Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Modélisation bayésienne de la perception et de l’action
Julien Diard Laboratoire de Psychologie et NeuroCognition – CNRS UE Cognition bayésienne 03/02/2009

3
Plan Modélisation bayésienne de la perception
Introduction à la perception multi- Perception visuo-haptique (Ernst & Banks, 02) Perception visuo-acoustique des voyelles Questions ouvertes Modélisation bayésienne de l’action Introduction au contrôle moteur Modèle de minimum variance Modélisation de la perception et de l’action: boucles sensorimotrices Exemple : modélisation de l’écriture
 Perception visuo-acoustique des voyelles. Questions ouvertes. Modélisation bayésienne de l’action. Introduction au contrôle moteur. Modèle de minimum variance. Modélisation de la perception et de l’action: boucles sensorimotrices. Exemple : modélisation de l’écriture.")
4
Plan Modélisation bayésienne de la perception
Introduction à la perception multi- Perception visuo-haptique (Ernst & Banks, 02) Perception visuo-acoustique des voyelles Questions ouvertes Modélisation bayésienne de l’action Introduction au contrôle moteur Modèle de minimum variance Modélisation de la perception et de l’action: boucles sensorimotrices Exemple : modélisation de l’écriture
 Perception visuo-acoustique des voyelles. Questions ouvertes. Modélisation bayésienne de l’action. Introduction au contrôle moteur. Modèle de minimum variance. Modélisation de la perception et de l’action: boucles sensorimotrices. Exemple : modélisation de l’écriture.")
5
Modélisation de la perception multi-
Sensorielle / indice multimodale / intramodale Modèle de pondération linéaire (Lambrey, 2005)
")
6
Modèle de pondération sensorielle

7
Modélisation de la perception
Un problème inverse (Poggio, 1984) Modèle bayésien Inversion + hypothèse d’indépendance conditionnelle
 Modèle bayésien. Inversion + hypothèse d’indépendance conditionnelle.")
8
Proprioception (Laurens, 08)
Vision Perception des plans : préférence pour des plans rigides, de stationnaires (Colas, 06) Perception des formes (revue de Kersten et al., 04) : préférence pour les objets convexes préférence pour des lumières venant du haut, stationnaires préférence pour un point de vue situé au dessus de la scène Proprioception (Laurens, 08)
 Perception des formes (revue de Kersten et al., 04) : préférence pour les objets convexes. préférence pour des lumières venant. du haut, stationnaires. préférence pour un point de vue. situé au dessus de la scène. Proprioception (Laurens, 08)")
9
Fusion multi-sensorielle
Fusion multi-indices Haptique : géométrie et force (Drewing & Ernst, 06) Vision (Kersten et al., 04) Fusion multi-sensorielle Visuo-haptique (Ernst & Banks, 02) Visuo-acoustique Localisation de sources (Battaglia et al., 03) effet McGurk Reconnaissance de voyelles (Gilet, 06)
 Vision (Kersten et al., 04) Fusion multi-sensorielle. Visuo-haptique (Ernst & Banks, 02) Visuo-acoustique. Localisation de sources (Battaglia et al., 03) effet McGurk. Reconnaissance de voyelles (Gilet, 06)")
10
Plan Modélisation bayésienne de la perception
Introduction à la perception multi- Perception visuo-haptique (Ernst & Banks, 02) Perception visuo-acoustique des voyelles Questions ouvertes Modélisation bayésienne de l’action Introduction au contrôle moteur Modèle de minimum variance Modélisation de la perception et de l’action: boucles sensorimotrices Exemple : modélisation de l’écriture
 Perception visuo-acoustique des voyelles. Questions ouvertes. Modélisation bayésienne de l’action. Introduction au contrôle moteur. Modèle de minimum variance. Modélisation de la perception et de l’action: boucles sensorimotrices. Exemple : modélisation de l’écriture.")
11
Nature, 429–433, 2002

12
Humans integrate visual and haptic information in a statistically optimal fashion
Mécanisme d’integration visuo-haptique par fusion de gaussiennes Utilisé par les humains

13
Plan Protocole expérimental Modèle bayésien de fusion capteurs
Comparaison du modèle au données

14
Matériel expérimental
Conflit visuo-haptique de perception des longueurs Modèle dominant : MLE Ernst et al. (2002, Nature) MLE : cas particulier de la superposition des cartes bayésiennes Limites mathématiques Apprentissage affecte la précision de chaque modalité mais pas l’opérateur de fusion Conséquence Indépendance des facteurs antérieurs aspects dynamiques, action pour la perception consignes, attention Question Opérateur de fusion est-il cognitivement pénétrable ? Hypothèse vision non pénétrable, haptique oui modulable par l’expérience, opérateur inné ?
 MLE : cas particulier de la superposition des cartes bayésiennes. Limites mathématiques. Apprentissage affecte la précision de chaque modalité mais pas l’opérateur de fusion. Conséquence. Indépendance des facteurs antérieurs. aspects dynamiques, action pour la perception. consignes, attention. Question. Opérateur de fusion est-il cognitivement pénétrable Hypothèse. vision non pénétrable, haptique oui. modulable par l’expérience, opérateur inné")
15
Stimuli visuels

16
Stimuli et tâche 4 niveaux de bruit visuel : 0% 67% 133% 200%
1 niveau haptique 1 s de présentation Tâche de choix forcé laquelle de ces deux barres est la plus grande ?

17
Cas mono-modal

18
Integration visuo-haptique
0%

19
Integration visuo-haptique
0% 67%

20
Integration visuo-haptique
0% 67% 133%

21
Integration visuo-haptique
0% 67% 133% 200%

22
Plan Protocole expérimental Modèle bayésien de fusion capteurs
Comparaison du modèle au données 22

23
Modèle bayésien de fusion « naïve »
23

24
Modèle bayésien de fusion « naïve »
24

25
Modèle bayésien de fusion « naïve »
Estimateur de maximum de vraisemblance Par opposition à Bayésien « Statistiquement optimal » Moindre variance : 25

26
Plan Protocole expérimental Modèle bayésien de fusion capteurs
Comparaison du modèle au données 26

27
Quelles gaussiennes ? Choix d’une gaussienne parmi 2
T = x 55 mm Choix d’une gaussienne parmi 2 Point d’égalité subjective PSE : moyenne Seuil de discrimination 0.04 x 55 mm 27

28
Integration visuo-haptique
0% 67% 133% 200%

29
Comparaison modèle - données
0% 67% 133% 200%

30
Moyennes prédites - observées
30

31
Variances prédites - observées
JND 31

32
Questions, critiques ?

33
Plan Modélisation bayésienne de la perception
Introduction à la perception multi- Perception visuo-haptique (Ernst & Banks, 02) Perception visuo-acoustique des voyelles Questions ouvertes Modélisation bayésienne de l’action Introduction au contrôle moteur Modèle de minimum variance Modélisation de la perception et de l’action: boucles sensorimotrices Exemple : modélisation de l’écriture
 Perception visuo-acoustique des voyelles. Questions ouvertes. Modélisation bayésienne de l’action. Introduction au contrôle moteur. Modèle de minimum variance. Modélisation de la perception et de l’action: boucles sensorimotrices. Exemple : modélisation de l’écriture.")
34
Perception multi-sensorielle
0% 67% 133% 200% En psychophysique Ernst & Banks JND, PSE, … En psychologie cognitive ?

35
Modélisation bayésienne de la perception visuo-acoustique de voyelles

36
Perception audiovisuelle

37
Perception audiovisuelle

38
Remarque

39
Modélisation bayésienne de la perception audiovisuelle
Trois modèles bayésiens Modèle M0 Modèle M1 Modèle M2 Comparaison bayésienne des modèles

40
Espace interne de M0

41
Modèle M0

42
Modèle M0

43
Modèle M0

44
Modèle M0 : résultats

45
Modèle M1

46
Modèle M1 : résultat

47
Modèle M2

48
Modèle M2 : résultat

49
Plan Modélisation bayésienne de la perception
Introduction à la perception multi- Perception visuo-haptique (Ernst & Banks, 02) Perception visuo-acoustique des voyelles Questions ouvertes Modélisation bayésienne de l’action Introduction au contrôle moteur Modèle de minimum variance Modélisation de la perception et de l’action: boucles sensorimotrices Exemple : modélisation de l’écriture
 Perception visuo-acoustique des voyelles. Questions ouvertes. Modélisation bayésienne de l’action. Introduction au contrôle moteur. Modèle de minimum variance. Modélisation de la perception et de l’action: boucles sensorimotrices. Exemple : modélisation de l’écriture.")
50
Question ouverte De nombreux exemples d’application du modèle de fusion Limite de validité du modèle ? Valeur d’un modèle qui s’applique partout ?

51
Plan Modélisation bayésienne de la perception
Introduction à la perception multi- Perception visuo-haptique (Ernst & Banks, 02) Perception visuo-acoustique des voyelles Questions ouvertes Modélisation bayésienne de l’action Introduction au contrôle moteur Modèle de minimum variance Modélisation de la perception et de l’action: boucles sensorimotrices Exemple : modélisation de l’écriture
 Perception visuo-acoustique des voyelles. Questions ouvertes. Modélisation bayésienne de l’action. Introduction au contrôle moteur. Modèle de minimum variance. Modélisation de la perception et de l’action: boucles sensorimotrices. Exemple : modélisation de l’écriture.")
52
Modélisation du contrôle
Mouvements de pointage, volontaire, chez l’humain Etude des régularités Lois du mouvement Hypothèses sur les mécanismes Modèles (neuro)cognitifs
cognitifs.")
53
3 lois Isochronie Loi de Fitts Loi de la puissance 2/3

54
Tâche : Saisie d’un cylindre à différentes distances (40,32,25)
Palluel-Germain, 08 L’Isochronie : la durée du mouvement reste stable quelque soit l’amplitude du mouvement Ex : Saisie (Jeannerod 1984) Vitesse (cm/s) Tâche : Saisie d’un cylindre à différentes distances (40,32,25) Résultats : Temps similaire/augmentation de la vitesse Durée (ms) La durée du mouvement semble fixée à l’avance
 Vitesse. (cm/s) Tâche : Saisie d’un cylindre à différentes distances (40,32,25) Résultats : Temps similaire/augmentation de la vitesse. Durée (ms) La durée du mouvement semble fixée à l’avance.")
55
Cible de taille W à une distance D

56
Loi de puissance de 2/3 V(t) = K * R(t) 1-β K = gain de vitesse V(t) = vitesse du mouvement R(t) = rayon de courbure 1-β = 1/3

57
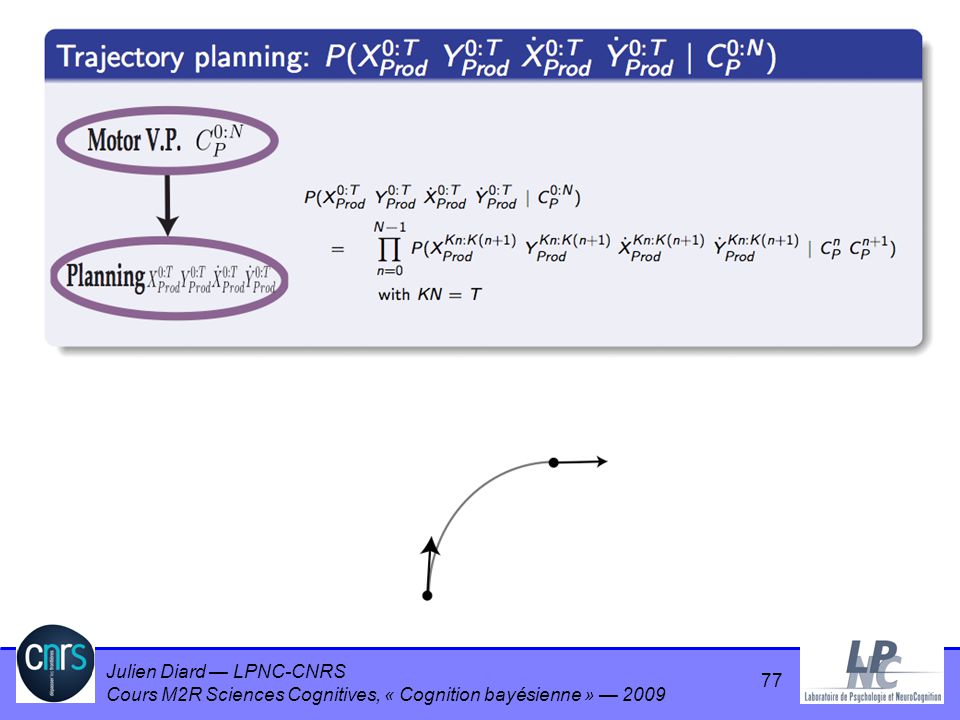
Modèles de planification de mouvements
Sélection d’une trajectoire selon un coût

58
Observations Les trajectoires de la main sont invariantes et quasiment rectilignes quelles que soit les positions initiales et terminales du mouvement et s’accompagnent toutes d’un profil de vitesse en cloche. Au contraire, lorsque les mouvements sont décrits selon leur trajectoire articulaire une grande variabilité est observée

59
Espaces de contrôle Planification intrinsèque Planification extrinsque
Espace articulaire Planification extrinsque Espace cartésien

60
Modèle d’interpolation linéaire dans l’espace articulaire
Changement angulaire des articulations Trajectoire observée D’après Hollerbach & Atkeson (1986)
")
61
Modèle d’interpolation linéaire dans l’espace articulaire
β α

63
Espace de travail Minimisation des dérivées de l’endpoint
n=2 minimum acceleration n=3 minimum jerk n=4 minimum snap

64
Minimum jerk Prédit des segments droits
Pas observés pour des mouvements de grande amplitude Lacquaniti et al. (1986)
")
65
Espace des couples moteurs
Minimisation des couples zi générés à chaque articulation

66
Minimum variance Bruit dépendant du signal (signal dependent noise SDN)
")
67
Plan Modélisation bayésienne de la perception
Introduction à la perception multi- Perception visuo-haptique (Ernst & Banks, 02) Perception visuo-acoustique des voyelles Questions ouvertes Modélisation bayésienne de l’action Introduction au contrôle moteur Modèle de minimum variance Modélisation de la perception et de l’action: boucles sensorimotrices Exemple : modélisation de l’écriture
 Perception visuo-acoustique des voyelles. Questions ouvertes. Modélisation bayésienne de l’action. Introduction au contrôle moteur. Modèle de minimum variance. Modélisation de la perception et de l’action: boucles sensorimotrices. Exemple : modélisation de l’écriture.")
68
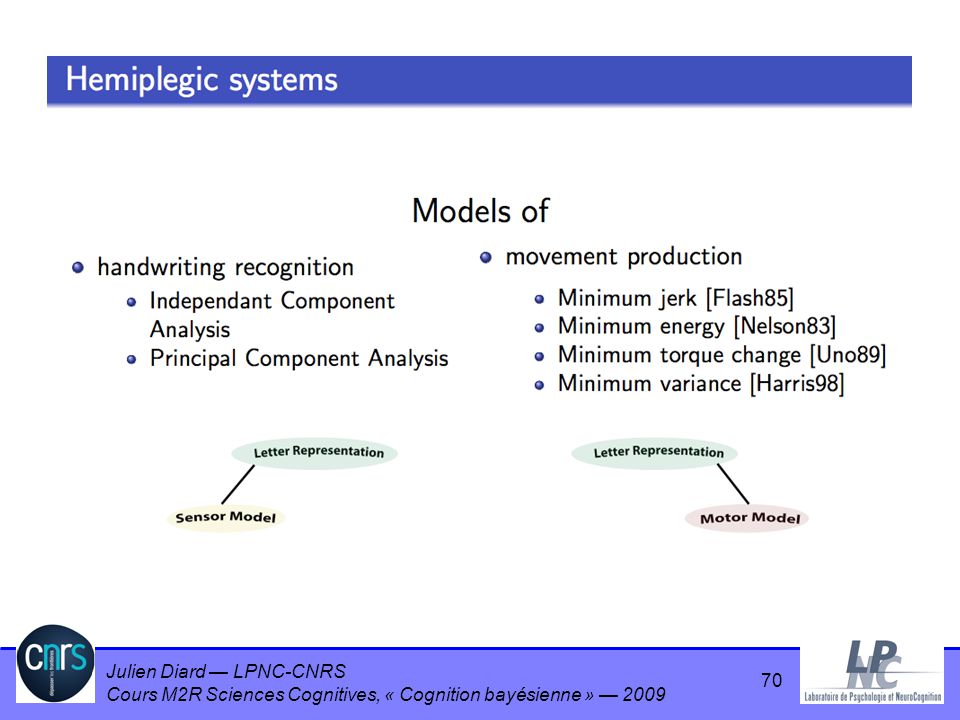
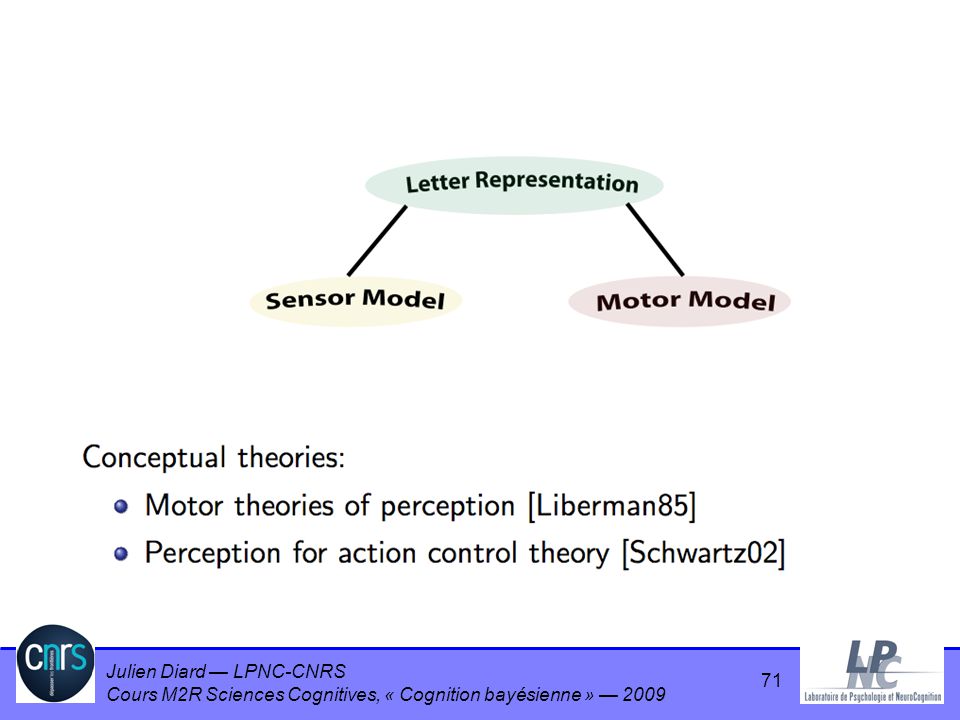
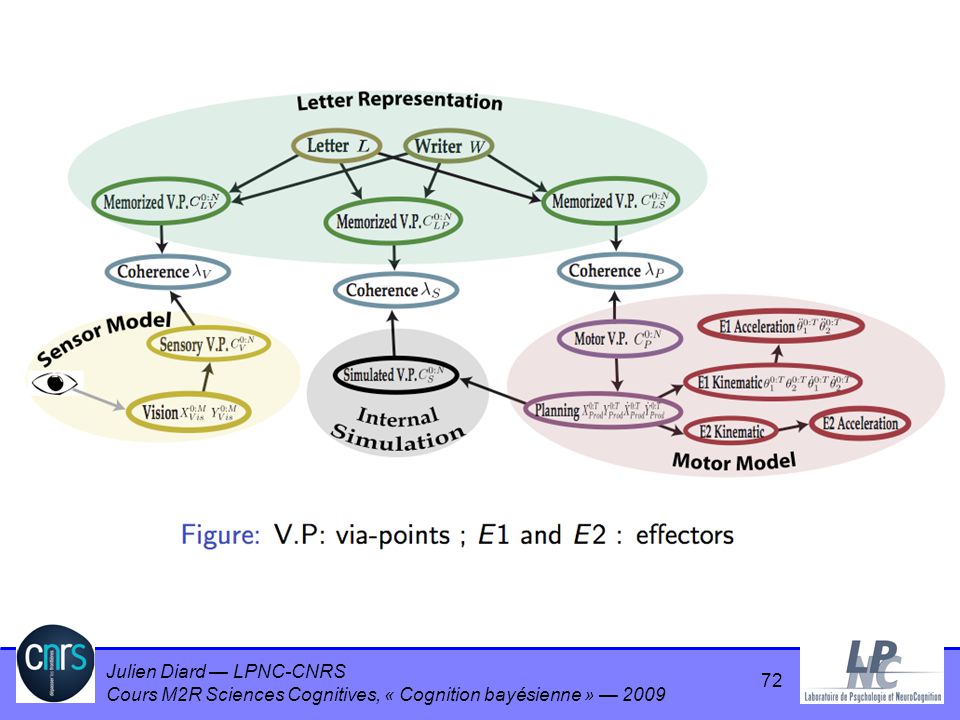
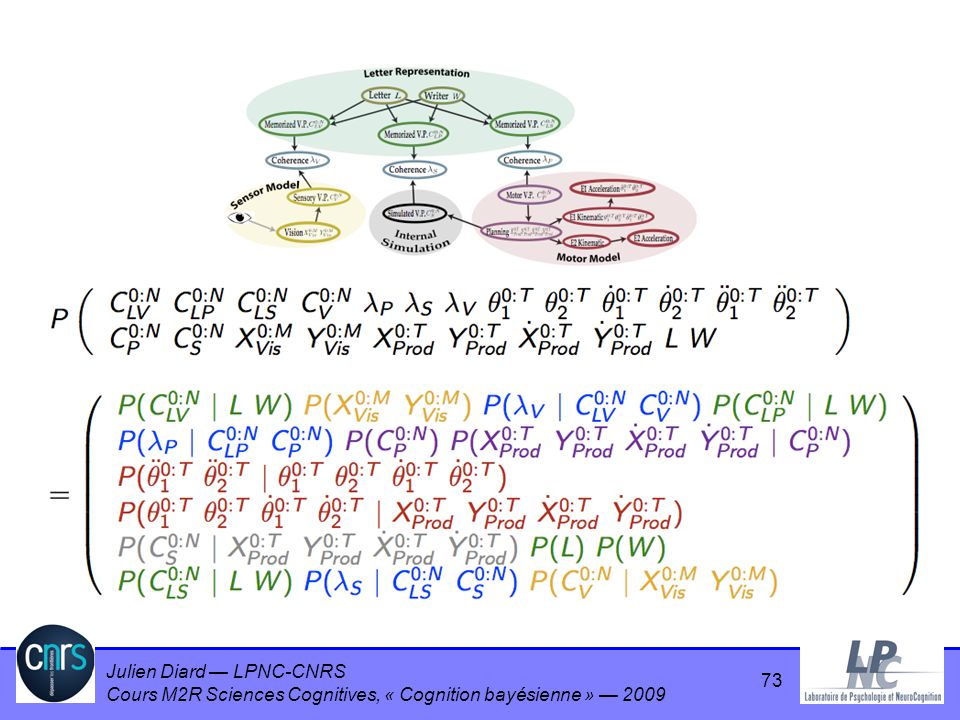
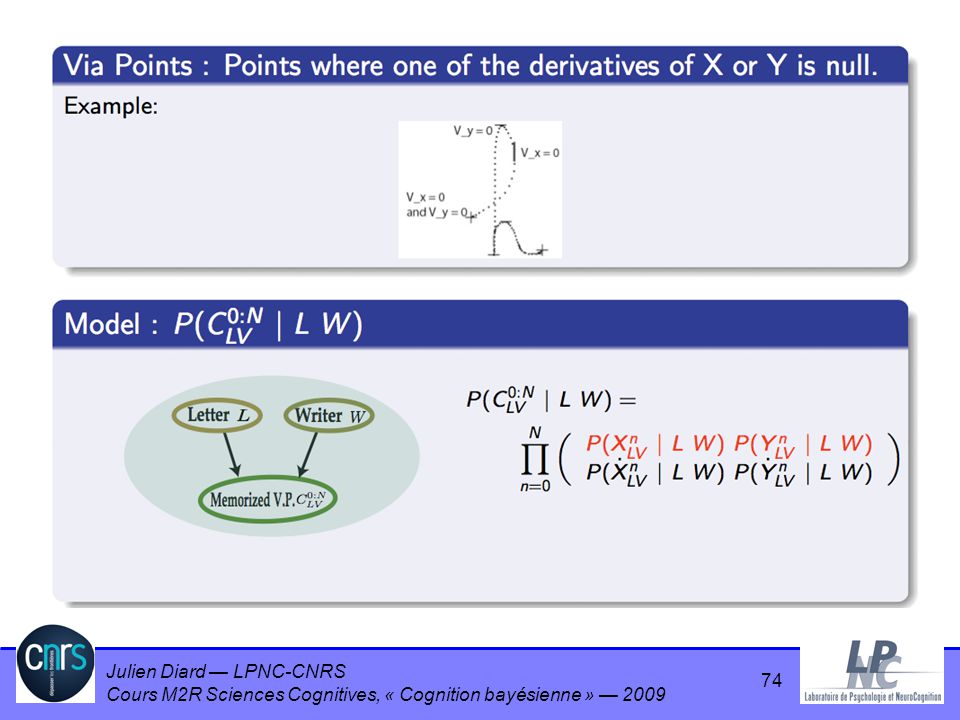
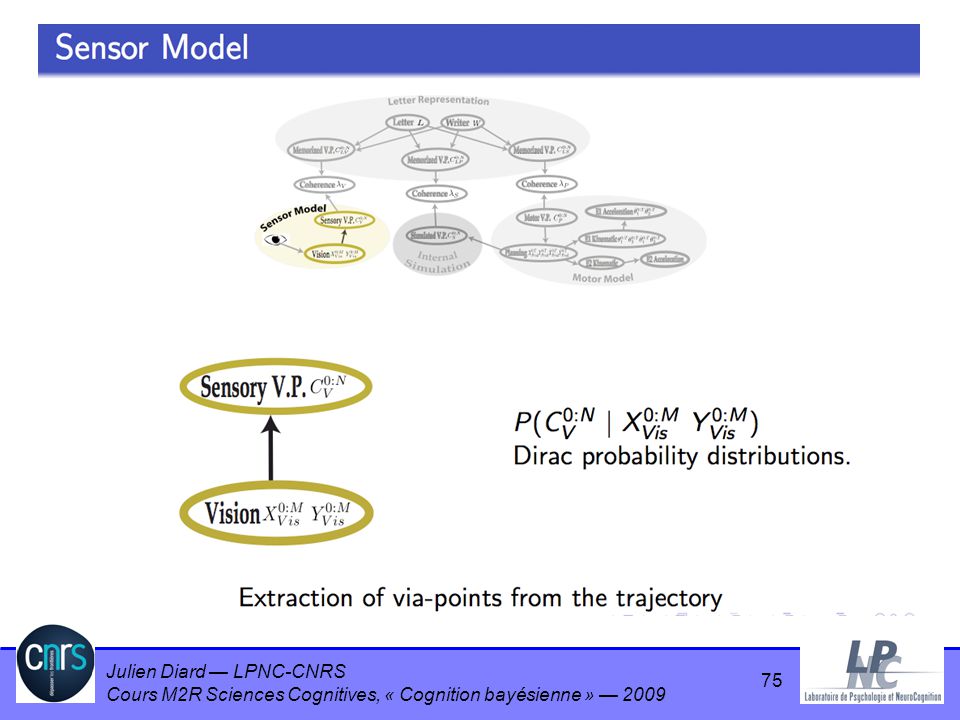
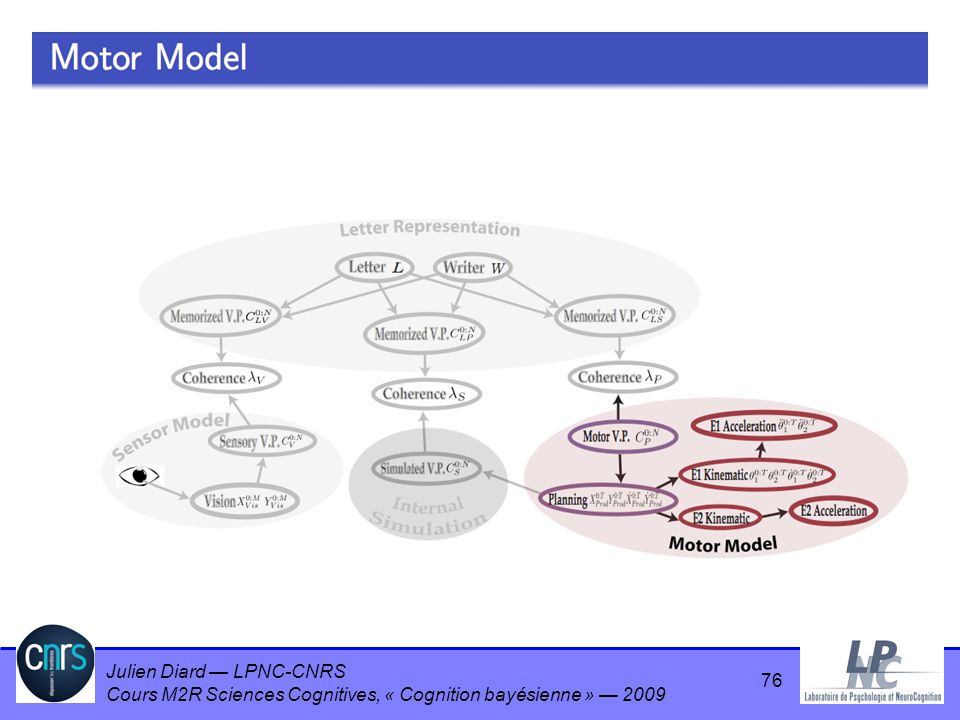
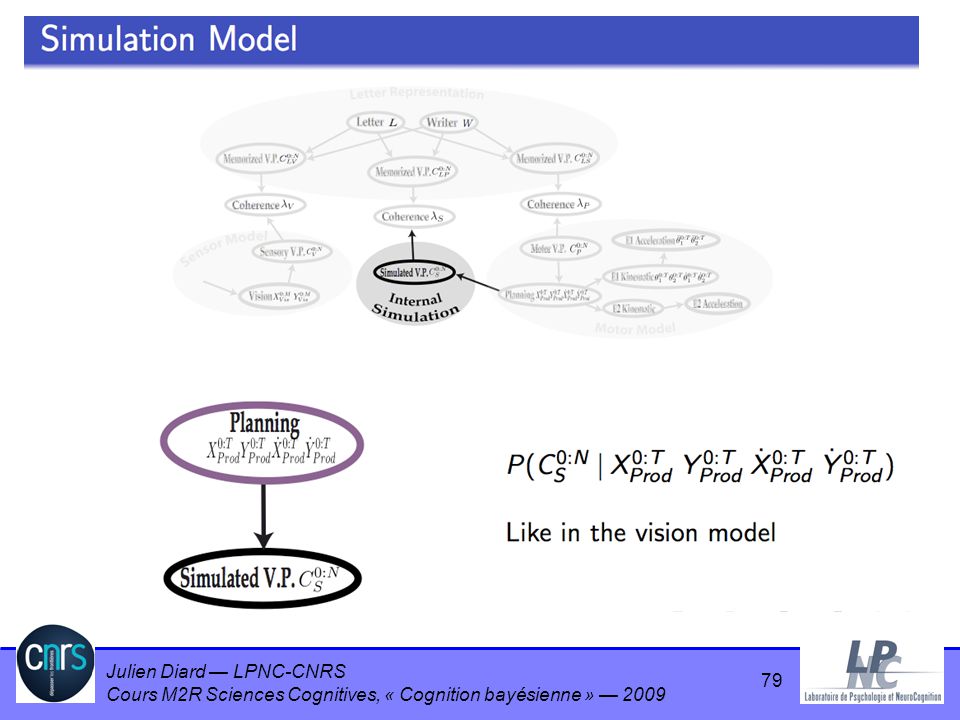
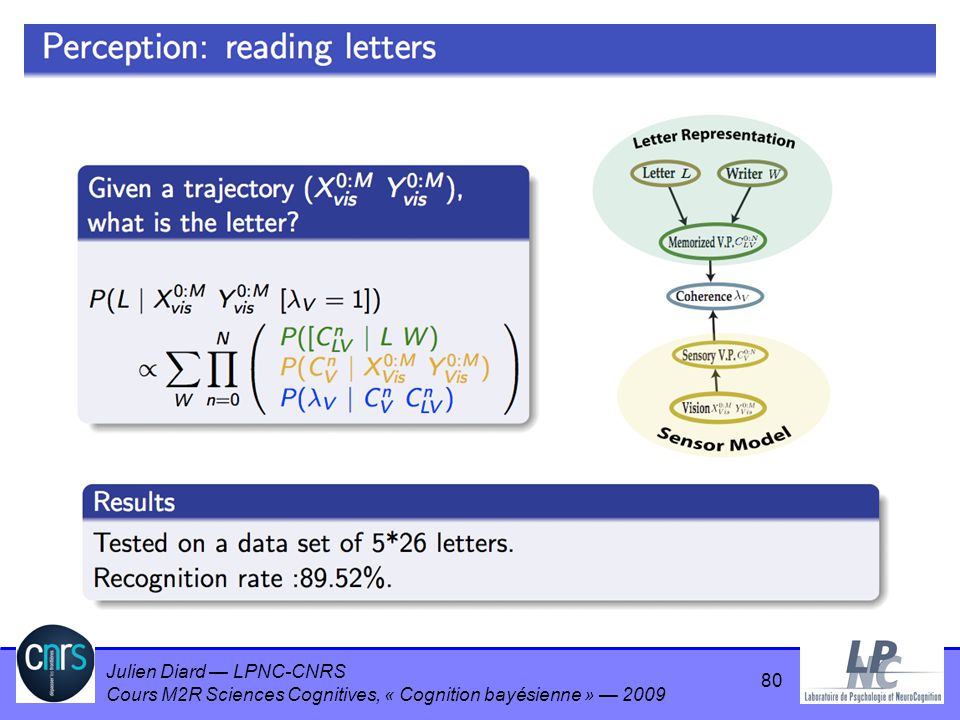
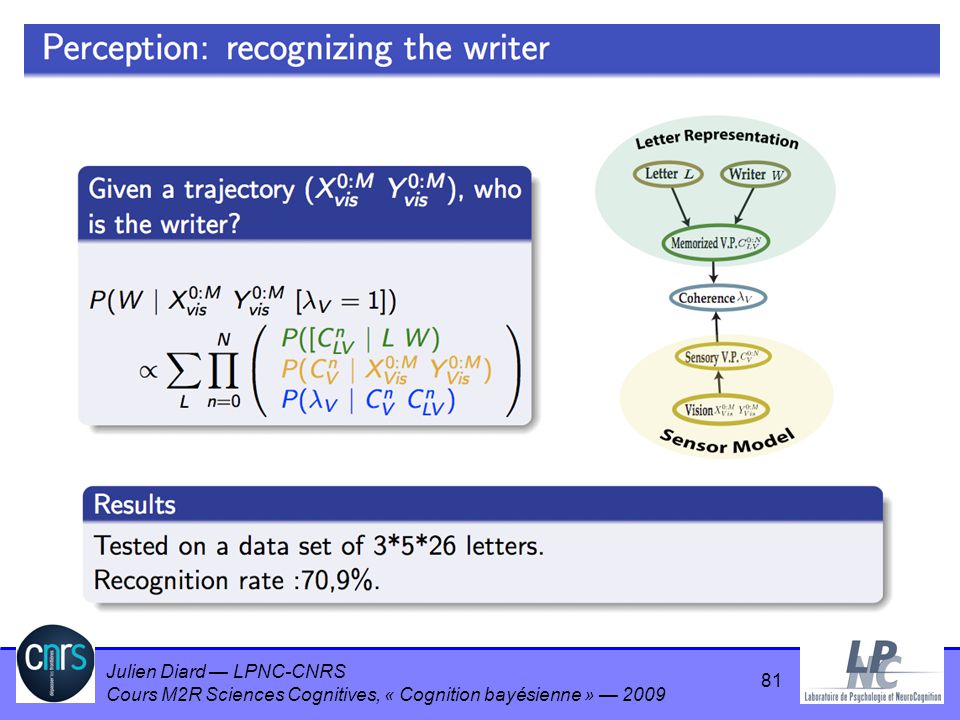
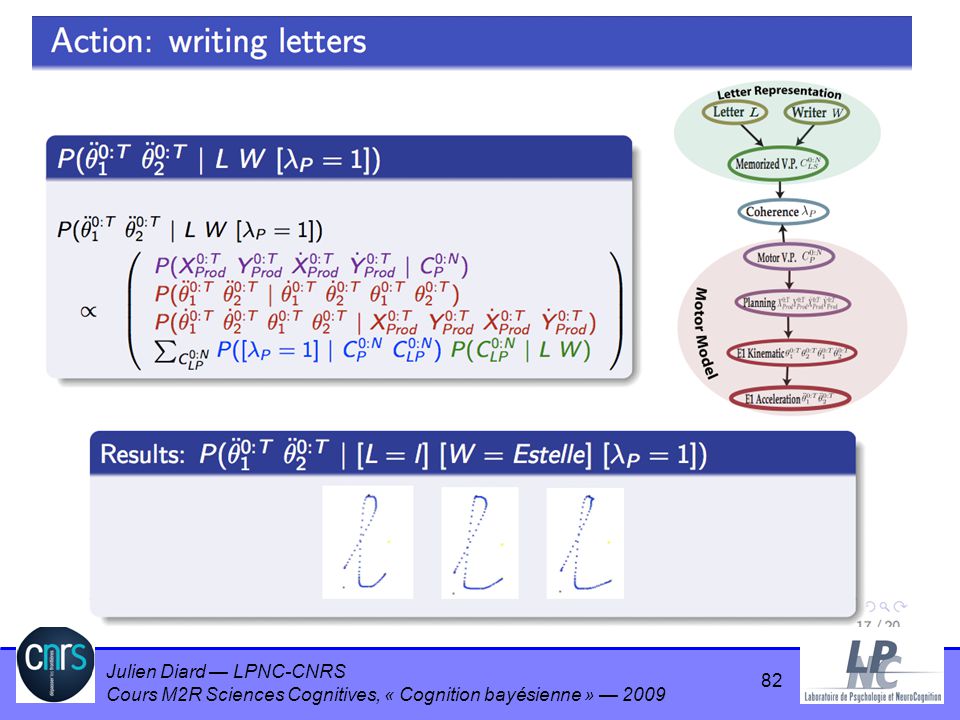
Modélisation bayésienne d’une boucle sensorimotrice : application à l’écriture

69
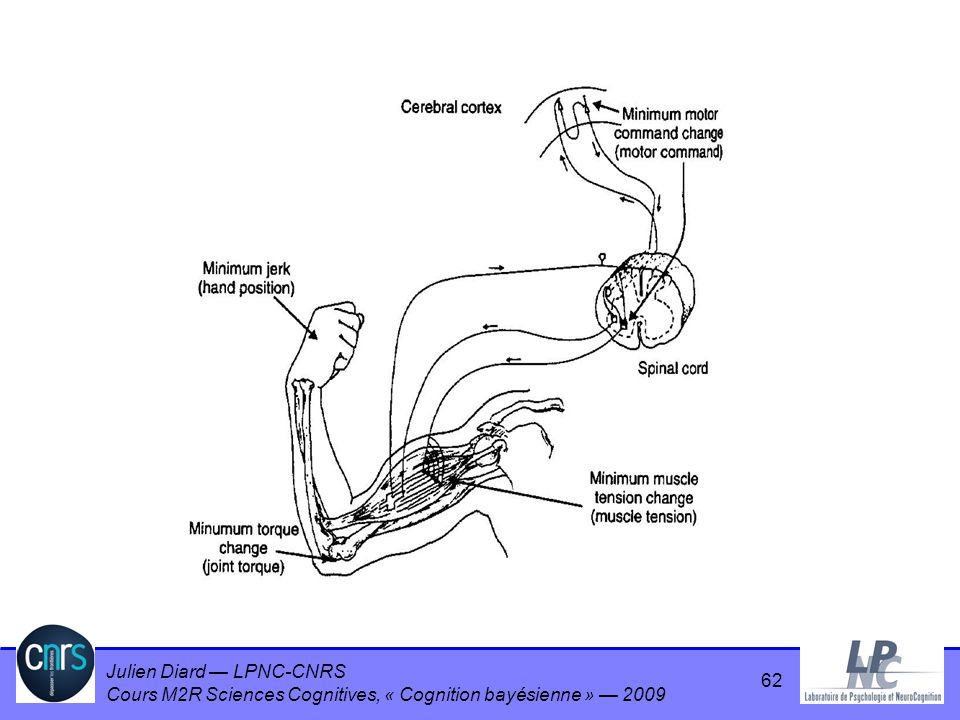
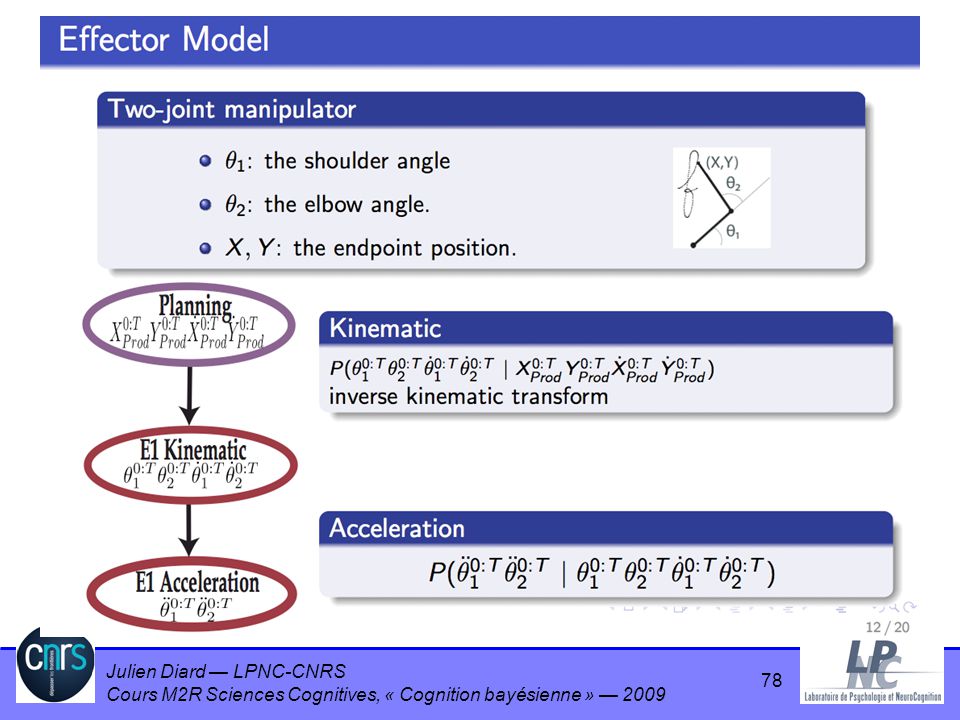
Equivalence motrice

84
Plan Modélisation bayésienne de la perception
Introduction à la perception multi- Perception visuo-haptique (Ernst & Banks, 02) Perception visuo-acoustique des voyelles Questions ouvertes Modélisation bayésienne de l’action Introduction au contrôle moteur Modèle de minimum variance Modélisation de la perception et de l’action: boucles sensorimotrices Exemple : modélisation de l’écriture
 Perception visuo-acoustique des voyelles. Questions ouvertes. Modélisation bayésienne de l’action. Introduction au contrôle moteur. Modèle de minimum variance. Modélisation de la perception et de l’action: boucles sensorimotrices. Exemple : modélisation de l’écriture.")
85
Questions ouvertes Modélisation bayésienne de boucles sensorimotrices
Vraiment ?

86
Boucle ouverte force State change Motor commands muscles Body part

87
Measured sensory consequences
Motor commands force State change muscles Body part Integration Sensory system Proprioception Vision Audition Measured sensory consequences Vitesse Tps Boucle fermée

88
Measured sensory consequences
Motor commands force State change muscles Body part Integration Sensory system Proprioception Vision Audition Measured sensory consequences 100 ms 40 ms ??? 88

89
What we sense depends on what we predicted
force State change Motor commands muscles Body part Integration Belief Sensory system Proprioception Vision Audition Measured sensory consequences Predicted sensory consequences Forward model What we sense depends on what we predicted

90
Expérience de saisie Expérience d’auto chatouillage

91
Modélisation d’une boucle sensorimotrice
Apprentissage = passage d’une boucle fermée à une boucle ouverte ?

92
Une boucle vs. des boucles
Hiérarchie de boucles Constantes de temps Apprentissage hiérarchique

93
Merci de votre attention !
Questions ?

Présentations similaires