation) dT. 2.dT. T. T+dT.")
27
VM-ADCP 38kHz: signal d’émission – en temps
VM-ADCP 38kHz: signal d’émission - en fréquence « BroadBand » Le spectre d’émission d’un signal PSK est très large (BroadBand = Large Bande). Les interférences sur d’autres sondeurs peuvent alors apparaître. Harmonique 152kHz Harmonique 114kHz Harmonique 76kHz
. Les interférences sur d’autres sondeurs peuvent alors apparaître. Harmonique 152kHz. Harmonique 114kHz. Harmonique 76kHz.")
28
Projection dans un repère terrestre
Pour chaque base acoustique et pour chaque cellule on peut déterminer une composante de vitesse dans l’axe du transducteur. Avec au moins 3 bases on peut déterminer les composantes d’un vecteur vitesse dans un repère orthonormé lié à l’appareil. Une quatrième base peut être utilisée pour obtenir une estimation de l’erreur faite sur la mesure. Des capteurs internes (roulis et tangage) permettent de connaître l'inclinaison du courantomètre durant la mesure et ainsi de redistribuer correctement chaque composante du vecteur vitesse à la bonne distance. Un compas interne permet au final de projeter les mesures dans un repère terrestre.
 permettent de connaître l inclinaison du courantomètre durant la mesure et ainsi de redistribuer correctement chaque composante du vecteur vitesse à la bonne distance. Un compas interne permet au final de projeter les mesures dans un repère terrestre.")
29
Projection dans un repère terrestre (cas de RDI)
Vitesses brutes mesurées par l’appareil le long des 4 transducteurs: Vitesses mesurées par l’appareil dans un repère orthonormé lié à l’appareil : ( e = « erreur velocity » - système surdéterminé) Vitesses mesurées par l’appareil dans un repère orthonormé terrestre : (en tenant compte des informations Roll, Pitch et Heading)
 Vitesses mesurées par l’appareil dans un repère orthonormé terrestre : (en tenant compte des informations Roll, Pitch et Heading)")
30
Paramètres de configuration
Une seule émission acoustique permet d’obtenir un profil vertical du courant dans un repère terrestre. En pratique on peut effectuer une mesure avec plusieurs émissions, en ne conservant que la valeur moyenne des vitesses mesurées. La vitesse mesurée pour chaque cellule correspond à la vitesse moyenne du courant sur cette cellule. « blanking distance » Taille des cellules Nombre de cellules Nombre de « ping » par ensemble Temps entre chaque ping Temps entre chaque ensemble « bottom track » (RDI) ; ****** Commandes Broadband ******* ; choix du mode broadBand (1 = Yes, 0 = No et invalide les commandes liées au BB): WP1 ; Nombre de cellules: WN70 ; Taille des cellules en cm: WS0400 ; Distance aveugle en cm: WF0400 ; Emission d'un "bottom ping" (1 = Yes, 0 = No): BP0 ; Synchro CXa,b (trigg externe: a=1 sinon a=0) acquitement: b = 1 sinon b=0): CX1,1
 ; ****** Commandes Broadband ******* ; choix du mode broadBand (1 = Yes, 0 = No et invalide les commandes liées au BB): WP1. ; Nombre de cellules: WN70. ; Taille des cellules en cm: WS0400. ; Distance aveugle en cm: WF0400. ; Emission d un bottom ping (1 = Yes, 0 = No): BP0. ; Synchro CXa,b (trigg externe: a=1 sinon a=0) acquitement: b = 1 sinon b=0): CX1,1.")
31
La zone réellement utile est Hcosθ
Dans certaines conditions, les lobes secondaire peuvent perturber les mesures. La zone réellement utile est Hcosθ Pour θ = 30° H(1-cosθ)= 13%H Lobe principale H cosθ H θ Lobe secondaire Zone polluée par les lobes secondaires Fond
= 13%H. Lobe principale. H cosθ. H. θ. Lobe secondaire. Zone polluée par les lobes secondaires. Fond.")
32
Paramètres mesurés Pour chaque cellule: Courant (intensité direction)
Echo rétrodiffusé Corrélation (RDI) Erreur (error velocity chez RDI) Pour chaque profil (ou ensemble): Date et heure Attitude Tension batterie Pression (si capteur) Position (si capteur) … autres suivant marques et modèles.
 Erreur (error velocity chez RDI) Pour chaque profil (ou ensemble): Date et heure. Attitude. Tension batterie. Pression (si capteur) Position (si capteur) … autres suivant marques et modèles.")
33
Notions d’exactitude et de portée
Fréquence d'émission (kHz) Portée moyenne (m) Taille des cellules à 16m à 8m à 4m à 2m à 2m ,5m NarrowBand fréquence Taille de cellule (m) Ecart-type (cm/s) pour 1 ping Ecart-type (cm/s) pour 30 ping 38 kHz 16 30 5,4 150 kHz 4 BroadBand fréquence Taille de cellule (m) Ecart-type (cm/s) pour 1 ping Ecart-type (cm/s) pour 30 ping 38 kHz 16 12 2,2 150 kHz 4
 Portée moyenne (m) Taille des cellules à 16m à 8m à 4m à 2m à 2m ,5m. NarrowBand. fréquence. Taille de cellule (m) Ecart-type (cm/s) pour 1 ping. Ecart-type (cm/s) pour 30 ping. 38 kHz , kHz. 4. BroadBand. fréquence. Taille de cellule (m) Ecart-type (cm/s) pour 1 ping. Ecart-type (cm/s) pour 30 ping. 38 kHz , kHz. 4.")
34
Quelques courantomètres
Teledyne-RDInstruments, Ocean Surveyor 38kHz – système à formation de 4 voies, composé de matrices de transducteurs élémentaires. Portée moyenne : 900m ; Taille typique des cellules : 16m à 24m ; Dimension : diamètre de 91cm ; Ouverture angulaire d’un faisceau : 2.60°. Link-Quest Inc, FlowQuest 150kHz Portée moyenne : 500m ; Taille typique des cellules : 2m à 16m ; Dimension : diamètre de 40cm ; Ouverture angulaire d’un faisceau : X.XX°. Teledyne-RDInstruments, Ocean Surveyor 150kHz – système à formation de 4 voies, composé de matrices de transducteurs élémentaires. Portée moyenne : 300m ; Taille typique des cellules : 4m à 8m ; Dimension : diamètre de 30cm ; Ouverture angulaire d’un faisceau : 2.92°. Teledyne-RDInstruments, Horizontal-ADCP 300kHz. Portée moyenne : 250m ; Taille typique des cellules : 4 à 8m ; Dimension de la tête : 73cm de large, 46cm de haut ; Ouverture angulaire d’un faisceau : 1,2°. Nortek AS, AWAC 600kHz – 1 transducteur dédié à la détection de surface. Portée moyenne : 50m ; Taille typique des cellules : 0.5 à 8m ; Dimension de la tête : 21cm de diamètre, 19cm de haut ; Ouverture angulaire d’un faisceau : X.XX°. Teledyne-RDInstruments, ADCP Sentinel 1200kHz. Portée moyenne : 20m ; Taille typique des cellules : 0.25 à 2m ; Dimension : 23cm de diamètre et 40cm de haut environ ; Ouverture angulaire d’un faisceau : 1,4°. Nortek AS, Aquadopp Profiler 2000kHz. Portée moyenne : 6m ; Taille typique des cellules : 0.1m à 2m ; Dimension : diamètre de 7.5cm et 56cm de long ; Ouverture angulaire d’un faisceau : 1,7°.

35
Utilisation en SC-ADCP (WorkHorse 300kHz) – Ensemble de Mesures (60j)
Zoom sur 5 jours

36
Vecteurs courant de surface sur 20 jours
Zoom sur 5 jours Vecteurs courant de surface sur 20 jours

37
Veine d’eau méditerranéenne
Utilisation en L-ADCP (BroadBand 150kHz) – Exemple de SEMANE Veine d’eau méditerranéenne V U
 – Exemple de SEMANE. Veine d’eau méditerranéenne. V. U.")
38
Vecteurs courant à 1000m de profondeur
coupe verticale de l’intensité du courant Veine d’eau méditerranéenne Afrique Europe

39
I. Acoustique II. Doppler Current III. Profiler IV. Vessel Mounted

40
Principe du VM-ADCP Le courantomètre à effet Doppler est inséré sous la coque d'un navire. Les bases acoustiques insonifient ainsi la couche superficielle de l'océan. Les mesures sont réalisées au cours des déplacements du navire ou sur un point fixe. La partie importante du traitement des données consiste à s'affranchir des perturbations causées par les mouvements propres du navire (roulis, tangage, vitesse navire…). Ce traitement se fait en temps réel. Il n’y a pas de calcul de «chemin acoustique» (contrairement aux SMF)
. Ce traitement se fait en temps réel. Il n’y a pas de calcul de «chemin acoustique» (contrairement aux SMF)")
41
Génération Narrow Band
BO D'Entrecasteaux: RDI NarrowBand 75kHz et 300kHz. Utilisé de 1994 à 2002

42
Système: VM-ADCP Ocean Surveyor
38kHz and 150kHz Beautemps Beaupré (95% SHOM – 5% IFREMER) Mise en place de la base 38 kHz Bases 38 kHz et 150 kHz après mise en place des fenêtres acoustiques Pourquoi Pas? (45% SHOM – 55% IFREMER)
 Mise en place de la base 38 kHz. Bases 38 kHz et 150 kHz. après mise en place des fenêtres acoustiques. Pourquoi Pas (45% SHOM – 55% IFREMER)")
43
Implantation des transducteurs sous la gondole
Implantation des transducteurs sous la gondole. Exemple du Beautemps-Beaupré (puit d’eau de mer) 13 m 9 m 43
 13 m. 9 m. 43.")
44
Pénétrateur de Sédiments
Implantation des transducteurs sur la gondole Exemple du « Pourquoi Pas? » (puit d’eau douce) EA kHz EA kHz Sondeur navigation Seabat 7150 Tx 12 kHz 8,5 m EA kHz Proue (vue de dessus) DVL 1200 kHz Hydrophone Sabrina ADCP 150 kHz Seabat 7150 Tx 24 kHz Pénétrateur de Sédiments ADCP 38 kHz Seabat 7150 Rx 12,3 m
 EA kHz. EA kHz. Sondeur navigation. Seabat Tx 12 kHz. 8,5 m. EA kHz. Proue. (vue de dessus) DVL 1200 kHz. Hydrophone Sabrina. ADCP 150 kHz. Seabat Tx 24 kHz. Pénétrateur de Sédiments. ADCP 38 kHz. Seabat 7150 Rx. 12,3 m.")
45
Depuis juin 2009: Atalante (IFREMER)
… Image IFREMER

46
Specifications techniques et montage
Beam 1 Beam 3 Beam 4 Beam 2 caractéristique du repère lié au navire (exemple du Pourquoi Pas ?)
")
47
(VMDas, BBtalk, WinADCP)
Le système VM-ADCP Trigger IN Centrale d’attitude ( et de cap) Trigger OUT Deckbox (firmware) Gyro Positionnement Câble transducteur Antenne PC d’acquisition (VMDas, BBtalk, WinADCP) Réseau bord Eau douce ou salée Fenêtre acoustique
 Trigger OUT. Deckbox. (firmware) Gyro. Positionnement. Câble transducteur. Antenne. PC d’acquisition. (VMDas, BBtalk, WinADCP) Réseau bord. Eau douce ou salée. Fenêtre acoustique.")
48
Centrale d’attitude et navigation
Les informations de navigation hybridées sont transmises par la PHINS au format NMEA/GGA et/ou VTG Les informations d’attitude sont transmises par la PHINS au format PRDID (ou Simrad EM) GGA: hhmmss.ss,LatN,LonE,QF,NumSat, … $PHGGA, , ,N, ,E,2,07, , ,M, ,M, ,0240*63 $PHVTG, ,T, ,M, ,N, ,K,D*28 $HEHDT, ,T*22 $PASHR, ,320.91,T,+0.06,+0.40,+0.01,0.015,0.016,0.028,1,0*3D PRDID: Roll, Pitch , Heading) $PRDID, , ,055.05 $PRDID, , ,055.04 $PRDID, , ,055.04 $PRDID, , ,055.06 $PADCP,1, ,
 GGA: hhmmss.ss,LatN,LonE,QF,NumSat, … $PHGGA, , ,N, ,E,2,07, , ,M, ,M, ,0240*63 $PHVTG, ,T, ,M, ,N, ,K,D*28 $HEHDT, ,T*22 $PASHR, ,320.91,T,+0.06,+0.40,+0.01,0.015,0.016,0.028,1,0*3D. PRDID: Roll, Pitch , Heading) $PRDID, , , $PRDID, , , $PRDID, , , $PRDID, , , $PADCP,1, ,")
49
Synchronisation Limite de la synchronisation: Mesures d’attitude
- Datation et positionnement Ordre de tir de la synchro ADCP prêt à pinger Réception des données par le PC Temps Intégration des données d’attitude et moyennage : attribution de la valeur calculée au profil Ordre de tir de la synchro ADCP prêt à pinger Réception des données par le PC Temps Datation du futur profil

50
Acquisition Traitement WinADCP Exploitation VM-ADCP (Ocean Surveyor)
Centrale d’attitude (M-PHINS) GPS (Aquarius) Acquisition Synchronisation PC: Logiciel VMDas Traitement Fichiers binaires (.LTA, .STA) Transmission vers “CORIOLIS data center” en temps reel WinADCP Fichier ASCII ou MATfile CASCADE Exploitation Ocean Data View Fichier NetCDF
 GPS (Aquarius) Acquisition. Synchronisation. PC: Logiciel VMDas. Traitement. Fichiers binaires (.LTA, .STA) Transmission vers CORIOLIS data center en temps reel. WinADCP. Fichier ASCII ou MATfile. CASCADE. Exploitation. Ocean Data View. Fichier NetCDF.")
51
VMDas Configuration, acquisition, traitement et visualisation en temps réel Configuration de VMDas adaptée au porteur:

52
Fichier en sortie de VM-DAS

53
CASCADE v5.2 Exploitation scientifique (filtrages…) et mode de représentation (cartes, radiales, vecteurs…)
 et mode de représentation (cartes, radiales, vecteurs…)")
54
Campagne OPTIC-CONGO - mars 2005 au large du GABON
Campagne OPTIC-CONGO - mars 2005 au large du GABON. Exemple de la Radiale « OGOOUE » ADCP 150kHz – vitesses moyennées sur 2min

55
150kHz 38kHz Comparaison des vitesses ADCP 150kHz et 38kHz (normes)
(moyennées sur 2min - reportées sur les longitudes) 150kHz 38kHz
 150kHz. 38kHz.")
56
7h 19h Journée 150kHz Deep Scattering Layer 38kHz
Comparaison ADCP- 150kHz et 38kHz – Echo Intensity (moyennées sur 2min - reportées sur les longitudes) 19h 7h Journée 150kHz Deep Scattering Layer 38kHz
 19h. 7h. Journée. 150kHz. Deep Scattering Layer. 38kHz.")
57
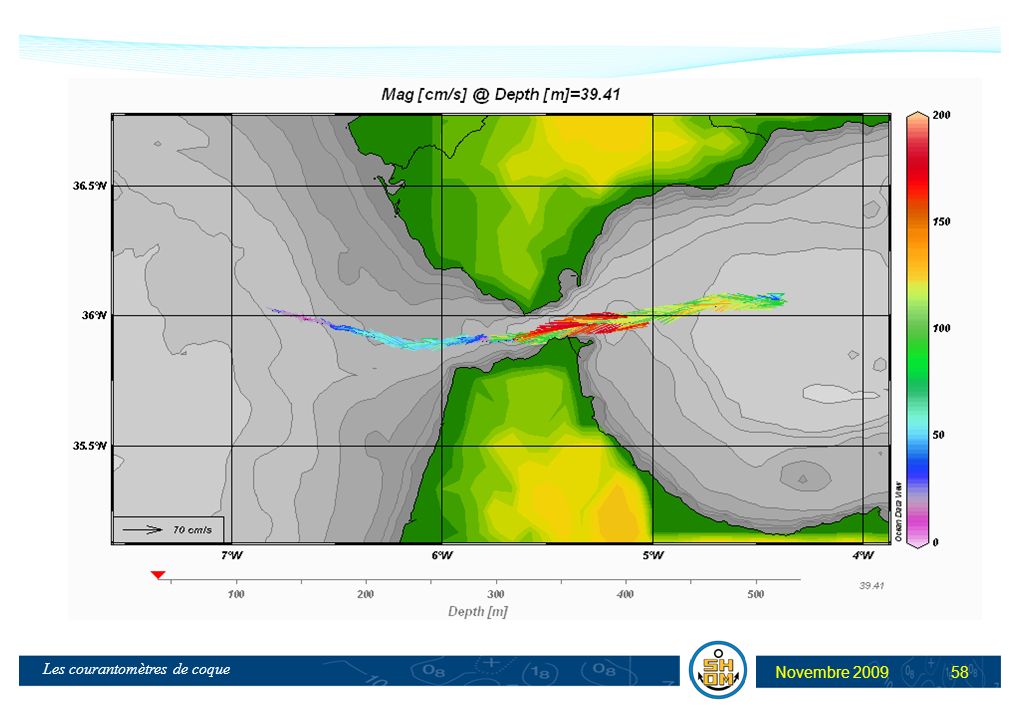
Détroit de Gibraltar ADCP 38kHz

59
Mesures au point fixe 1,5j (section temporelle) – MOUTON 2005
 – MOUTON 2005")
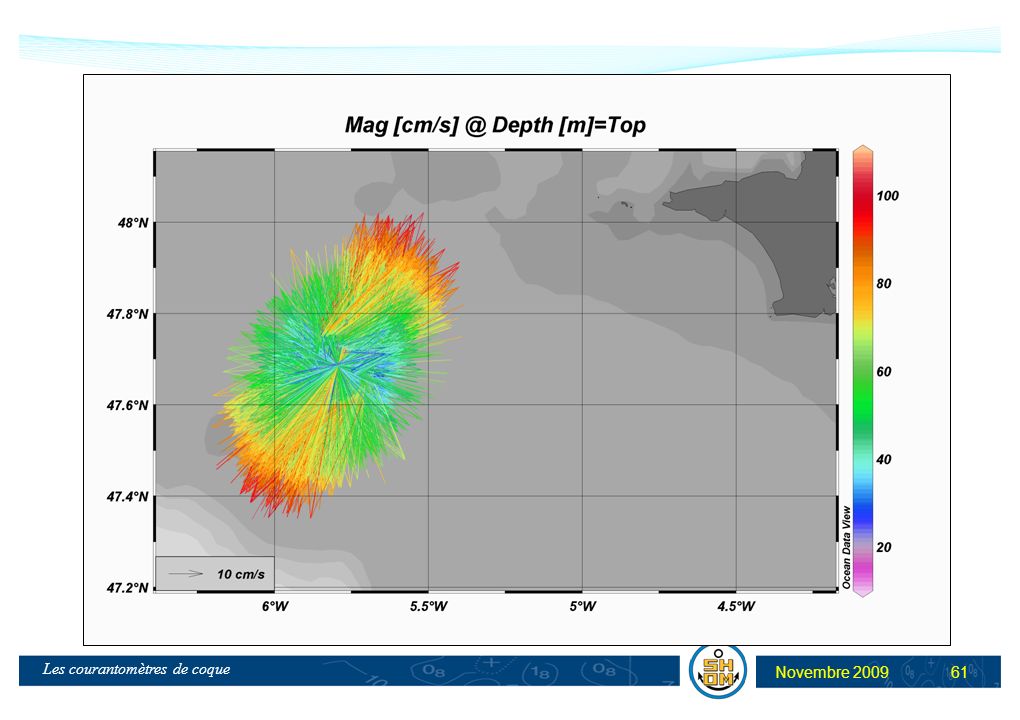
60
Mesures au point fixe

62
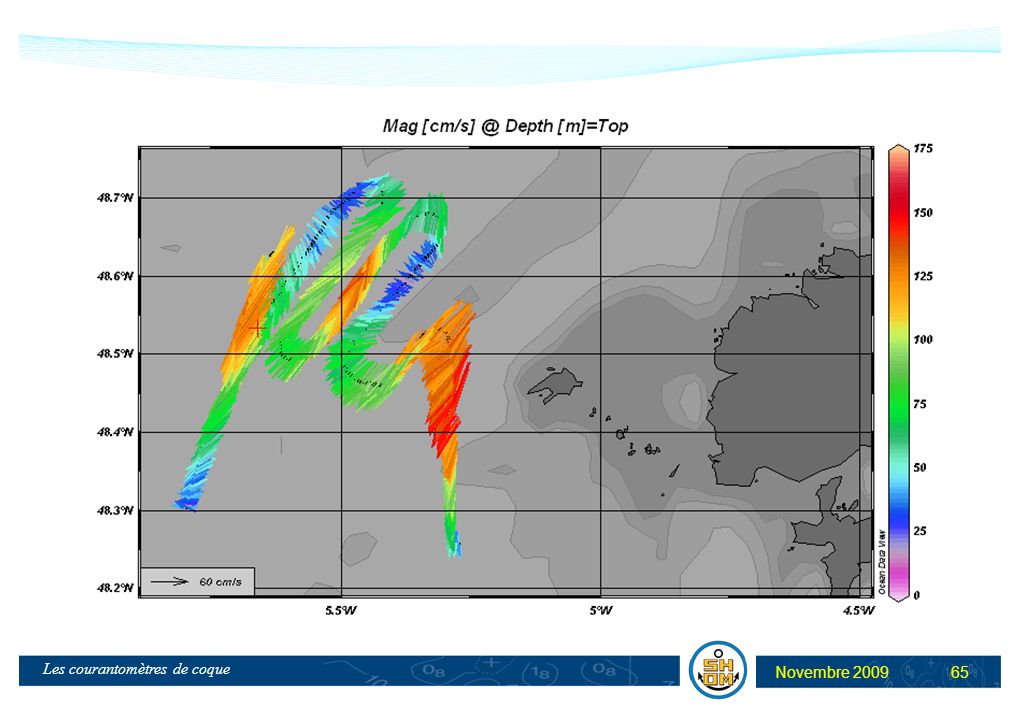
Mesures en route (section temporelle) – MOUTON 2005
 – MOUTON 2005")
63
Effets des Lobes Secondaires
Les courants proches du fond traduisent la vitesse et la direction du porteur

64
Mesures en route (animation en fonction du temps)
")
66
Erreur d’alignement EA après SAT en 2002: 44.4635°
EA 2007 après tests: 44.10°

67
L’absence de synchronisation
Exemple d'interférence du SBP 120 sur l'OS 150kHz Exemple d'interférence de l'EA400 sur l'OS 38kHz

68
Interférences à partir de 1000m
La synchronisation 200m 100m Interférences à partir de 1000m Interférence de 100m de hauteur à 200m en moyenne. Durée de l’interférence: 100m/1500 = 66ms Temps d’émission de l’interférence 200m/1500/2 = 66ms Interférences Signal « fond »

69
Le bruit electrique (exemple Pourquois pas?) ADCP 38kHz - Correlation
Propulseurs sur OFF – Portée nominale jusqu’à 1000m environ Propulseur 3, pas 0 - Portée jusqu’à 750m environ. Propulseur 1, pas 0 - Portée jusqu’à 550m environ.

70
Les bulles d’air mer 5, vent à 30nds et houle face au navire: effets de bullage sur les sondeurs VM-ADCP sur la gondole.

71
Perte de données (effet “biologique”)
Magnitude BroadBand – 38kHz Echo Intensity Magnitude NarrowBAnd– 38kHz

72
Ringing Vitesse de la première cellule à 2m/s (= vitesse navire)
Magnitude Vitesse de la première cellule à 2m/s (= vitesse navire) Correlation Echo Intensity
 Correlation. Echo Intensity.")
73
Doppler Velocity Loch ADCP type WorkHorse 1200kHz.
Water Profiling + Bottom ping + Water Mass Intégration sur AUV Daurade Sur Pourquoi Pas ?

74
Le Doppler Velocity Loch : Navigation d’un AUV
GPS positions Mouvement relatif du fond (ou du fluide)
")
75
Le Doppler Velocity Loch
Cadence : 4 tirs / s Un tir de Bottom Track Si le fond n’est pas en portée: un tir de Water track Un tir de Water profil

76
Real time Navigation processing
PD6 is waiting to process navigation with Bottom Track and water Mass pings PD6 sent to the Motion Unit PD6 export from PD0 Incompatibility for navigation PD0 send from DVL PD0 should be choosen to keep water profils

77
Water current post-processing
No Navigation and Depth data logged in PD0 file PD0 with water Profils New PD0 with Depth, navigation and attitude data DVL2PDO tool Pressure sensor Pitch, roll, heading, position, depth values processed by the Motion Unit

78
Doppler Velocity Loch with ADCP Option
Water Profil – Raw Data – No Bottom Track Navigation SURMINE Mission in the bay of Seine – February 2009 – Mines Hunting Survey Water Profil – Raw Data – NoBottom Track Navigation

79
ODV : Without depth correction - no positions
ODV : With depth correction + positions

80
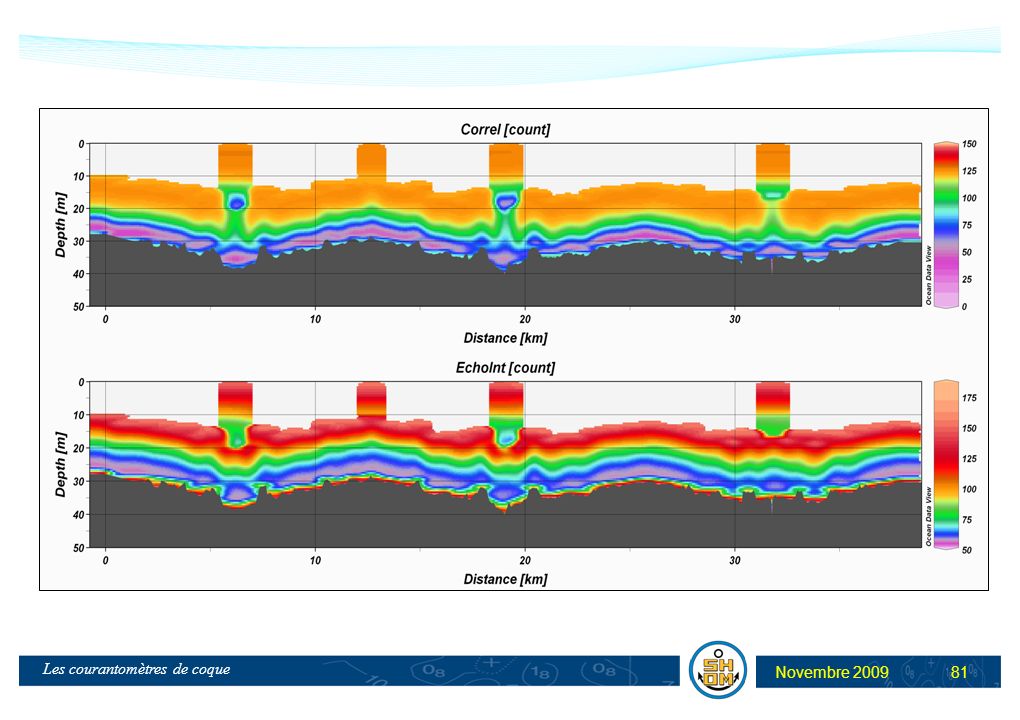
1m50

82
…

83
Script MATLAB: MatFile to ODV
% script de conversion MATFile to ODV fprintf('--> Début\n') clear all; fclose all; load ADCP_38khz_Malaga_Brest__007.mat; FileOUT = 'resultat.odv'; % Nom de la campagne cruise = 'test'; % Lecture des variables contenu dans le fichier entrée if SerYear > 80 SerYear = SerYear ; else SerYear = SerYear ; end; % vecteurs heure et date date = [SerMon SerDay SerYear]; heure = [SerHour SerMin SerSec]; % nombre de profils m = length(SerEnsembles); % nombre de cellules n = length(SerBins); % immersion des cellules %AnDepthmm = 750; % pour correction en mm for i=1:n, Depth(i) = RDIBinSize*(i-1) + AnDepthmm(1)/ RDIBin1Mid; % calcul du Bot Depth BotDepth = (AnBTDepthcmB1 + AnBTDepthcmB2 + AnBTDepthcmB3 + AnBTDepthcmB4)/4/100 + AnDepthmm(1)/1000; % conversion des dates en décimales depuis le 1er janv de l'année (jour calendaire) datedeci_matlab = datenum(SerYear, SerMon, SerDay, SerHour, SerMin, SerSec); datedeci_origine = datenum(SerYear(1), 01, 01, 00, 00, 00); jourCal = datedeci_matlab - datedeci_origine + 1; fprintf(' -> écriture dans le fichier ''%s'' \n', FileOUT); fid = fopen(FileOUT, 'w+'); fprintf(fid,'Cruise Station Type mon/day/yr hh:mm Longitude [degrees_east] Latitude [degrees_north] Bot. Depth [m] Depth [m] Dir [deg] U [cm/s] V [cm/s] Mag [cm/s] EchoInt [count] Coorel [count] JourCal [jr]\n'); for j=1:m for i=1:n if Depth(i) < BotDepth(j) % suppression des données sous le fond !! fprintf(fid,'%s\t%g\t%s\t%d/%d/%d\t%d:%d:%d\t%f\t%f\t%g\t%g\t%g\t%g\t%g\t%g\t%g\t%g\t%.5f\n', cruise, j+356, 'C', date(j,1), date(j,2), date(j,3), heure(j,1), heure(j,2), heure(j,3), AnFLonDeg(j), AnFLatDeg(j), BotDepth(j), Depth(i), SerDir10thDeg(j,i)/10, SerEmmpersec(j,i)/10, SerNmmpersec(j,i)/10, SerMagmmpersec(j,i)/10, SerEAAcnt(j,i), SerCAcnt(j,i), jourCal(j)); fclose(fid); %clear all; %close all; fprintf(' -> fin\n\n\n');
 clear all; fclose all; load ADCP_38khz_Malaga_Brest__007.mat; FileOUT = resultat.odv ; % Nom de la campagne. cruise = test ; % Lecture des variables contenu dans le fichier entrée. if SerYear > 80. SerYear = SerYear ; else. SerYear = SerYear ; end; % vecteurs heure et date. date = [SerMon SerDay SerYear]; heure = [SerHour SerMin SerSec]; % nombre de profils. m = length(SerEnsembles); % nombre de cellules. n = length(SerBins); % immersion des cellules. %AnDepthmm = 750; % pour correction en mm. for i=1:n, Depth(i) = RDIBinSize*(i-1) + AnDepthmm(1)/ RDIBin1Mid; % calcul du Bot Depth. BotDepth = (AnBTDepthcmB1 + AnBTDepthcmB2 + AnBTDepthcmB3 + AnBTDepthcmB4)/4/100 + AnDepthmm(1)/1000; % conversion des dates en décimales depuis le 1er janv de l année (jour calendaire) datedeci_matlab = datenum(SerYear, SerMon, SerDay, SerHour, SerMin, SerSec); datedeci_origine = datenum(SerYear(1), 01, 01, 00, 00, 00); jourCal = datedeci_matlab - datedeci_origine + 1; fprintf( -> écriture dans le fichier %s \n , FileOUT); fid = fopen(FileOUT, w+ ); fprintf(fid, Cruise Station Type mon/day/yr hh:mm Longitude [degrees_east] Latitude [degrees_north] Bot. Depth [m] Depth [m] Dir [deg] U [cm/s] V [cm/s] Mag [cm/s] EchoInt [count] Coorel [count] JourCal [jr]\n ); for j=1:m. for i=1:n. if Depth(i) < BotDepth(j) % suppression des données sous le fond !! fprintf(fid, %s\t%g\t%s\t%d/%d/%d\t%d:%d:%d\t%f\t%f\t%g\t%g\t%g\t%g\t%g\t%g\t%g\t%g\t%.5f\n , cruise, j+356, C , date(j,1), date(j,2), date(j,3), heure(j,1), heure(j,2), heure(j,3), AnFLonDeg(j), AnFLatDeg(j), BotDepth(j), Depth(i), SerDir10thDeg(j,i)/10, SerEmmpersec(j,i)/10, SerNmmpersec(j,i)/10, SerMagmmpersec(j,i)/10, SerEAAcnt(j,i), SerCAcnt(j,i), jourCal(j)); fclose(fid); %clear all; %close all; fprintf( -> fin\n\n\n );")
Présentations similaires







 : I. Propriétés physiques des roches : densités, aimantations induites et.>")


 1. Définition 2. Paramètres influents 3. Modélisation 4. Ordres de grandeur 5. Introduction à la furtivité>")
>")







