Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Master IXXI, cours interdisciplinaire de systèmes dynamiques Emmanuel Risler, INSA de Lyon 3 - Systèmes différentiels dans le plan, suite

2
Exemple 1 : systèmes proie - prédateur
Oscillations plus ou moins régulières, période 9 à 10 ans, grande amplitude

3
Système de Lotka-Volterra
u’ = u ( 1 - v ) v’ = v ( -1 + u ) Iscoclines u’=0 v’=0 Quantité conservée H(u,v) = uv exp(-u-v) v u
 v’ = v ( -1 + u ) Iscoclines u’=0 v’=0. Quantité conservée. H(u,v) = uv exp(-u-v) v. u.")
4
Système de Lotka-Volterra : ajout d’une perturbation

5
Exemple 2 : système de Fitz Hugh-Nagumo
u’ = - u ( u - a ) ( u - 1) - v v’ = e u 0 < a < 1 , e > 0 petit Système à deux échelles de temps v u’ = 0 v’ = 0 1 a u
 ( u - 1) - v. v’ = e u. 0 < a < 1 , e > 0 petit. Système à deux échelles de temps. v. u’ = 0. v’ = a. u.")
6
Exemple 2 : système de Fitz Hugh-Nagumo
u’ = - u ( u - a ) ( u - 1) - v v’ = e (u-1/2) 0 < a < 1 , e > 0 petit v u’ = 0 v’ = 0 1 a u
 ( u - 1) - v. v’ = e (u-1/2) 0 < a < 1 , e > 0 petit. v. u’ = 0. v’ = a. u.")
8
Bifurcations de codimension 1 d’orbites périodiques dans le plan

9
Bifurcation de Hopf super-critique
Au voisinage de la bifurcation : amplitude tend vers 0, fréquence finie

10
Naissance d’une solution périodique par bifurcation nœud-col
(bifurcation « homocline à un nœud-col ») Définitions Une solution homocline est une solution qui converge vers un même équilibre quand t-> + l’infini et – l’infini. Une solution hétérocline est une solution qui converge vers deux équilibres différents lorsque t-> + l’infini et – l’infini. Au voisinage de la bifurcation : amplitude finie, fréquence tend vers 0
 Définitions. Une solution homocline est une solution qui converge vers un même équilibre quand t-> + l’infini et – l’infini. Une solution hétérocline est une solution qui converge vers deux équilibres différents lorsque t-> + l’infini et – l’infini. Au voisinage de la bifurcation : amplitude finie, fréquence tend vers 0.")
11
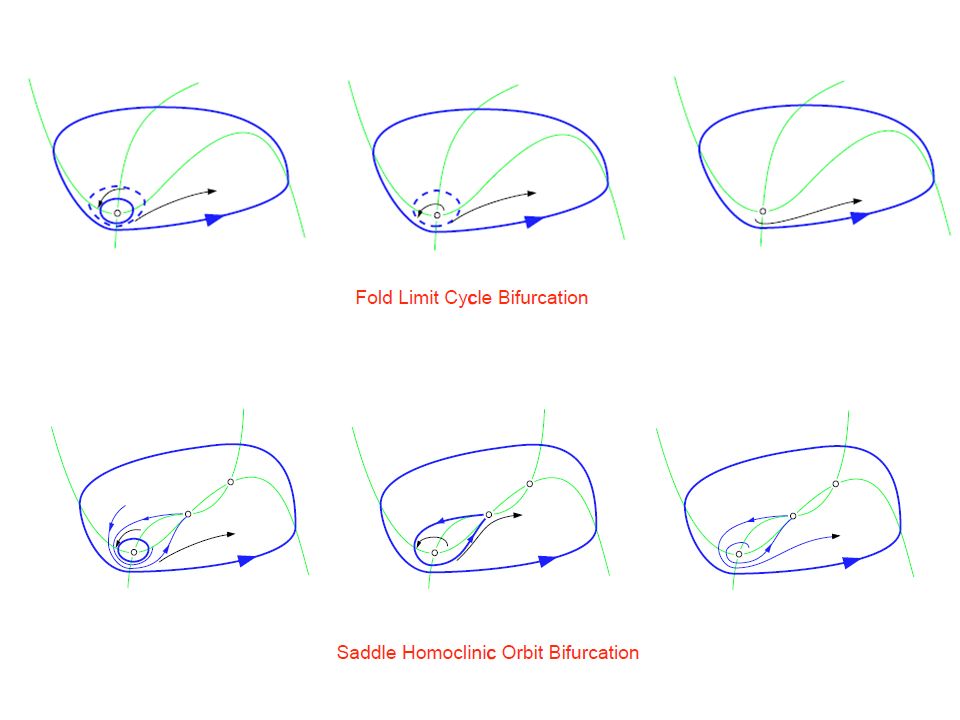
Définition : multiplicateur de Floquet d’une orbite périodique du plan
Définition : une orbite périodique est dite non dégénérée (= transverse) si son multiplicateur de Floquet n’est pas égal à 1 Proposition : une orbite périodique non dégénérée est robuste (= stable par perturbation) Bifurcation « pli » ( = « fold ») d’une orbite périodique dégénérée = confusion de deux orbites périodiques de stabilités opposées (codimension 1) Au voisinage de la bifurcation : amplitude finie, fréquence finie
 si son multiplicateur de Floquet n’est pas égal à 1. Proposition : une orbite périodique non dégénérée est robuste (= stable par perturbation) Bifurcation « pli » ( = « fold ») d’une orbite périodique dégénérée. = confusion de deux orbites périodiques de stabilités opposées. (codimension 1) Au voisinage de la bifurcation : amplitude finie, fréquence finie.")
14
Homoclinisation à un point selle (bifurcation « globale »)
Valeurs propres du point selle : l- < 0 < l+ avec l+ < | l- | Orbite homocline « attractive » Orbite périodique attractive Au voisinage de la bifurcation : amplitude finie, fréquence tend vers 0

15
Théorème de Poincaré-Bendixon
Soit x’(t) = f(x(t)) une équation différentielle dans le plan On suppose (hypothèse générique) que les points d’équilibres forment un ensemble discret (les équilibres sont isolés, ou encore dans tout ensemble bornée il n’existe qu’un nombre fini d’équilibres) Soit x(t) une solution, bornée lorsque t tend vers + l’infini Alors on est dans l’un des quatre cas suivants : la solution est constante (équilibre) la solution est asymptotiquement constante (converge vers un équilibre lorsque t tend vers + l’infini) la solution est périodique la solution est asymptotiquement périodique (converge vers une orbite périodique lorsque t tend vers + l’infini) la solution converge vers un « cycle » constitué d’un nombre fini d’orbites homoclines ou hétéroclines (en ce cas, la solution est asymptotiquement oscillante, avec une fréquence qui tend vers 0). Le cas 5 se produit par exemple lors de l’homoclinisation à un point selle. Il est non générique (se produit en codimension 1 ou plus)
 = f(x(t)) une équation différentielle dans le plan. On suppose (hypothèse générique) que les points d’équilibres forment un ensemble discret (les équilibres sont isolés, ou encore dans tout ensemble bornée il n’existe qu’un nombre fini d’équilibres) Soit x(t) une solution, bornée lorsque t tend vers + l’infini. Alors on est dans l’un des quatre cas suivants : la solution est constante (équilibre) la solution est asymptotiquement constante (converge vers un équilibre lorsque t tend vers + l’infini) la solution est périodique. la solution est asymptotiquement périodique (converge vers une orbite périodique lorsque t tend vers + l’infini) la solution converge vers un « cycle » constitué d’un nombre fini d’orbites homoclines ou hétéroclines (en ce cas, la solution est asymptotiquement oscillante, avec une fréquence qui tend vers 0). Le cas 5 se produit par exemple lors de l’homoclinisation à un point selle. Il est non générique (se produit en codimension 1 ou plus)")
16
« Démonstration » du théorème de Poincaré-Bendixon
La trajectoire se contraint elle-même : « pas suffisamment de place pour des comportements complexes » Théorème de Poincaré-Bendixon : dans le plan, les solutions sont toujours soit asymptotiquement constantes, soit asympotiquement oscillantes (avec une fréquence ou bien constante, ou bien qui tend vers 0). La complexité de la dynamique que l’on peut rencontrer dans le plan est donc limitée à : équilibres oscillations
. La complexité de la dynamique que l’on peut rencontrer dans le plan est donc limitée à : équilibres. oscillations.")
17
Théorème d’Andronov : classification des bifurcations de codimension 1 des orbites périodiques du plan 1 2 3 4
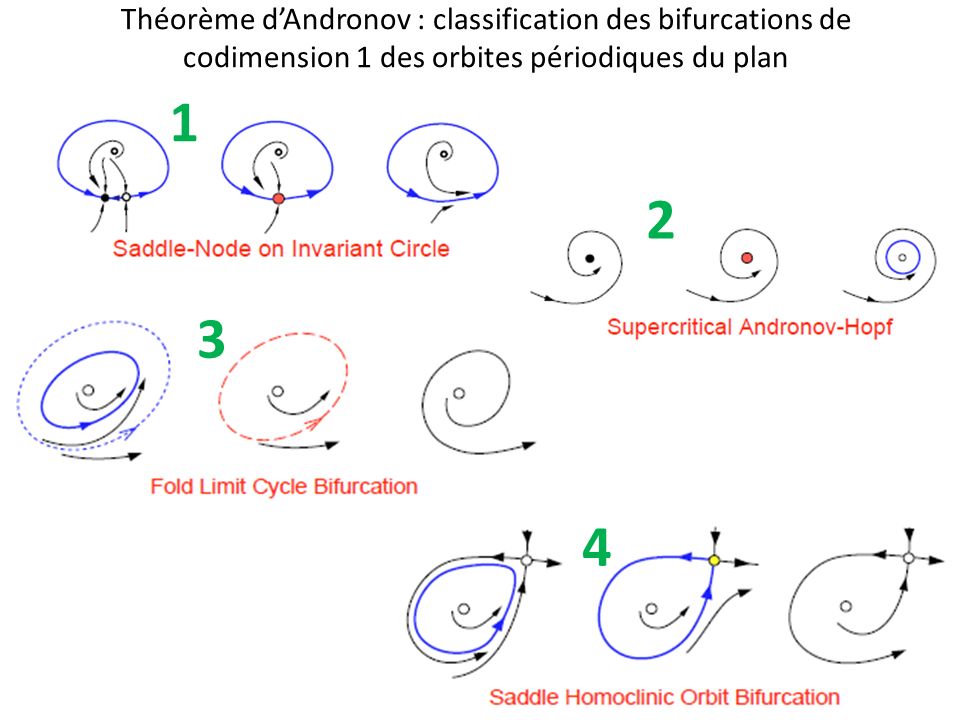
18
Exercice : retrouver ces quatre bifurcations dans des systèmes à deux échelles de temps (en modifiant la forme des isoclines dans le système de Fitz-Hugh Nagumo)
")
19
« Canards » de Fitz Hugh-Nagumo
Comportements générés par une perturbation d’amplitude de plus en plus forte Croissance de la solution périodique issue de la bifurcation de Hopf super-critique

20
« Canards » (suite)
")
21
Phénomènes analogues en dimension supérieure

22
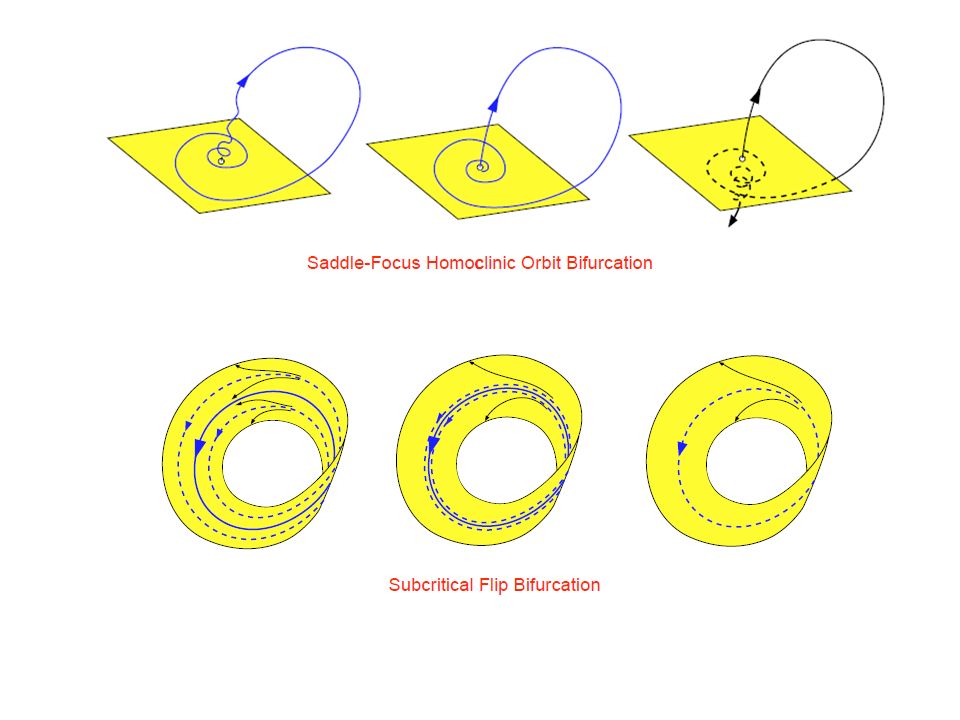
Bifurcation d’homoclinisation à un point col en dimension 3

23
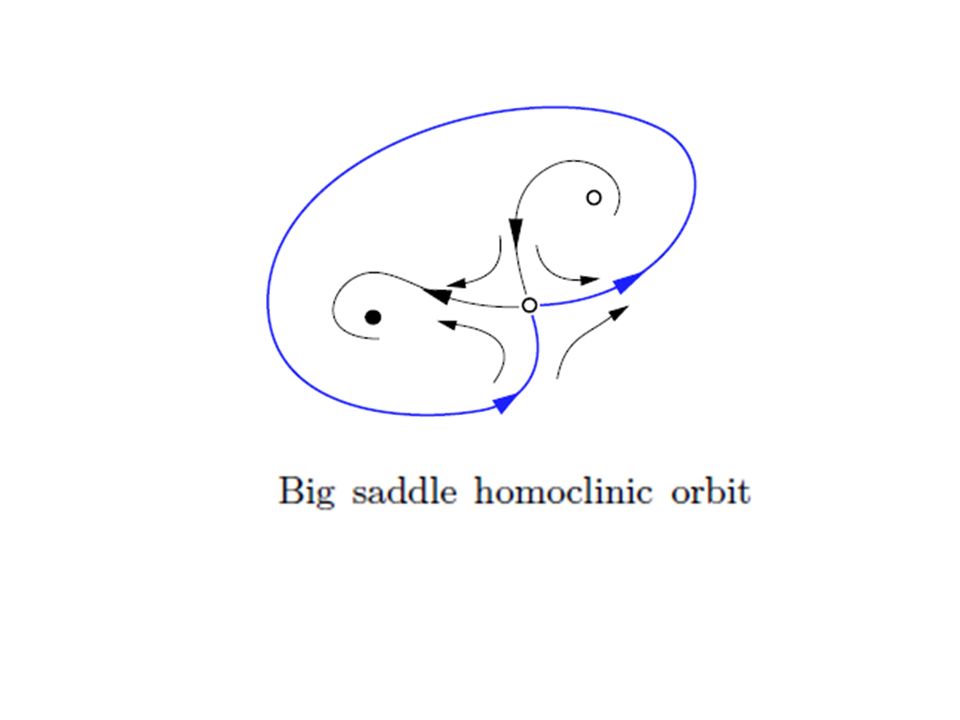
Bifurcation d’homoclinisation à un point selle en dimension 3

24
Bifurcations des multiplicateurs de Floquet d’une orbite périodique
(dimension 3 et plus)
")
25
Bifurcation de confusion de deux orbites périodiques

26
Bifurcation de doublement de période

27
Perte de stabilité d’une solution périodique (multiplicateur non résonnant)
")
28
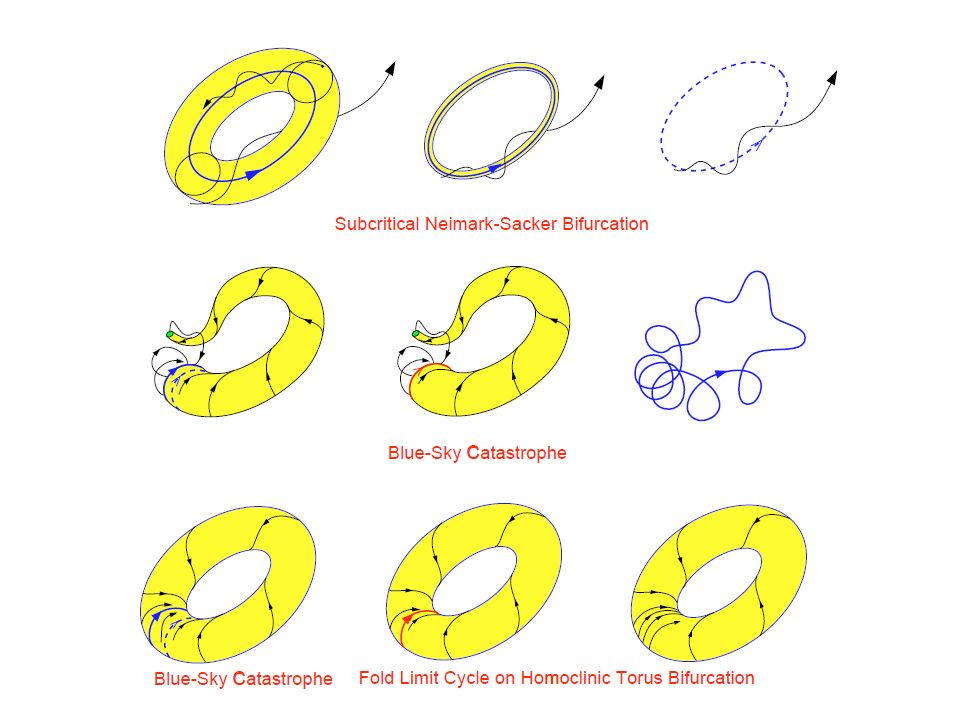
Problème : quand on fait varier un paramètre, peut-on avoir une orbite périodique :
dont la période tend vers l’infini dont la longueur tend vers l’infini donc la trajectoire reste bornée « Blue sky catastrophes » Deux types d’homoclines à une orbite périodique de type « nœud-col » (et deux types de « Blue sky catastrophes »)
")
29
Bifurcation « Blue-sky »

30
Systèmes excitables

31
Neurone (système excitable) « formel »
 « formel »")
32
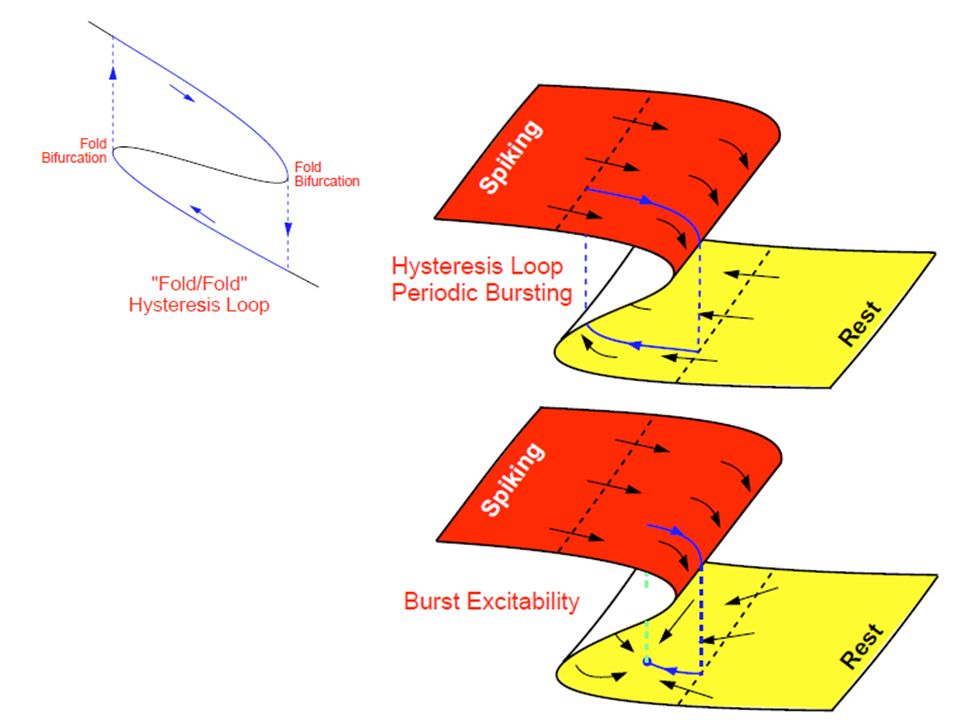
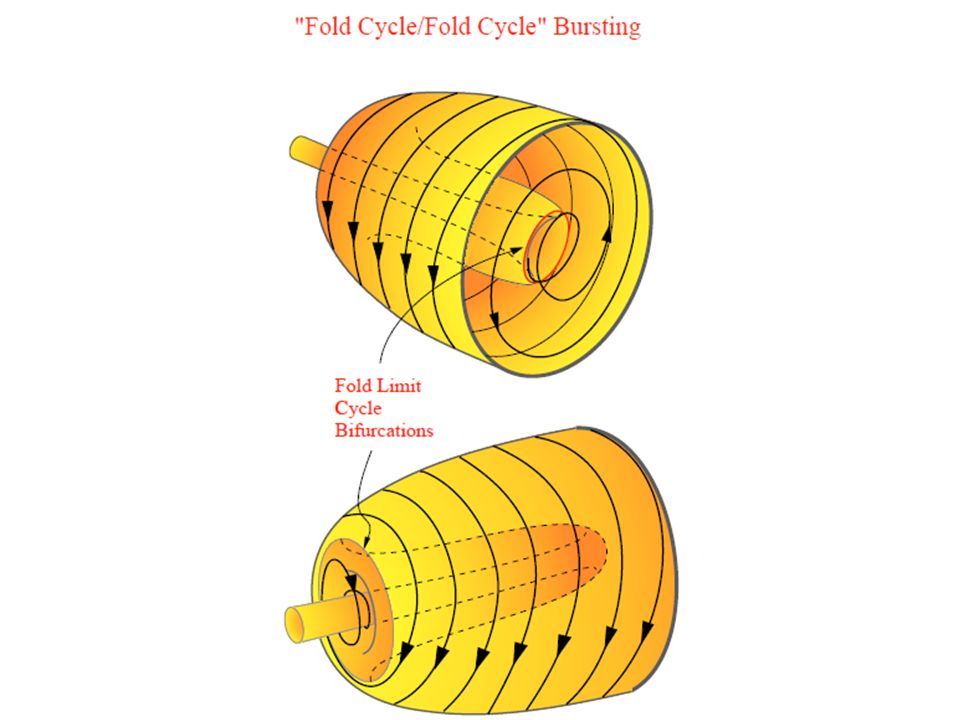
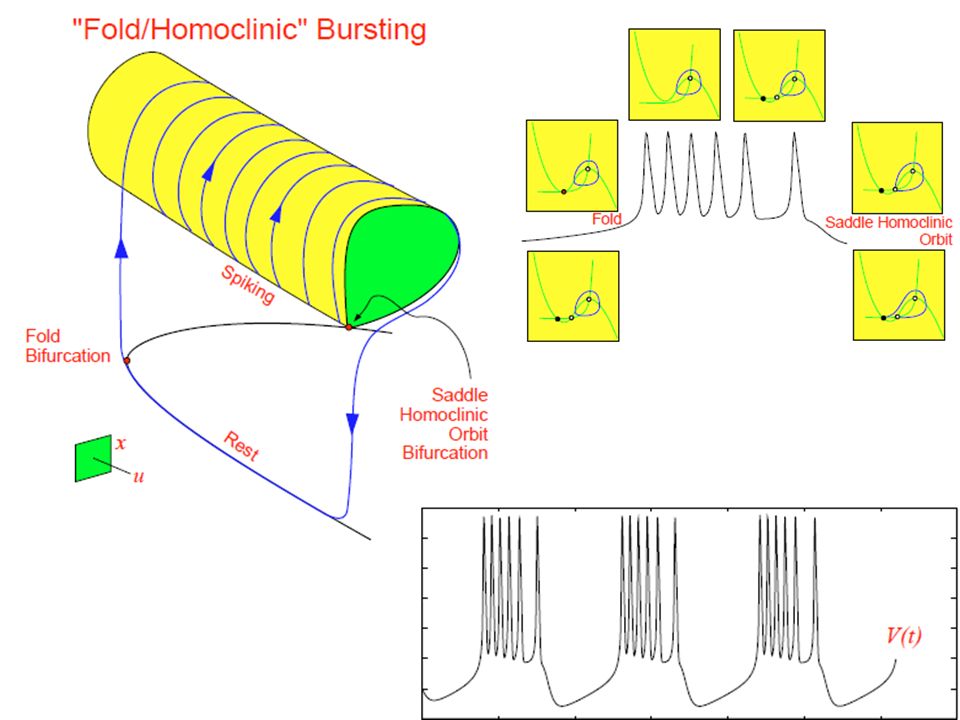
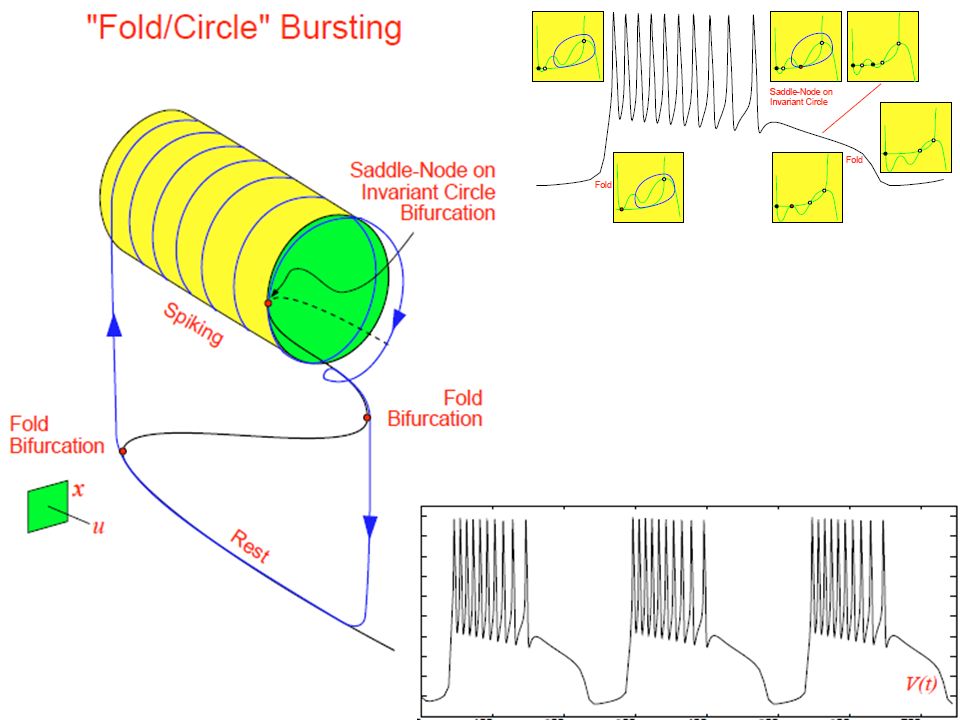
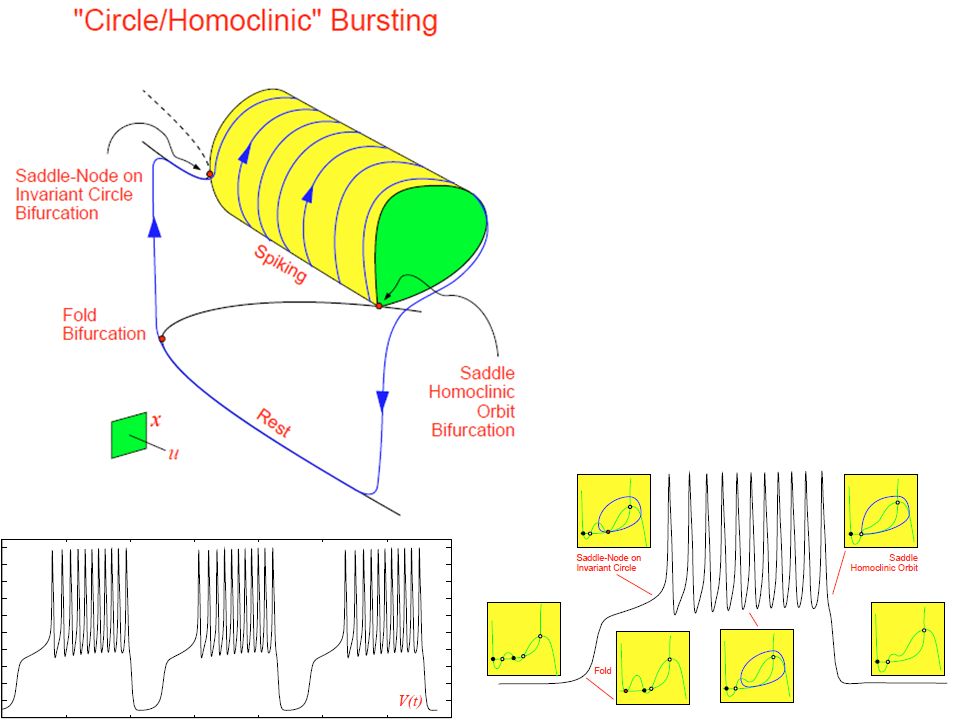
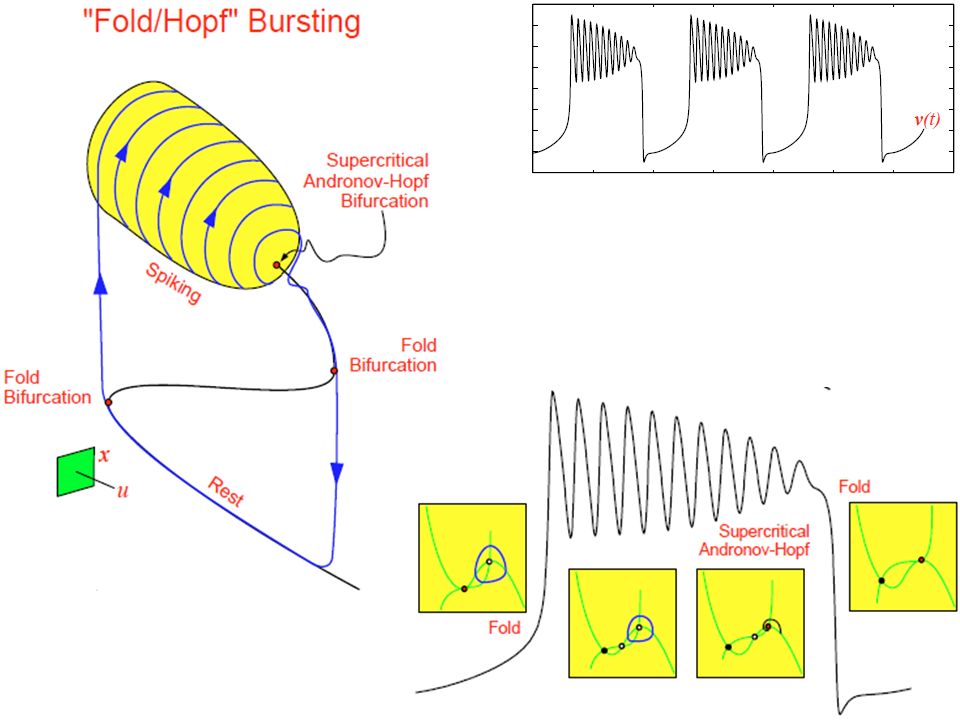
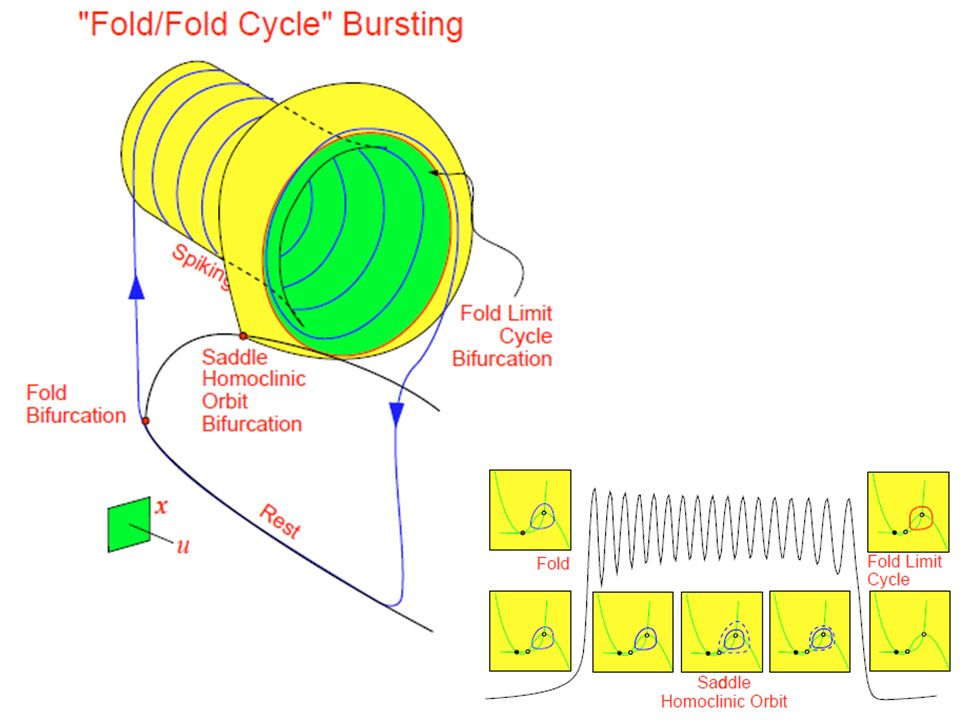
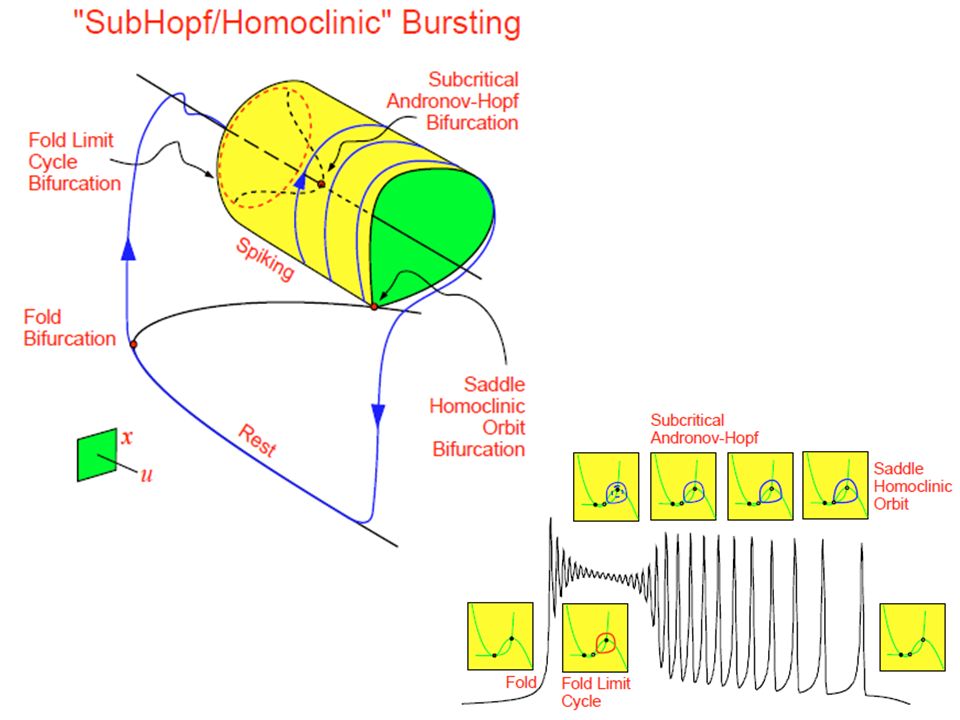
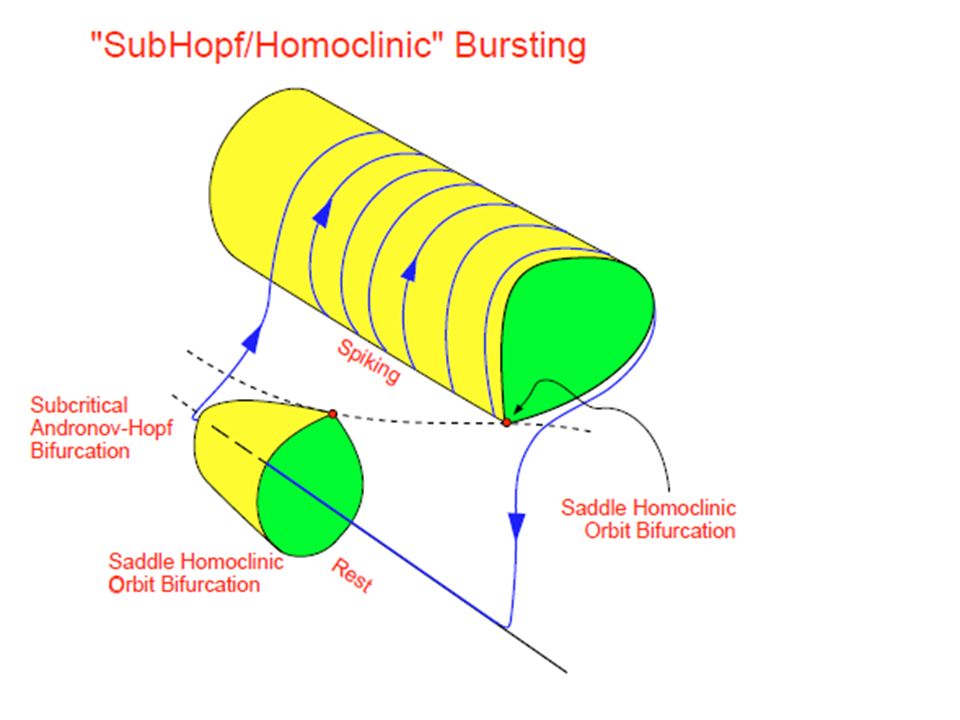
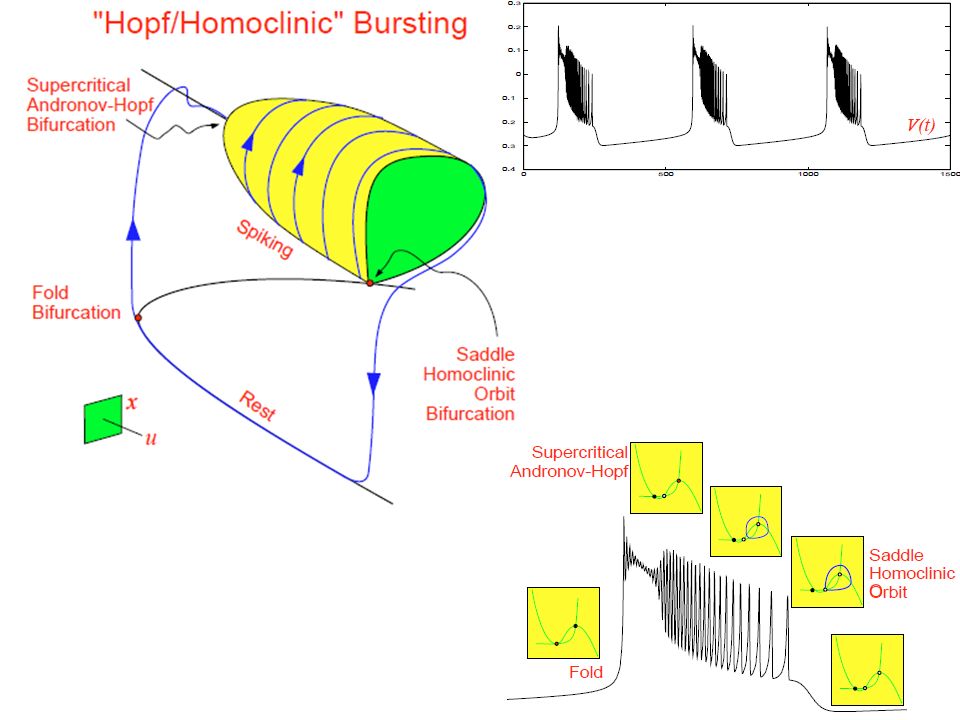
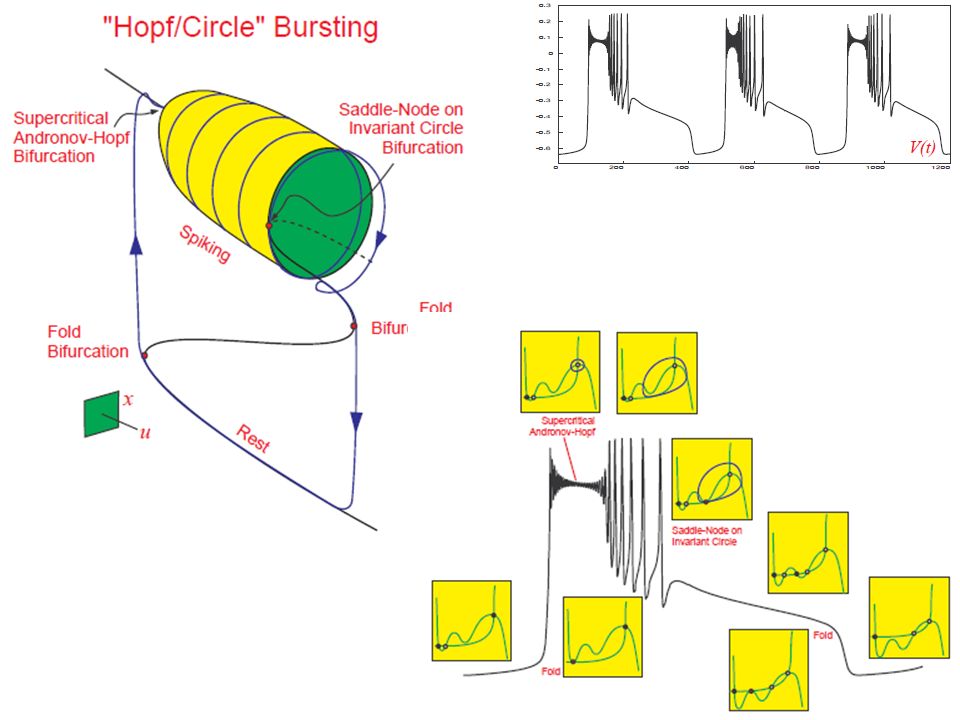
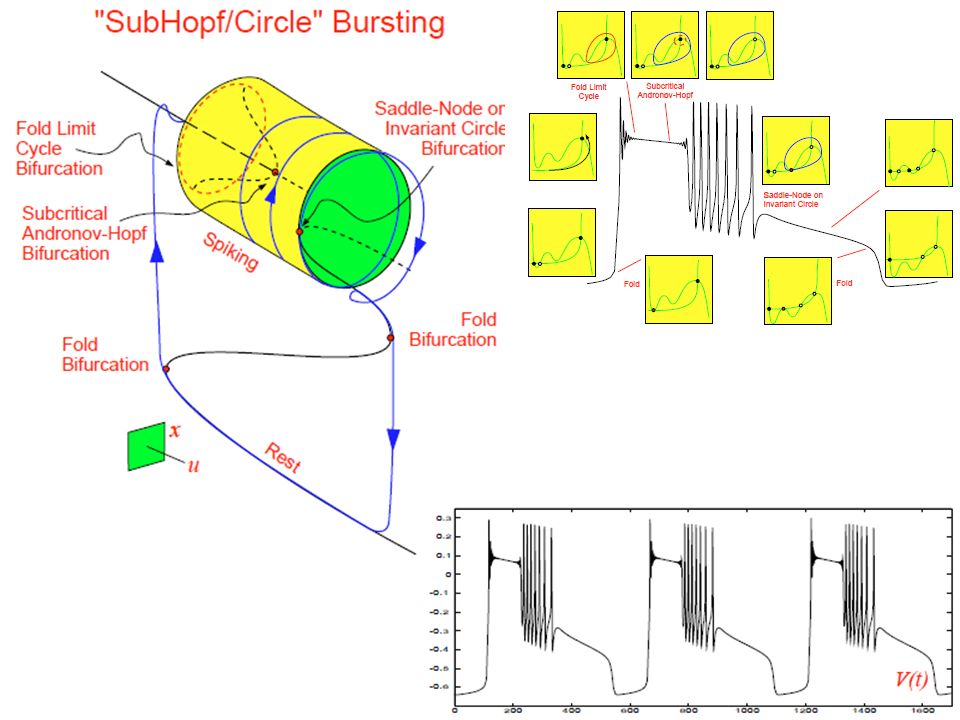
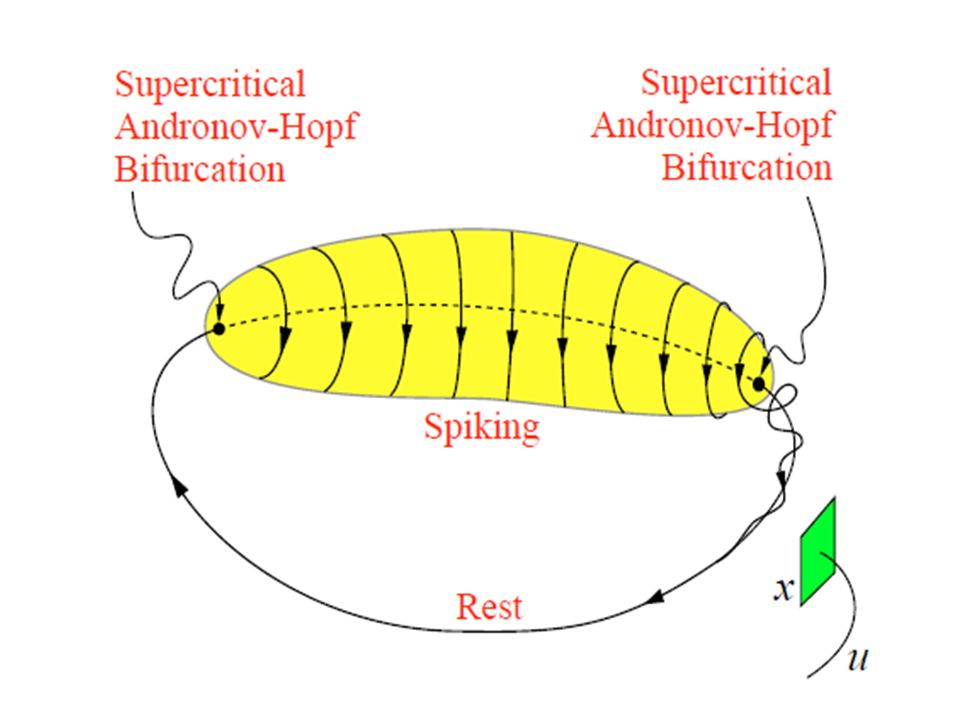
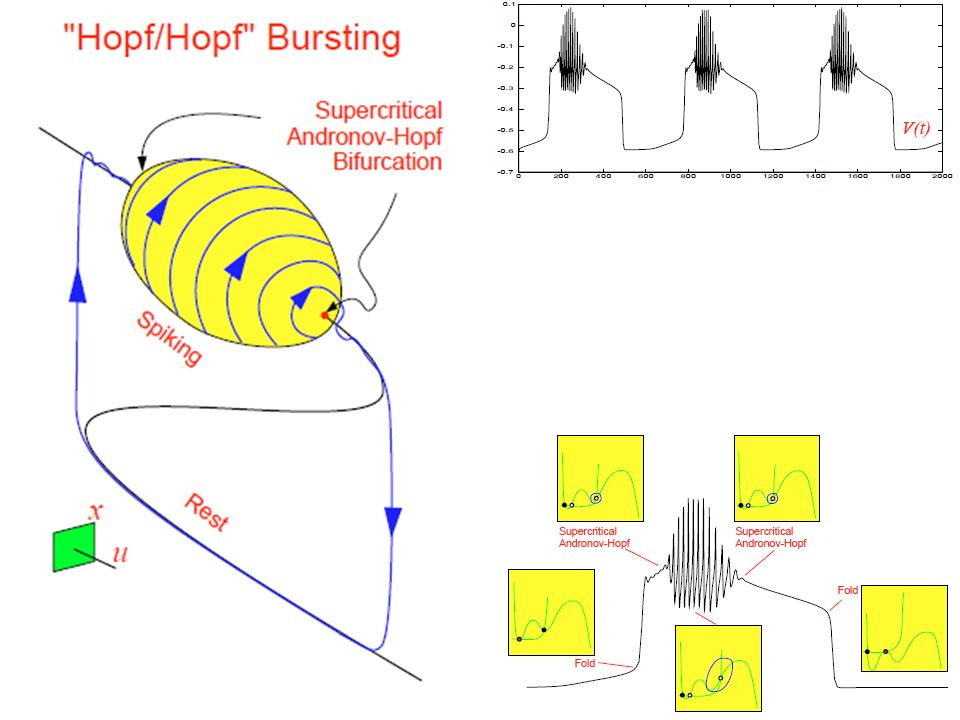
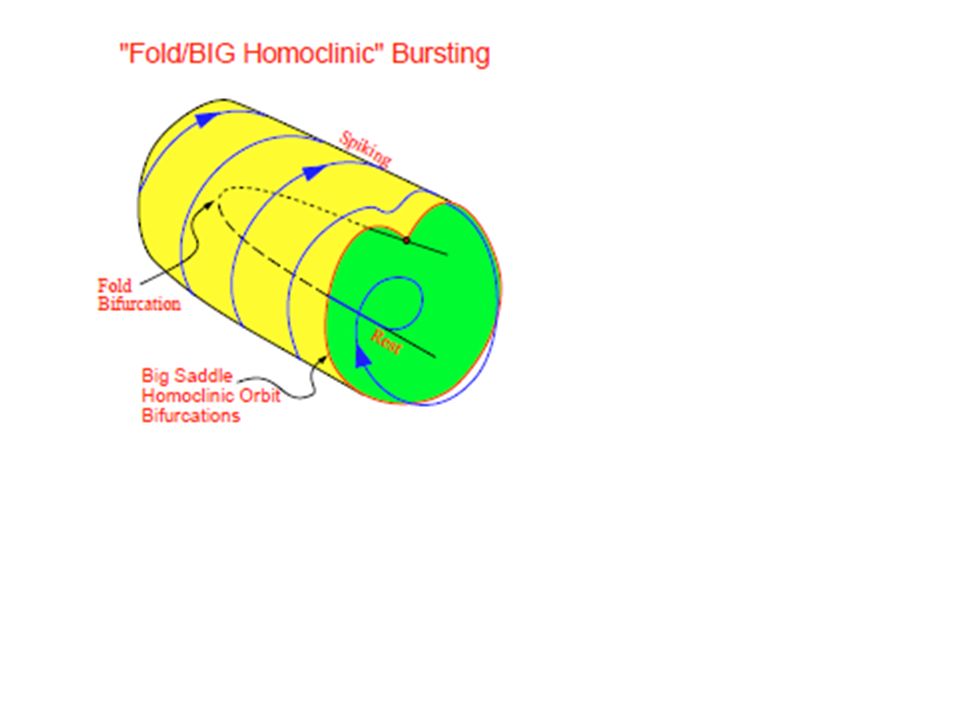
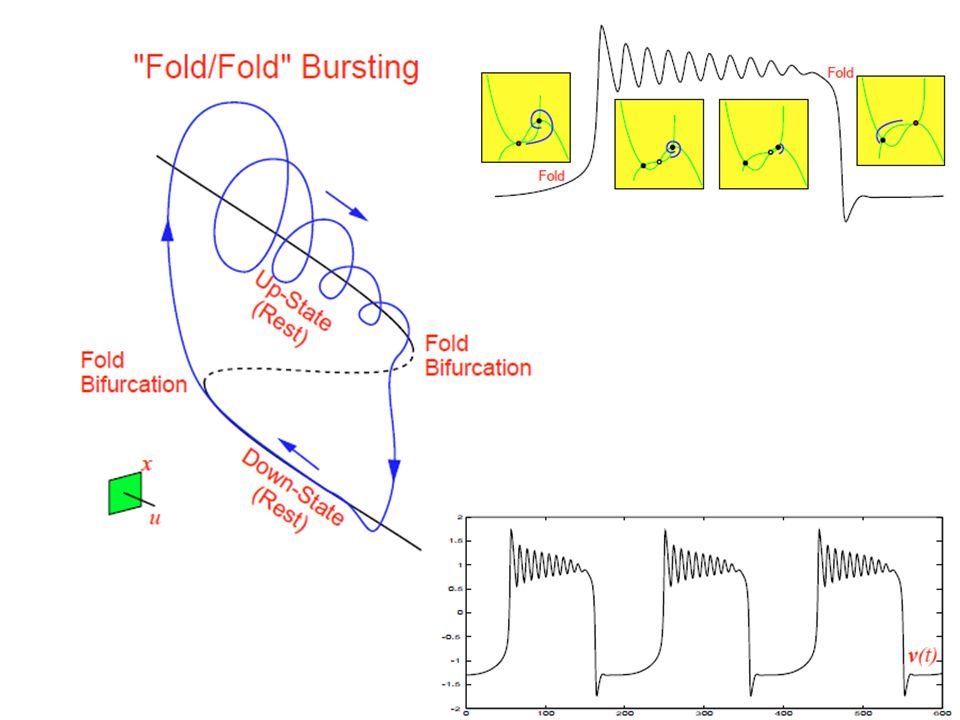
« Bursting »

33
Excitabilités de types I et II

34
Exemples dans des systèmes à deux échelles de temps

35
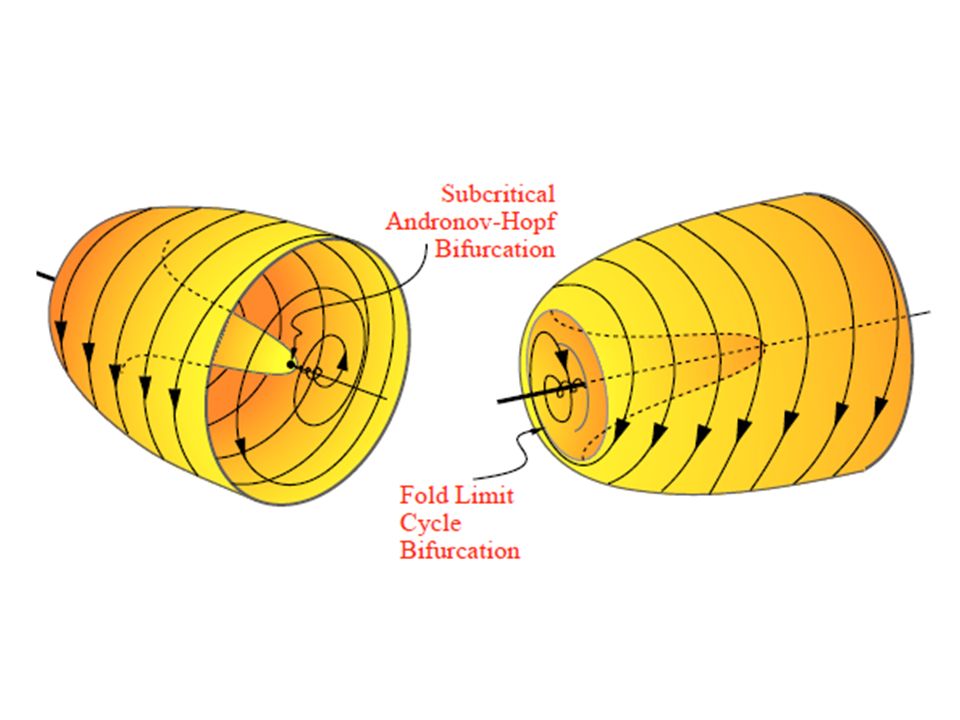
Systèmes excitables (suite)
")
36
Exercice : interpréter ces schémas

37
Déploiement d’une bifurcation de codimension deux

38
Déploiement d’une bifurcation de codimension deux

39
Déploiement d’une bifurcation de codimension deux (bis)
")
40
Exemple d’un système mécanique présentant cette bifurcation de codimension deux : le pendule amorti forcé

41
Libre interprétation de dessins

Présentations similaires

 Évolution temporelle des systèmes quantiques.>")
 Comportement corpusculaire des ondes>")





 Equation de la corde vibrante 1) Le modèle.>")











