Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
III. La mécanique de Newton
Chapitre 1. La cinématique

2
La cinématique la cinématique est l’étude du mouvement indépendamment des causes qui le provoquent

3
Le système mécanique Le système mécanique est le corps ou l’ensemble des corps dont on étudie le mouvement on va supposer dans ce cours que tout système mécanique peut être réduit à un point ( son centre d’inertie)
")
4
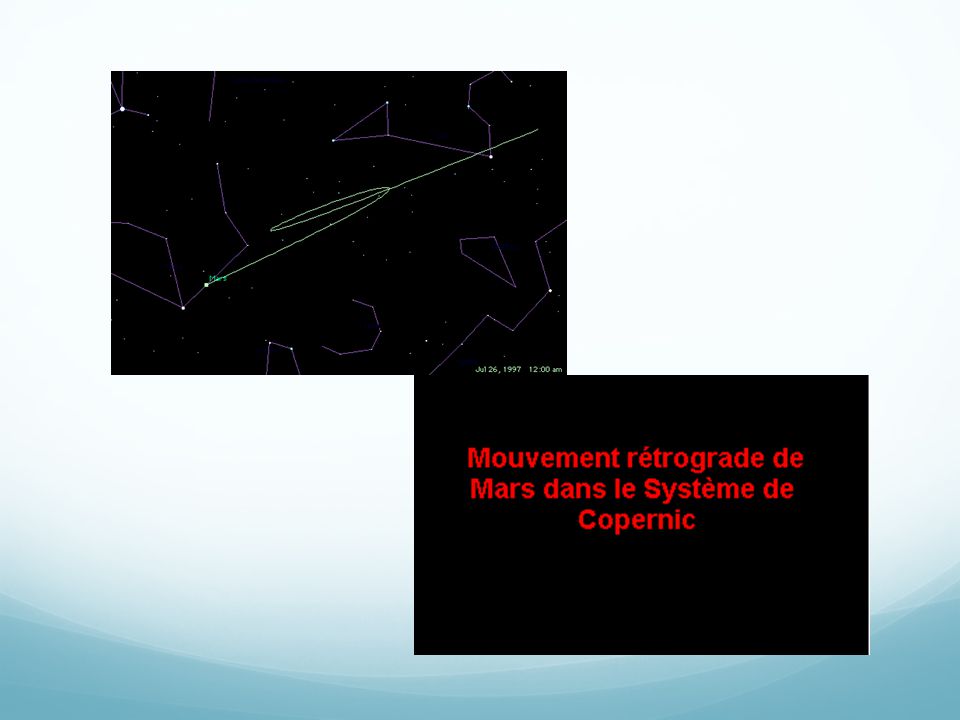
Exemple : le mouvement de Mars
Vu du Soleil Vu de la Terre

6
Référentiel le mouvement d’un corps doit être toujours décrit par rapport à un référentiel référentiel = repère d’espace + repère de temps (horloge)
")
7
La trajectoire l’ensemble des points occupés par le système mécanique pendant son mouvement représente sa trajectoire

8
Le vecteur de position donne la position du point sur sa trajectoire à chaque instant t

9
Le vecteur vitesse instantanée
est égal à la dérivée par rapport au temps du vecteur de position

10
Les caractéristiques du vecteur vitesse
direction : tangent à la trajectoire sens : sens du mouvement norme : mesurée en m/s

11
Construction du vecteur vitesse v1 au point M1
On calcule v1: On trace le vecteur v1 selon la tangente à la trajectoire parallèle à la droite M0M2. Echelle: 1 cm -> 0,10 m.s-1 Ici v1 mesure 7,5 cm M3 On mesure M0M1: M0M2 = 6,0 cm M2 v1 M1 Mo

12
Vecteur accélération instantanée
C’est la dérivée par rapport au temps du vecteur vitesse

13
Caractéristiques du vecteur accélération
Direction : orienté vers l’intérieur de la trajectoire Norme : se mesure en m/s2

14
Construction du vecteur accélération a2 au point M2
Enregistrement n°1 Construction du vecteur accélération a2 au point M2 On reporte les vecteur v3 et – v1 au point M2 On calcule Δv avec l’échelle des vitesses On calcule On trace le vecteur a2 avec une échelle des accélérations a2 On trace le vecteur Δv = v3 – v1 au point M2 v3 v3 M3 On trace le vecteur v3 au point M3 Δv M2 v1 M1 Mo On trace le vecteur v1 au point M1 -v1

15
Mouvements particuliers 1. Le mouvement rectiligne
La trajectoire est une droite Cas particuliers: Mouvement rectiligne uniforme ( v = constant ) Mouvement rectiligne uniformément varié ( v – variable, a = constante)
 Mouvement rectiligne uniformément varié ( v – variable, a = constante)")
16
Applications : On connaît les équations horaires de 5 mouvements :
x(t) = 5, x(t) = 5t, x(t) = 5t2, x(t)= 5t2 - 3t + 2 Déterminer la vitesse, l’accélération et décrire le type de mouvement pour chaque cas.
 = 5, x(t) = 5t, x(t) = 5t2, x(t)= 5t2 - 3t + 2. Déterminer la vitesse, l’accélération et décrire le type de mouvement pour chaque cas.")
17
Mouvements particuliers 2. Le mouvement parabolique
La trajectoire est une parabole Application (TP Dynamique) L’analyse du mouvement de chute parabolique d’une balle de tennis fournit les équations horaire suivantes : x(t) = 1,44 t y(t) = - 5,5 t2 + 2,43 t A partir de ces équations, caractériser le mouvement de la balle.
 L’analyse du mouvement de chute parabolique d’une balle de tennis fournit les équations horaire suivantes : x(t) = 1,44 t. y(t) = - 5,5 t2 + 2,43 t. A partir de ces équations, caractériser le mouvement de la balle.")
18
Mouvements particuliers 3. Le mouvement circulaire
La trajectoire est un cercle Description du mouvement : le repère de Frénet Le vecteur vitesse: Tangent à la trajectoire Le vecteur accélération : Cas d’un mouvement circulaire et uniforme ( v = constante )
")
19
Application:

Présentations similaires
 Trajectoire d’un mobile>")










>")







