Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Le contrôle d’un moteur à induction
Guy Gauthier ing. Ph.D. Juillet 2011

2
Le contrôle des moteurs asynchrones en vitesse
La vitesse d’un moteur à induction s’écrit comme suit: Elle dépend de: Glissement S; Fréquence du réseau fp.

3
Contrôle du glissement
Pour changer la vitesse du moteur, on peut jouer sur le glissement de trois façons: Changer le nombre de pôles; Changer le voltage du stator; Contrôle du rotor en changeant la résistance du rotor; par le couplage en cascade

4
Changer le nombre de pôles
La vitesse de synchronisme d’un moteur alimenté à 60 Hz et ayant 2 pôles est de 3600 RPM. Si le moteur possède 4 pôles cette vitesse est divisée par 2 et devient 1800 RPM. (moteur de type Dahlander)
")
5
Changer le voltage au rotor
Le couple du moteur est proportionnel au carré de la tension d’alimentation au stator. Donc, changer la tension d’alimentation change la vitesse en changeant la position du point d’opération.

6
Changer la résistance au rotor
Si le moteur est à rotor bobiné, on peut insérer des résistances dans le circuit du rotor. Les pertes par effet Joule au rotor change la caractéristique couple/vitesse. R augmente

7
Contrôle de la fréquence
Pour changer la vitesse du moteur, on peut jouer sur la fréquence alimentant le moteur. Ce qui mène au variateur électronique de vitesse (drive).
.")
8
Éléments d’un variateur électronique de vitesse

9
Éléments d’un variateur électronique de vitesse

10
Éléments d’un variateur électronique de vitesse

11
Éléments d’un variateur électronique de vitesse

12
Diode et thyristors Diode: Thyristor : < 300 Hz

13
Diode et thyristors GTO : gate turn off thyristor < 1 kHz

14
Transistors Bipolaire: MOS: < 10 kHz < 40 kHz

15
Transistors IGBT: insulated gate bipolar transistor < 20 kHz

16
Le contrôleur à fréquence variable
Schéma de principe

17
Étape #1: Le redresseur La tension alternative de 60 Hz (50 Hz) doit être transformée en une tension continue. Il faut donc insérer un redresseur (ou pont de Graetz). Selon la composante semi-conductrice le redresseur donne: Tension moyenne de sortie constante si diode; Tension moyenne de sortie variable si thyristor.
. Selon la composante semi-conductrice le redresseur donne: Tension moyenne de sortie constante si diode; Tension moyenne de sortie variable si thyristor.")
18
Redresseur à diodes Pas de contrôle…
Donc la tension moyenne de sortie est constante. Tension DC moyenne = 1.35 x la tension AC

19
Redresseur à thyristors
Contrôle de l’angle d’amorcage. Permet une valeur moyenne variable en sortie. Tension DC moyenne = 1.35 * voltage AC * cos(alpha)
")
20
Redresseur à thyristors
Formes d’onde:

21
Redresseur Lors du freinage du moteur, le redresseur à thyristor permet de retourner de l’énergie vers le réseau, ce qui n’est pas possible avec un pont de Graetz basé sur des diodes.

22
Étape #2: Le circuit intermédiaire
Le but du circuit intermédiaire est de filtrer le signal en sortie du pont de Graetz. Si le pont de Graetz est basé sur des diodes, la tension en sortie du circuit ne peut être variée que si le circuit intermédiaire varie cette tension. Circuit hacheur.

23
Bobine de filtrage Si le redresseur est contrôlé (thyristors), on utilise une bobine qui filtre les composantes de haute fréquence. Cette technique permet de retourner de l’énergie à la source de CA lors des freinages.

24
Filtre L-C Une autre technique utilise un filtre L-C.
Elle fonctionne avec les deux types de redresseurs.

25
Hacheur (chopper) Cela peut aussi être un circuit appelé “hacheur” qui découpe le signal à CC. L’onde résultante est filtrée pour obtenir un signal à CC d’amplitude variable.

26
Commande du hacheur L’amplitude moyenne du signal de sortie est:

27
Après deux étages Avec un pont de diodes au premier étage et un filtre L-C, le troisième étage reçoit une tension constante. Avec un pont de diodes au premier étage et un hacheur, le troisième étage reçoit une tension variable. Avec un pont de thyristors au premier étage et une bobine, le troisième étage reçoit un courant variable.

28
Étape #3: L’onduleur Si l’onduleur recoit un courant variable, on peut générer un signal à CA. Cet onduleur est dit à source de courant (CSI).
.")
29
Onduleur CSI L’onduleur CSI comprend 6 thyristors, 6 diodes et 6 condensateurs. Quand un thyristor est activé il ne peut s’arrêter que si la tension s’inverse, ce qui est le rôle des condensateurs dans ce circuit. Ces composantes doivent être adaptées à la grosseur du moteur à alimenter.

30
Onduleur CSI

31
Étape #3: L’onduleur L’autre variante d’onduleur permet de générer un courant de sortie CA. Exige l’utilisation de transistors.

32
Onduleur à transistors
Les thyristors ne peut être arrêtés que lorsqu’il y a inversion de tension. Un transistor offre plus de contrôle puisqu’il peut être arrêté à n’importe quel moment.

33
Onduleur à transistors
Mais tous les transistors ne sont pas égaux dans leurs caractéristiques. En particulier les puissances et fréquences de commutation. Fréquences plus élevées qu’avec les thyristors.

34
Les deux types de modulation
Pulse amplitude modulation (PAM) Pulse width modulation (PWM).
 Pulse width modulation (PWM).")
35
La modulation d’amplitude
Principe: L’ajustement de la tension dans le bobinage dépend des transistors ouverts et fermés… 1

36
La modulation d’amplitude
Dans ce circuit: U = 0 ou Um selon l’état de T1 et T2; V = 0 ou Um selon l’état de T3 et T4. Ainsi, U-V = -Um, 0 ou +Um. 1

37
PAM Ainsi, par une commutation adéquate, on peut obtenir une onde sinusoidale.

38
La modulation d’amplitude
La tension RMS de sortie est égale à 86.6 % de la tension moyenne du signal continu. Le type de modulation (à 6 ou 18 impulsions) à un effet sur la qualité du signal de sortie.
 à un effet sur la qualité du signal de sortie.")
39
La modulation de largeur d’impulsion (PWM)
On peut aussi obtenir une onde sinusoïdale en utilisant la modulation de largueur d’impulsion (PWM).
.")
40
La modulation de largeur d’impulsion (PWM)
Anciennement: méthode analogique. m est un multiple de 3 pour limiter les harmoniques

41
La modulation de largeur d’impulsion (PWM)
Maintenant implanté dans des contrôleurs et des DSP. Ainsi, on peut obtenir des approches de contrôle plus performantes.

42
Le PWM L’onduleur varie à la fois l’amplitude et la fréquence.

43
Le PWM L’amplitude RMS maximale de la sortie est de 86.6 % la tension d’entrée de l’onduleur.

44
Le PWM et la fréquence La fréquence fv à un impact sur la qualité du signal. Mais, un compromis doit être fait. fv faible augmente les pertes dans le moteur; fv grand augmente les pertes dans l’onduleur.

45
Le problème des harmoniques
Exemple des harmoniques présentes pour une modulation d’amplitude à 6 impulsions.

46
Le problème des harmoniques
Les nuisances ont lieu à base vitesse car à haute vitesse, les harmoniques sont filtrées par les réactances du moteur.

47
Le problème des harmoniques
Visualisation des champs tournants:

48
Conséquences des harmoniques
Augmentation des pertes Foucault; Echauffement du moteur; Rendement et efficacité réduite; Vibrations; Pulsations de couple; Augmentation du bruit.

49
Commande scalaire Le couple maximal d’un moteur asynchrone se produit quand le glissement S est: Et est égal à:

50
Commande scalaire En changeant à la fois la fréquence et la tension pour maintenir le rapport vf/ωp, le flux dans le moteur est maintenu constant et la caractéristique du moteur se déplace.

51
Commande scalaire Au delà d’une certaine vitesse, la tension vf atteint son maximum et le couple maximum chute.

52
Commande scalaire

53
Commande scalaire Cette commande scalaire est dite « contrôle V/f ».
Simple à implanter car basé sur le régime permanent. Dynamique lente. Contrôle des amplitudes de vitesse ou de couple.

54
Commande scalaire V/F Commande en vitesse avec la tension.

55
Commande scalaire V/F Commande en vitesse avec le courant.

56
Commande vectorielle Comme montré dans une des acétates précédentes, le contrôle vectoriel donne un champ tournant parfaitement circulaire. Dans le cas d’un moteur à CC, on peut faire le contrôle de ce moteur utilisant les bobinages du rotor et du stator de façon indépendante.

57
Moteur CC à excitations indépendantes
Équations en jeu: Il existe un couple (ia, if) correspondant à un couple (ωm, Tm). Indépendance du couple et la vitesse. Certains diraient découplage !
 correspondant à un couple (ωm, Tm). Indépendance du couple et la vitesse. Certains diraient découplage !")
58
Commande vectorielle Donc, idéalement il faudrait pouvoir faire de même en CA. Mais, pour un moteur à CA à 3 phases, il y a une représentation triphasée des flux, courants et tensions.

59
Commande vectorielle Transformation à faire:

60
Commande vectorielle Les moteurs CC sont très optimaux au niveau du couple car le flux et le courant sont orthogonaux.

61
Orientation du champ Orientation non optimale: Orientation optimale:

62
Mesure de la position et de l’orientation du flux
Mesure du flux:

63
Mesure de la position et de l’orientation du flux
Calculateur de couple:

64
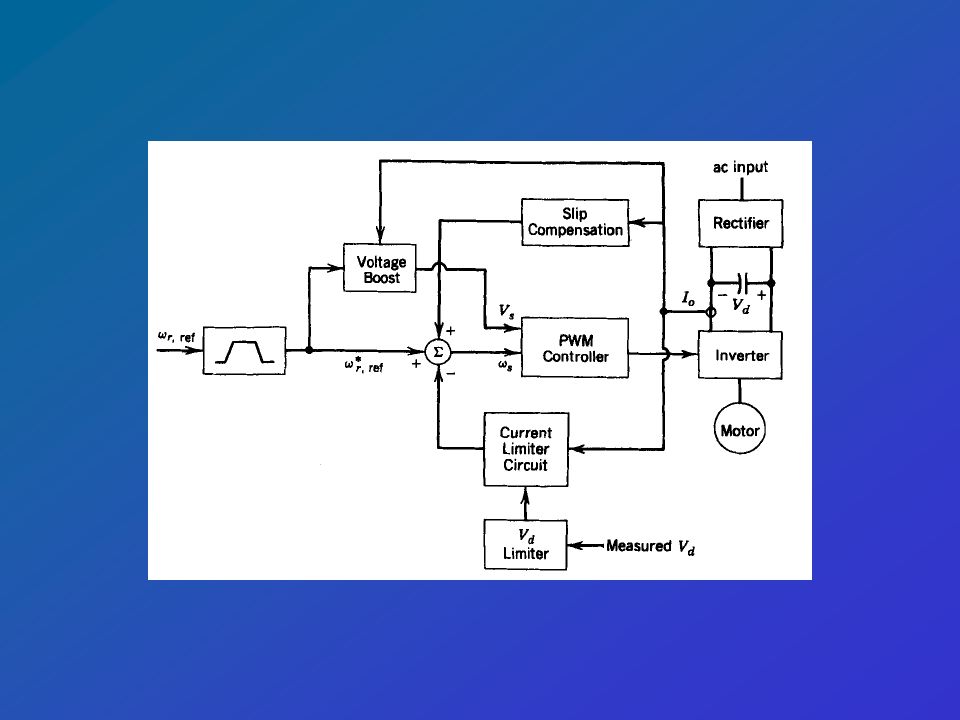
Contrôle direct de l’orientation du flux
Schéma de principe:

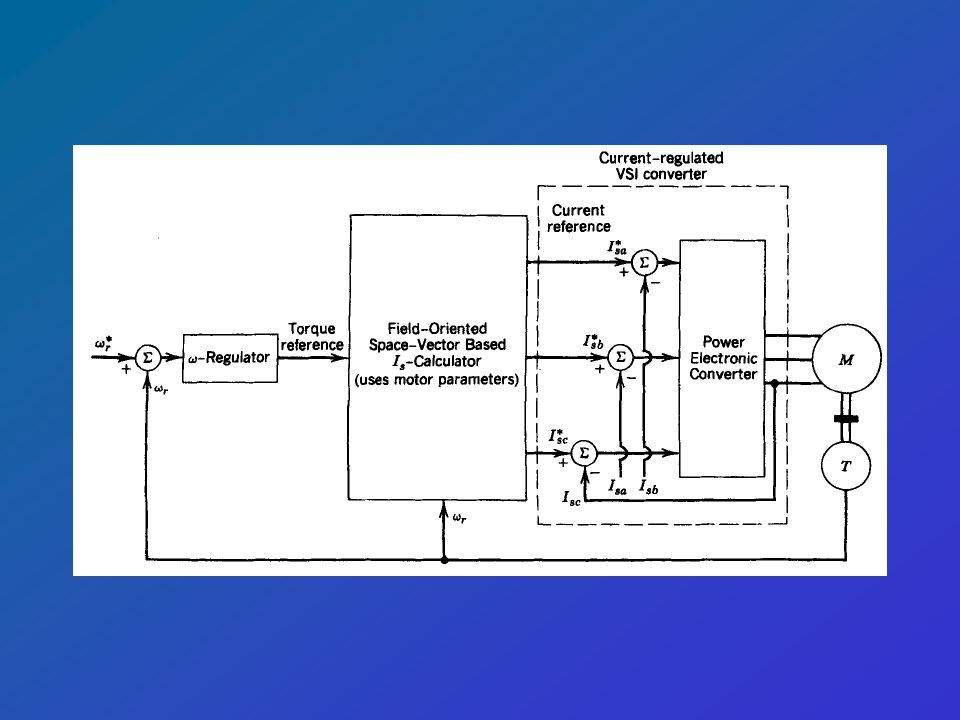
65
Contrôle vectoriel par mesure de l’orientation du flux
Schéma de principe:

66
Contrôle vectoriel d’un moteur
Mesure indirecte de l’orientation du flux:

69
Choix du contrôleur La caractéristique vitesse-couple de la combinaison contrôleur-moteur devient rectangulaire:

70
Choix du contrôleur Le contrôleur peut fournir:
un couple égal à 160% du couple nominal; une vitesse égale à 200% de la vitesse nominale. 1/n

71
Choix du contrôleur La caractéristique de la charge à un impact sur le choix du contrôleur: Exemple: ventilateur (domaine d’utilisation 30 à 80% de la charge maximale).
.")
72
Choix du contrôleur Il faut s’assurer que le couple moteur soit toujours plus grand au couple résistant:

73
Choix du contrôleur La caractéristique de la charge à un impact sur le choix du contrôleur: Exemple 2: charge à couple constant

74
Choix du contrôleur Si le contrôleur et le moteur permettent un couple 60% plus grand que le couple nominal, cela est suffisant pour accélérer la charge.

75
Choix du contrôleur Si le contrôleur et le moteur ne permettent pas un couple plus grand que le couple nominal, il faut prévoir le couple d’accélération.

76
Choix du contrôleur La façon la plus simple de choisir le contrôleur est de mesurer le courant maximum du moteur à pleine charge. Si le moteur n’est pas à pleine charge, le courant peut être déduit en comparant avec des applications similaires.

77
Choix du contrôleur Choix basé sur la puissance de sortie du moteur et la charge et la puissance de sortie du contrôleur. Implique de connaître le rendement et le facteur de puissance (moins précis).
.")
78
Choix du contrôleur Choix basé sur la puissance nominale du moteur.
Surdimensionnement du contrôleur si le moteur ne travaille jamais à pleine charge.

Présentations similaires