Download presentation
1
PRINCIPE GENERAL UTILITE DU SCANNER
Le scanner permet de visualiser tous les éléments difficilement accessibles aux autres modalités , en se basant sur la densité des organes. Il est particulièrement utile pour le contenu de l’abdomen et du thorax. On utilise souvent des produits de contraste iodé par injection intra veineuse.

2
PRINCIPE GENERAL Le scanner X ,scanographe , tomodensitomètre axial (TDM) , En Anglais « Computarized Tomography est apparu a la fin des années soixante Il utilise les rayons X pour fonctionner tout comme la radiographie Radiologie conventionnelle = superposition des structures volumiques dans un plan = 2 dimensions Scanner = coupes axiales excellente résolution en contraste = détection de petits changements dans la structure tissulaire

3
GEOMETRIE 100 110 CM longue Mas augmente Force centrifuge augmente
Effet de cône diminue GEOMETRIE 90 95 CM courte Mas Diminue Force centrifuge diminue Efet de cône augmente

4
GENERATEUR Puissance de sortie maximale environ 80 K watts
Courant de haute fréquence Alimentation du tube avec un taux d’ondulation très faible = KV et MAS très stable Capacité générale tous constructeur De 40 à 600 milliampères De 90 à kilovolts Puissance de sortie = KV X Ma Puissance de sortie maximale environ 80 K watts

5
TUBE RAYONS X Très performant, il doit
Absorber de fortes contraintes thermique = capacité thermique importante Se mesure en Unité de chaleur, un tube doit pouvoir absorber une quantité de chaleur d’environ 8 M.u.c Être capable d’évacuer la chaleur absorbé = Dissipation thermique importante ( En unité de chaleur par minute env K.U.C / Mn ) Il doit supporter les contraintes mécaniques de la force centrifuge. Actuellement 3 tours par seconde soit 0,33 seconde par tour soit en géométrie courte 8 G voire 12 G en géométrie longue
 Il doit supporter les contraintes mécaniques de la force centrifuge. Actuellement 3 tours par seconde soit 0,33 seconde par tour soit en. géométrie courte 8 G voire 12 G en géométrie longue.")
6
COLLIMATION DU FAISCEAU
tube Lame de plomb Passage des X 2 1 largeur du champ 2 épaisseur de spire Collimateur primaire 1 Mâchoires patient COLLIMATION PRIMAIRE Limite l’irradiation inutile Détermine l’épaisseur de spire et le champs d’acquisition

7
COLLIMATION DU FAISCEAU
Lame de plomb tube Collimation secondaire Arrête le rayonnement diffuse produit par le Patient en dehors du faisceau primaire Collimateur primaire Doit être parfaitement aligne sur la collimation primaire patient Collimateur secondaire détecteur

8
DETECTEURS (principe général)
Rôle des détecteurs Capter les photons X a la sortie du patient (Image radiante X) Transformer l’information en signal électrique (convertisseur analogique numérique)
 Transformer l’information en signal électrique (convertisseur analogique numérique)")
9
DETECTEURS (principe général)
Deux types de détecteurs: Détecteurs solides (les plus fréquents) Détecteur a chambre d’ionisation (de plus en plus rare car mauvais rendement)
 Détecteur a chambre d’ionisation. (de plus en plus rare car mauvais rendement)")
10
DETECTEURS (principe général)
Effet photo électrique Lumière Photo cathode Électrons Amplificateur du flux d’électrons C.A.N

11
DETECTEURS (principe général)
Z Détecteur multi barrettes asymétrique 5 2.5 8 barrettes de détecteurs (de largeur différentes) 1.5 1 20 mm 1 1.5 2.5 5 672 éléments de détection par barrettes en X X 5376 éléments au total Y
 mm éléments de. détection par barrettes en X. X éléments au total. Y.")
12
DETECTEURS (principe général)
Y Détecteur multi barrettes asymétrique Respect de la conicité du faisceau 5 2.5 1.5 1 1 1.5 2.5 5 Z X

13
DETECTEURS (principe général)
La conicité du faisceau reste le principal facteur Limitant la largeur du détecteur Y Faisceau perpendiculaire sur les barrettes centrales Faisceau oblique sur les barrettes externes Baisse de la qualité De l’image en périphérie 5 2.5 1.5 1 1 1.5 2.5 5 Z X

14
DETECTEURS (principe général)
Épaisseur de spire 2 mm ppdv 1 mm Épaisseur de spire 5 mm ppdv 2.5 mm 5 2.5 1.5 1 1 1.5 2.5 Épaisseur de spire 10 mm ppdv 2.5 mm 5 Épaisseur de spire 20 mm ppdv 5 mm

15
DETECTEURS (principe général)
Détecteur multi barrettes symétrique (Les plus utilisés) 16 barrettes éléments 4x1.25 mm 16x0.625 mm 4x1.25 mm 10 mm ppdv 0.625 20 mm ppdv 1.25 8x1.25 mm 32x mm 8x1.25 mm 32 barrettes éléments 20 mm ppdv 0.625 40 mm ppdv 1.25 64x mm 64 barrettes éléments 16x1.25 mm 16x1.25 mm 40 mm ppdv 0.625 80 mm ppdv 1.25
 16 barrettes éléments. 4x1.25 mm. 16x0.625 mm. 4x1.25 mm. 10 mm ppdv mm ppdv x1.25 mm. 32x mm. 8x1.25 mm. 32 barrettes éléments. 20 mm ppdv mm ppdv x mm. 64 barrettes éléments. 16x1.25 mm. 16x1.25 mm. 40 mm ppdv mm ppdv")
16
DETECTEURS (principe général)
z 912 éléments 4x1.25 mm 10 mm 16x0.625 mm 20 mm 4x1.25 mm y x éléments

17
DETECTEURS (principe général)
z 912 éléments 8 x1.25 mm 20 mm 32 x0.625 mm 40 mm 8 x1.25 mm y x éléments

18
DETECTEURS (principe général)
z 912 éléments 16x1.25 mm 40 mm 64x0.625 mm 80 mm 16x1.25 mm y x éléments

19
MODE D’ACQUISITION Mode radio Mode hélicoïdale Non systématique
Repérage positionnement des coupes d’examen L’ensemble tube détecteur reste immobile pendant l’acquisition seule le lit avance Mode de face tube au dessus Mode radio profil tube sur le cote Mode hélicoïdale Rapidité d’acquisition L’ensemble tube détecteur continue de tourner alors que le lit avance Le faisceau décrit une hélice autours du patient Acquisition d’un volume

20
ACQUISITION HELICOIDALE
Le volume acquit est définie par: Un point de départ et d’arrivée( point supérieur et inférieur par apport au zéro (centrage) L’ouverture du faisceau selon Z Largeur de spire Le «pitch» ou pas de l’hélice
 L’ouverture du faisceau selon Z. Largeur de spire. Le «pitch» ou pas de l’hélice.")
21
ACQUISITION HELICOIDALE
Avancée du lit Pitch (collimation) = Au cours d’une rotation Épaisseur de spire (une ou plusieurs coupes) Exemple avec 10 mm épaisseur de spire Avancée du lit = 5 mm Pitch = 0.5 Avancée du lit = 10 mm Pitch = 1 Avancée du lit = 20 mm Pitch = 2
 = Au cours. d’une rotation. Épaisseur de spire. (une ou plusieurs coupes) Exemple avec 10 mm épaisseur de spire. Avancée du lit = 5 mm Pitch = 0.5. Avancée du lit = 10 mm Pitch = 1. Avancée du lit = 20 mm Pitch = 2.")
22
ACQUISITION HELICOIDALE
Avancée du lit X Au cours d’une rotation Nombre de coupe Pitch (detection) = Épaisseur de spire Exemple avec 4 coupes dans 10 mm épaisseur de spire Avancée du lit = 5 mm Pitch = 2 Avancée du lit = 10 mm Pitch = 4 Avancée du lit = 20 mm Pitch = 8
 = Épaisseur de spire. Exemple avec 4 coupes dans 10 mm épaisseur de spire. Avancée du lit = 5 mm Pitch = 2. Avancée du lit = 10 mm Pitch = 4. Avancée du lit = 20 mm Pitch = 8.")
23
ACQUISITION HELICOIDALE
Quelle que soit la valeurs du pitch ,toutes les régions du volume balayé sont acquises (Même si pitch > 1et donc spires non jointives)
")
24
ACQUISITION HELICOIDALE
pitch > 1 spires espacées Peu de mesure dans le volume(peu de signal et reconstruction de mauvaise qualité) Mais peu de rotations à effectuer pour couvrir un volume donné (temps d’acquisition faible et faible irradiation du patient)
 Mais peu de rotations à effectuer pour couvrir un volume donné (temps d’acquisition faible et faible irradiation du patient)")
25
ACQUISITION HELICOIDALE
pitch < 1 spires chevauchées Beaucoup de mesure dans le volume(Beaucoup de signal et reconstruction de bonne qualité) Mais Beaucoup de rotations à effectuer pour couvrir un volume donné (temps d’acquisition élevé et irradiation du patient +++++)
 Mais Beaucoup de rotations à effectuer pour couvrir un volume donné (temps d’acquisition élevé et irradiation du patient +++++)")
26
PARAMETRE D’ACQUISITION
Kilo voltage Ampérage et temps d’acquisition Champ d’acquisition Epaisseur de spire Pitch

27
KILO VOLTAGE Acquisition à haute tension: 80 à 140 KV
(DDP au borne du tube) Privilégier l’effet Compton dans le patient (Diffusion des photons X avec ou sans changement de direction) Limiter l’effet photo électrique ( absorption total des photons X)
 Privilégier l’effet Compton dans le patient. (Diffusion des photons X avec ou sans changement de direction) Limiter l’effet photo électrique ( absorption total des photons X)")
28
KILO VOLTAGE Rayonnement diffusé avec changement de direction:
Arrêté en partie par les septas des détecteurs S’il interagit avec le détecteur: flou de diffusion Arrêté en bord de champ par le collimateur secondaire X

29
KILOVOLTAGE Rayonnement diffusé sans changement de direction:
Photons X absorbé par les détecteurs Participe avec le rayonnement transmis ( qui n’a subit aucune interaction)à la formation du signal X
à la formation du signal. X.")
30
KILO VOLTAGE Si effet photoélectrique trop présent (KV trop faible):
Elément anatomiques à densités élevées non mesurés car le faisceau émergeant est trop faible (trop de photons absorbé par le patient) Erreur de reconstruction et rapport signal / bruit faible ( osteo-articulaire :haut kilo voltage contrairement à la radiologie conventionnelle)
 Erreur de reconstruction et rapport signal / bruit faible. ( osteo-articulaire :haut kilo voltage contrairement à la radiologie conventionnelle)")
31
AMPERAGE ET TEMPS D’ACQUISITION
Ampérage:courant de chauffage du filament du tube (de 10 à 500 ma Temps d’acquisition: Durée de rotation (de 1 à 0,4 seconde mAs Nombre de photons X produits Quantité de signal mAs

32
AMPERAGE ET TEMPS D’ACQUISITION
mAs choisi en fonction De la nature du segment à scannériser De la taille de la matrice De la dimension du champs d’acquisition De l’épaisseur de coupe

33
EPAISSEUR DE SPIRE 1 Largeur du champ d’acquisition
tube Collimateur primaire 1 2 Y Vue ascendante patient Z En acquisition mono barrette Ouverture selon Z= épaisseur de coupe X En acquisition multi barrettes Ouverture selon Z= épaisseur de spire= X coupe 1 Largeur du champ d’acquisition 2 Epaisseur de spire

34
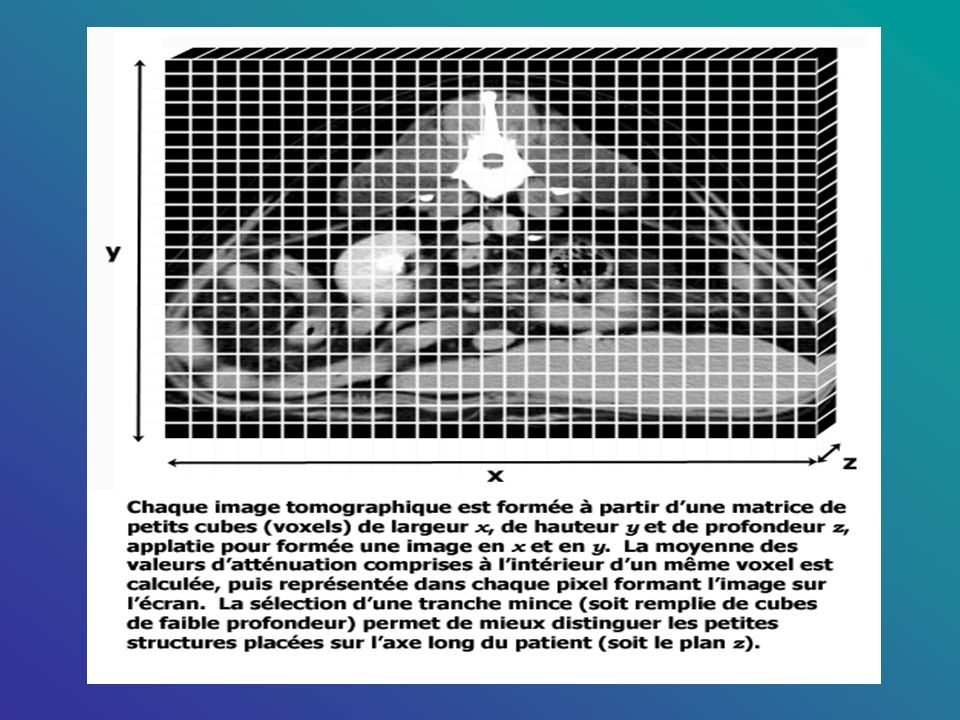
EPAISSEUR DE COUPE Elle représente la profondeur du voxel (épaisseur de la «tranche anatomique » scannériser Elle est choisie en fonction: Du contexte clinique(taille de la lésion à chercher) De la taille du segment à étudier De la quantité de signal souhaité Elle joue un rôle important sur la résolution spatial Elle est a l’origine de l’effet de volume partielle voxel Epaisseur de coupe
 De la taille du segment à étudier. De la quantité de signal souhaité. Elle joue un rôle important sur la résolution spatial. Elle est a l’origine de l’effet de volume partielle. voxel. Epaisseur de coupe.")
35
EPAISSEUR DE COUPE effet de volume partiel
C’est la représentation dans la « tranche à scannerisé » de deux structures anatomiques de densités différentes contenues dans le même voxel A la visualisation en pixels, les densités de ces deux structures sont moyennées en une seule qui n’a pas de correspondance anatomique

36
EPAISSEUR DE COUPE effet de volume partiel
Réduction de l’épaisseur de coupes

37
EPAISSEUR DE COUPE effet de volume partiel
Reconstruction en coupes chevauchées

38
PARAMETRES DE RECONSTRUCTION
En acquisition hélicoïdal, il faut différencier les paramètres d’acquisition et les paramètres de reconstruction Paramètres d‘acquisition: définissent la quantité et la qualité des données brutes du volume exploré Paramètres de reconstruction: définissent la visualisation des données brutes du volume exploré (modifications possibles après acquisition) A savoir 1) Champ de reconstruction 2) Epaisseur de coupe 3) Espace inter coupe 4) Filtre de reconstruction 5) Matrice
 A savoir. 1) Champ de reconstruction. 2) Epaisseur de coupe. 3) Espace inter coupe. 4) Filtre de reconstruction. 5) Matrice.")
39
CHAMP DE RECONSTRUCTION
Les images peuvent être reconstruites avec un champ plus petit que le champ d’acquisition Interpolation des caractéristiques de l’image(résolution spatiale,résolution en densité,rapport signal sur bruit) comme si les données brutes avaient été acquises avec la taille du champ de reconstruction Mais les « vraies » caractéristiques de l’image restent spécifiques à la taille du champ d’acquisition
 comme si les données brutes avaient été acquises avec la taille du champ de reconstruction. Mais les « vraies » caractéristiques de l’image. restent spécifiques à la taille du champ d’acquisition.")
40
CHAMP DE RECONSTRUCTION
FOV 400 FOV 150 Dt 50 S 200 S 50 I 150 I 200

41
EPAISSEUR DE COUPE Les images peuvent être reconstruites avec des épaisseurs de coupes différentes Interpolation des caractéristiques d’image (résolution spatiale, résolution en densité,rapport signal sur bruit) Mais les « vraies » caractéristiques de l’image restent spécifiques à l’épaisseur de coupe d’acquisition
 Mais les « vraies » caractéristiques de l’image. restent spécifiques à l’épaisseur de coupe d’acquisition.")
42
EPAISSEUR DE COUPE Epaisseur de spire de 10 MM Détecteur 20X 0,5 MM

43
EPAISSEUR DE COUPE Exemple: 20 coupes de 0,5 MM

44
Si In supérieur a l’épaisseur de coupe coupes espacées
INCREMENTATION C’est l’espace entre le milieu de chaque coupe reconstruite In Si In supérieur a l’épaisseur de coupe coupes espacées Si In inférieur a l’épaisseur de coupe coupes chevauchées

45
INCREMENTATION In In

46
INCREMENTATION Epaisseur 0,5 MM Epaisseur 0,25 MM Epaisseur 0,5 MM

47
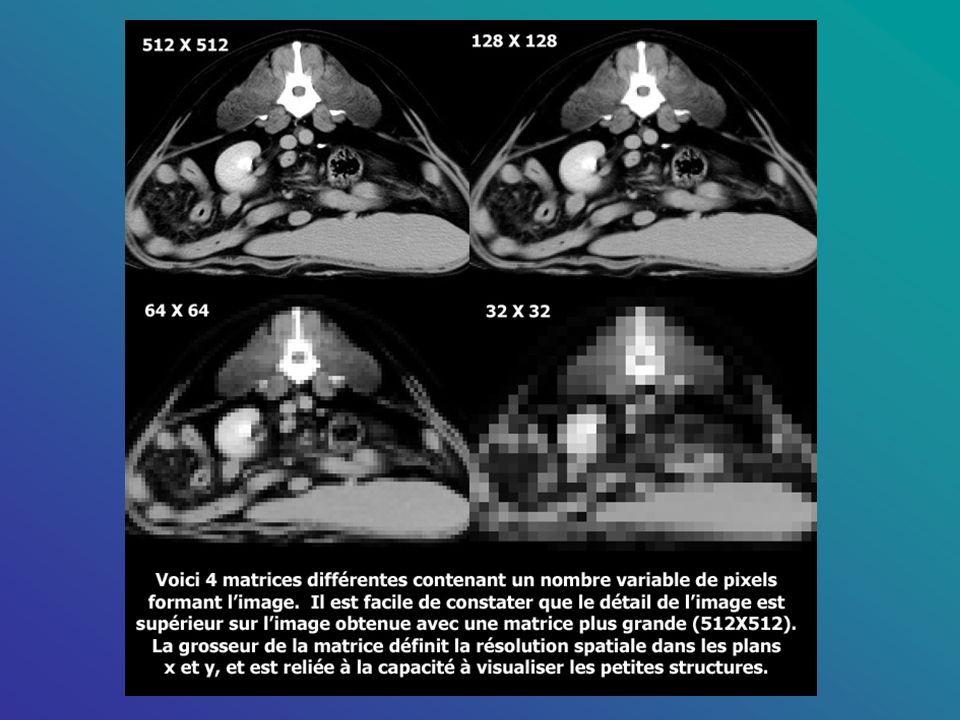
MATRICE Elle est formée de pixels et de voxels, dans lesquelles sont représentés les niveaux de gris correspondant a chaque coefficient d’atténuation calculé Le plus souvent 512X512 Choisie en fonction du contexte clinique et du segment à scannériser Influe (en relation avec la F.OV.) sur la résolution spatiale, la résolution en densité et le rapport signal sur bruit
 sur la résolution spatiale, la résolution en densité et le rapport signal sur bruit.")
50
FILTRE DE RECONSTRUCTION
Introduction à la transformé de FOURIER Image Voie numérique Voie fréquentielle

51
FILTRE DE RECONSTRUCTION
Domaine fréquentielle Domaine temporelle

52
FILTRE DE RECONSTRUCTION
Domaine temporelle Domaine fréquentielle

53
FILTRE DE RECONSTRUCTION
Domaine temporelle Domaine fréquentielle

54
FILTRE DE RECONSTRUCTION
Domaine fréquentielle Domaine temporelle

55
FILTRE DE RECONSTRUCTION
Domaine fréquentielle Domaine temporelle

56
FILTRE DE RECONSTRUCTION

57
FILTRE DE RECONSTRUCTION
Domaine fréquentielle Domaine temporelle

58
FILTRE DE RECONSTRUCTION
Profil d’atténuation Transformée de Fourier Détermination des gammes de fréquences Filtrage de certaines fréquences Images filtrées

59
FILTRE DE RECONSTRUCTION
Il existe différentiels filtres à choisir en fonction de ce que l’on souhaite privilégier en terme de qualité d’image: Filtres spatiaux (dits « durs ») Filtres en densité (dits « mous ») Filtres intermédiaires (dits (standards »)
 Filtres en densité (dits « mous ») Filtres intermédiaires (dits (standards »)")
60
FILTRE DE RECONSTRUCTION
Filtres spatiaux (dits « durs ») Sélection des fréquences élevées Privilégient la représentation des limites anatomiques des structures Résolution spatiale Résolution en densité Pour les structures à contraste naturel élevé (os, parenchyme pulmonaire)
 Sélection des fréquences élevées. Privilégient la représentation des limites anatomiques des structures. Résolution spatiale Résolution en densité. Pour les structures à contraste naturel élevé (os, parenchyme pulmonaire)")
61
FILTRE DE RECONSTRUCTION
Filtres en densité (dits « mous ») Elimination des fréquences élevées Privilégient la discrimination des structures à faible écart densité Résolution en densité résolution spatiale Pour les régions à faible contraste naturel (abdomen, cerveau)
 Elimination des fréquences élevées. Privilégient la discrimination des structures à faible écart densité. Résolution en densité résolution spatiale. Pour les régions à faible contraste naturel (abdomen, cerveau)")
62
FILTRE DE RECONSTRUCTION
Filtres en densité (dits « standard») Compromis entre résolution spatiale et résolution en densité Pour les régions contenant à la fois des structures à fort et faible contraste naturel ( thorax: parenchyme et médiastin, rachis injecté )
 Compromis entre résolution spatiale et résolution en densité. Pour les régions contenant à la fois des structures à fort et faible contraste naturel ( thorax: parenchyme et médiastin, rachis injecté )")
63
QUALITE DE L’IMAGE Les critères qui définissent la qualité de l’image sont La résolution spatiale La résolution en densité La résolution temporelle Le rapport signal sur bruit Les artefacts

64
RESOLUTION SPATIALE C’est la précision de l’information contenue dans le pixel à la visualisation Elle dépends de la taille du voxel et du filtre de reconstruction choisi Trois paramètres déterminent la taille du voxel L’épaisseur de coupe La taille du champs d’acquisition La taille de la matrice
![]()
65
RESOLUTION SPATIALE Pour une même taille de matrice et de champs
Si épaisseur de coupe résolution spatiale Pour une même taille de matrice et d’épaisseur de coupes Si F.O.V résolution spatiale Pour une même taille de champs et d’épaisseur de coupes Taille matrice résolution spatiale

66
RESOLUTION EN DENSITE C’est le pouvoir séparateur, en niveaux de gris, de la matrice (possibilité de différencier deux structures à faible contraste) Elle dépends de la profondeur de numérisation ( nombre de bit de codage de la matrice), de la taille du voxel et du filtre de reconstruction choisi
 Elle dépends de la profondeur de numérisation. ( nombre de bit de codage de la matrice), de la taille du voxel et du filtre de reconstruction choisi.")
67
RESOLUTION TEMPORELLE
C’est le nombre maximum de coupes pouvant être acquises en 1 seconde C’est l’atout majeur des scanners multicanaux grâce à l’augmentation: Du nombre de canaux de réception Bientôt 256 De la vitesse de rotation Jusqu’a trois tours par seconde

68
RESOLUTION TEMPORELLE
Les technologie les plus avancées permettent: 64 coupes de MM 3 coupes par seconde Soit une couverture de 120 MM par seconde Application cardiaque Mouvement du cœur « figé » synchronisation EEG

72
RAPPORT SIGNAL SUR BRUIT
C’est une valeur qui définies le niveau de qualité d’une image S/B qualité image Signal: « Vraies information » Dépends des Mas,du Kv, du voxel, du Pitch action manipulateur possible Bruit: « Fausses information » Constituée principalement du bruit quantique (mauvaise répartition des photons dans le faisceau), du bruit technologique (parasitage du à l’appareillage), du bruit électronique (perturbation dues à la chaîne informatique) Pas d’action possible par le manipulateur
, du bruit technologique (parasitage du à l’appareillage), du bruit électronique (perturbation dues à la chaîne informatique) Pas d’action possible par le manipulateur.")
73
RAPPORT SIGNAL SUR BRUIT
Variation du rapport S/B en fonction des Mas Si nb Mas Photons sur détecteur Beaucoup de signal Rapport S/B augmente mais irradiation du patient Variation du rapport S/B en fonction des Kv Si nb Kv Photons plus pénétrant et flou diffusé

74
RAPPORT SIGNAL SUR BRUIT
Variation du rapport S/B en fonction du pitch Si pitch Données brutes acquises Beaucoup de signal Rapport S/B augmente mais irradiation du patient Variation du rapport S/B en fonction du voxel Plus les voxels sont grands et plus il y a de signal par voxel Rapport S/B augmente mais resolution spatial

75
ARTEFACTS Ce sont des images reconstruites qui n’existent pas dans l’anatomie du patient (discordance entre la densité réelle et la densité reconstruite) Volume partiel Mouvement du patient Sous échantillonnage ( insuffisance de mesure)
 Volume partiel. Mouvement du patient. Sous échantillonnage ( insuffisance de mesure)")














 utilisant les images de Tomodensitométrie (TDM) Guillaume BONNIAUD.>")






