Télécharger la présentation
1
Cours de Technologie RAUSIN Bernard

2
Chapitre 3 Les Fraiseuses

3
Fraiseuse

4
Fraiseuse

5
Fraiseuse

6
Les fraiseuses La réalisation d'une pièce = succession ordonnée d'usinage. Fraisage : l'outil est en rotation, il engendre le mouvement de coupe L'outil est appelé : Fraise Caract. des pièces choix structure machine.

7
1. Les différentes structures
Les fraiseuses universelles ou d'outillage à broche horizontale ou verticale. Ces machines n'autorisent que les usinages paraxiaux. 1 seul moteur qui commande un mouvement à la fois.

8
Structure à console

9
Accessoires Tête universelle Tête à mortaiser Plateau circulaire
Appareil diviseur Rem : temps de montage important pour fabrication unitaire ou très petite série

10
Accessoires Table indexable (tournante) permet l'usinage de plusieurs faces de la pièce sans démontage/remontage. Règles de mesure sur les mouvements : lecture des coordonnées suivant X,Y et Z (Facilite le travail) Affichage digital plus facile que le travail au vernier* ( 0,001 mm affiché) Rien à voir avec la précision de la machine.
 Affichage digital plus facile que le travail au vernier* ( 0,001 mm affiché) Rien à voir avec la précision de la machine.")
11
La fabrication en série
a provoqué l'automatisation de l'usinage. Si petite ou moyenne série : montage d'usinage ± sophistiqué Utilisation de pinces d'usinage : - fixation rapide des pièces - guidage des forets. En tournage : - copiage d'une pièce modèle - tours automatiques commande par cames.

12
La fabrication en série
Si très grande série : machines transfert tours multibroches à commande numérique (C.N.) moins de cames.
 moins de cames.")
13
Machine transfert

14
Machine transfert

15
La fabrication en série
Si série très importante : machines conçue en fonction de la pièce pour un modèle de pièce : une machine Suivant la complexité de la pièce : poste fixe transfert rectiligne transfert circulaire Quand c'est possible, ces machines sont construites à l'aide d'éléments normalisé

16
La machine transfert C'est l'opération la plus longue qui fixe la cadence du transfert. le temps de fabrication d'une pièce Rem: il faut répartir les temps d'usinage aussi également que possible Les machines transfert deviennent flexible grâce à la C.N.

17
La commande numérique grande souplesse de programmation de la trajectoire de l'outil. choix permanent de l'outil adéquat changeur d'outil. fichier C.A.O.

18
Changeur d'outils

19
Options Pour l'usinage des surfaces complexes
table tournante à C.N. broche inclinable changeur d'outil table tournante inclinable broche orientable autour de 2 axes système TRIPODE ou HEXAPODE, etc... La machine-outil devient un centre d'usinage ou une cellule flexible d'usinage.

20
Tripode

21
Réalisation de la pièce complète en un minimum de montages.
La commande numérique But : Réalisation de la pièce complète en un minimum de montages.

22
Exemples*

23
Tendance Utiliser des éléments modulaires de fixation pourvus de grilles de repérage et de fixation. étude des bridages assistés par ordinateur. changement de pièce automatique par robot.

24
= Fixation d'une pièce sur une table ou un plateau d'usinage.
Bridage* = Fixation d'une pièce sur une table ou un plateau d'usinage.

25
Plateau magnétique

26
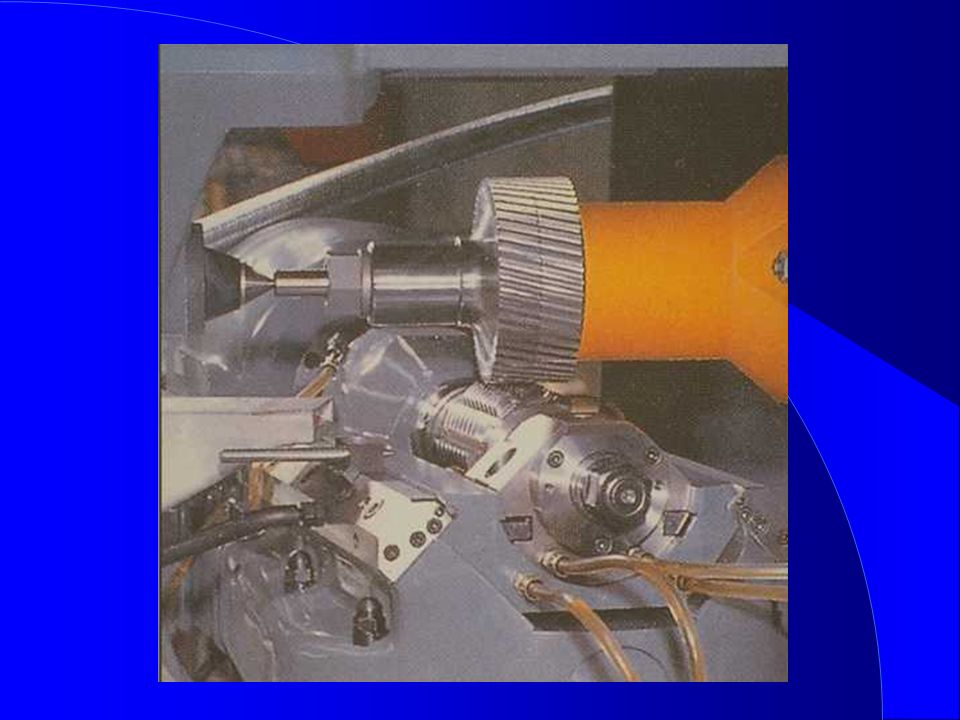
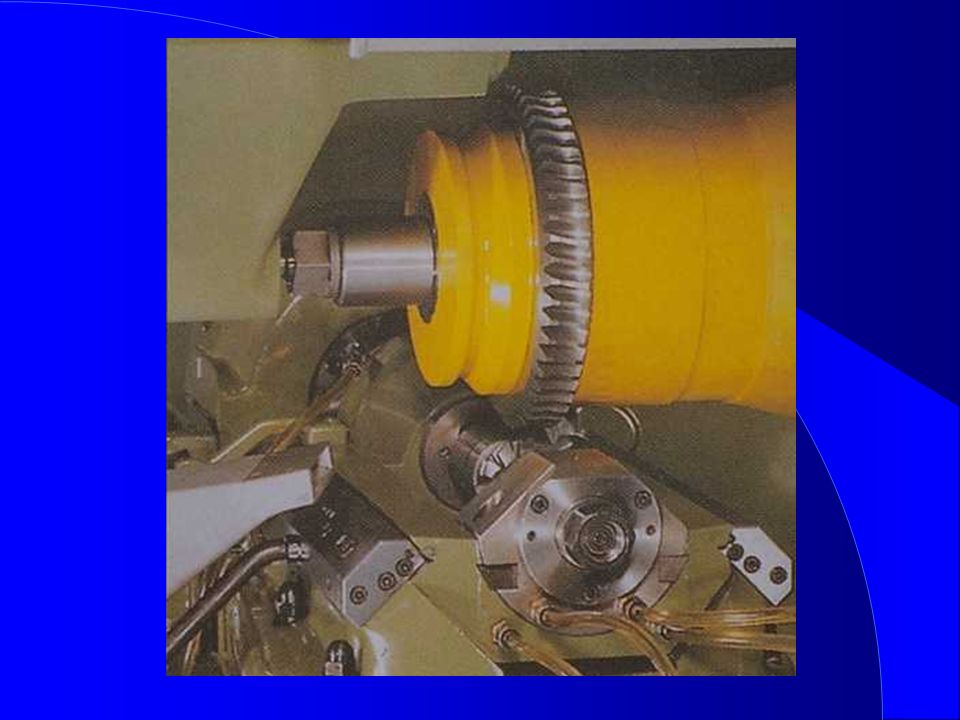
Taillage des roues dentées par génération engrenages
Machines spéciales Taillage des roues dentées par génération engrenages

29
2. Les différentes commandes
2.1. Commande manuelle : La qualité du produit dépend de l'opérateur Mouvement de coupe *: Mouvement d'avance *: de la broche Gambin. Tête universelle Rem : les positions particulières des broches sont généralement repérées par des goupilles coniques*

30
Montage broche HURE

31
2.2. Commande par copiage A partir d'une pièce modèle. On peut la copier en utilisant des outils simples*.

32
2.3. Commande hydraulique

33
2.3.Commande par came 1 came par mouvement
1 tour de came = 1 pièce réalisée Le problème est de déterminer la forme des cames, leur pente et le décalage angulaire des cames l'une par rapport à l'autre.

34
2ème exemple de mouvement de coupe et d'avance*

35
2.6. Commande numérique Procédé permettant la conduite automatique d'une machine par l'introduction d'informations alphanumériques codées. Les informations peuvent être introduites : manuellement bande perforée disquette liaison RS 232, RS 485, ...

36
2.6.1. Boucle de commande servomécanisme : - en B.O. - en B.F.
en B.O. : position de l'organe commandé pas contrôlée (moteur pas à pas) en B.F. : position contrôlée (capteur) Des boucles de commande pour chaque mouvement de la M.O.
 en B.F. : position contrôlée (capteur) Des boucles de commande pour chaque mouvement de la M.O.")
37
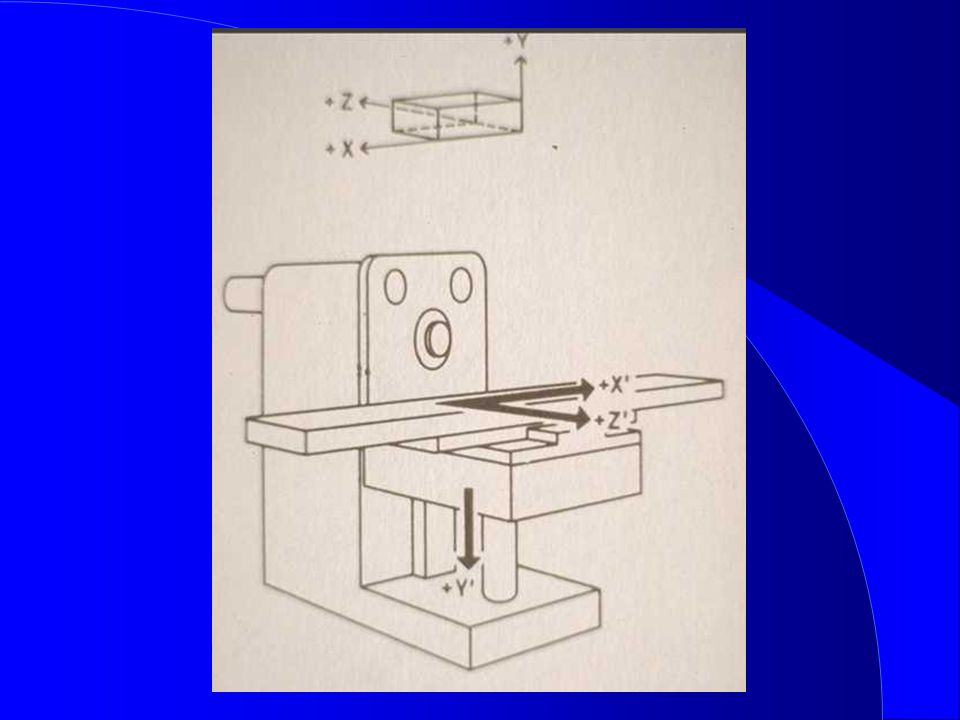
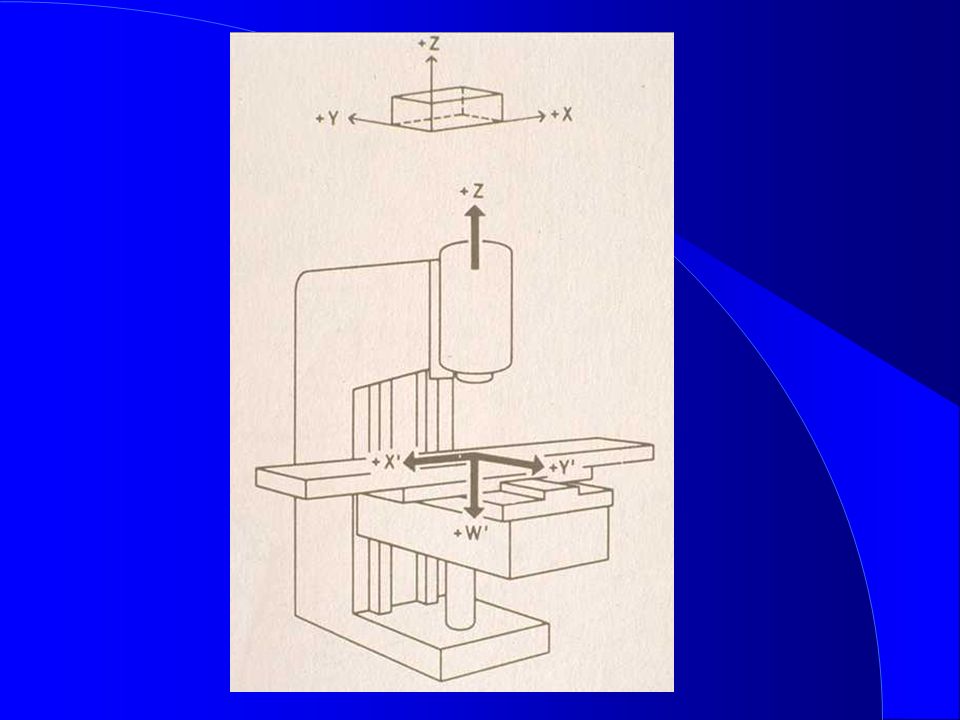
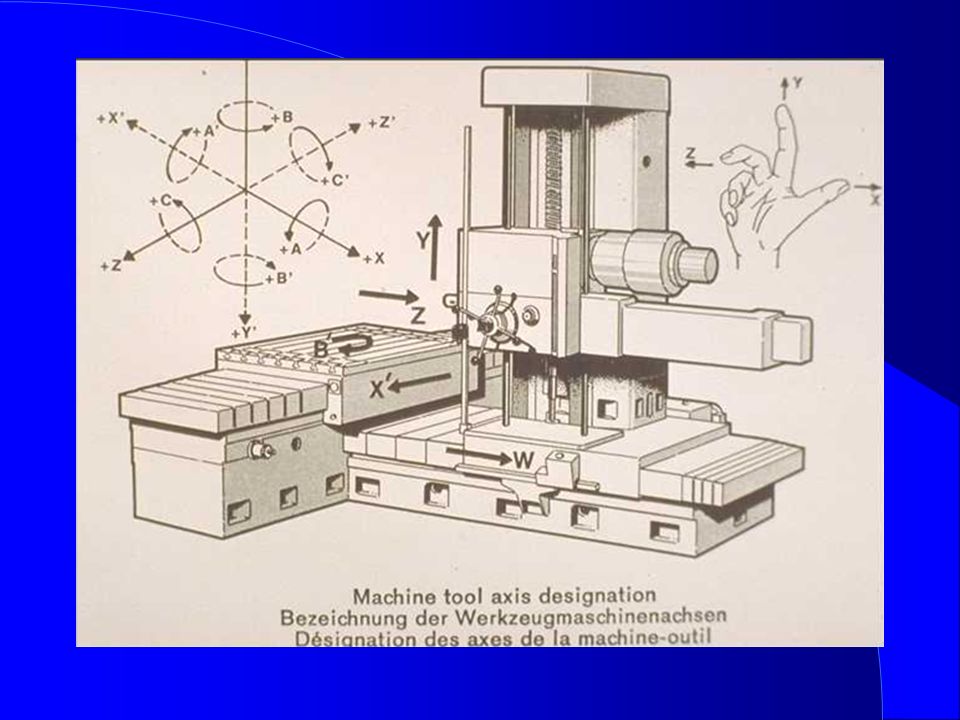
Axes : x, y et z axe z = axe de la broche z > 0 = accroissement des coordonnées de la pièce. axe x = parallèle au bridage axe y = forme un trièdre de sens direct x, y et z = l'outil x', y' et z' = la pièce = -x, -y et -z

38
Main droite

42
Système de mesure Mesure directe : capteur linéaire 2 parties : 1 fixée à l'organe mobile 1 fixée au bâti Mesure indirecte : capteur tournant ou impulseur rotatif calcul du déplacement. La mesure est influencée par la rigidité par les jeux*

43
Système de mesure Mesure absolue : coordonnées mesurées par rapport à une origine fixe. Mesure incrémentale : déplacement mesuré en prenant la position précédente comme origine.

44
Système de mesure Mesure analogique : une tension ou un courant proportionnel au déplacement 0 -> 10 V 0 -> 20 mA Mesure numérique : incrémental : compte ou décompte des impulsions. absolu : règle codée d'où une valeur numérique.

45
Type de commande Commande point à point : pas d'usinages entre les déplacements ( perceuse,poinçonneuse) Commande paraxiale : mouvement parallèle à un axe. Commande continue ou de contournage : peut commander tous les axes en même temps. Jusqu'à 6 axes.

46
2.6.4. Programmation manuelle
1. gamme opératoire 2. choix de la M.O. 3. localisation de la pièce sur la machine 4. modifier la cotation si nécessaire 5. choix des outils 6. paramètres de coupe 7. mode opératoire : liste des opérations 8. coordonnées nécessaires traject. outil

47
2.6.4. Programmation manuelle
9. transcrire en langage codé 10. introduire le programme 11. contrôler le programme 12. réaliser la première pièce 13. contrôle 14. corrections si nécessaire 15. lancer le programme

48
2.6.5. Programmation automatique
1. dessin de la pièce 2. choix des outils, des paramètres de coupe, de la matière 3. l'ordinateur traite l'usinage de la pièce 4. visualisation à l'écran de l'usinage 5. usinage de la première pièce 6. contrôle 7. corrections 8. lancer la production

49
C.F.A.O. CAD - CAM Conception et fabrication assistée par ordinateur
Computer Aided Design Computer Aided manufacturing

50
Exemples de pièces*

51
2.6.6. Possibilités offertes par la C.N.
introduction de la cotation systèmes d'axes image miroir cycles fixes d'usinages programmation paramétrée succession des passes (ex. une poche) mesures et contrôle compensation de longueur et de diamètre d'outil visualisation
 mesures et contrôle. compensation de longueur et de diamètre d outil. visualisation.")
52
2.6.7. Adaptation de la M.O. à la C.N.
Problème de la précision : 0,01 0,001 Précision = f ( rigidité, vibrations, jeux, inertie déport thermique) Pour amortir mieux les vibrations : Bâti en granit ou en béton synthétique Déplacement rapide de l'outil : 100 m/min Accélération : 2 à 3 g Equilibrage des masses en rotation Surveille les sources de chaleur : moteur, frottements, copeaux
 Pour amortir mieux les vibrations : Bâti en granit ou en béton synthétique. Déplacement rapide de l outil : 100 m/min. Accélération : 2 à 3 g. Equilibrage des masses en rotation. Surveille les sources de chaleur : moteur, frottements, copeaux.")
53
2.6.7. Adaptation de la M.O. à la C.N.
Glissières de grande précision et à faible frot. (evite le stick-slip) Guidages linéaires à recirculation de gallets (sinon : délestage hydrostatique) Paliers de broches surdimensionné (rigidité) roulements à billes à contact oblique si grande vitesse roulement en céramique ou palier magnétique si UGV Entraînement des broches et des avances : mot. asyn. ou servomot. commandé par V.F.
 Guidages linéaires à recirculation de gallets (sinon : délestage hydrostatique) Paliers de broches surdimensionné (rigidité) roulements à billes à contact oblique si grande vitesse roulement en céramique ou palier magnétique si UGV. Entraînement des broches et des avances : mot. asyn. ou servomot. commandé par V.F.")
54
Vis à billes*

55
3. Le fraisage en roulant Trajectoire de la pointe : cycloïde à pas raccourci surface pourvue d'ondulations Effort de coupe pas constant*

56
3. Le fraisage en roulant Conditions de copeau taillé minimum
Quand l'épaisseur du copeau tend vers une épaisseur minimum au début de la coupe Effort de coupe pas constant : flexion outil, mandrin, pièce "pas" des ondulations = avance par tour de la broche Dent la plus proéminente engendre la surface

57
3. Le fraisage en roulant Amélioration de l'état de surface :
Affûtage et réglage des fraises Positionnement correct de la fraise/pièce (il faut toujours une dent qui coupe) Augmentation de la rigidité Choix judicieux de la fraise Limiter la vitesse d'avance (copeau tail. min.) Matériaux de coupe à vitesse de coupe élevée
 Augmentation de la rigidité. Choix judicieux de la fraise. Limiter la vitesse d avance (copeau tail. min.) Matériaux de coupe à vitesse de coupe élevée.")
58
3.1. Fraisage en roulant en opposition*
3.2. Fraisage en roulant en concordance ou en avalant*

59
4. Le fraisage en bout Surface usinée est perpendiculaire à l'axe de rotation de la fraise. Utilise un bedon. Suivant la position de la fraise par rapport à la pièce, le mouvement d'avance peut être soit surtout en concordance, soit surtout en avalant.








. Elle donne aux pièces leur section.>")












