Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Alexandre Morgand Pierre Parutto

3
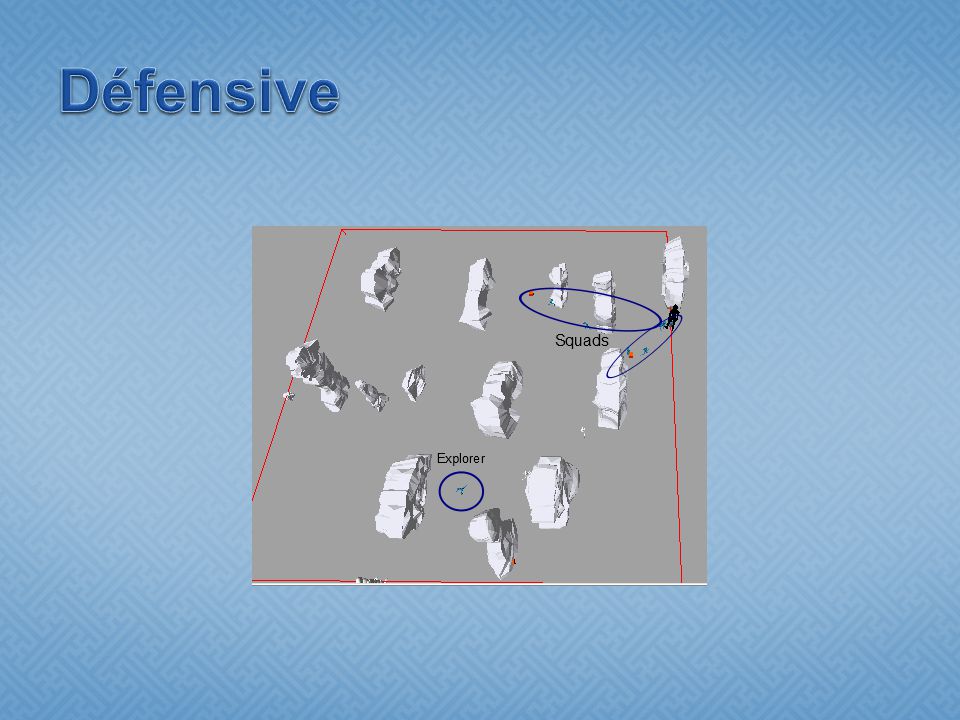
6 ressources placées aléatoirement 3 types de robot Base : Perception 10 m et 360° de vision Explorateur : Perception 10m et 120° de vision Lanceur de missiles : Perception 5m et 120° de vision Configuration initiale différente selon la stratégie

4
3 signaux Hurt (réception des dégâts sur un agent UnderAttack (émit par la base lors dune attaque reçue) Attack (signal pour généraliser lattaque) Black-Board Stocker lemplacement des ressources Stocker lemplacement de la base ennemie Stocker la position de la ressource la plus proche
 Attack (signal pour généraliser lattaque) Black-Board Stocker lemplacement des ressources Stocker lemplacement de la base ennemie Stocker la position de la ressource la plus proche")
6
Exploration initiale jusquà trouver 2 ressources

7
Récolte en masse

8
Attaque en 2 phases Regroupement

9
Attaque en 2 phases Attaque

10
Very bad day

Présentations similaires