Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

2
Modélisation Réalisation Analyse

3
Carte : une plaine avec/sans obstacles + troupeau

4
Proies : - Périmètre de détection d’un prédateur ou d’une proie apeurée. Elles deviennent alors proies apeurées à leur tour. - Déplacements dans 4 directions

5
- Prédateurs - Pas de périmètre de détection - est attirée par la proie la plus proche - se déplace dans 8 directions en étoile

6
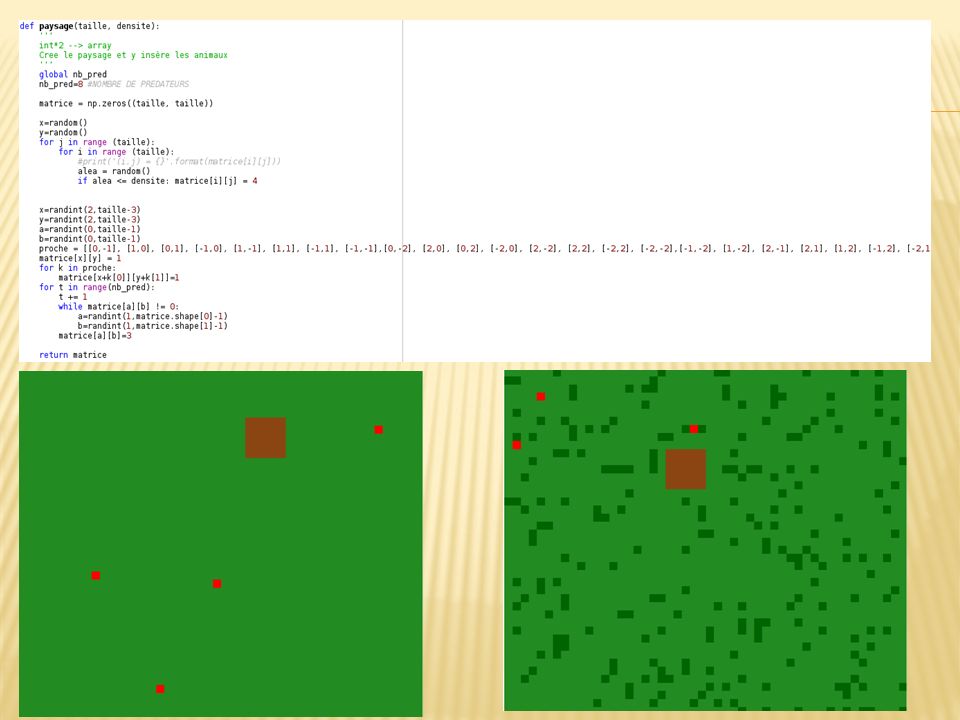
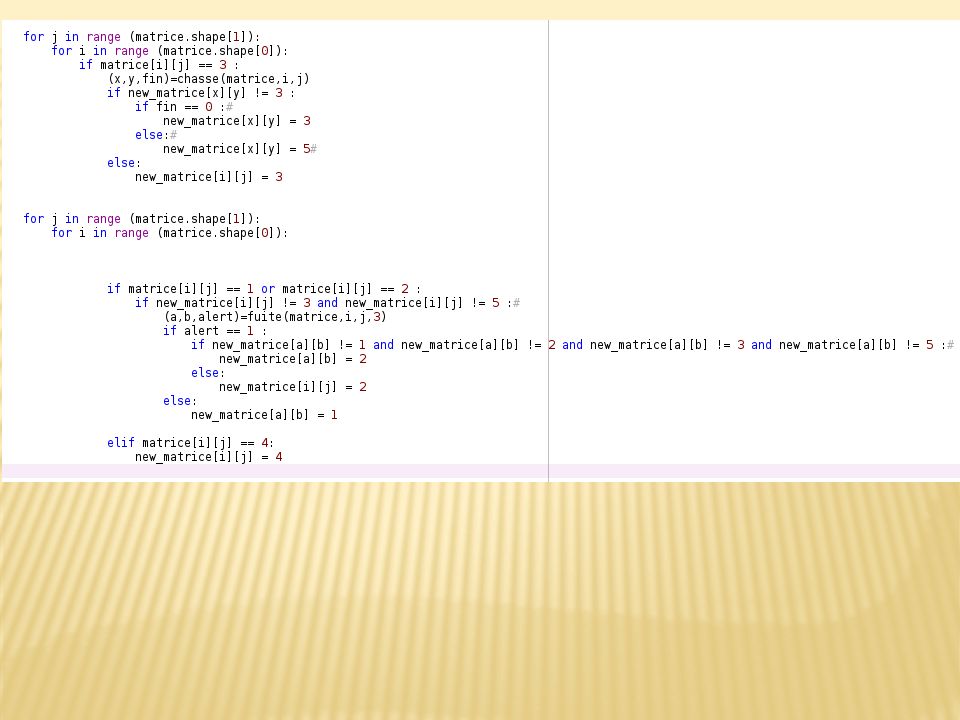
Les trois fonctions principales : -Paysage -Chasse -Fuite

9
Modele Basique : Un/Plusieurs chasseurs ne s’arrête qu’après avoir mangé toutes les proies

10
Modèle A « effet digestion » Le/les prédateurs s’arrêtent après avoir mangé une proie. Vidéo : observons voyons la vitesse pour que toutes les proies soient mangés, en fonction de la densité et du nombre de prédateurs.

11
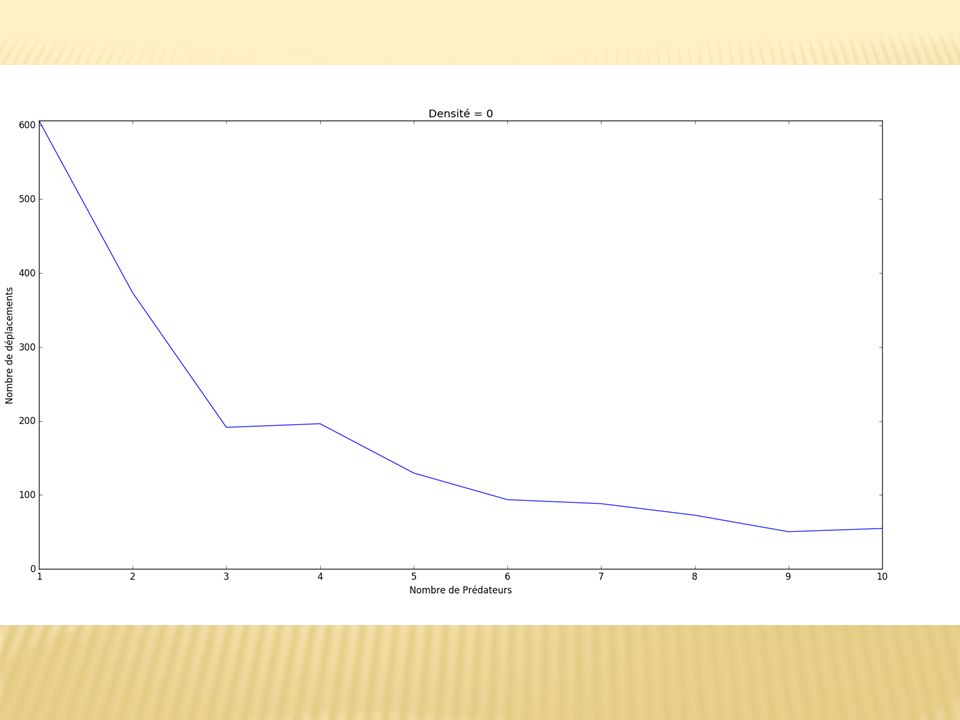
Modèle B Le/Les prédateurs s’arrêtent après un certain nombre de déplacements défini au préalable Vidéo avec variation de nb_dep :

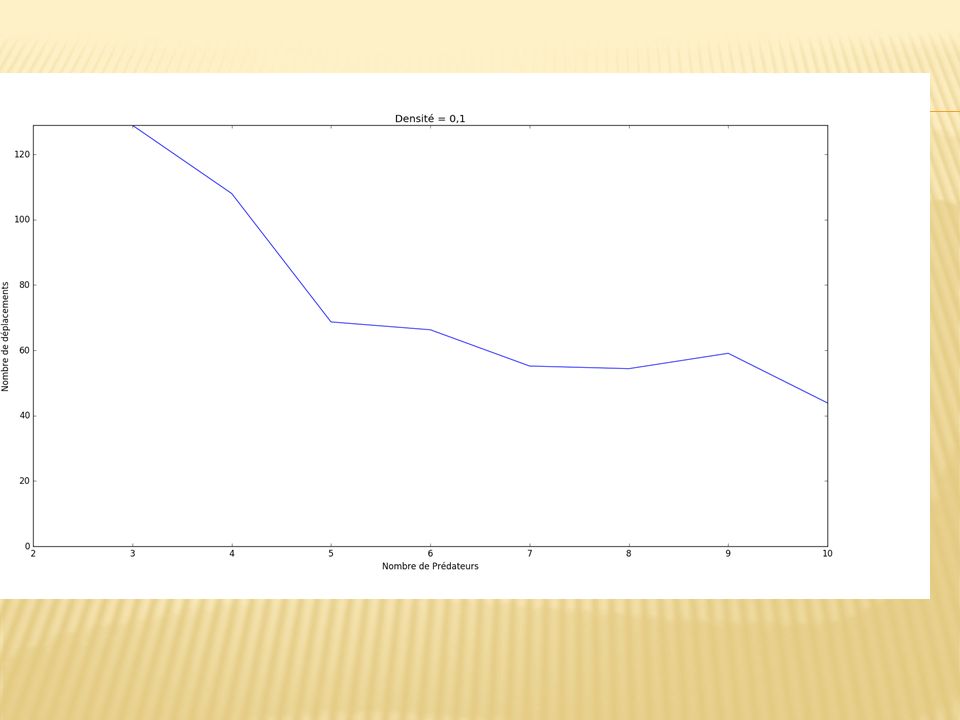
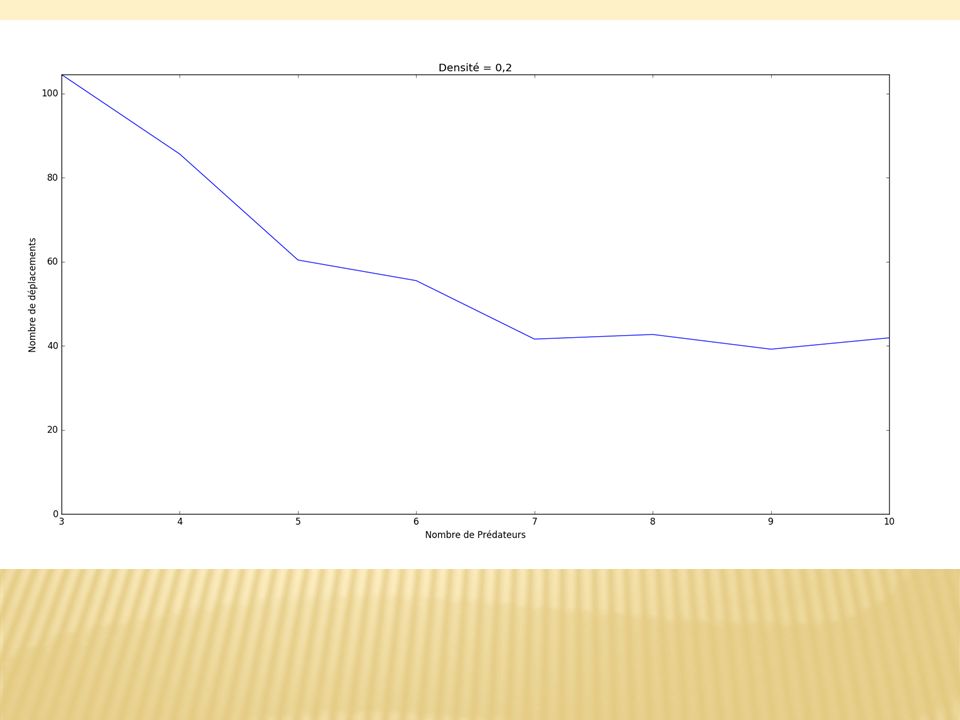
12
Nombre de déplacements en fonction du nombre de prédateurs pour plusieurs densités d’obstacles.

16
Bug prédateur : Le prédateur reste bloqué quand la densité devient trop élevée Le prédateur détecte les proie sur tout le paysage (pas de périmètre) Les obstacles ne gênent pas la vision des proies et du prédateur.
 Les obstacles ne gênent pas la vision des proies et du prédateur.")
17
Travail en autonomie Idée/réalisation Rigueur

Présentations similaires

 Trajectoire d’un mobile>")






 Présentation>")










