Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Optimisation non différentiable

2
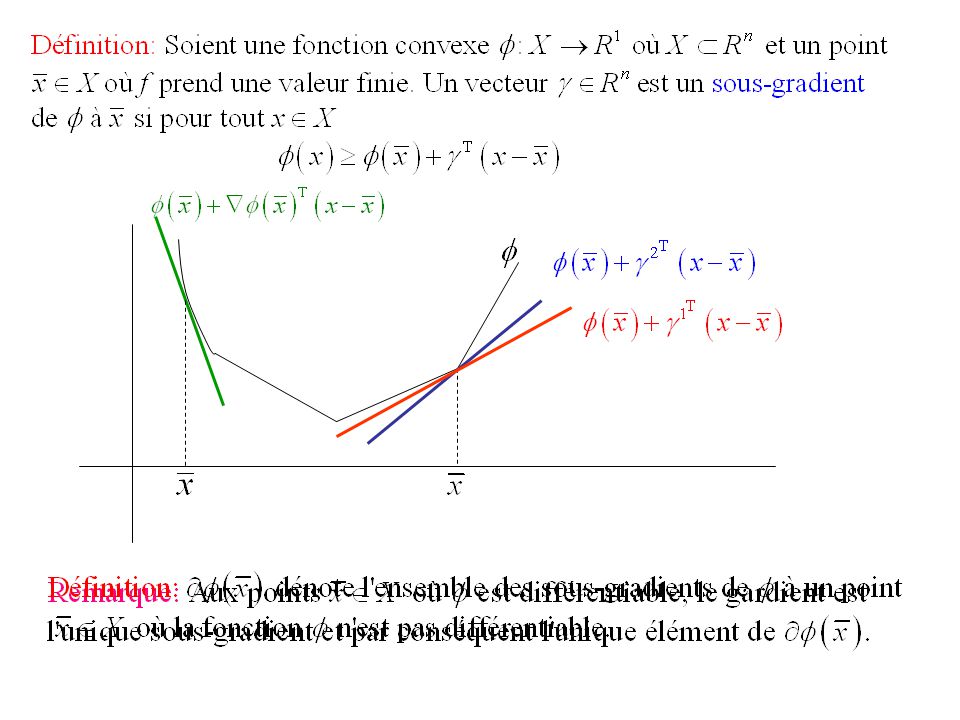
Ce chapitre est consacré aux méthodes de type sous-gradient pour résoudre des problèmes de programmation mathématique où la fonction économique nest pas différentiable en tout point. Les sous-gradients tiennent la place quoccupe les gradients lorsque la fonction économique est différentiable.

3
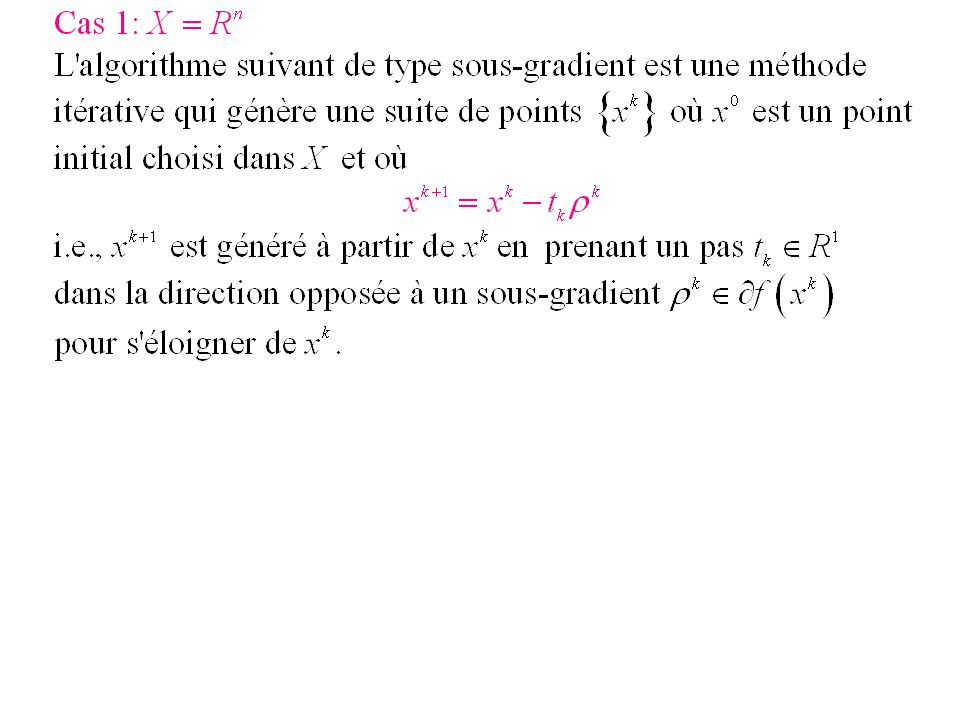
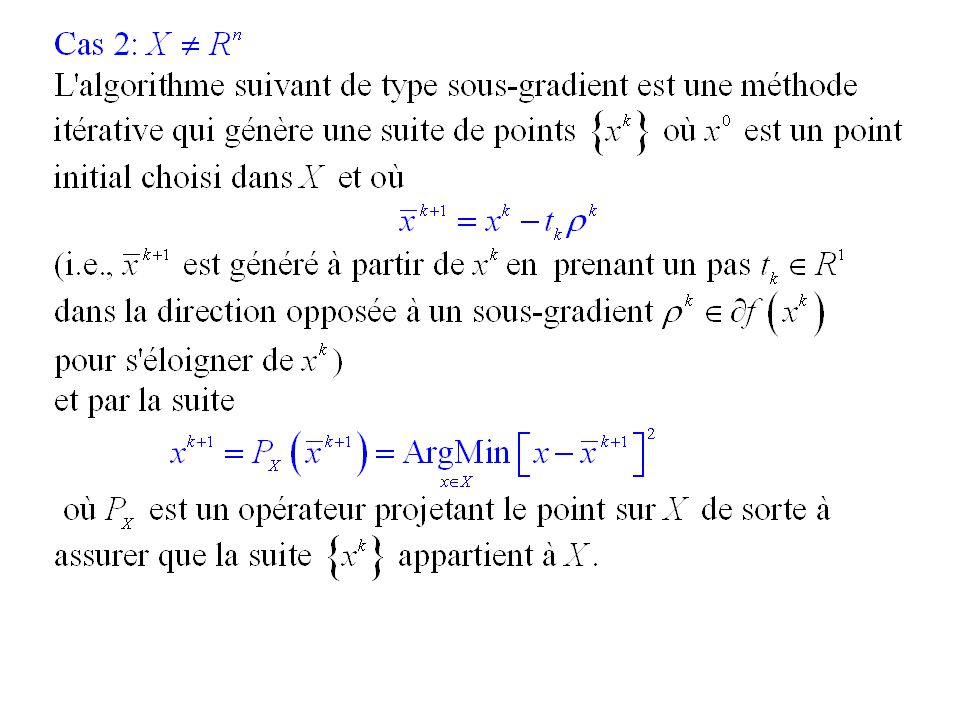
Méthode du sous-gradient

7
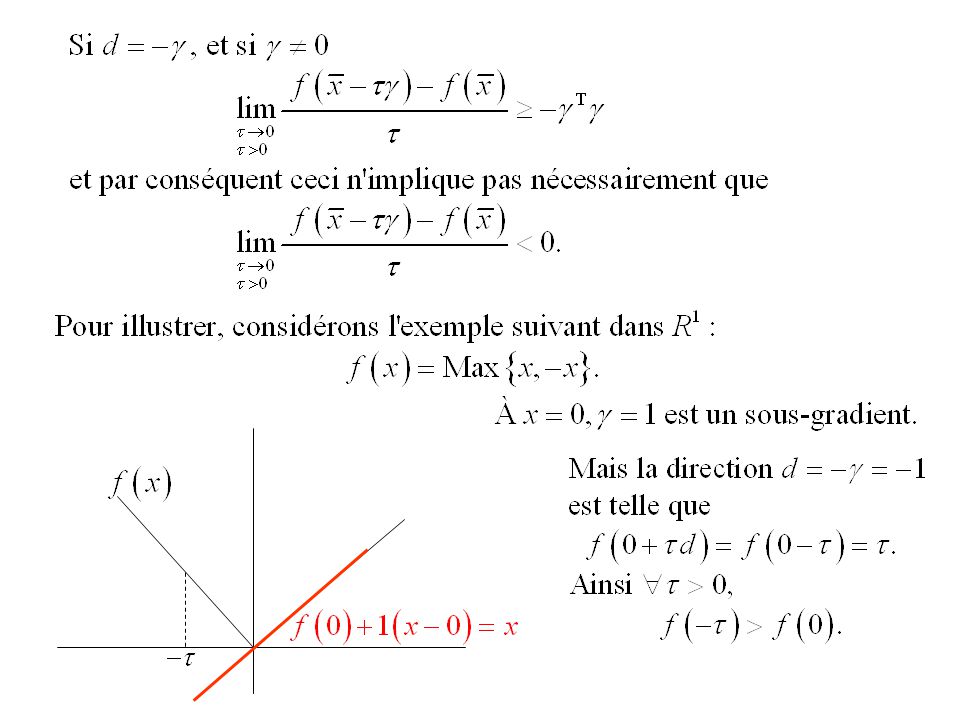
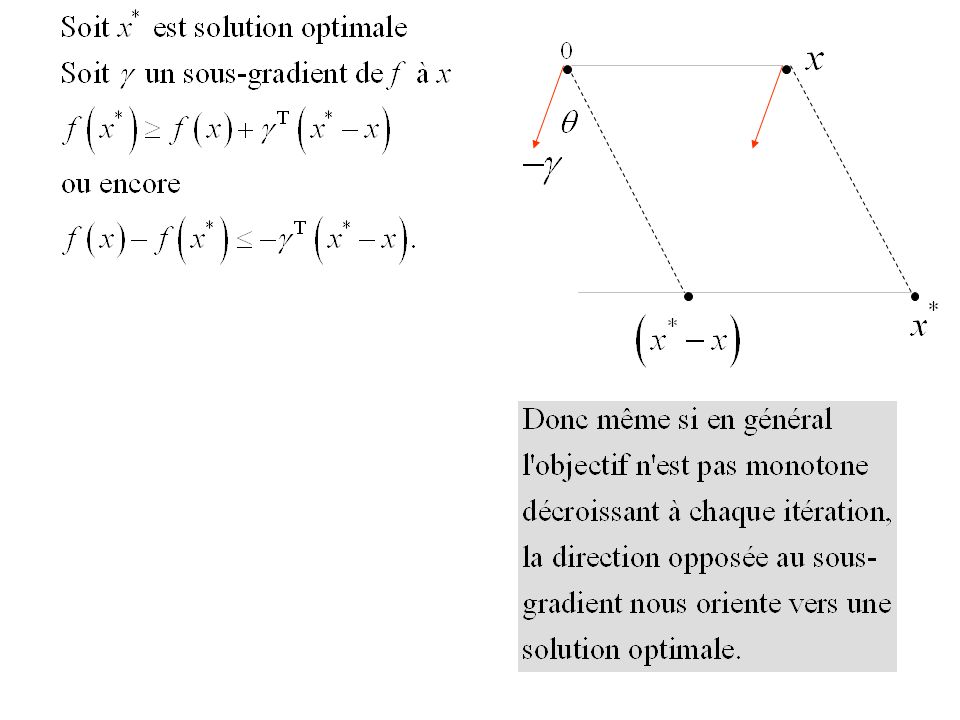
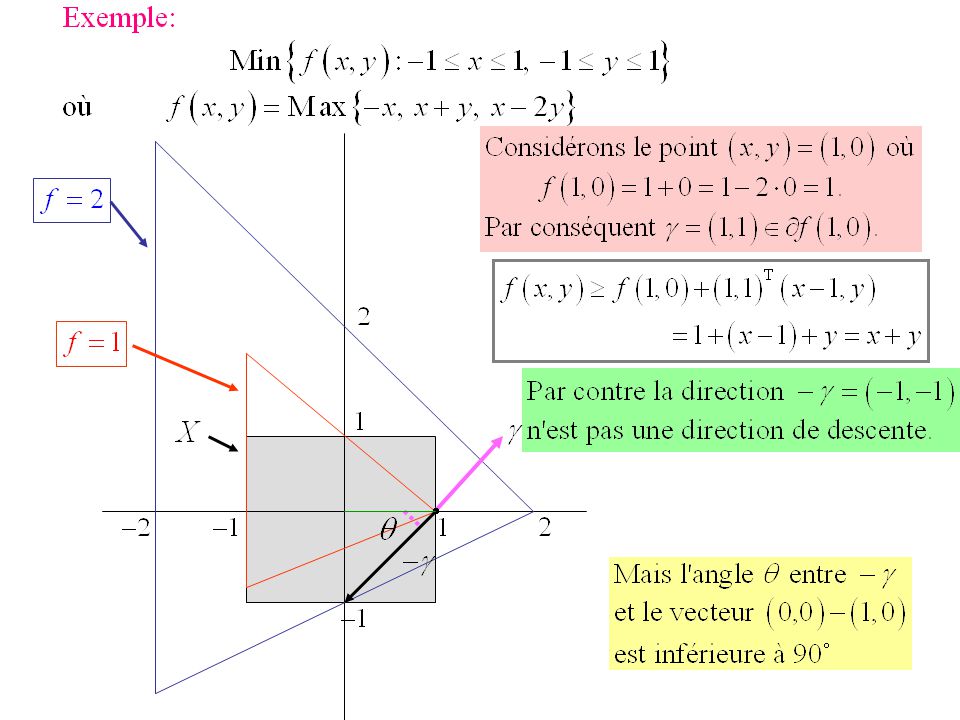
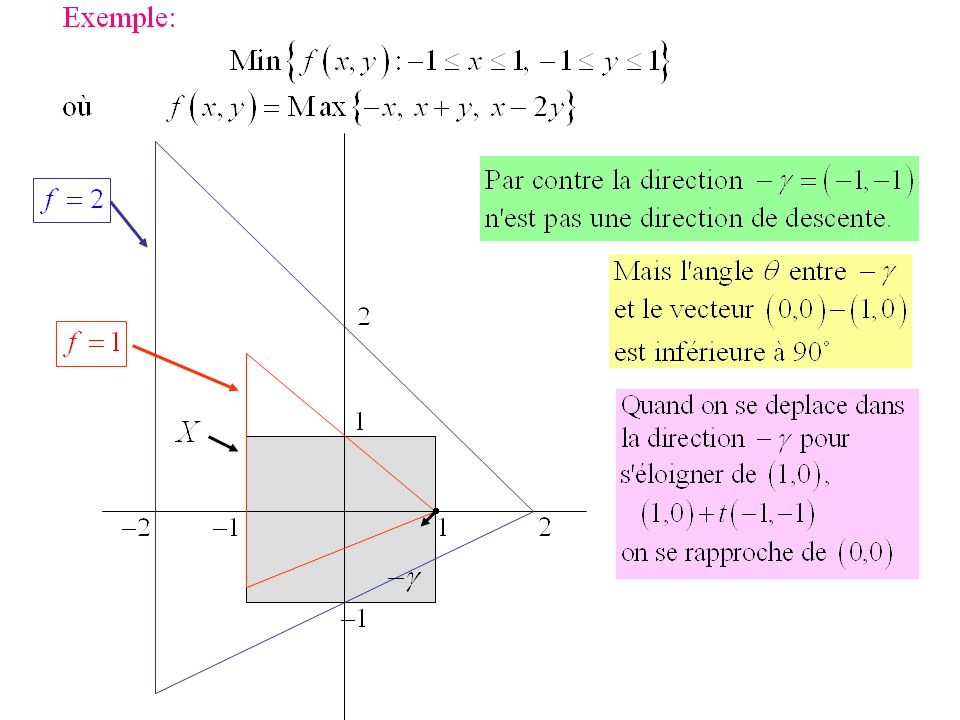
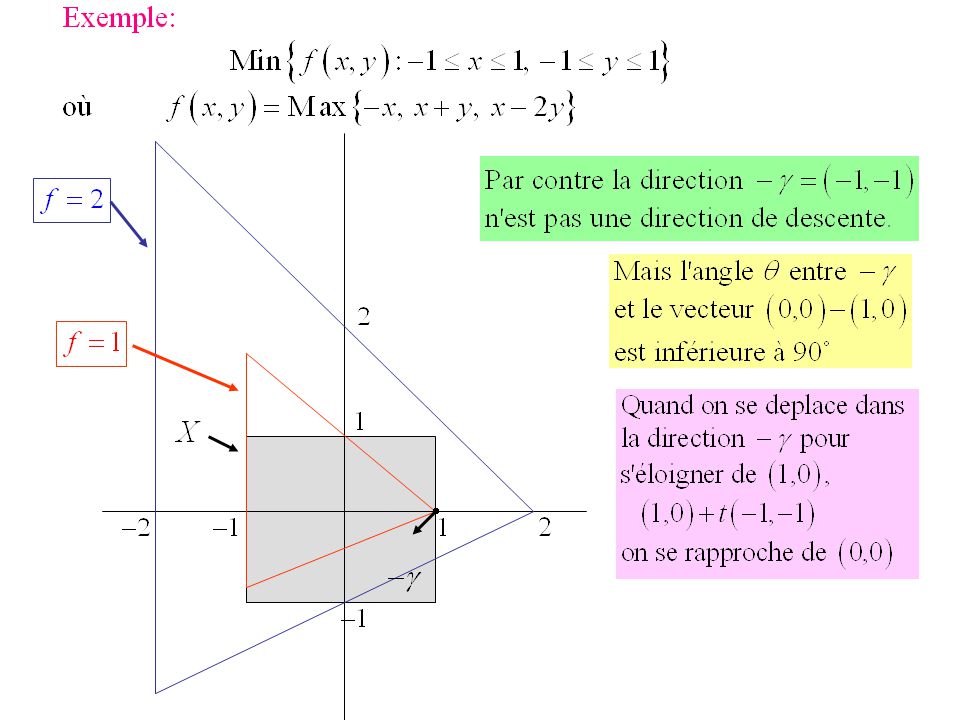
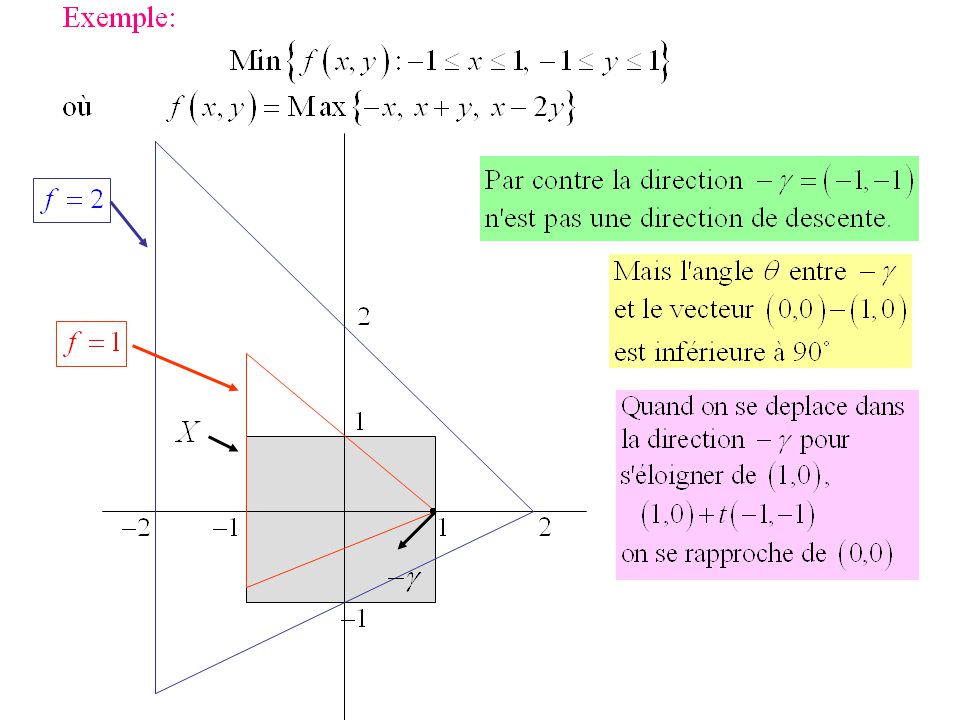
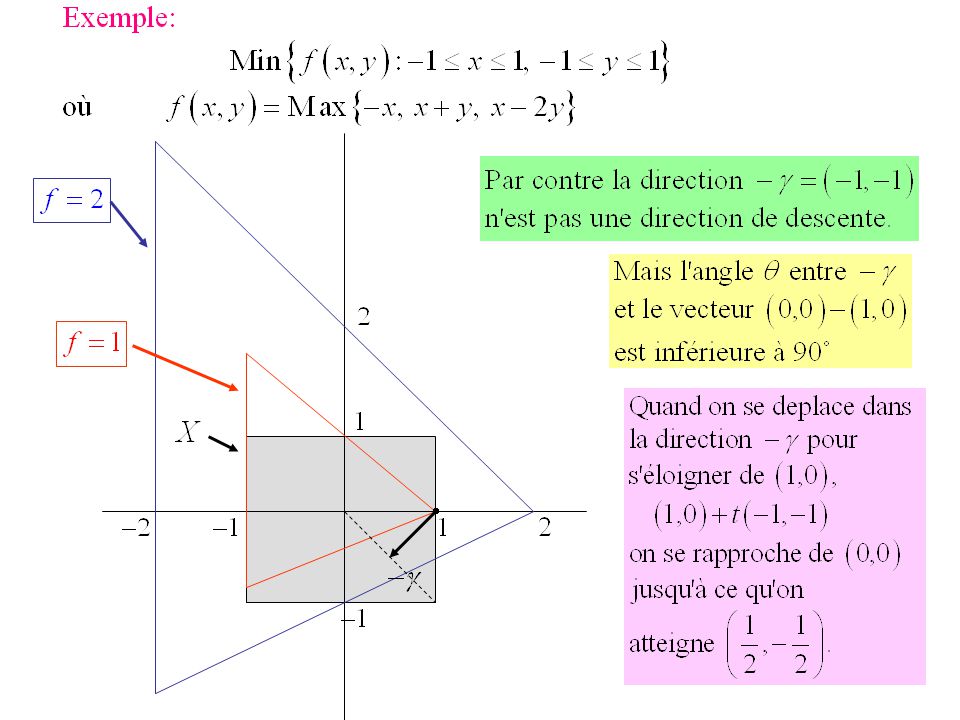
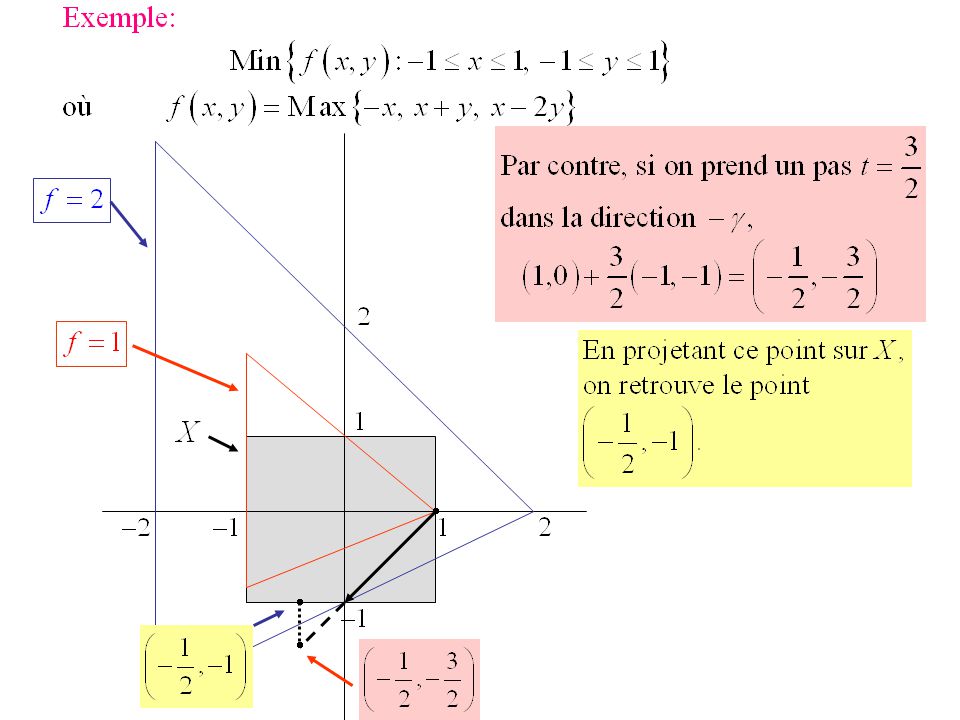
Direction opposée au sous-gradient

13
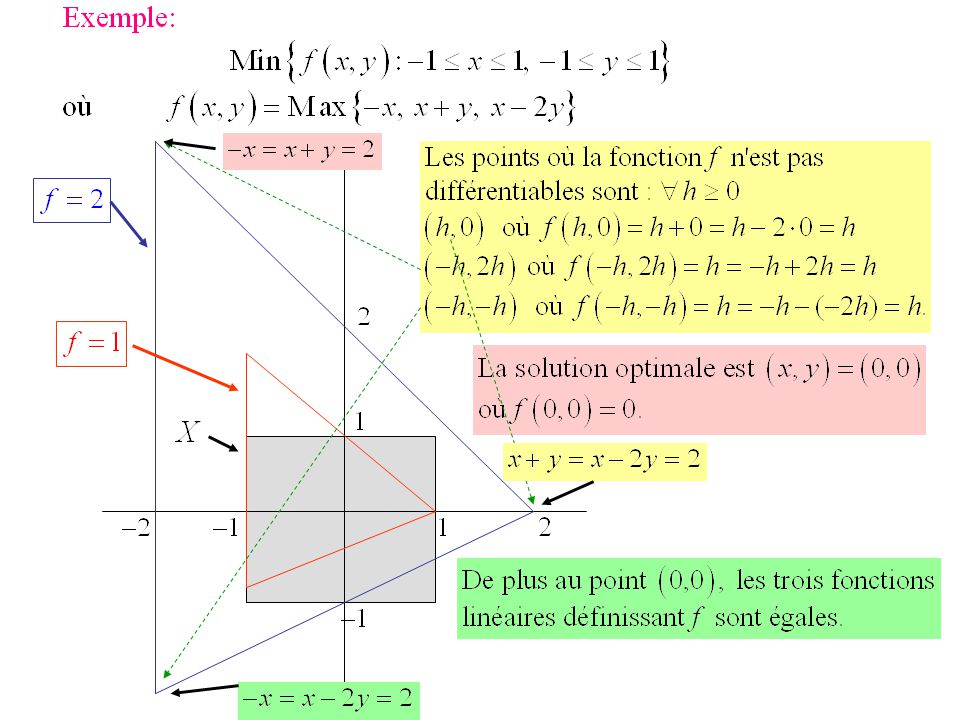
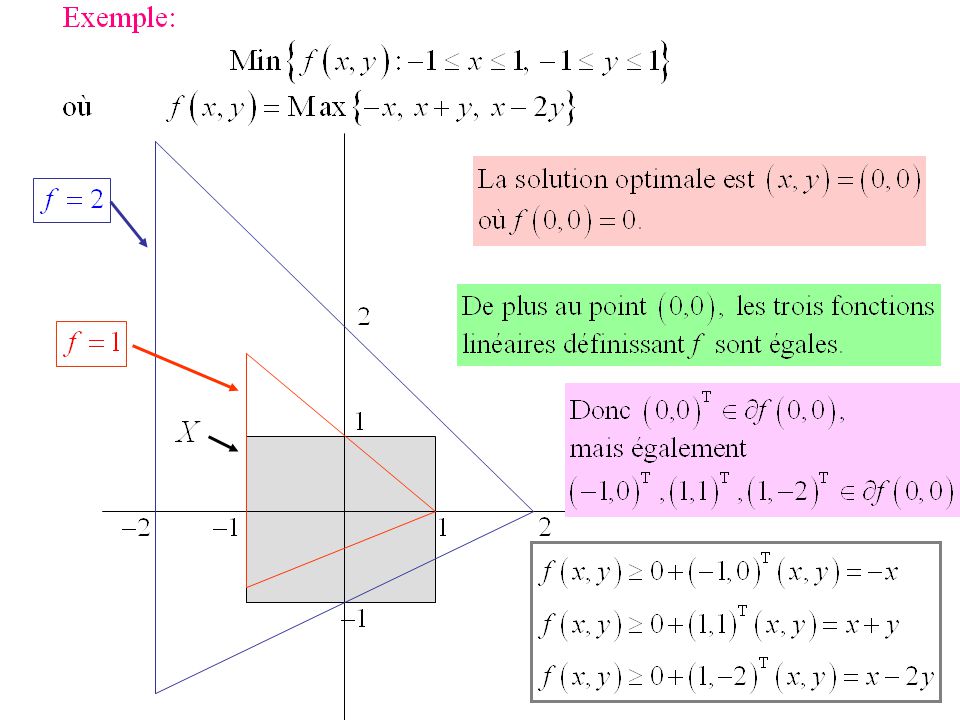
Condition doptimalité

23
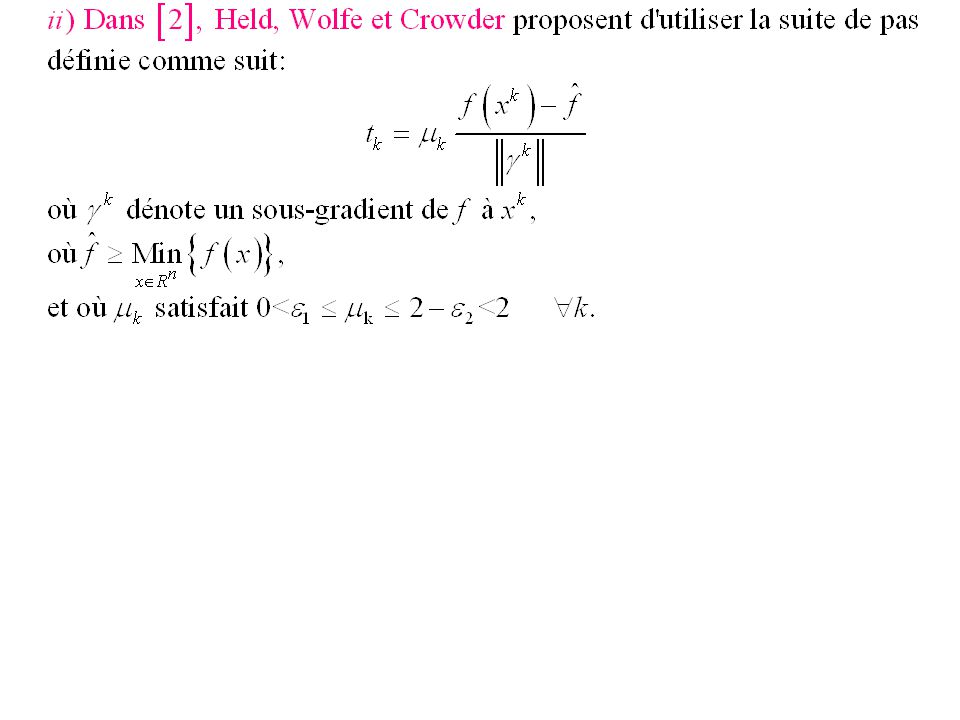
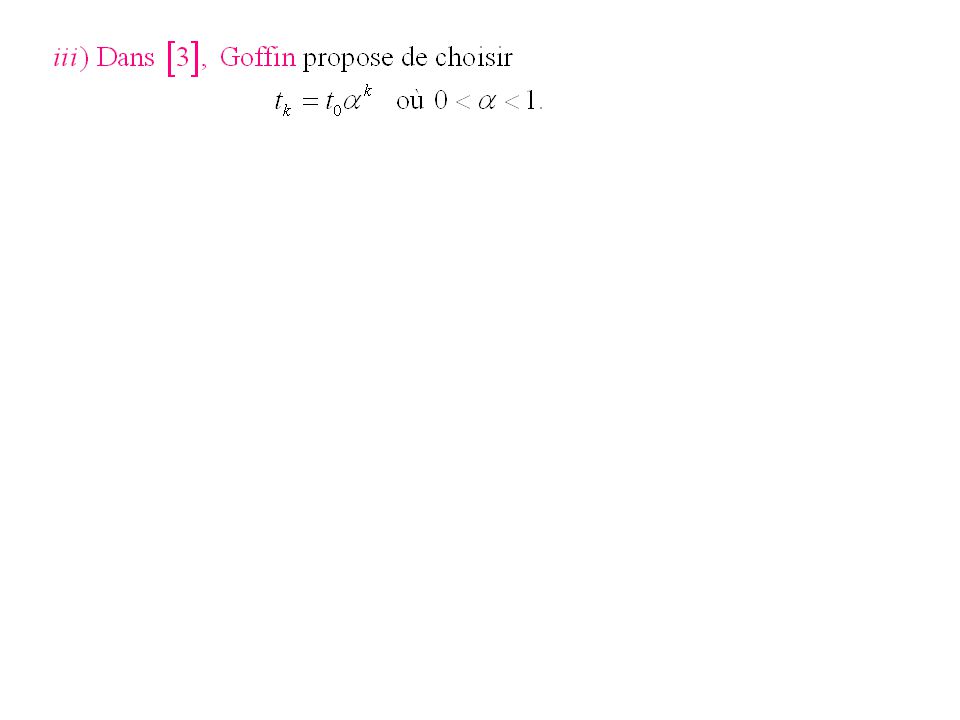
Choix du pas t k

29
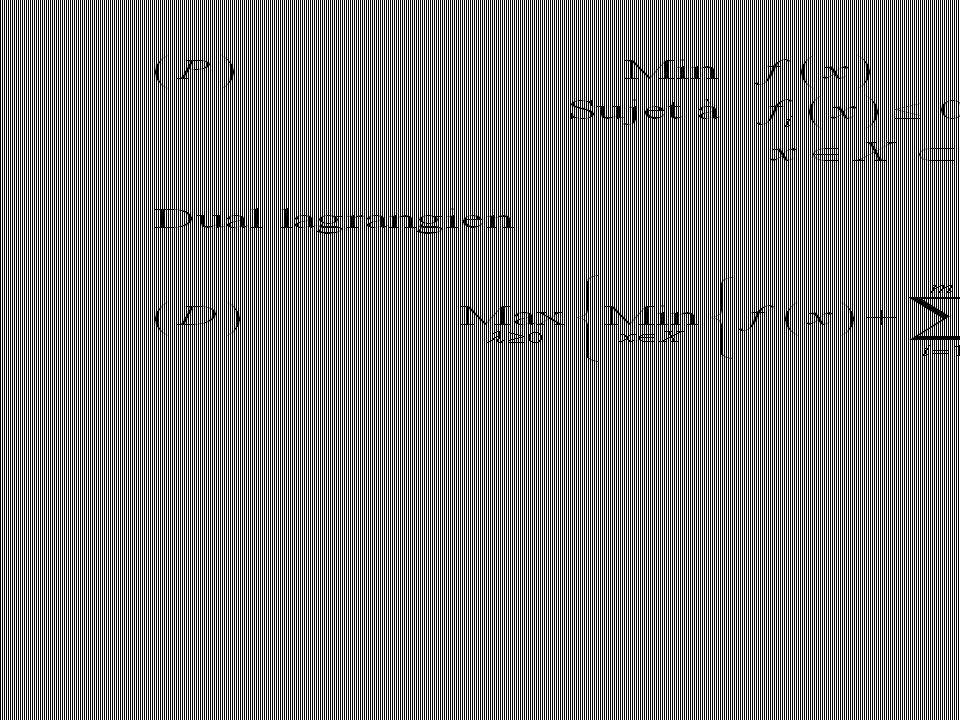
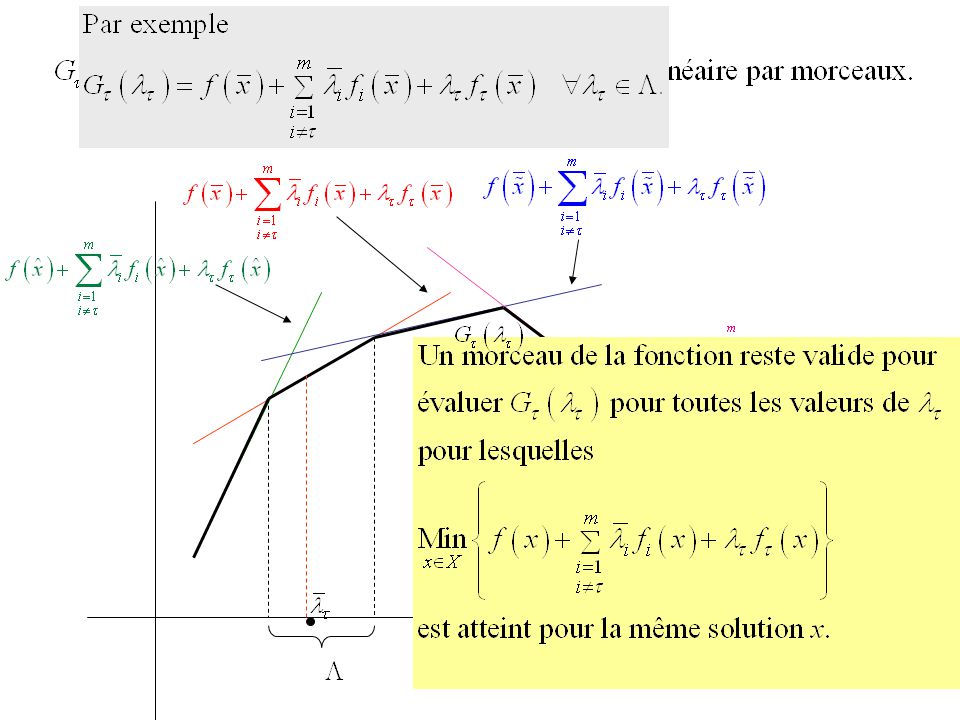
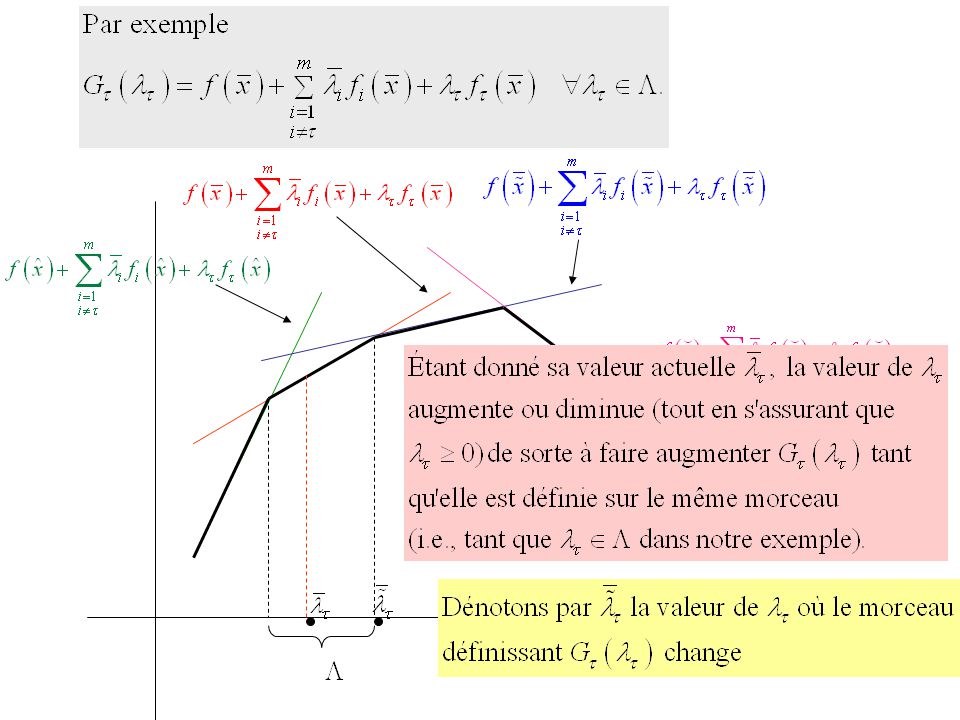
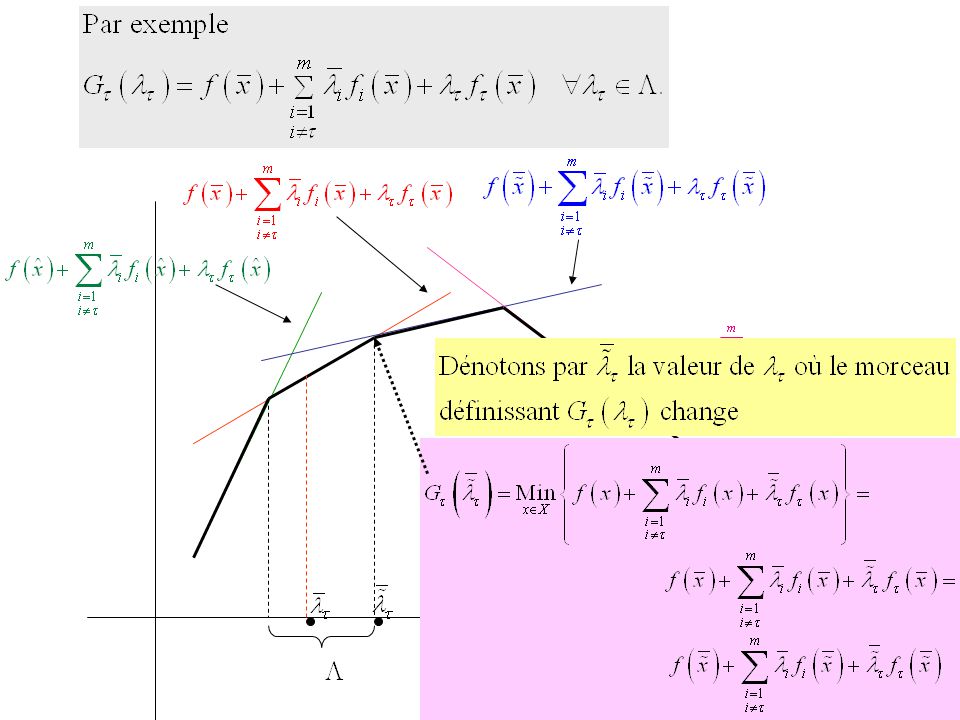
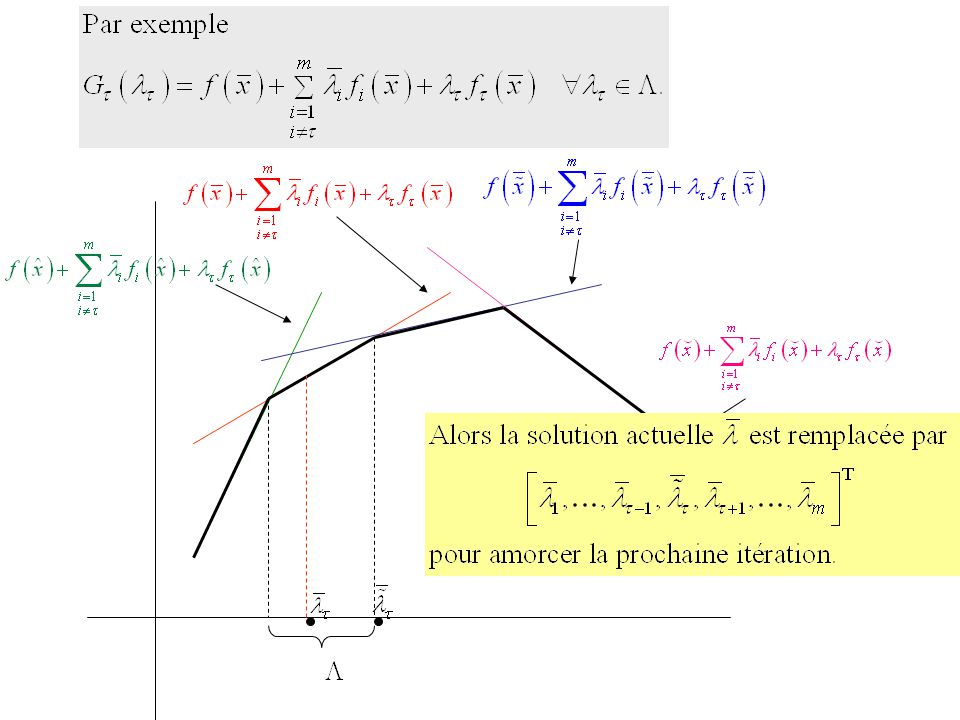
Dual Ascent Method

40
Références [1] Polyak B.T. (1967), A General Method of Solving Extremum Problems, Soviet Mathematics Doklady 8, 593-597. [2] Held M., Wolfe P., Crouwder H.P. (1974), Validation of Subgradient Optimization Mathematical Programming 6, 62-88. [3] Goffin J.L. (1977), On Convergence Rates of Subgradient Optimization Methods, Mathematical Programming 13, 329-347. [4] Shor N.Z. (1970), Convergence Rtae of the Gradient Descent Method with Dilatation of the Space, Cybernatic 6, 102-108. [5] Lemaréchal C. (1978), Nonsmooth Optimization and Descent Methods International Institute for Applied Systems Analysis, Research Report 78-4, Laxenburg, Austria [6] Minoux M. (1993), Programmation Mathématique, Théorie et Algorithmes, Dunod, Paris. [7] Balakrishnan A., Magnanti T.L., Wong R.T., (1989) A Dual-Ascent Procedure for Large-Scale Uncapacitated Network Design, Operations Research 37, 716-740.
![Références [1] Polyak B.T.](http://images.slideplayer.fr/4/1550207/slides/slide_40.jpg "(1967), A General Method of Solving Extremum Problems, Soviet Mathematics Doklady 8, [2] Held M., Wolfe P., Crouwder H.P. (1974), Validation of Subgradient Optimization Mathematical Programming 6, [3] Goffin J.L. (1977), On Convergence Rates of Subgradient Optimization Methods, Mathematical Programming 13, [4] Shor N.Z. (1970), Convergence Rtae of the Gradient Descent Method with Dilatation of the Space, Cybernatic 6, [5] Lemaréchal C. (1978), Nonsmooth Optimization and Descent Methods International Institute for Applied Systems Analysis, Research Report 78-4, Laxenburg, Austria [6] Minoux M. (1993), Programmation Mathématique, Théorie et Algorithmes, Dunod, Paris. [7] Balakrishnan A., Magnanti T.L., Wong R.T., (1989) A Dual-Ascent Procedure for Large-Scale Uncapacitated Network Design, Operations Research 37,")
Présentations similaires













 - D1 - 11/01/2014 Diffusion.>")








