Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Multivariable I: un exemple applicatif
Introduction au problème & Modélisation Multivariable I: un exemple applicatif En collaboration avec: -ESO -Observatoire de Genève Michellod Yvan Dr. Müllhaupt Philippe MER Denis Gillet

2
Introduction Introduction au problème La solution proposée
Modélisation et équations d’états Commande à priori

3
Introduction VLTI: Very Large Telescope Interferometer Site:
Chili, Paranal

4
Introduction

5
Introduction Perturbations Atmosphérique Compensation avec une ligne à
Retard différentielle Active Tracking d’une référence stochastique

6
Cahier des charges Spécifications Course complète > 60mm
Bande passante > 200 Hz Précision ~1nm Mode de résonance mécanique > 150 Hz Dissipation maximum < 5W

7
Solution existante Bande passante élevée et Grande précision (de l’ordre du nanomètre): > Actuateur piézoélectrique
: > Actuateur piézoélectrique.")
8
Rappel: l’effet piézoélectrique
Actuateur: Un matériau se déforme sous l’action d’un champs électrique extérieur Capteur: Un matériau génère un champs électrique sous l’effet d’une contrainte mécanique externe

9
L’effet piézoélectrique
Déformation contrôlée

10
Le piézo: actuateur idéal?
Non > Course limitée … (typiquement <30 um)
")
11
Autre solution (suite)
Précision et grande course > Moteur classique Choix: NEMA 17, moteur pas à pas avec vis de transmission de précision (Ultra motion)
")
12
Le moteur classique (suite)
")
13
Le moteur classique (suite)
Mais Précision dynamique en tracking, trop limitée Bande passante trop limitée …

14
Solution adoptée Combinaison des deux actionneurs pour contrôler efficacement la sortie Piézo pour la vitesse et la précision Moteur pour la course complète Guidage mécanique par un système à lames pour coupler les deux étages Système multivariable

15
Solution adoptée

16
Définition Un système est dit suractionné s’il possède un nombre plus grand d’actionneurs indépendants que de degrés de liberté Notre application: 1 degré de liberté pour 2 actionneurs

17
Le prototype

18
Système complet

19
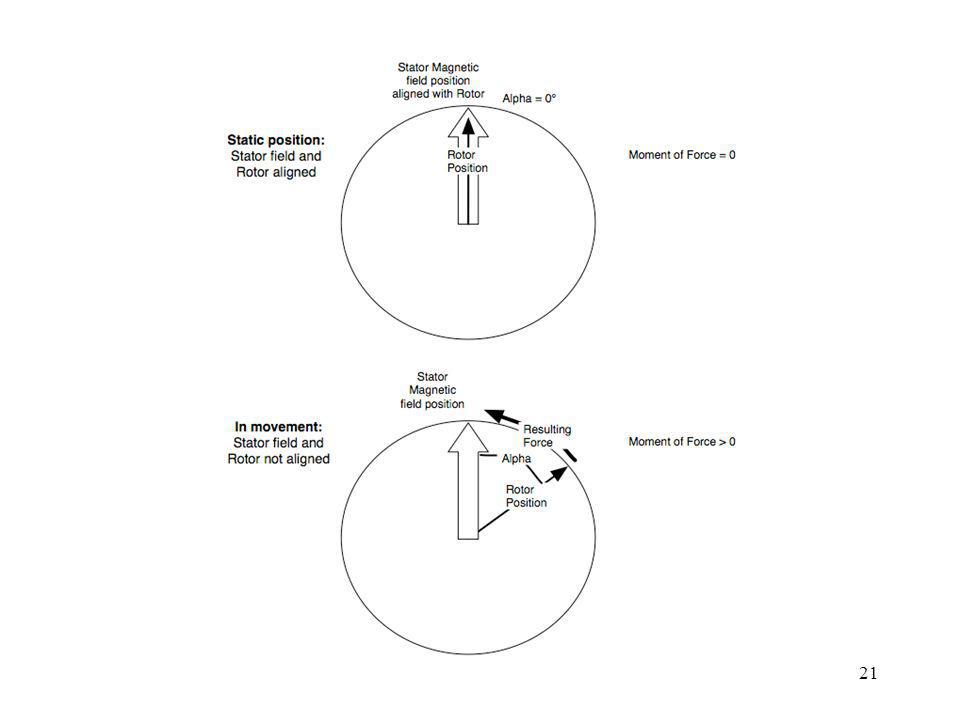
Modèle du moteur Il s’agit d’un moteur synchrone à aimant permanent.
On contrôle la tension des phases du moteur, groupées 2 par 2 en parallèle. Le problème du frottement sec, ainsi que du jeu dans la transmission sont négligés.

20
Equations d’état Les 2 tensions de contrôle ua et ub, ne sont pas indépendantes: elles doivent être en quadrature (90°).
.")
22
Equations d’état (suite)
Simplification du modèle: Approximation du 2ième ordre

23
Modèle du piézo Le piézoélectrique peut être modélisé, en première approximation, comme un circuit électrique RC. Dont la tension sur la capacité est proportionnel au mouvement réalisé. i R u c U C

24
Modèle du piézo

25
Modèle d’état global

26
Modèle d’état global Représentation continue Représentation discrète
y(t) u(t) D A A D Représentation discrète u(kh) y(kh)
 u(t) D. A. A. D. Représentation. discrète. u(kh) y(kh)")
27
Modèle d’état global 1) Calcul exact à l’aide d’un logiciel adéquat (Mathematica) Mathematica Simplify[InverseLaplaceTransform[Inverse[sI - A], s, kh]] Ou plus simplement MatrixExp[A*h]

28
Modèle d’état global 2) Théorème de Cayley-Hamilton
Valeurs propres de A: Coefficients du polynôme P(A):
:")
29
Modèle d’état global discret
Evaluation numérique via Matlab

30
Comparaison: Continu/Discret
Dans Matlab: définition du modèle d’états à partir de ces matrices Continu: Discret: Représentation du diagramme de Bode en amplitude: bodemag(Mc, Md)
")
31
Comparaison: Continu/Discret
Matlab: Md=c2d(Mc,h)
")
32
Commande a priori Maintenant que le système a été modélisé
Elaboration d’une commande en « feed forward » En boucle ouverte Sans utilisation de capteur Basée entièrement sur le modèle de connaissance

33
Commande a priori Piézo Moteur Approximation statique Résultat:
Rampe du moteur

34
A suivre Commande en boucle fermée Schéma de contrôle suractionné
Observateur Réglage découplé: PID Réglage d’état Intéressé? -> Projets de semestre

35
FIN

Présentations similaires


![[number 1-100].](/1/172887/big_thumb.jpg "[number 1-100].>")











 et dénombrer (Entoure dans la bande numérique.>")




