Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Caractéristiques mécaniques des matériaux rocheux

2
Les théories de la mécanique des matériaux sont la base de la théorie des structures, elles permettent de déterminer les contraintes internes d’un corps soumis à des efforts externes, ainsi que les déformations qui en résultent. De telles déformations peuvent être réversibles ou permanentes, la limite des sollicitations réversibles est appelée surface de charge plastique ou surface de plasticité. Cette surface s’écrit généralement en fonction de l’état de contrainte sij et des variables internes (k1, k2,….etc.) Plusieurs critères de rupture se sont développées, pour décrire cette surface de plasticité, ils peuvent être insérés dans des codes de calcul pour donner des réponses à des problèmes de comportement des matériaux.
 Plusieurs critères de rupture se sont développées, pour décrire cette surface de plasticité, ils peuvent être insérés dans des codes de calcul pour donner des réponses à des problèmes de comportement des matériaux.")
3
Notion de contrainte dans un solide
L’étude des forces à l’intérieur d’un solide nécessite la définition de l’intensité de ces forces à chaque point, or l’évaluation des forces individuelles entre les atomes en mouvement thermique qui constitue un corps solide est un problème complexe, il n’est pas résolu à nos jours. La mécanique des matériaux se propose l’étude des forces dans un volume comme étant formé d’une matière continue, homogène, et isotrope

4
Contraintes dans un solide
Si DA tend vers zéro on aura :

5
t est appelé vecteur contrainte conjuguée à la facette dA au point O
t est appelé vecteur contrainte conjuguée à la facette dA au point O. Ce vecteur contrainte est généralement oblique par rapport à l’élément dA ; il a donc une composante s normale à la facette et une autre composante tangentielle t. Les contraintes s et t sont des forces par unité de surface ; elles ont donc la dimension FL-2. Elles varient en général d’un point à l’autre du corps solide et, en un point déterminé, elles dépendent de la facette à laquelle elles sont conjuguées. Elles caractérisent par leur ensemble l’état de contrainte du corps.

6
Etat Plan de contraintes
L’état plan de contraintes est un état simple, mais fréquent en pratique, où les contraintes t restent dans un même plan, quelque soit la facette considérée. Choisissons dans le plan de contraintes deux axes orthogonaux x et y. Appelons x et xy les contraintes normale et tangentielle sur la facette perpendiculaire à l’axe x, y et yx les contraintes normale et tangentielle sur la facette perpendiculaire à l’axe y et enfin et les contraintes normale et tangentielle sur une facette courante définie par l’angle que fait sa normale avec l’axe des x, angle compté positivement dans le sens des aiguilles d’une montre. Il revient au même de mesurer depuis la facette Oy (x=0) vers la facette courante.
 vers la facette courante.")
7
Etat Plan de contraintes

8
Pour obtenir l’élément de volume dont nous étudierons l’équilibre, déplaçons infiniment peu la facette courante parallèlement à elle même, de manière qu’elle forme avec les facettes normales à Ox et Oy un prisme élémentaire à base triangulaire OBC. Nous considérons un tronçon de ce prisme de longueur unitaire dans la direction Oz Nous conviendrons de mesurer une contrainte tangentielle positivement quand, par rapport à un point intérieur P, elle tend à faire tourner la facette sur laquelle elle agit dans le sens des aiguilles d’une montre. Quant aux contraintes normales, elles seront comptées positivement en traction.

9
Essayons d’exprimer et en fonction de x, y, xy et yx
Essayons d’exprimer et en fonction de x, y, xy et yx. Ecrivons que le prisme est en équilibre de translation suivant les directions de et de . On obtient (en négligeant les forces de volume) : Après simplification, nous aurons :
 : Après simplification, nous aurons :")
10
Facettes pour lesquelles la contrainte normale devient maximum ou minimum.
Ce qui donne un certain angle 0 et l’angle 0 + /2. Il existe donc dans le faisceau deux facettes normales entre elles (facettes principales), pour lesquelles la contrainte prend une valeur maximum 1 ou une valeur minimum 2 (contraintes principales). On remarque que l’expression de d/d qu’on a égalé à 0 est le double de l’expression de , donc on a aussi = 0.
, pour lesquelles la contrainte prend une valeur maximum 1 ou une valeur minimum 2 (contraintes principales). On remarque que l’expression de d/d qu’on a égalé à 0 est le double de l’expression de , donc on a aussi = 0.")
11
On peut calculer 1 et 2 en fonction de x , y et xy en écrivant la première équation sous la forme : Et en exprimant sin2 et cos2 en fonction de tan2. On obtient ainsi :

12
Découpons au voisinage du point O un parallélépipède élémentaire d’épaisseur unitaire et exprimons qu’il est en équilibre de rotation dans le plan des contraintes. Si on désigne par Fx et Fy les composantes selon x et y d’une éventuelle force par unité de volume.

13
Si on tient compte du fait que :

14
et si on néglige les infiniments petits du troisième ordre vis à vis de ceux du deuxième, il ne reste que :

15
Si l’on écrit à présent l’équilibre de translation du parallélépipède, on obtient les deux équations suivantes :

16
Après simplification, on obtient :
Ces équations, qui doivent être satisfaites en tout point intérieur du solide étudié sont appelées “ équations indéfinies d’équilibre ”.

17
Cercle de Mohr : Précédemment, nous avons admis que les contraintes x , y et xy étaient connues sur deux facettes orthogonales x = 0 et y = 0 que nous avons prises comme facettes de référence, et nous avons recherché les facettes et contraintes principales considérées comme inconnues. Or, il est fréquent en pratique de se trouver face au problème inverse : on connaît les contraintes et facettes principales et on recherche les contraintes sur une facette quelconque. Dans ce cas, il convient de prendre les facettes principales comme facettes de référence, 1 et 2 jouent le rôle de x et y ; 1 2 = 0.

18
Les contraintes tangentielles atteignent leur maximum sur les deux facettes inclinées à /4 sur les facettes principales, et l’on a en supposant 1 2 : Ces deux facettes sont appelées facettes de glissement.

19
En utilisant les relations :
On peut écrire :

20
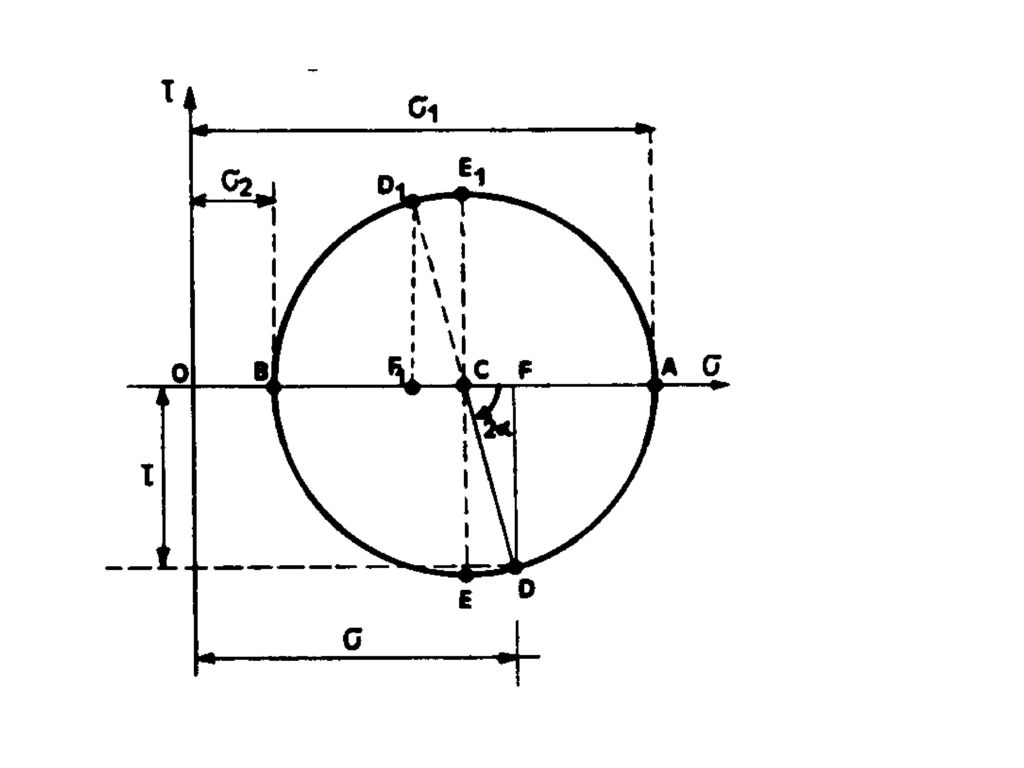
Ce sont les équations paramétriques d’une courbe plane, dont on obtient l’équation en éliminant . On pose : On additionne les égalités après les avoir élevées au carré ; on aura : Dans un système d’axes orthogonaux (,), cette équation représente un cercle de rayon r et dont le centre est sur l’axe des à la distance a de l’origine O.
, cette équation représente un cercle de rayon r et dont le centre est sur l’axe des à la distance a de l’origine O.")
22
Le point A ( = 1 ; = 0) est le point représentatif de la facette principale n°1 qui est la facette de référence. Le point B ( = 2 ; = 0) est le point représentatif de la facette principale n°2 - Le point D ( ; ) est le point représentatif d’une facette quelconque. En effet,
 est le point représentatif de la facette principale n°2. - Le point D ( ; ) est le point représentatif d’une facette quelconque. En effet,")
24
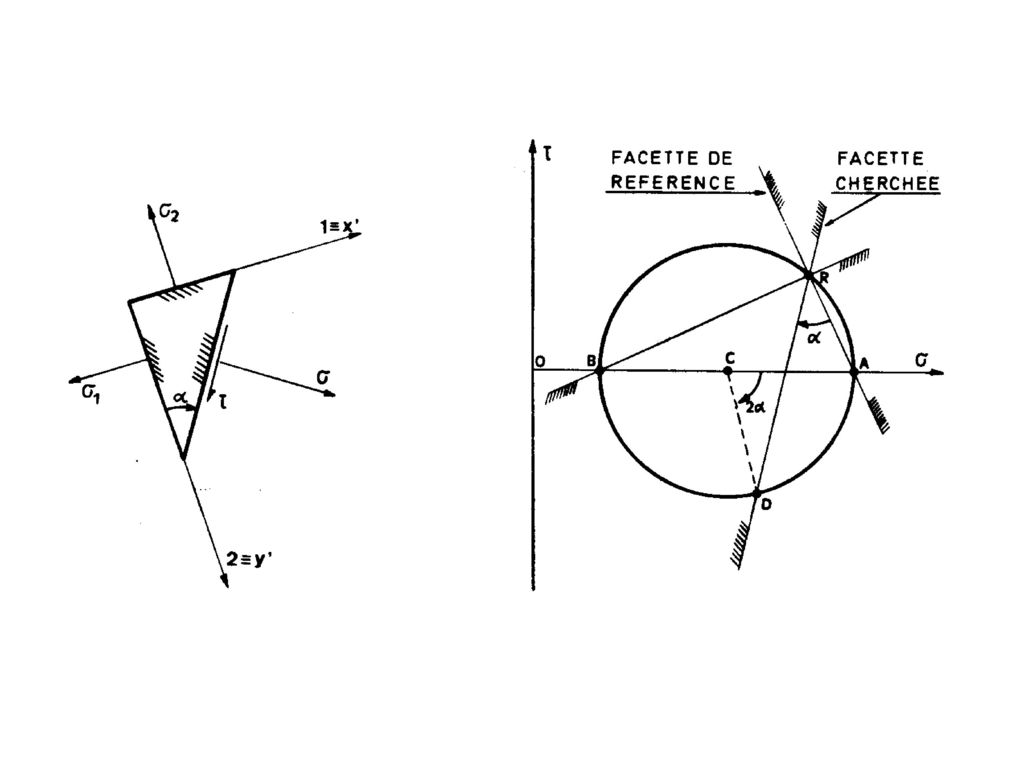
Soient l’état de contrainte en un point d’une pièce et le cercle de Mohr correspondant. Traçons par le point A, représentant de l’état de contrainte sur la facette où agit 1, une parallèle à la facette en question. Traçons par le point B, représentant de l’état de contrainte sur la facette où agit 2, une parallèle à cette la facette. Ces droites se coupent en R sur la circonférence. On voit que la facette sur laquelle agissent ( ; ) est parallèle à RD. En effet, ; donc . Le point R est le centre de rayonnement de toutes les facettes du faisceau.

25
Le cercle de Mohr peut aussi servir à déterminer les contraintes et les facettes principales lorsqu’on connaît x , y et xy sur deux facettes orthogonales.

26
Etat Tridimensionnel de contraintes
On peut généraliser les résultats du paragraphe précédent, en cas tridimensionnel de contraintes, le vecteur contrainte sur une facette est représenté par trois composantes: Une normale s Deux tangentielles Prenons par exemple la facette appartenant au plan (Z, X), le tenseur ty sera décomposé en sy, tyx, tyz.
, le tenseur ty sera décomposé en sy, tyx, tyz.")
27
On aura donc neuf contraintes sx, sy, sz, txy, txz, tyx, tyz, tzx, tzy, agissant sur trois faces perpendiculaires entre elles au point O. Chacune de ces contraintes est fonction des coordonnées du point O. Par conséquent, sur les faces opposées du parallélépipède, obtenues à partir des premières en donnant un accroissement dx à x, dy à y et dz à z, les valeurs des contraintes subissent des accroissements élémentaires. Par exemple, la contrainte x agissant sur la face arrière devient sur la face avant :

28
Le tenseur contrainte s'écrit:
Principe de réciprocité: txy = tyx txz = tzx tyz = tzy le tenseur contrainte s est donc symétrique par rapport à sa diagonale principale.

29
Les équations indéfinies d'équilibre s’écriront :
Les trois équations indéfinies d'équilibre doivent être satisfaites en tout point du corps.

30
Invariants du tenseur de contraintes :
Ce sont des quantités qui restent inchangées lors de toute transformation d’axes, nous donnerons ici les expressions de ces trois invariants :

31
Déviateurs de contraintes :
Pour les applications à la plasticité et à la viscoplasticité, il est utile de décomposer le tenseur de contraintes en un tenseur sphérique de trois contraintes principales égales et valent : et le déviateur de contraintes :

32
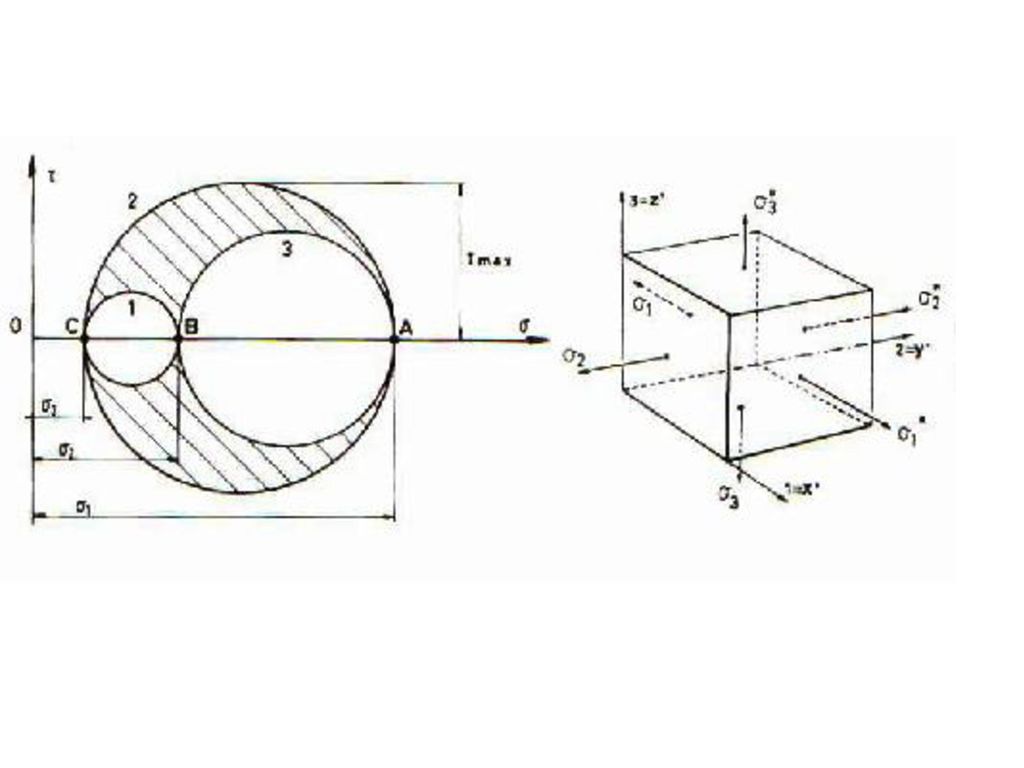
Tricercle de Mohr Comme pour le cas plan de contraintes, il existe trois facettes (facettes principales), pour lesquelles les contraintes tangentielles sont nulles, elles ne sont donc soumises qu'aux contraintes principales (s1, s2, s3), avec s1 représente le maximum que peut avoir la contrainte s, s3 représente le minimum, et s2 représente une valeur intermédiaire.
, pour lesquelles les contraintes tangentielles sont nulles, elles ne sont donc soumises qu aux contraintes principales (s1, s2, s3), avec s1 représente le maximum que peut avoir la contrainte s, s3 représente le minimum, et s2 représente une valeur intermédiaire.")
33
Représentation graphique
Considérons les directions principales comme axes des coordonnées s1, s2 et s3, les facettes passant par l’axe s3, sont sous l’influence uniquement des contraintes s1 et s2, la variation des contraintes sur ces facettes est identique à l’état plan de contrainte en s1 et s2, elles seront représentées dans le plan (s, t) par le cercle de diamètre AB, de la même manière les contraintes sur les facettes passant par s1, seront représentées par le cercle de diamètre BC, et celles passant par s2 par le cercle de diamètre AC. Les cordonnées d’un point de l’aire hachurée, représentent les contraintes s, t des facettes inclinées aux trois axes 1, 2 et 3
 par le cercle de diamètre AB, de la même manière les contraintes sur les facettes passant par s1, seront représentées par le cercle de diamètre BC, et celles passant par s2 par le cercle de diamètre AC. Les cordonnées d’un point de l’aire hachurée, représentent les contraintes s, t des facettes inclinées aux trois axes 1, 2 et 3.")
Présentations similaires











 = x² avec Cabri Géomètre II Plus>")







>")