Télécharger la présentation
1
TPE G.P.S Présenté par : Global Positioning System Alexis PINET
Thomas BAUD Vanessa BONI

2
Introduction : - Comment s’orienter ? Du petit poucet au GPS ...
- Le NAVSTAR (NAVigation System with Time And Ranging), nom officiel du GPS - Objectifs - Principes
, nom officiel du GPS. - Objectifs. - Principes.")
3
Le GPS dans les transports aériens
Applications : Le GPS dans les transports aériens Le GPS dans les transports maritimes Le GPS dans les transports routiers Les applications militaires du GPS

4
Un certain nombre de facteurs limitent encore, et ce de façon systématique, la précision du GPS...
Mais alors, comment nos récepteurs permettent-ils de fournir des coordonnées comprenant une erreur de seulement quelques mètres... Problématique : En effet, nous pouvons alors nous interroger sur la véracité des coordonnées indiquées par le récepteur et sur la manière dont celles-ci sont perturbées ? Ainsi, quels sont les moyens existants qui permettent d ’inhiber ces erreurs ?

5
PLAN I. Explication générale du principe de triangulation
INTRODUCTION : qu ’est-ce réellement que le G.P.S ? Quelle est son utilité ? Problématique de la précision du positionnement I. Explication générale du principe de triangulation II. Imprécisions introduites par les paramètres suivants : 1. Déplacement de l’observateur (rotation de la Terre) pendant le trajet de l’onde 2. Physique : Freinage des ondes électromagnétiques 3. Technique: Non synchronisation des horloges des satellites et celles de l ’ observateur 4. Calcul. Lors de la conversion des coordonnées X,Y,Z (ECEF) en coordonnées terrestres (ENU) 5. Répartition des satellites est non homogène III. Comment remédier à cette imprécision ? 1. Utilisation mathématique 2. Utilisation 4 satellites création d’une horloge atomique pour le récepteur 3. Utilisation de données météorologiques et physiques 4. Utilisation du G.P.S différentiel CONCLUSION : Quel futur pour le G.P.S? Sera t-il concurrencé ?
 pendant le trajet de l’onde. 2. Physique : Freinage des ondes électromagnétiques. 3. Technique: Non synchronisation des horloges des satellites et celles de l ’ observateur. 4. Calcul. Lors de la conversion des coordonnées X,Y,Z (ECEF) en coordonnées terrestres (ENU) 5. Répartition des satellites est non homogène. III. Comment remédier à cette imprécision 1. Utilisation mathématique. 2. Utilisation 4 satellites création d’une horloge atomique pour le récepteur. 3. Utilisation de données météorologiques et physiques. 4. Utilisation du G.P.S différentiel. CONCLUSION : Quel futur pour le G.P.S Sera t-il concurrencé")
6
Le G.P.S utilise le principe dit de la triangulation :
A) utilisation de trois satellites : Avec un satellite : Rayon de balayage du satellite
 utilisation de trois satellites : Avec un satellite : Rayon de balayage. du satellite.")
7
Regardons donc l’évolution des renseignements suite à l’ajout d’un second satellite :

8
Modélisons donc la présence d’un troisième satellite !

9
B) Mesure de la distance
Nous connaissons maintenant notre position, après avoir mesuré la distance qui nous sépare de trois satellites. Mais comment peut-on mesurer cette distance ? Il suffit de calculer le temps que l'on met pour recevoir le signal. En effet, distance (m) = vitesse (m.s-1) x durée (s). Or, on connaît la vitesse de transmission du signal - c'est celle de la lumière dans le vide, soit 3.108m.s-1.
 = vitesse (m.s-1) x durée (s). Or, on connaît la vitesse de transmission du signal - c est celle de la lumière dans le vide, soit 3.108m.s-1.")
10
II. Imprécisions introduites par les paramètres suivants :
1. Déplacement de l’observateur (rotation de la Terre) pendant le trajet de l’onde Durant l’émission du signal, aussi court soit-il, la terre va évoluer à une certaine vitesse, différente de celle décrite par les satellites. 70 ms = décalage émission/réception La terre aura alors bougé de (70.10^-3s)x(450m/s)=31 m !!! On constate alors que même si le décalage est minime, il influe énormément sur la position donnée.
 pendant le trajet de l’onde. Durant l’émission du signal, aussi court soit-il, la terre va évoluer à une certaine vitesse, différente de celle décrite par les satellites. 70 ms = décalage émission/réception. La terre aura alors bougé de (70.10^-3s)x(450m/s)=31 m !!! On constate alors que même si le décalage est minime, il influe énormément sur la position donnée.")
11
II. Imprécisions introduites par les paramètres suivants :
A) Imprécisions physiques Les signaux traversent l ’atmosphère :
 Imprécisions physiques. Les signaux traversent l ’atmosphère :")
13
Matérialisation de la vapeur d ’eau caractérisant la troposphére

14
Influence sur la distance parcourue
Mais les problèmes pour le signal G.P.S continuent ... Le signal peut être réfléchi plusieurs fois avant d'atteindre le récepteur Influence sur la distance parcourue

15
Géométrie satellitaire :
Configuration conduisant à une mauvaise précision ( grande valeur DOP=dilution géométrique de la précision ) Configuration conduisant à une bonne précision (faibles valeurs DOP)
 Configuration conduisant à une bonne précision. (faibles valeurs DOP)")
16
Évolution de la répartition des satellites en fonction du temps
latitude Nord de l'observateur longitude Ouest de l'observateur altitude de l'observateur indicateur de dilution de la précision générale indicateur de dilution de la précision horizontale indicateur de dilution de la précision de position indicateur de dilution de la précision verticale

17
Faible valeur GDOP = répartition homogène des satellites

18
Les satellites se rapprochent les uns des autres = valeur GDOP croît

19
La position des satellites se chevauche = valeur GDOP à son maximum

20
Non Synchronisation Horloge Satellite Horloge Récepteur
C) Imprécision introduite par la non synchronisation des horloges Horloge Satellite Horloge Récepteur Précision 10^-6 Précision 10^-9 Non Synchronisation
 Imprécision introduite par la non synchronisation des horloges. Horloge Satellite. Horloge Récepteur. Précision 10^-6. Précision 10^-9. Non Synchronisation.")
21
C) Erreurs introduites par le calcul des coordonnées locales
Le système de coordonnées X , Y, Z (système de coordonnées géocentriques ECEF) le système ENU (East, North, Up)
 le système ENU (East, North, Up)")
22
Valeurs Aléatoires suivant le milieu topographique

23
La conversion entre les deux systèmes est donc source d ’erreur
La terre n ’est pas une sphère Les valeurs f et N, dépendantes du milieu ne sont pas des constantes La conversion entre les deux systèmes est donc source d ’erreur

24
III ) Comment appréhender ces imprécisions ?
1. Utilisation mathématique .

25
Nous pouvons établir une équation prenant en compte ces différentes erreurs :
L’équation fondamentale devient alors : Inconnues

26
Aucune Correction

27
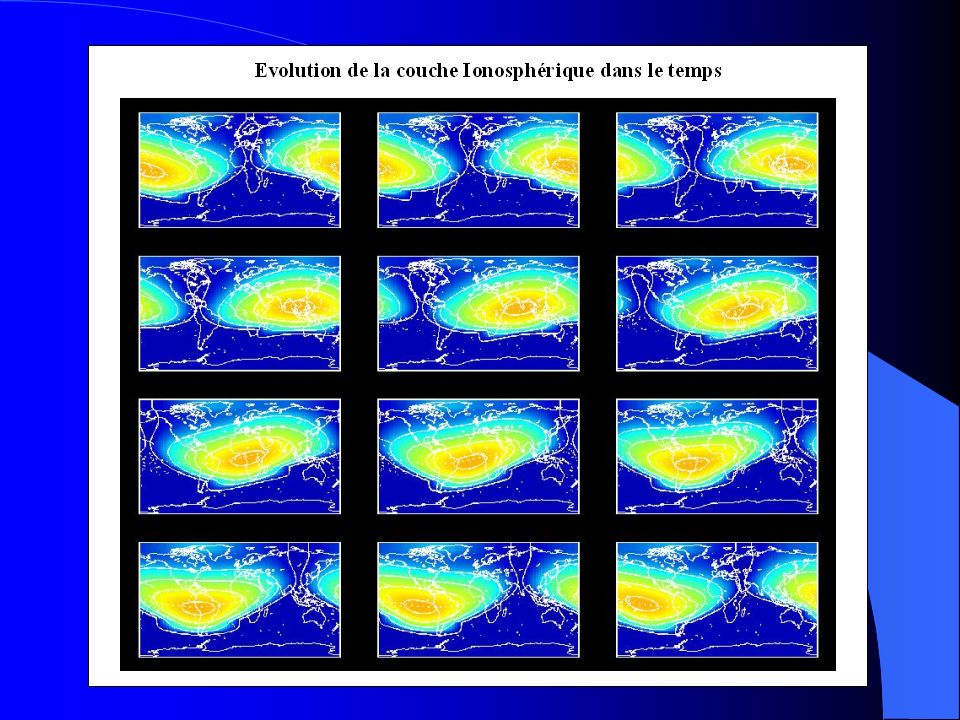
résultat pour la solution exempte de retard ionosphérique
2. Utilisation des horloges atomiques et des données météorologiques et physiques : a) Ionosphère a) Ionosphère a) Ionosphère a) Ionosphère a) Ionosphère a) Ionosphère a) Ionosphère a) Ionosphère a) Ionosphère a) Ionosphère résultat pour la solution exempte de retard ionosphérique
 Ionosphère. a) Ionosphère. a) Ionosphère. a) Ionosphère. a) Ionosphère. a) Ionosphère. a) Ionosphère. a) Ionosphère. a) Ionosphère. a) Ionosphère. résultat pour la solution exempte de retard ionosphérique.")
28
B) Les horloges b) Les horloges schéma exempt de retard ionosphérique et d’une synchronisation des horloges quasi-parfaite.

29
améliorer la précision des mesures GPS verticales
C) La troposphère logiciels scientifiques de traitement estimer numériquement le retard améliorer la précision des mesures GPS verticales
 La troposphère. logiciels scientifiques de traitement. estimer numériquement le retard. améliorer la précision des mesures GPS verticales.")
30
4. Le mode différentiel ou pseudo-différentiel

32
Ci dessous un tableau comparatif normal différentiel en mode SPS pour l'erreur RMS :
Mode absolu (m) 0 km à 100km à 200km à 500km à 1000km à 1500km erreur RMS 33m 2m 2 à 4m 3 à 6 m 10 m 19.7m 23.5m
 0 km. à 100km. à 200km. à 500km. à 1000km. à 1500km. erreur RMS. 33m. 2m. 2 à 4m. 3 à 6 m. 10 m. 19.7m. 23.5m.")
33
CONCLUSION : Dans le futur : G.P.S III et GALILÉO :
Améliorer la visibilité Renforcer la fiabilité du système Améliorer les horloges








 La modélisation moléculaire : optimisation.>")

 : I. Propriétés physiques des roches : densités, aimantations induites et.>")











