Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
AQUISITION DE DONNÉES NUMÉRIQUES DE TÉLÉDÉTECTION
BASES TECHNOLOGIQUES AQUISITION DE DONNÉES NUMÉRIQUES DE TÉLÉDÉTECTION

2
Acquisition DE DONNÉES DE TÉLÉDÉTECTION
Le principe de base Échantillonnage spatiale Échantillonnage électronique Les capteurs numériques Partie optique Partie éclectrique Acquisition DE DONNÉES DE TÉLÉDÉTECTION

3
Création DES DONNÉES numériques: PRINCIPE GÉNÉRAL
Conversion du RÉM en signal électrique Échantillonnage spatial du RÉM Échantillonnage électronique du signal et conversion en comptes numériques Création DES DONNÉES numériques: PRINCIPE GÉNÉRAL

4
Échantillonnage spatial 1-d: Les Profilomètres
Domaine optique Sondeurs atmosphériques (passifs ou actifs) Domaine électrique Radiomètres hyperfréquences Altimètres radar Diffusiomètres Échantillonnage spatial 1-d: Les Profilomètres
 Domaine électrique. Radiomètres hyperfréquences. Altimètres radar. Diffusiomètres. Échantillonnage spatial 1-d: Les Profilomètres.")
5
Échantillonnage spatial 2-D PARTIEL
Domaine optique - Altimètres laser Domaine électrique - Diffusiomètres Échantillonnage spatial 2-D PARTIEL

6
Échantillonnage spatial 2-D Exhaustif: capteurs imageurs
Instantané [caméra photographiques] caméra numériques à matrice des CCD (Charge Coupled Device) Balayage espace objet [caméra photographiques panoramiques] [balayeurs optico-mécaniques] Balayage espace image mécaniques [caméra zonales] balayeurs à peigne ou à râteau Balayage espace image électronique Échantillonnage spatial 2-D Exhaustif: capteurs imageurs
 Balayage espace objet [caméra photographiques panoramiques] [balayeurs optico-mécaniques] Balayage espace image mécaniques [caméra zonales] balayeurs à peigne ou à râteau. Balayage espace image électronique. Échantillonnage spatial 2-D Exhaustif: capteurs imageurs.")
7
Capteurs optiques: caméras à instantanés
L’ensemble d’échantillons spatiaux couvrant la scène d’intérêt est prélevé Actuellement la plupart à bord d’avions À partir des altitudes orbitales exemple: caméra à bord de la station spatiale Types d’images générées: panchromatiques; multispectrales (3 VIS standard + 1 PIR certaines) Capteurs optiques: caméras à instantanés
 Capteurs optiques: caméras à instantanés.")
8
Capteurs optiques: balayeurs ESPACE-OBJET (optico-mécaniques)
De plus en plus abandonnés en faveur des balayeurs espace-image Capteurs optiques: balayeurs ESPACE-OBJET (optico-mécaniques)
")
9
Balayeurs à râteau (exemple: HRVIR SPOT-4)
")
10
Capteurs optiques: L’UNITÉ D’ÉCHANTILLONNAGE
Capteur ETM+ de Landsat-7 (balayeur à fouet) Calculs Distance focale = 2,44 m Largeur et hauteur du détecteur (bandes spectrales du visible) = 103 m Altitude de vol = 705 km CVI (103 m /2,44 m) x 10-6 m/m = 42,5 x 10-6 rad (nadir, θ=0o) CVISL=CVISH = (42,5x10-6 rad) x 705 km x 103 m/km = 30 m Capteur IKONOS (balayeur à râteau) Calculs Distance focale = 10 m Taille d’un détecteur (Bande panchromatique) = 12 m Altitude de vol = 681 km Nombre de détecteurs: CVI (12 m /10 m) x 10-6 m/m = 1,2 x 10-6 rad CVIS (axe vertical) (1,2 x10-6 rad) x m = 0,82 m Fauchée x 0,82 m= 12 km CVI (rad) = d/f CVIS (m) = CVI x H Capteurs optiques: L’UNITÉ D’ÉCHANTILLONNAGE
 Calculs. Distance focale = 2,44 m. Largeur et hauteur du détecteur (bandes spectrales du visible) = 103 m. Altitude de vol = 705 km. CVI. (103 m /2,44 m) x 10-6 m/m = 42,5 x 10-6 rad. (nadir, θ=0o) CVISL=CVISH = (42,5x10-6 rad) x 705 km x 103 m/km = 30 m. Capteur IKONOS (balayeur à râteau) Calculs. Distance focale = 10 m. Taille d’un détecteur (Bande panchromatique) = 12 m. Altitude de vol = 681 km. Nombre de détecteurs: CVI. (12 m /10 m) x 10-6 m/m = 1,2 x 10-6 rad. CVIS (axe vertical) (1,2 x10-6 rad) x m = 0,82 m. Fauchée x 0,82 m= 12 km. CVI (rad) = d/f. CVIS (m) = CVI x H. Capteurs optiques: L’UNITÉ D’ÉCHANTILLONNAGE.")
11
RÉSOLUTION SPATIALE 25 cm 10 cm 100 cm 50 cm

13
Échantillonnage électronique

15
Résolution radiométrique
2 niveaux de gris 4 niveaux de gris 256 niveaux de gris

16
Une image numérique Les valeurs numériques sont des entiers (par convention=codage) toujours positifs L’unité de base = le bit / Deux états possibles 0 ou 1 Un octet ou 8 bits (byte) 2 octets ou 16 bits
 2 octets ou 16 bits.")
17
Une image numérique Le code binaire: un nombre entier positif est formé en assignant à chaque bit d’un groupe (1 octet, 2 octets, …) une puissance de 2 27 26 25 24 23 22 21 20 256 (28) valeurs possibles : 0-255 = 93 En 16 bits donc 216 (65536) valeurs possibles :
 une puissance de (28) valeurs possibles : = 93. En 16 bits donc 216 (65536) valeurs possibles :")
18
Une image numérique Le code binaire: au cours de divers traitement l’échelle originale peut être transformée à une échelle avec des entiers positifs et négatifs ou des réels. Exemple d’un système « valeur absolue et signe », le nombre entier est formée en assignant à chaque bit d’un groupe moins 1 bit (1 octet, 2 octets, …) une puissance de 2, le dernier bit 0=positif 1=négatif 26 25 24 23 22 21 20 8 bits : valeurs possibles : -127 à + 127 16 bits avec signe valeurs possibles : à
 une puissance de 2, le dernier bit 0=positif 1=négatif bits : valeurs possibles : -127 à bits avec signe valeurs possibles : à")
19
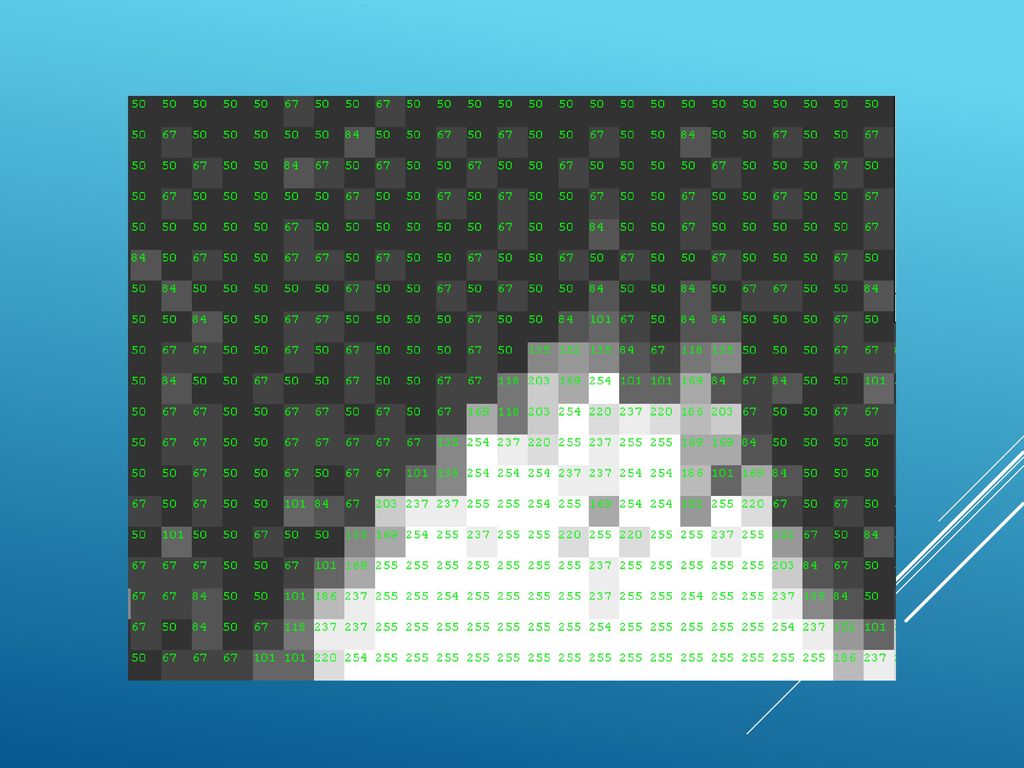
Le résultat de ce double échantillonnage = image numérique

20
Une image numérique de télédétection n’est qu’un tableau de nombre entiers qui représentent la quantité du rayonnement électromagnétique réfléchi ou émis des objets. Nous pouvons la visualiser comme une image standard et l’analyser par ordinateur

22
Une image multi-composantes contiennent plus d’une matrice, chacune représentant une propriété différente du rayonnement électromagnétique. Nous pouvons en choisir 3 et les visualiser en simultané comme une image couleur ou analyser l’ensemble par ordinateur

23
Capteurs imageurs dans les micro-ondes
Radiomètres hyperfréquences Radars imageurs Capteurs imageurs dans les micro-ondes

24
Les radars à ouverture DE SYNTHÈSE

26
Résolution azimutale de l'antenne réelle
400 km 2 km 8 m Résolution azimutale de l'antenne réelle Résolution azimutale de l'antenne synthétisée

28
La résolution spatiale en portée

29
Les PLATE-FORMES POUR L’ACQUISITION DE DONNÉES DE Télédétection

30
Images aériennes 300m (1km) à 15 km
Images satellitales

31
les avions

32
Les satellites automatiques

33
Caractéristiques orbitales
satellites géostationnaires satellites à orbite basse - à orbite circulaire quasi-polaire (héliosynchrones) - à orbite quelconque
 - à orbite quelconque.")
34
Orbite équatoriale géostationnaire ou géosynchrone (de geo = Terre + stationnaire= qui reste immobile ou synchrone = qui a lieu en même temps). Le plan orbital coïncide avec le plan équatorial de la Terre. L’altitude du satellite est à km environ de la Terre. À cette distance, le satellite complète une révolution autour de la Terre à 24 heures. Puisque la Terre compète aussi une révolution autour de son axe à 24 heures, le satellite et la Terre meuvent ensemble (d’où le nom géosynchrone). Ainsi, un tel satellite reste toujours directement au-dessus du même territoire (d’où le nom géostationnaire).
. Ainsi, un tel satellite reste toujours directement au-dessus du même territoire (d’où le nom géostationnaire).")
35
Exemple de la couverture obtenue par un capteur optique à bord d’un satellite géostationnaire : GOES-8

36
Satellites à orbite basse
Lorsque le satellite orbite autour de la Terre à une altitude de plusieurs centaines de km ( km environ) nous l’appelons satellite à orbite basse. À cause de sa proximité de la Terre le satellite doit se déplacer le long de son orbite à une très grande vitesse: km/h ou environ 7 km/sec!! Ils font le tour de la Terre à environ 90 minutes. Ces satellites sont d’intérêt pour nous car leur proximité de la Terre permet l’acquisition des images détaillées de la surface terrestre.
 nous l’appelons satellite à orbite basse. À cause de sa proximité de la Terre le satellite doit se déplacer le long de son orbite à une très grande vitesse: km/h ou environ 7 km/sec!! Ils font le tour de la Terre à environ 90 minutes. Ces satellites sont d’intérêt pour nous car leur proximité de la Terre permet l’acquisition des images détaillées de la surface terrestre.")
37
Le plan orbital d’un satellite à orbite basse ne peut pas être équatorial. Il y a toujours un angle entre ces deux plans que l’on appelle l’inclinaison de l’orbite Selon cette inclinaison un capteur à bord d’un satellite, en profitant du mouvement de la Terre, peut couvrir des territoires jusqu’à une certaine latitude de part et d’autre de l’équateur (amplitude zonale)
")
38
Segments d’une orbite: Ascendant/Descendant

40
am pm am pm am pm

42
Orbites quasi-polaires
Une orbite de grand intérêt est l’orbite quasi-polaire circulaire. Le satellite se déplace presque dans la direction nord-sud. Une telle orbite permet: De couvrir l’ensemble de la surface terrestre dans un intervalle de temps donné (à l’exception des pôles). Cet intervalle peut aller de de quelques jours à presque 1 mois. De passer au-dessus du même territoire à la même heure locale De conserver un angle constant entre le plan orbital et la direction Terre-Soleil tout le long d’une année: satellite héliosynchrone
. Cet intervalle peut aller de de quelques jours à presque 1 mois. De passer au-dessus du même territoire à la même heure locale. De conserver un angle constant entre le plan orbital et la direction Terre-Soleil tout le long d’une année: satellite héliosynchrone.")
43
Orbite héliosynchrone

44
Cependant … selon la saison l’angle du soleil peut varier

45
Orbite héliosynchrone crépusculaire
Autumn Equinox October November Winter Solsctice January February Spring Equinox April Sun March Summer Solstice July August

47
Exemples des satellites avec des radars à bord
Comparaison des caractéristiques orbitales RADARSAT ERS-1 JERS-1 Type d’orbite Hélio. (crépusculaire) Altitude 798 km 785 km 568 km Inclinaison 98.60 98.50 97.70 Période 6042 s 6028 s 5800 s Noeud descendant 6h 00’ 10h 15’ 10h30’ Vitesse 6.576 km/s 6.628 km/s 6.883 km/s Cycle d’observation 24 days 35 days 44 days
 Altitude. 798 km. 785 km. 568 km. Inclinaison Période s s s. Noeud descendant. 6h 00’ 10h 15’ 10h30’ Vitesse km/s km/s km/s. Cycle d’observation. 24 days. 35 days. 44 days.")
48
La trace au sol du satellite
L’orientation de la trace au sol est une fonction de l’inclinaison du plan orbital du satellite L’orientation de la trace au sol est fonction de l’altitude du satellite

49
Fauchée du capteur

50
L’espacement entre deux traces successives
(même segment orbital) dépend de la fauchée du capteur et de l’orientation de la trace au sol
 dépend de la fauchée. du capteur et de l’orientation de la trace au sol.")
52
Cycle d’observation variable

53
Télémétrie

Présentations similaires


















 III.Les techniques de transmissions -Multiplexage temporelle (TDM)>")








 Les réglages (p4)>")