Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE MINISTRE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE SCIENTIFIQUE UNIVERSITE LARBI BEN M’HIDI OUM EL BOUAGHI FACULTE DES SCIENCES ET TECHNOLOGIES DEPARTEMENT D'ELECTRONIQUE MEMOIRE DE FIN D'ETUDES EN VUE DE L'OBTENTION DU DIPLÔME D'INGENIEUR D'ETAT EN ELECTRONIQUE Proposé et dirigé par : Présenté par : -Dr. BELHANI AHMED - MADANI ALI -Mr. DJBABLA ALI - HAMADI CHOUAIB THEME :

2
Plan de la présentation Plan de la présentation Introduction générale. Introduction générale. Que est ce qu’un observateur??? Que est ce qu’un observateur??? Observateurs en mode glissant. Observateurs en mode glissant. Applications : Applications : 1- Pendule simple avec une longueur variable. Résultats des simulations. 2- Double pendule inversé. Résultats des simulations. Résultats des simulations. Conclusion. Conclusion.

3
Introduction générale Introduction générale La commande des systèmes nécessite la connaissance des états de système à travers le placement des capteurs, cependant, lorsque le système présente plusieurs états, le nombre de capteurs devient énorme, outre, dans certains cas on ne trouve pas les capteurs appropriés. La commande des systèmes nécessite la connaissance des états de système à travers le placement des capteurs, cependant, lorsque le système présente plusieurs états, le nombre de capteurs devient énorme, outre, dans certains cas on ne trouve pas les capteurs appropriés. Pour remédier à ce problème, on fait appel à la théorie des observateurs, cette théorie repose sur quelque mesure pour reconstituer les états non mesurables. Pour remédier à ce problème, on fait appel à la théorie des observateurs, cette théorie repose sur quelque mesure pour reconstituer les états non mesurables. Pour les systèmes non linaires, les chercheurs ont développé des observateurs appropriés à ce genre de systèmes, parmi lesquels, on peut citer les observateur en mode glissant. Pour les systèmes non linaires, les chercheurs ont développé des observateurs appropriés à ce genre de systèmes, parmi lesquels, on peut citer les observateur en mode glissant.

4
Qu’est ce qu’un observateur ? Qu’est ce qu’un observateur ? Un observateur est un système dynamique que l’on peut appeler capteur informatique, il joue le rôle de reconstituer ou d’estimer en temps réel l'état d’un système à partir : Un observateur est un système dynamique que l’on peut appeler capteur informatique, il joue le rôle de reconstituer ou d’estimer en temps réel l'état d’un système à partir : –Des mesures disponibles. –Des entrées du système. –Et une connaissance a priori du model. Le schéma de principe d un observateur est montré sur la figure (I.1) Le schéma de principe d un observateur est montré sur la figure (I.1)
 Le schéma de principe d un observateur est montré sur la figure (I.1).")
5
Observateurs en mode glissant Observateurs en mode glissant Deux observateurs seront présentés tels que l’observateur classique et l’observateur twisting. Deux observateurs seront présentés tels que l’observateur classique et l’observateur twisting. Classique : Classique : Soit le système: L’observateur classique est définie comme suit: Où est une matrice de gain, avec:

6
Observateur mode glissant d’ordre 1 (twisting): Observateur mode glissant d’ordre 1 (twisting): cet observateur est défini comme suit:
: Observateur mode glissant d’ordre 1 (twisting): cet observateur est défini comme suit:")
7
Applications Applications I. Le pendule simple avec une longueur variable : Le système est décrit par l'équation: Avec : R(t)= 0.8+0.1sin8t+0.3cos4t Sous une représentation d’état, on aura : Le pendule simple
= sin8t+0.3cos4t Sous une représentation d’état, on aura : Le pendule simple.")
8
Observateur classique : Observateur classique : Il est défini comme suit: Résultats des simulations: Résultats des simulations: la position angulaire et la vitesse angulaire avec observateur classique la position angulaire et la vitesse angulaire sans observateur

9
La commande sans observateurLa commande avec observateur classique Observateur mode glissant d’ordre 1 (Twisting) : Cet observateur est défini par : Avec :
 : Cet observateur est défini par : Avec :")
10
Résultats de simulation : Résultats de simulation :Avec: la position angulaire et la vitesse angulaire sans observateur la position angulaire et la vitesse angulaire avec observateur twisting

11
La commande sans observateur La commande avec observateur twisting

12
II.Double pendule inversé : La figure (I.2), représente un double pendule inversé connecté par un ressort de rappel, deux couples et sont appliqués aux entrées à travers des servo- moteurs afin de garantir les positions perpendiculaires. La figure (I.2), représente un double pendule inversé connecté par un ressort de rappel, deux couples et sont appliqués aux entrées à travers des servo- moteurs afin de garantir les positions perpendiculaires. La dynamique est donnée par : Avec : Avec :
, représente un double pendule inversé connecté par un ressort de rappel, deux couples et sont appliqués aux entrées à travers des servo- moteurs afin de garantir les positions perpendiculaires. La dynamique est donnée par : Avec : Avec :.")
13
Observateur Twisting : Observateur Twisting : L’observateur est défini par : Avec:

14
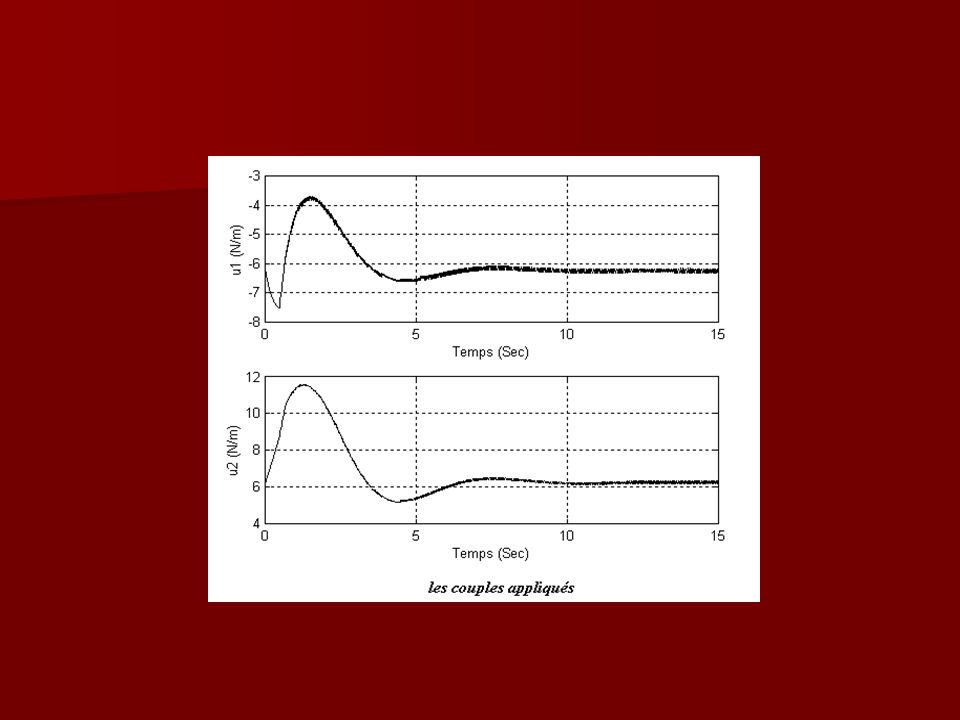
Résultats des simulations: Résultats des simulations:

16
Conclusion Conclusion Ce travail traite les observateurs en mode glissant pour les systèmes non linéaires, deux types d’observateurs ont été développés tels que l’observateur classique et l’observateur twisting. Ce travail traite les observateurs en mode glissant pour les systèmes non linéaires, deux types d’observateurs ont été développés tels que l’observateur classique et l’observateur twisting. Le premier observateur a présenté le phénomène du chattering qui a été réduit à travers l’application du deuxième type, cependant, pour qu’on puisse minimiser le maximum le phénomène du chattering, il est indispensable d’appliquer une observateur dit Super Twisting. Le premier observateur a présenté le phénomène du chattering qui a été réduit à travers l’application du deuxième type, cependant, pour qu’on puisse minimiser le maximum le phénomène du chattering, il est indispensable d’appliquer une observateur dit Super Twisting.

Présentations similaires