Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
COUR DE TRAITEMENT NUMERIQUE DES SIGNAUX
CENTRE UNIVERSITAIRE DE N’ZEREKORE DEPARTEMENT DE PHYSIQUE COUR DE TRAITEMENT NUMERIQUE DES SIGNAUX 20h CM ; 25h TP. Présenté par Mr. Mazoughou GOEPOGUI Tel: /

2
CONTENU ET CALENDRIER. Jours Contenu 27/01 Généralité 28/01 Outils mathématiques du traitement numérique des signaux. 29/01 30/01 Les signaux échantillonnés. 31/01 01/02 Les filtres numériques. 02/02

3
I. GENERALITE. I.1. Définitions de base. Un signal désigne l'information relative à une grandeur physique qui évolue dans le temps (courant, tension, force, température, pression, etc.). L'obtention des signaux électriques à partir des variations d'une grandeur naturelle se fait à l'aide d'un capteur ou d'un transducteur.
. L obtention des signaux électriques à partir des variations d une grandeur naturelle se fait à l aide d un capteur ou d un transducteur.")
4
Le bruit est défini comme tout phénomène perturbateur gênant la perception ou l’interprétation d’un signal, par analogie avec les nuisances acoustiques (interférence, bruit de fond, etc.).
.")
5
La théorie du signal a pour objectif fondamental la "description mathématique" des signaux afin de mettre en évidence ses principales caractéristiques (distribution fréquentielle, énergie, etc.) et d’analyser les modifications subies lors de la transmission ou du traitement.
 et d’analyser les modifications subies lors de la transmission ou du traitement.")
6
Le traitement du signal est la discipline qui, s’appuyant sur les ressources de l’électronique, de l’informatique et de la physique appliquée, a pour objet l’élaboration ou l’interprétation des signaux porteurs d’information.

7
Les fonctions du traitement du signal peuvent se diviser en deux catégories : l’élaboration des signaux (incorporation des informations) et l’interprétation des signaux (extraction des informations). Les principales fonctions intégrées dans ces deux parties sont les suivantes :

8
Élaboration des signaux :
Synthèse : Création de signaux de forme appropriée en procédant par exemple à une combinaison de signaux élémentaires ; Modulation: moyen permettant d’adapter un signal aux caractéristiques d’une voie de transmission ; Codage : traduction en code binaire (quantification), etc. ;
, etc. ;")
9
Interprétation des signaux :
Filtrage : élimination de certaines composantes indésirables ; Détection : extraction du signal d’un bruit de fond (corrélation) ; Identification : classement d’un signal dans des catégories préalablement définies ; Analyse : isolement des composantes essentielles ou utiles d’un signal de forme complexe (transformée de Fourier) ; Mesure : estimation d’une grandeur caractéristique d’un signal avec un certain degré de confiance (valeur moyenne, etc.)
 ; Identification : classement d’un signal dans des catégories préalablement définies ; Analyse : isolement des composantes essentielles ou utiles d’un signal de forme complexe (transformée de Fourier) ; Mesure : estimation d’une grandeur caractéristique d’un signal avec un certain degré de confiance (valeur moyenne, etc.)")
10
I.3. Classification des signaux.
I.3.1. Classification morphologique.

11
I.3. Classification des signaux.
Il existe différents modes de classification. I.3.1. Classification morphologique. Les signaux analogiques ou continus sont des signaux qui peuvent être représentés par des fonctions continues.

12
Les signaux numériques ou discret sont des signaux qui peuvent être représentés par des suites de nombres. Les signaux rencontrés dans la nature sont généralement des signaux analogiques. Tout traitement numérique (discret) de ces signaux nécessite au préalable une opération de numérisation.
 de ces signaux nécessite au préalable une opération de numérisation.")
13
I.3.2. Classification spectrale.
On classe les signaux suivant la bande de fréquence qu’ils occupent. On distingue les signaux à variation lente ou signaux basse fréquence et les signaux à variation rapide ou signaux haute fréquence.

14
I.3.2. Classification typologique.

15
I.3.2. Classification typologique.
Un signal déterministe est un signal qui peut être prédit par un modèle mathématique connu. les signaux périodiques (x(t) = x(t + T) où T est la période du signal) les signaux apériodiques. Un signal aléatoire est un signal qui a un comportement imprévisible. On le décrit grâce à des outils statistiques (densité de probabilités, moyenne, variance, etc.).
 = x(t + T) où T est la période du signal) les signaux apériodiques. Un signal aléatoire est un signal qui a un comportement imprévisible. On le décrit grâce à des outils statistiques (densité de probabilités, moyenne, variance, etc.).")
16
I.5. Avantages et inconvénients du TNS.
La reproductibilité des systèmes ; L’absence de dérive en temps ou en température ; L’absence de réglages compliqués ; La possibilité de traitement adaptatif ; Etc.

17
I.5.2. Inconvénients. Coût : élevé pour des réalisations simples ; Vitesse : bande passante large = vitesse de calcul élevé ; Complexité : réalisation à la fois matérielle et logiciel ;

18
I.6. Architecture d’un système de TNS

19
II. OUTILS MATHEMATIQUES DU TRAITEMENT NUMERIQUE DES SIGNAUX.
II.1. Eléments sur les distributions. Définition (Fonction généralisée de Dirac). On définit la distribution δ(t-t0) (ou fonction généralisée) de Dirac au point t0 la distribution telle que :
. On définit la distribution δ(t-t0) (ou fonction généralisée) de Dirac au point t0 la distribution telle que :")
20
La distribution δ(t-t0) de Dirac est une fonction généralisée nulle partout sauf en t0, et infiniment grande en t0, si bien que, lorsqu'on la multiplie par une fonction test ϕ(t) et que l'on intègre sur T, on obtient la relation précédente.
 de Dirac est une fonction généralisée nulle partout sauf en t0, et infiniment grande en t0, si bien que, lorsqu on la multiplie par une fonction test ϕ(t) et que l on intègre sur T, on obtient la relation précédente.")
21
Définition 2.1.2. (Peigne de Dirac).
On définit le peigne de Dirac, la distribution Φ(t-t0) telle que : 𝜱,𝝓 = 𝑻 𝜱 𝒕− 𝒕 𝟎 𝝓 𝒕 𝒅𝒕 = 𝑻 𝒏=−∞ ∞ 𝜹(𝒕−𝒏 𝒕 𝟎 )𝝓(𝒕)𝒅𝒕 = 𝒏=−∞ ∞ 𝜹(𝒏 𝒕 𝟎 ) La fonction généralisée ou peigne de Dirac permet de prélever des échantillons à intervalle régulier.
 telle que : 𝜱,𝝓 = 𝑻 𝜱 𝒕− 𝒕 𝟎 𝝓 𝒕 𝒅𝒕 = 𝑻 𝒏=−∞ ∞ 𝜹(𝒕−𝒏 𝒕 𝟎 )𝝓(𝒕)𝒅𝒕 = 𝒏=−∞ ∞ 𝜹(𝒏 𝒕 𝟎 ) La fonction généralisée ou peigne de Dirac permet de prélever des échantillons à intervalle régulier.")
22
II.3. Séries de Fourier. La transformée de Fourier est l’un des outils, si non l’outil fondamental du traitement des signaux. Elle permet de caractériser les filtre et faciliter leur conception. Les séries de Fourier s'appliquent aux signaux périodiques tandis que la transformée de Fourier concerne les signaux apériodiques.

23
Définition 2.3.1. (Décomposition en séries de Fourier).
Soit une fonction périodique f(t) de période T. La décomposition en séries de Fourier de la fonction g(t) est : 𝒈 𝒕 = 𝒂 𝟎 + 𝒏≥𝟏 [ 𝒂 𝒏 𝐜𝐨𝐬 𝟐𝝅𝒏𝒕 𝑻 + 𝒃 𝒏 𝐬𝐢𝐧 𝟐𝝅𝒏𝒕 𝑻 ]
 de période T. La décomposition en séries de Fourier de la fonction g(t) est : 𝒈 𝒕 = 𝒂 𝟎 + 𝒏≥𝟏 [ 𝒂 𝒏 𝐜𝐨𝐬 𝟐𝝅𝒏𝒕 𝑻 + 𝒃 𝒏 𝐬𝐢𝐧 𝟐𝝅𝒏𝒕 𝑻 ]")
24
Les coefficients a0, an et bn sont donnés par les formules d’Euler :
𝒂 𝟎 = 𝟏 𝑻 −𝑻/𝟐 𝑻/𝟐 𝒈 𝒕 𝒅𝒕 𝒂 𝒏 = 𝟐 𝑻 −𝑻/𝟐 𝑻/𝟐 𝒈 𝒕 𝐜𝐨𝐬 𝟐𝝅𝒏𝒕 𝑻 𝒅𝒕 𝒃 𝒏 = 𝟐 𝑻 −𝑻/𝟐 𝑻/𝟐 𝒈 𝒕 𝐬𝐢𝐧 𝟐𝝅𝒏𝒕 𝑻 𝒅𝒕 a0 est appelé la composante continu ou valeur moyenne du signal périodique g(t).
.")
25
Propriété 2.3.1. (fonction paire, impaire).
𝒈 𝒕 = 𝒏≥𝟏 [ 𝒃 𝒏 𝐬𝐢𝐧 𝟐𝝅𝒏𝒕 𝑻 ] 𝒈 𝒕 = 𝒂 𝟎 + 𝒏≥𝟏 [ 𝒂 𝒏 𝐜𝐨𝐬 𝟐𝝅𝒏𝒕 𝑻 ]

26
II.4. Transformée de Fourier.
Définition (Transformée de Fourier). On appelle transformée de Fourier de la fonction g(t), la fonction notée 𝑔 (𝜔) telle que : 𝒈 𝝎 = −∞ +∞ 𝒈(𝒕) 𝒆 (−𝒋𝝎𝒕) 𝒅𝒕
. On appelle transformée de Fourier de la fonction g(t), la fonction notée 𝑔 (𝜔) telle que : 𝒈 𝝎 = −∞ +∞ 𝒈(𝒕) 𝒆 (−𝒋𝝎𝒕) 𝒅𝒕.")
27
II.6. Transformées de Laplace.
Définition (La transformée de Laplace). Soit une fonction f(t) causale i.e f(t)=0 pour t<0, On appelle transformée de Laplace de la fonction f(t), la fonction F(p) (p étant un nombre complexe) définie par : 𝑭 𝒑 = −∞ +∞ 𝒇 𝒕 𝒆 −𝒑𝒕 𝒅𝒕 Avec 𝐥𝐢𝐦 𝒕→∞ 𝒇 𝒕 𝒆 −𝒑𝒕 =𝟎
. Soit une fonction f(t) causale i.e f(t)=0 pour t<0, On appelle transformée de Laplace de la fonction f(t), la fonction F(p) (p étant un nombre complexe) définie par : 𝑭 𝒑 = −∞ +∞ 𝒇 𝒕 𝒆 −𝒑𝒕 𝒅𝒕. Avec. 𝐥𝐢𝐦 𝒕→∞ 𝒇 𝒕 𝒆 −𝒑𝒕 =𝟎.")
28
II.7. La Transformée de Fourier à Temps Discret.
Définition. (Transformée de Fourier à Temps Discret). On appelle TFTD de x[n], la fonction X(ν) telle que : 𝑿 𝝂 = −∞ +∞ 𝒙 𝒏 𝒆 −𝟐𝒋𝝅𝝂𝒏 Avec ν=f/Fe la fréquence réduite, f la fréquence en Hertz, et Fe la fréquence d'échantillonnage (Fe = 1/Te où T est le pas de temps entre deux échantillons).
. On appelle TFTD de x[n], la fonction X(ν) telle que : 𝑿 𝝂 = −∞ +∞ 𝒙 𝒏 𝒆 −𝟐𝒋𝝅𝝂𝒏. Avec ν=f/Fe la fréquence réduite, f la fréquence en Hertz, et Fe la fréquence d échantillonnage (Fe = 1/Te où T est le pas de temps entre deux échantillons).")
29
III. LES SIGNAUX ECHANTILLONNES. III.1. L’échantillonnage.
III.1.1. Modélisation. L’échantillonnage consiste à prélever la valeur du signal analogique x(t) aux instants nTE. L’échantillonneur est représenté par un interrupteur que l’on ferme pendant une durée ε très courte aux instants nTE. TE
 aux instants nTE. L’échantillonneur est représenté par un interrupteur que l’on ferme pendant une durée ε très courte aux instants nTE. TE.")
30
III.1.2. Spectre du signal échantillonné.
Pour simplifier, le signal échantillonné peut donc être assimilé à des impulsions rectangulaires d’amplitude x(nTE). h(t) -ε/2 +ε/2 TE 2TE
. h(t) -ε/2. +ε/2. TE. 2TE.")
31
La figure ci-dessous donne alors le spectre de xech(t).
Xech(f) 𝜀𝑋 𝑇 𝐸 𝑠𝑐 𝑛 𝜔 𝐸 𝜀 2 𝜀𝑋 𝑇 𝐸 f FE-f FE FE+f 2FE-f 2FE+f
 𝜀𝑋 𝑇 𝐸 𝑠𝑐 𝑛 𝜔 𝐸 𝜀 2. 𝜀𝑋 𝑇 𝐸. f. FE-f. FE. FE+f. 2FE-f. 2FE+f.")
32
f X(f) fM FE Xech(f) Sc() fM FE- fM FE FE+ fM 2FE- fM 2FE+ fM f L’échantillonnage produit donc une reproduction du spectre autour des fréquences nFE.

33
Repliement du spectre. III.1.3. Condition de restitution du signal.
Xech(f) fM FE- fM FE FE+ fM 2FE- fM 2FE+ fM f 2FE FE/2 Repliement du spectre.
 fM. FE- fM. FE. FE+ fM. 2FE- fM. 2FE+ fM. f. 2FE. FE/2. Repliement. du spectre.")
34
Pour éviter le phénomène de repliement, il faut avoir fM ≤ FE - fM soit :
Le théorème de l’échantillonnage, appelé aussi théorème de Shannon s’énonce ainsi : Soit x(t) un signal continu dont le spectre est tel que 𝑿(𝒇) =𝟎 si f > fc, pour échantillonner ce signal et le reconstitué sans altération, la fréquence d'échantillonnage FE doit être supérieure au double de la plus grande fréquence du spectre. Ceci est une condition limite qui supposerait l’utilisation d’un filtre de restitution idéal. En pratique, on choisit un rapport FE/fM toujours supérieur à 2. Pour les CD par exemple, on échantillonne à 44kHz sachant que la bande passante de l’oreille humaine est limitée à 17kHz en moyenne ; le rapport FE/fM est alors d’environ 2,6.
 un signal continu dont le spectre est tel que 𝑿(𝒇) =𝟎 si f > fc, pour échantillonner ce signal et le reconstitué sans altération, la fréquence d échantillonnage FE doit être supérieure au double de la plus grande fréquence du spectre. Ceci est une condition limite qui supposerait l’utilisation d’un filtre de restitution idéal. En pratique, on choisit un rapport FE/fM toujours supérieur à 2. Pour les CD par exemple, on échantillonne à 44kHz sachant que la bande passante de l’oreille humaine est limitée à 17kHz en moyenne ; le rapport FE/fM est alors d’environ 2,6.")
35
III.2. Le blocage. En pratique, on réalise un blocage du signal échantillonné, c’est-à-dire le maintien du niveau de chaque échantillon, pendant TE ; le bloqueur est alors dit d’ordre 0 (pas de variation du signal entre deux instants d’échantillonnage). Cette opération peut être réalisée au moyen d’un condensateur.
. Cette opération peut être réalisée au moyen d’un condensateur.")
36
TE C Le signal échantillonné bloqué est ainsi constitué de marche d’escalier. La phase de blocage dure TE, ce qui permet au CAN de réaliser la quantification de l’échantillon.

37
III.2.1. Exemple d’échantillonneur bloqueur.

38
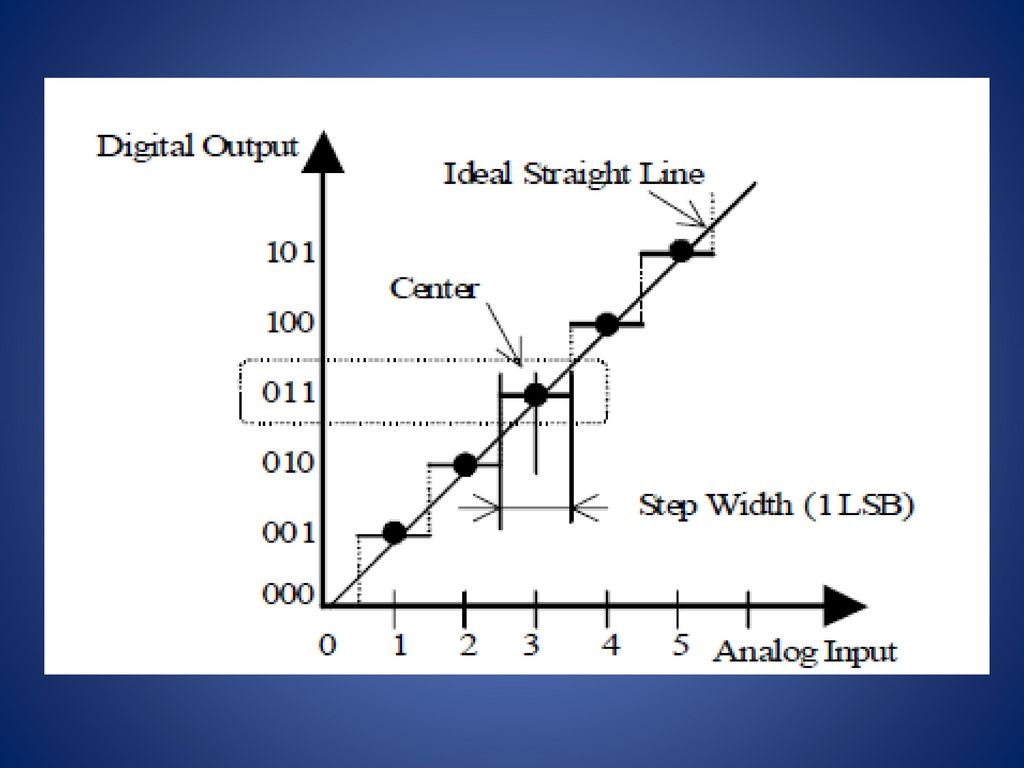
III.3. La quantification. Le signal échantillonné - bloqué peut, à ce stade, être converti sous forme binaire (numérique) pour être stocké. Ce codage s'appelle la quantification. Le rôle de la quantification est de donner une image binaire d’un signal analogique. A chaque niveau de tension est associée une valeur binaire codée sur n bits. On a ainsi un pas de quantification : 𝑞= 2 𝑉 𝑚 2 𝑛
 pour être stocké. Ce codage s appelle la quantification. Le rôle de la quantification est de donner une image binaire d’un signal analogique. A chaque niveau de tension est associée une valeur binaire codée sur n bits. On a ainsi un pas de quantification : 𝑞= 2 𝑉 𝑚 2 𝑛.")
40
III.3.2. Choix du nombre de bits de quantification.
III Choix classique. Dans le cadre d’une simple acquisition, on peut se contenter de choisir ‘n’ vis à vis de la résolution souhaitée.

41
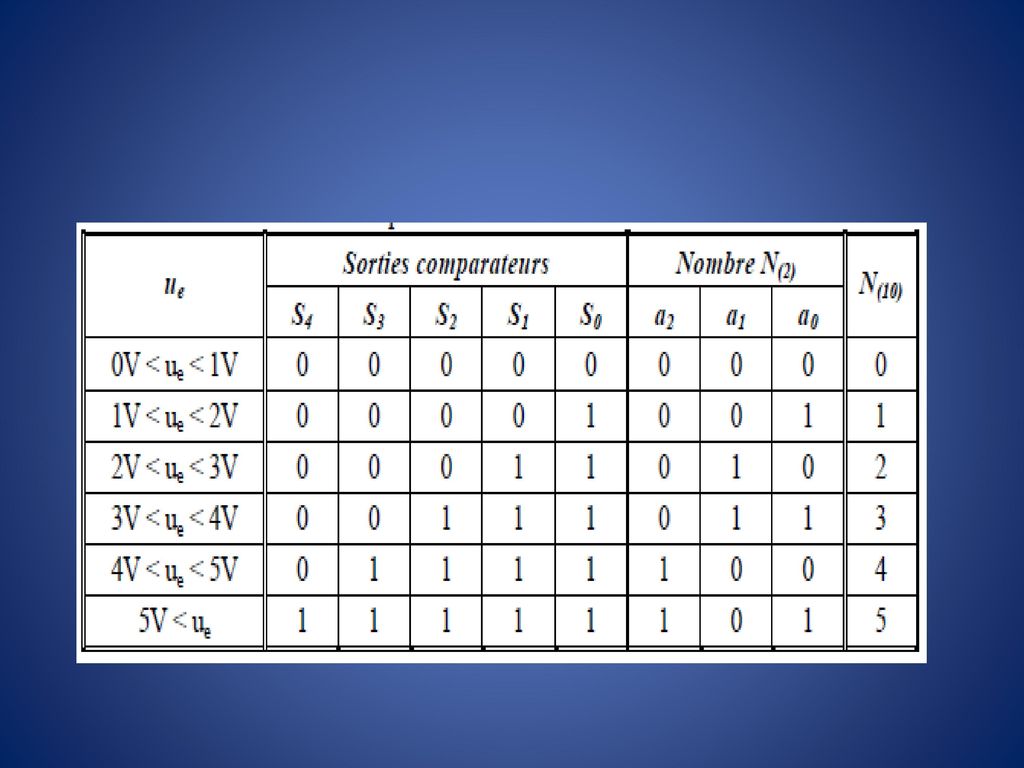
Exemple de CAN: CAN à comparateur en échelle (flash).
.")
43
Exemples de CNA: CNA à résistances pondérées.

44
IV. LES FILTRES NUMERIQUES.
Pour les traitements lourds, comme le filtrage des signaux vidéo par exemple, les structures numériques remplacent avantageusement les circuits analogiques. Les méthodes de synthèses consiste, en pratique, à trouver la fonction de transfert isochrone (en jω) du filtre analogique puis de la transposer dans le plan des z afin d’établir l’algorithme à programmer.
 du filtre analogique puis de la transposer dans le plan des z afin d’établir l’algorithme à programmer.")
45
IV.1. Définitions. IV.1.1. Filtre numérique. Nous notons un signal numérique de la façon suivante x[n], où n désigne le nième échantillon du signal x. En fait, x[n] est une suite de nombres indexés par l'entier n. On appellera filtre numérique, tout dispositif qui fait correspondre à un signal d'entrée numérique x[n] un signal de sortie numérique y[n] : x[n]→F→y[n]

46
IV.1.2. Filtre numérique linéaire.
On considère un filtre F qui agit de la façon suivante : x1[n] →F→y1[n] x2[n] →F→y2[n] On dira que F est un filtre linéaire si à une combinaison linéaire en entrée λx1[n]+μx2[n] correspond la même combinaison linéaire des signaux de sortie : λy1[n] + μy2[n]. λx1[n] + μx2[n] → F → λy1[n] + μy2[n]

47
IV.1.3. Filtre numérique invariant par translation dans le temps.
On dira que F est un filtre numérique invariant par translation dans le temps si pour une entrée x[n] et une sortie y[n] (x[n] → F → y[n]), on a la propriété suivante : x[n - n0] → F → y[n - n0] Cette propriété traduit le fait que si on décale l'entrée d'une quantité n0, la sortie reste la même mais elle subit le même décalage : le filtre est donc invariant par translation dans le temps.
, on a la propriété suivante : x[n - n0] → F → y[n - n0] Cette propriété traduit le fait que si on décale l entrée d une quantité n0, la sortie reste la même mais elle subit le même décalage : le filtre est donc invariant par translation dans le temps.")
48
IV.2.2. Classification Suivant leur algorithme.
IV Filtre non récursif ou RIF. RIF = à Réponse Impulsionnelle Finie. L’algorithme de ces filtres est de la forme : 𝒚 𝒏 = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒙 𝒏−𝒌 Les filtres RIF peuvent être représentés par le schéma fonctionnel de la figure ci-contre. TE a1 a0 ∑ retard xn yn

49
Chaque échantillon de sortie yn dépend uniquement des échantillons d’entrée précédents.
Exemple 1 : 𝒚 𝒏 = 𝒙 𝒏 + 𝒙 𝒏−𝟏 𝟐

50
IV.2.2.1. Filtre récursif ou RII.
RII = à Réponse Impulsionnelle Infinie. L’algorithme de ces filtres est de la forme : 𝒚 𝒏 = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒙 𝒏−𝒌 + 𝒍=𝟎 𝑴 𝒃 𝒍 𝒚 𝒏−𝒍 Les filtres RII peuvent être représentés par le schéma fonctionnel de la figure ci-contre. TE a1 a0 ∑ retard b1 xn yn

51
Exemple 1 : 𝒚 𝒏 = 𝒙 𝒏 + 𝒚 𝒏−𝟏 𝟐 𝒚 𝒏 = 𝒙 𝒏 +𝟐 𝒚 𝒏−𝟏 La réponse impulsionnelle peut diverger, ces filtres ne sont donc pas toujours stables.

52
IV.3. Filtrage temporel. On appelle ici filtrage temporel, un filtre qui agit directement sur le signal d'entrée par une équation récurrente (combinaison linéaire des échantillons d'entrée xn et de sortie yn).
.")
53
IV.3.1. Equation récurrente.
La formulation de l’équation récurrente s’écrit comme suite : Filtre RIF : 𝒚 𝒏 = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒙 𝒏−𝒌 Filtre RII : 𝒚 𝒏 = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒙 𝒏−𝒌 + 𝒍=𝟎 𝑴 𝒃 𝒍 𝒚 𝒏−𝒍 L'étude du filtrage temporel va être facilité par l'introduction d'un nouvel outil : la transformée en z.

54
IV. 4. Filtrage fréquentielle.
IV.4.2. Fonction de transfert. IV Les filtres RIF. La fonction de transfert en z du filtre s'écrit ainsi : 𝑻 𝒛 = 𝒚(𝒛) 𝒙(𝒛) = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒛 −𝒌 T(z) possède un pôle en z = 0. Ainsi d'après les propriétés de stabilité, on en déduit qu'un filtre RIF est toujours stable.
 𝒙(𝒛) = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒛 −𝒌. T(z) possède un pôle en z = 0. Ainsi d après les propriétés de stabilité, on en déduit qu un filtre RIF est toujours stable.")
55
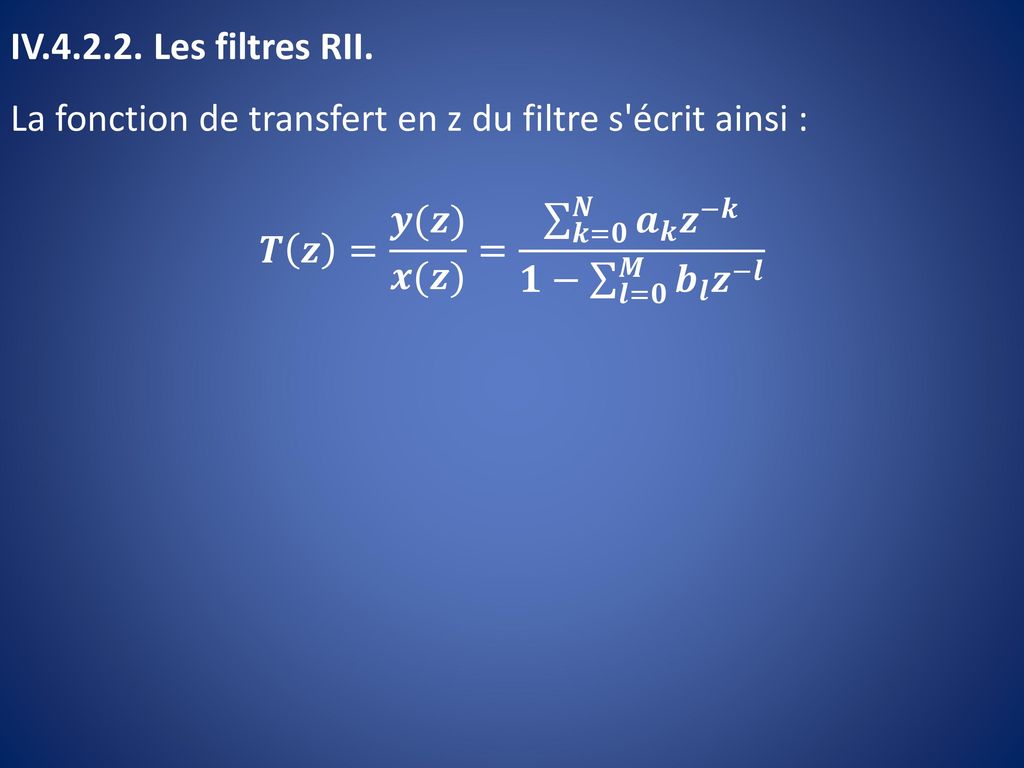
IV Les filtres RII. La fonction de transfert en z du filtre s'écrit ainsi : 𝑻 𝒛 = 𝒚(𝒛) 𝒙(𝒛) = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒛 −𝒌 𝟏− 𝒍=𝟎 𝑴 𝒃 𝒍 𝒛 −𝒍
56
IV.4.3. Réponse fréquentielle.
Pour passer de T(z) à la fonction de transfert isochrone 𝑇 (𝑗𝜔), il faudra effectuer le changement de variable : 𝑧⇒ 𝑒 𝑗𝜔 𝑇 𝐸 Filtre RIF. 𝑻 𝒋𝝎 = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒆 −𝒋𝒌𝜔 𝑇 𝐸 Filtre RII. 𝑻 𝒋𝝎 = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒆 −𝒋𝒌𝜔 𝑇 𝐸 𝟏− 𝒍=𝟎 𝑴 𝒃 𝒍 𝒆 −𝒋𝒌𝜔 𝑇 𝐸
 à la fonction de transfert isochrone 𝑇 (𝑗𝜔), il faudra effectuer le changement de variable : 𝑧⇒ 𝑒 𝑗𝜔 𝑇 𝐸. Filtre RIF. 𝑻 𝒋𝝎 = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒆 −𝒋𝒌𝜔 𝑇 𝐸. Filtre RII. 𝑻 𝒋𝝎 = 𝒌=𝟎 𝑵 𝒂 𝒌 𝒆 −𝒋𝒌𝜔 𝑇 𝐸 𝟏− 𝒍=𝟎 𝑴 𝒃 𝒍 𝒆 −𝒋𝒌𝜔 𝑇 𝐸.")
Présentations similaires













>")





