Télécharger la présentation
1
Maxpid Statique Corrigé

2
La chaîne fonctionnelle MAXPID
dans le robot de tri 3 axes Pellenc bras Axe R4 Axe R3 La commande de déplacement du préhenseur est asservie en position afin de prendre l’objet repéré par caméra Axe R2

3
La chaîne fonctionnelle MAXPID
dans le robot de tri 3 axes Pellenc bras La commande de déplacement du préhenseur est asservie en position afin de prendre l’objet repéré par caméra Plongée verticale du préhenseur vers les objets à trier Rapidité: 2000 cycles par heures Précision: + /- 1cm en bout de bras longueur 1400mm Dépassement toléré D1=10%

4
La chaîne fonctionnelle MAXPID
dans le robot cueilleur de fruits 3 axes Pellenc bras Axe R4 Axe R3 La commande de déplacement du préhenseur est asservie en position afin de prendre l’objet repéré par caméra Axe R2 Plongée horizontale du préhenseur vers les fruits

5
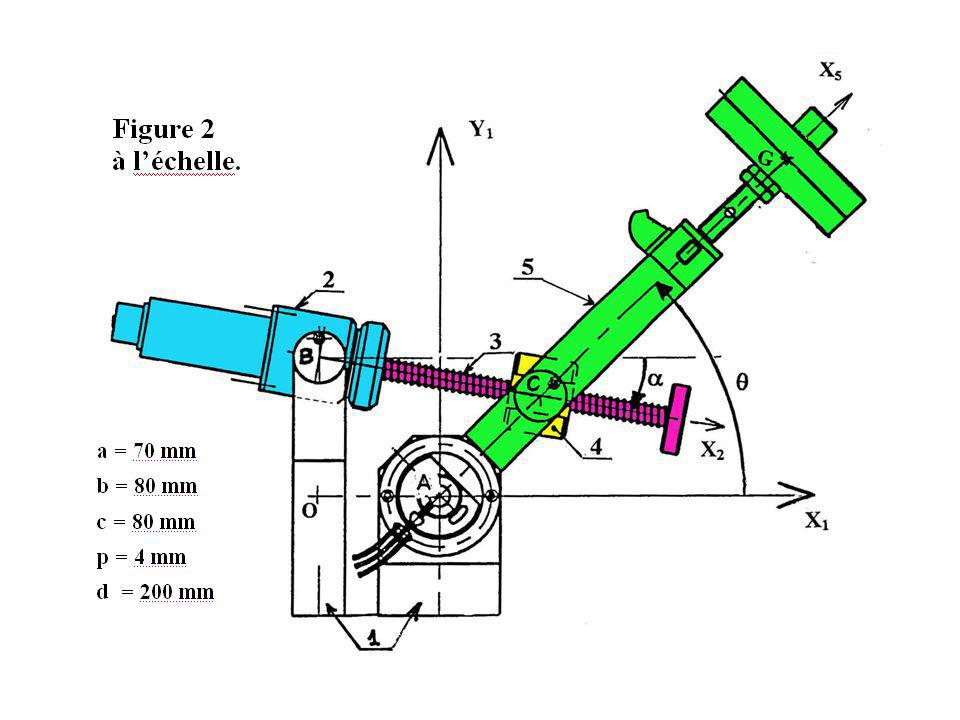
Sous-système Maxpid

6
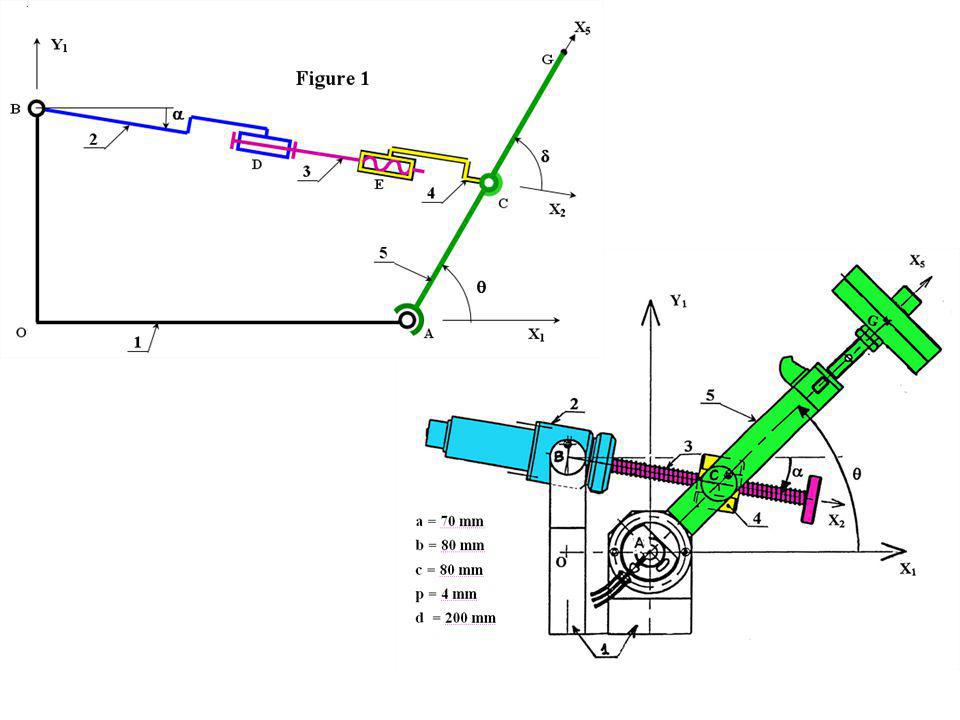
Sous-système Maxpid

8
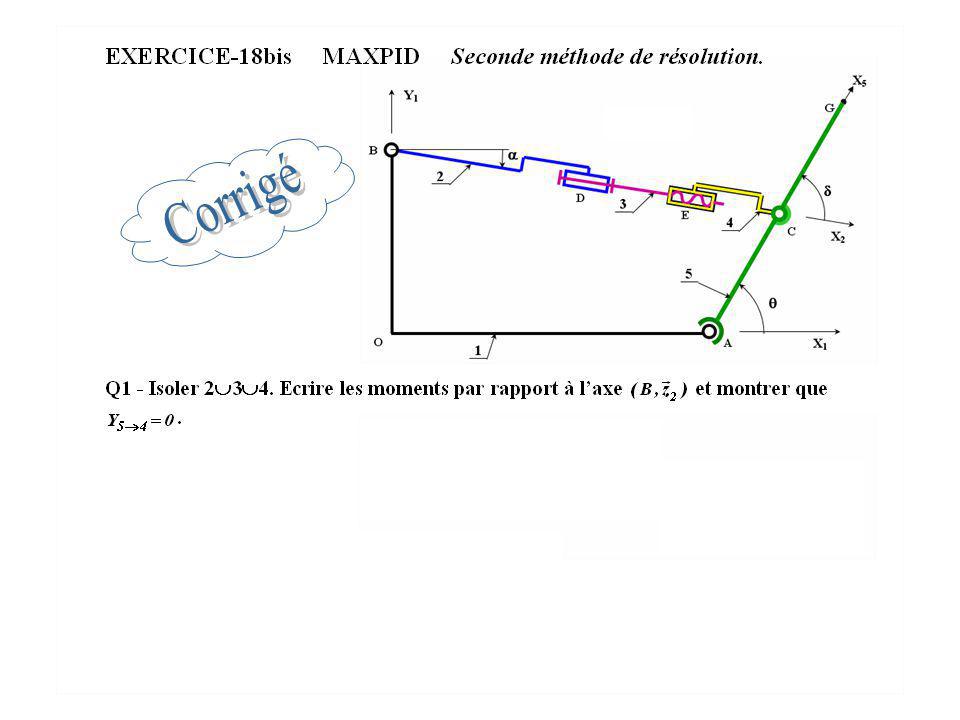
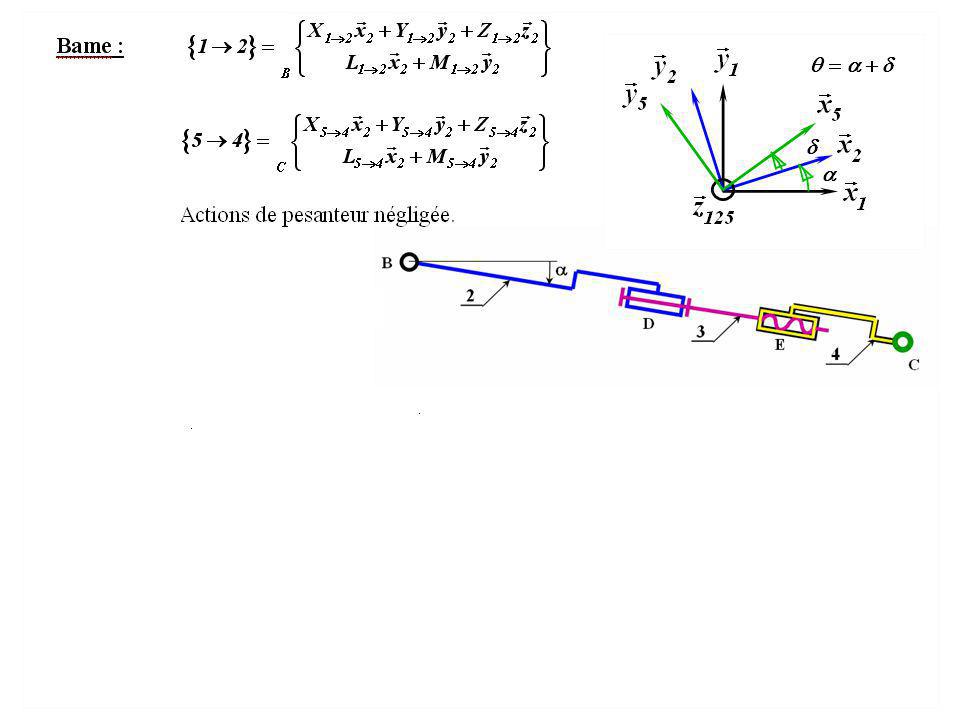
Sous-système Maxpid

16
Fin