Télécharger la présentation
1
Les machines asynchrones

2
Mat de 1893, 7,5 kW 1700 tr/min, 50 V

3
Mat 0,75 kW 1905-19121912-1922 1922-1933 1933-1946 1946-1961 1961-1970 1970-…

4
Les machines asynchrones

5
Les machines asynchrones sont surtout utilisées comme moteurs. 80% des moteurs électriques sont des moteurs asynchrones Les moteurs asynchrones sont très robustes Leur gamme de puissance s’étale de quelques watts à une dizaine de mégawatts.

6
Constitution de la machine asynchrone

7
La machine asynchrone est constituée d ’un stator semblable à celui d ’une machine synchrone. Ce stator, alimenté par des courants triphasés, produit un champ magnétique tournant (cf th de Ferraris).
..")
8
Le stator

9
Plaque à bornes Plaque signalétique

11
Carcasse usinée

12
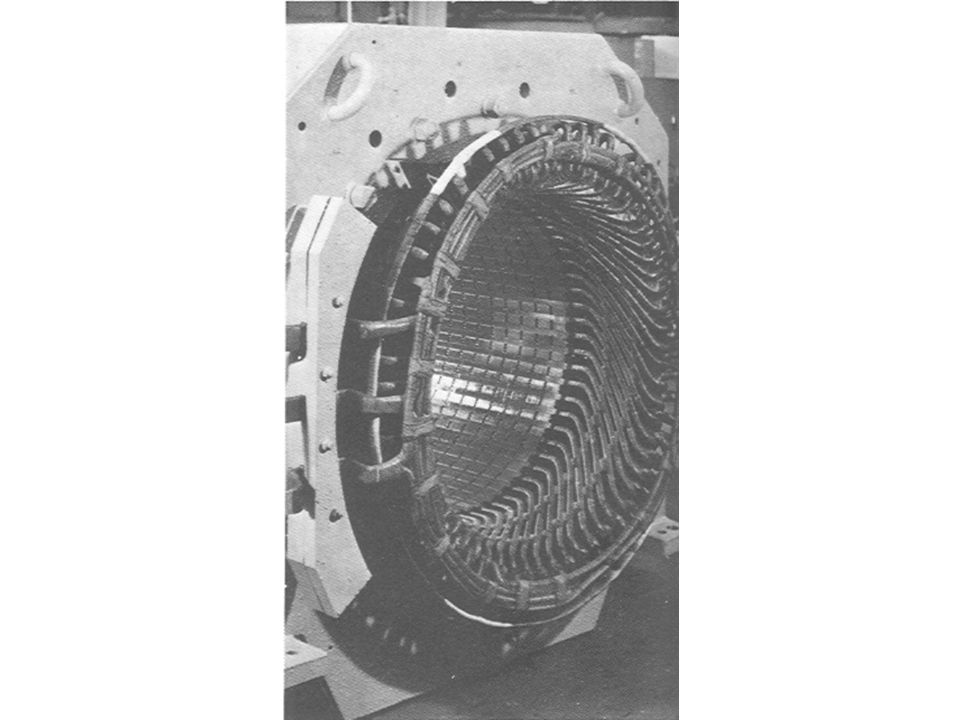
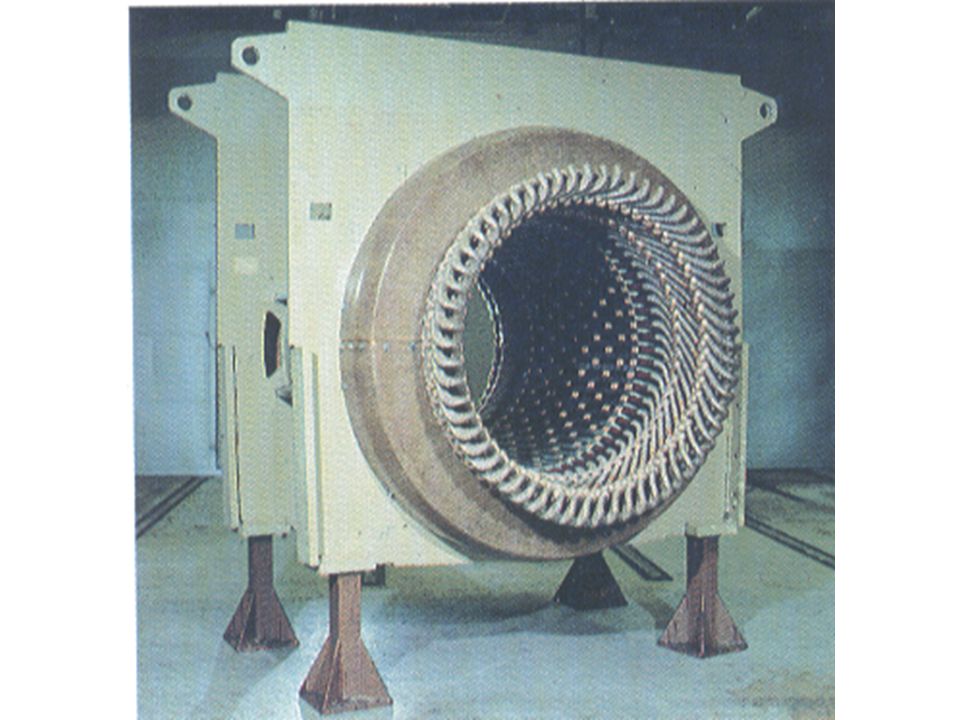
Stator avant bobinage

13
Stator après bobinage

16
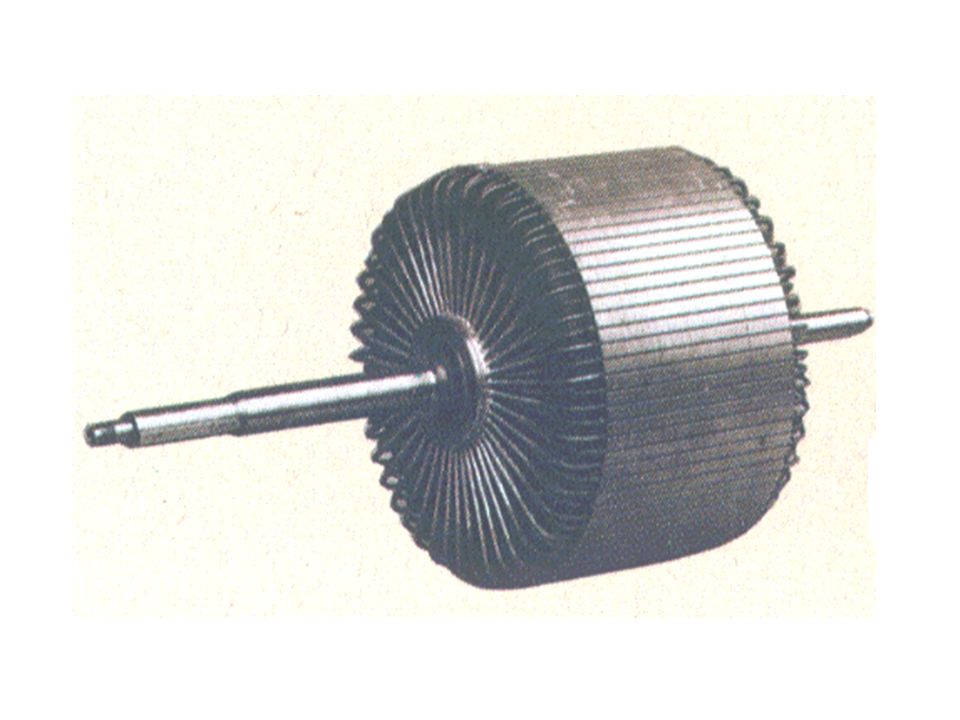
Le rotor

17
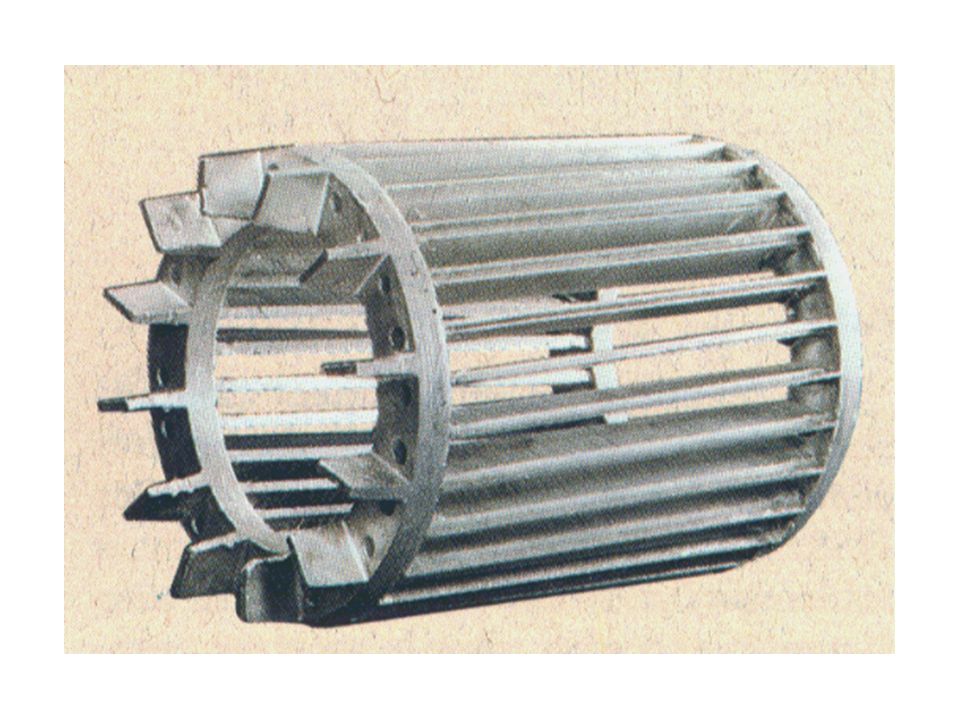
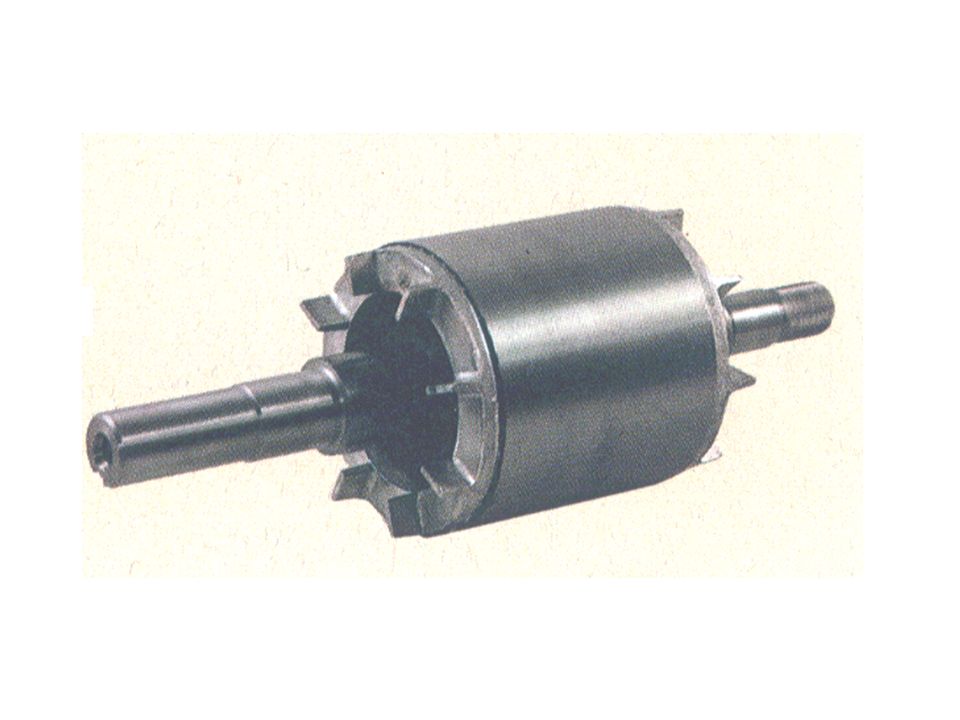
Le rotor est constitué d ’un ensemble de conducteurs en court-circuit appelé « cage d ’écureuil » Rotor en cage d ’écureuil

18
Cage d ’écureuil en aluminium moulé

20
Rotor en cage d ’écureuil

24
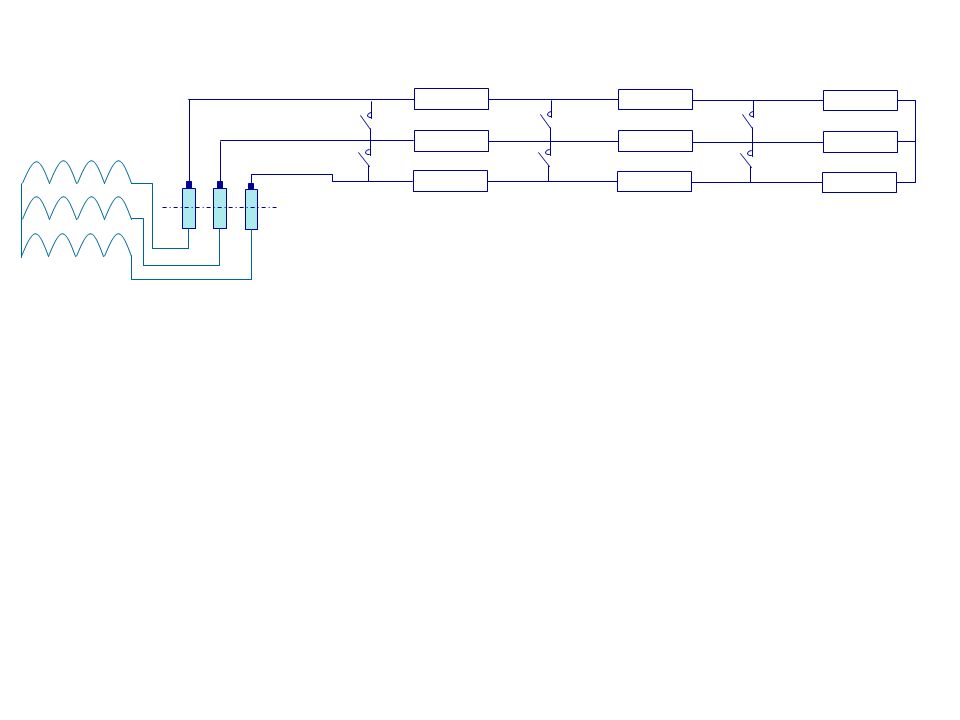
Rotor bobiné rhéostat

25
les 3 bagues d ’un rotor bobiné

27
La plaque signalétique

28
Plaque signalétique cos puissancevitesse nominaleFréquence des courants statoriques rendementnombre de phases

29
Plaque signalétique tension maximum aux bornes d ’un enroulement tension maximum entre l ’extrémité d ’un enroulement et le neutre

30
Plaque signalétique intensité normale absorbée sur les lignes pour un couplage triangle intensité normale absorbée sur les lignes pour un couplage étoile Température maximale d ’utilisation

31
Plaque signalétique classe de l ’isolementService continu

32
Plaque signalétique indice de protection IP

33
Indice de protection IP premier chiffre = degré de protection des personnes contre l’accès aux parties dangereuses et la protection des matériels contre la pénétration des corps étrangers deuxième chiffre =degré de protection contre les effets nuisibles de la pénétration de l’eau protection maximum = IP 66 IP 54 = protection contre la pénétration des poussières et protection contre les projections d ’eau

34
Plaque signalétique

35
IP 55 = protection contre la pénétration des poussières et protection contre les jets d ’eau

36
Plaque signalétique

37
plaque à bornes Disposition des enroulements du stator à partir de la plaque à bornes lamelle de cuivre

38
1 2 3 Couplage en étoile

39
1 2 3 Couplage en triangle

40
Principe de fonctionnement de la machine asynchrone

41
N N S S Stator tétrapolaire par exemple

42
N N S S

43
N N S S rotor

44
N N S S

45
N N S S S N S N

46
N N S S S N S N

47
N N S stator S Le pôle nord stator tire le pôle sud rotor Le pôle sud stator repousse le pôle sud rotor rotor Mise en rotation du rotor

48
N N S S Apparition des pôle dans le rotor Le flux diminue

49
N N S S Apparition des pôle dans le rotor flux rotorique induit courant rotorique induit S

50
Sur la périphérie du rotor, il y a nécessairement autant de pôles que sur le stator; cela résulte de leur nature : ce sont des pôles induits Ces pôles tournent à la même vitesse de rotation que ceux du stator L ’attraction/répulsion mutuelle entre pôles statoriques et rotoriques développe le couple moteur; ce couple est le couple électromagnétique

51
Le couple électromagnétique résulte des courants induits, et donc des variations de flux. Si le rotor tourne à la même vitesse que le stator, il n ’y a plus de variation de flux. Donc le rotor ne peut tourner qu’à une vitesse inférieure à celle du champ statorique. La vitesse de synchronisme ne peut en aucun cas être atteinte (en fonctionnement moteur). D’où le nom de machine asynchrone.
. D’où le nom de machine asynchrone..")
52
Le rotor tourne à une vitesse Nr<Ns inférieure à celle du champ statorique. Le rotor glisse donc par rapport à ses propres pôles. Ce glissement provoque une perte d ’énergie qui lui est proportionnelle.

53
Comparaison mécanique N N S S S S N N rotor

54
Comparaison mécanique N N S S S S N N rotor ’ Entraînement par friction, (embrayage)
")
55
Bilan de puissance du moteur asynchrone

56
Puissance absorbée Pa=3.V 1.J 1.cos 1 Pertes Joule stator Pertes magnétiques stator Puissance transmise au rotor Pe= Ce.(2 .Ns) Pertes Joule rotor Pertes magnétiques rotor 0 Puissance mécanique P m = Ce.(2 .Nr) Pertes mécaniques Puissance utile Pu= Cu.(2 .Nr)
 Pertes Joule rotor Pertes magnétiques rotor 0 Puissance mécanique P m = Ce.(2 .Nr) Pertes mécaniques Puissance utile Pu= Cu.(2 .Nr)")
57
Puissance absorbée Pa=3.V 1.J 1.cos 1 Pertes Joule stator Pertes magnétiques stator Puissance transmise au rotor Pe= Ce.(2 .Ns) Pertes Joule rotor Pertes magnétiques rotor 0 Puissance mécanique P m = Ce.(2 .Nr) Pertes mécaniques Puissance utile Pu= Cu.(2 .Nr) stator rotor
 Pertes Joule rotor Pertes magnétiques rotor 0 Puissance mécanique P m = Ce.(2 .Nr) Pertes mécaniques Puissance utile Pu= Cu.(2 .Nr) stator rotor")
58
La transmission de puissance au rotor se fait avec perte de vitesse mais à couple constant Puissance absorbée Pa=3.V 1.J 1.cos 1 Pertes Joule stator Pertes magnétiques stator Puissance transmise au rotor Pe= Ce.(2 .Ns) Pertes Joule rotor Pertes magnétiques rotor 0 Puissance mécanique P m = Ce.(2 .Nr) Pertes mécaniques Puissance utile Pu= Cu.(2 .Nr)
 Pertes Joule rotor Pertes magnétiques rotor 0 Puissance mécanique P m = Ce.(2 .Nr) Pertes mécaniques Puissance utile Pu= Cu.(2 .Nr)")
59
Puissance transmise au rotor Pe= Ce.(2 .Ns) Pertes Joule rotor Pertes magnétiques rotor 0 Puissance mécanique P m = Ce.(2 .Nr) La différence de puissance est perdue par effet Joule dans le rotor P jr = C e.2 .N s -C e. 2 .Nr = C. 2 .(N s -N r ) Introduisons le glissement : g = Ns - Nr Ns
 Introduisons le glissement : g = Ns - Nr Ns.")
60
p jr = g. 2 .C e.N s = g.P e Rendement : = Pu Pa Pm Pe = N Ns = 1 - g << N Ns = 1 - g Pu Pm Pe Pa < Pm Pe =..

61
Modélisation de la machine asynchrone Etablissement du modèle électrique d ’une phase de la machine asynchrone

62
La machine asynchrone est un transformateur à champ tournant. Soit I 1 le courant d ’une phase statorique, soit I 2 le courant d ’une phase rotorique. Ces courants engendrent des forces magnétomotrices tournantes de vitesse Ns : n’ 1 I 1 et n’ 2 I 2, n’ 1 et n’ 2 étant les nombres de spires de chaque enroulement corrigés par les coefficients de Kapp.

63
R1R1 I 1F I 10 n’ 1 I1I1 l1l1 stator = primaire R2R2 n’ 2 l2l2 rotor = secondaire

64
Quelle est la fréquence des courants rotorique ? La vitesse relative de l ’induction statorique / au rotor est : Ns - Nr = g. Ns Le rotor ayant p paires de pôles, la fréquence des f.é.m. rotoriques est donc : = (2 .f)/p f r = p. (g.Ns) Or Ns = f/p Donc f r = g.f
/p f r = p. (g.Ns) Or Ns = f/p Donc f r = g.f.")
65
0 = j n ’ 2 - j l 2 I 2 - R 2 I 2 g V 1 = j n ’ 1 + j l 1 I 1 + R 1 I 1 Pour une phase du stator : V 2 = 0 = j n ’ 2 (g ) - j (g ) l 2 I 2 - R 2 I 2 Pour une phase du rotor :
 - j (g ) l 2 I 2 - R 2 I 2 Pour une phase du rotor :")
66
R1R1 I 1F I 10 n’ 1 I1I1 l1l1 stator = primaire R2R2 n’ 2 l2l2 rotor = secondaire gg

67
R1R1 I 1F I 10 n’ 1 I1I1 l1l1 stator = primaire R 2 /g n’ 2 l2l2 rotor = secondaire I2I2

68
R 1 (n ’ 2 /n ’ 1 ) 2 I 1F I 10 n’ 1 I1I1 stator = primaire R 2 /g n’ 2 lsls rotor = secondaire I2I2 Pertes fer Pertes Joule stator Pe
 2 I 1F I 10 n’ 1 I1I1 stator = primaire R 2 /g n’ 2 lsls rotor = secondaire I2I2 Pertes fer Pertes Joule stator Pe")
69
Couple et courant à glissement faible

70
On suppose : R 2 /g >> l s et on néglige R 1 (n ’ 2 /n ’ 1 ) 2 I 1F I 10 n’ 1 I1I1 R 2 /g n’ 2 I2I2 Le schéma équivalent devient :
 2 I 1F I 10 n’ 1 I1I1 R 2 /g n’ 2 I2I2 Le schéma équivalent devient :")
71
I 1F I 10 I1I1 R 2 /g I2I2 Soit : I 2 = n 2 ’ n 1 ’ V1V1 g R2R2 2 I 1 = I 1v + n 2 ’ n 1 ’ V1V1 g R2R2

72
I 10 I 1F I 1V V1V1 2 n 2 ’ n 1 ’ V1V1 g R2R2 I1I1 11

73
I 10 I 1F I 1V V1V1 2 n 2 ’ n 1 ’ V1V1 g R2R2 I1I1 11 Si N augmente : g diminue

74
I 10 I 1F I 1V V1V1 2 n 2 ’ n 1 ’ V1V1 g R2R2 I1I1 11 Si N diminue, g augmente

75
P e = 3 R2R2 g I22I22 = C e Soit : = 3 R2R2 g n 2 ’ n 1 ’ V1V1 g R2R2 2 2 2 2 n 2 ’ 2 2 C e = 3 n 1 ’ V1V1 g R2R2 ss = k V 1 2 g R2R2 CeCe N NsNs g=0 g=1

76
3 MAT de 0,18 kW à 45 kW

77
Couple et courant à fort glissement

78
R 2 /g R 1 (n ’ 2 /n ’ 1 ) 2 I 1F I 10 n’ 1 I1I1 n’ 2 lsls I2I2 Considérant que R1R1 n 2 ’ n 1 ’ 2 << j lsj ls I 2 = n 2 ’ n 1 ’ V1V1 g R2R2 1 R1R1 n 2 ’ n 1 ’ 2 + + j lsj ls I 2 = n 2 ’ n 1 ’ V1V1 g R2R2 1 + j lsj ls
 2 I 1F I 10 n’ 1 I1I1 n’ 2 lsls I2I2 Considérant que R1R1 n 2 ’ n 1 ’ 2 << j lsj ls I 2 = n 2 ’ n 1 ’ V1V1 g R2R2 1 R1R1 n 2 ’ n 1 ’ j lsj ls I 2 = n 2 ’ n 1 ’ V1V1 g R2R2 1 + j lsj ls")
79
n 2 ’ 2 2 C e = 3 n 1 ’ V1V1 ss g R2R2 1 + 2 ls22 ls2 2 g R2R2 n 2 ’ 2 2 C e = 3 n 1 ’ V1V1 ss g l s R2R2 1 + ls ls 1 R2R2

80
ls ls R2R2 g 0 = C e est max pour g = g 0 soit C e max = K V 1 2 2 2 C e = V1V1 g 1 + g g0g0 g0g0 K.. k V 1 2 f 2. 2 = = k ’. V12V12 f2f2

81
g << g 0 C e = K V 1 2 g g0g0 g0g0 g g0g0 g >> g 0 C e = K V 1 2 g CeCe NsNs

82
zone de fonctionnement en générateur zone de fonctionnement en moteur NsNs N CeCe g =1 g = 0 C max

83
Influence d ’une variation de la tension d ’alimentation statorique sur la caractéristique mécanique

84
N CeCe C max (V 1 =U) C max (V1=V) NsNs
 C max (V1=V) NsNs")
85
N CeCe NsNs couple au démarrage en Y couple au démarrage en

86
KM3 KM1 KM2 KM1 M 3 ~ Démarreur étoile/triangle

87
Influence d ’une variation de la fréquence des tensions statoriques

88
50 25 75 100 CeCe N V/f = cte C max = cte

89
Influence d ’une variation de la résistance rotorique sur la caractéristique mécanique

90
N CeCe R2R2 R ’ 2 > R 2 R ’’ 2 > R ’ 2 C max =cte

91
N R2R2 R ’’’ 2 R ’’’ 2 + R 2 couple au démarrage CeCe

92
N CeCe R ’’ 2 + R 2 R ’’ 2 R2R2

93
CeCe R ’ 2 R ’ 2 + R 2 R2R2

94
CeCe R2R2 R2R2

96
N R2R2 R ’’’ 2 R ’’’ 2 + R 2 couple au démarrage CeCe couple résistant

97
N CeCe C mot - C résist = J dd dt couple résistant Vitesse atteinte = 0

98
N CeCe R ’’ 2 + R 2 R ’’ 2 R2R2 couple résistant

99
N CeCe C mot - C résist = J dd dt R ’’ 2 + R 2 couple résistant Vitesse atteinte = 0

100
CeCe R ’ 2 R ’ 2 + R 2 R2R2

101
N CeCe couple résistant C mot - C résist = J = 0 C mot - C résist = J dd dt >0 C mot - C résist = J dd dt >0 C mot - C résist = J dd dt >0 C mot - C résist = J dd dt >0 C mot - C résist = J dd dt >0 C mot - C résist = J dd dt >0 C mot - C résist = J dd dt >0

102
CeCe R2R2 R2R2 couple résistant

103
N CeCe C mot - C résist = J dd dt R ’ 2 + R 2 couple résistant R2R2 = 0

104
Freinage du moteur asynchrone

105
Lors de l ’arrêt d ’une machine, il est souvent nécessaire de réduire le temps de décélération dû à la seule inertie des parties tournantes. Le freinage électrique offre l ’avantage de ne mettre en œuvre aucune pièce d ’usure. Dans certains cas, l ’énergie mécanique récupérée peut être réinjectée sur le réseau électrique.

106
Freinage du moteur asynchrone Freinage par injection de courant continu

107
Freinage par injection de courant continu d ’un moteur à cage d ’écureuil : M 3 ~ freinage M 3 ~ fonctionnement

108
Freinage par injection de courant continu CeCe N 0 couple de freinage

109
Réglage du freinage par injection de courant continu d ’un moteur à cage d ’écureuil : CeCe N 0 couple de freinage

110
M 3 ~ Freinage par injection de courant continu d ’un moteur à rotor bobiné M 3 ~ démarrage M 3 ~ fonctionnement M 3 ~ freinage

111
Réglage du freinage par injection de courant continu d ’un moteur à rotor bobiné : CeCe N 0 couple de freinage

112
Freinage du moteur asynchrone Freinage par contre courant

113
M 3 ~ Freinage par contre-courant d ’un moteur à rotor bobiné M 3 ~ démarrage M 3 ~ fonctionnement M 3 ~ freinage

114
Freinage en contre courant d ’un moteur à cage M 3 ~ fonctionnement M 3 ~ freinage

115
Freinage par contre-courant couple de freinage CeCe N

116
Freinage du moteur asynchrone Freinage hyper synchrone

117
zone de fonctionnement en générateur zone de fonctionnement en moteur NsNs N CeCe g =1 g = 0 C max couple de freinage Freinage hyper synchrone ou « naturel »

118
CeCe N0 couple de freinage N ’ N ’’ De l ’utilité de réduire la résistance insérée au rotor lors du freinage hyper synchrone :

119
That’s all Folks !






>")




>")




>")






>")
