Télécharger la présentation
2
Moteur universel Utilisation de ce type de moteur : Moteur de faible encombrement, couple important, rendement médiocre, création de parasites Exemples : Moteur de perceuse, aspirateur, robot ménager etc...(appareils électroportatifs en général). Comme la polarité de l'induit et de l'inducteur dépendent du sens du courant, si celui-ci s'inverse, les pôles de l'induit et de l'inducteur s'inversent aussi, mais les forces résultantes sont toujours dans le même sens. Un moteur universel peut être alimenté par une fem alternative ou continue.
. Comme la polarité de l induit et de l inducteur dépendent du sens du courant, si celui-ci. s inverse, les pôles de l induit et de l inducteur s inversent aussi, mais les forces. résultantes sont toujours dans le même sens. Un moteur universel peut être alimenté par une fem alternative ou continue.")
3
Le triphasé Le réseau triphasé, est constitué de trois phases, d'un neutre et d'une terre, le tout cadencé à une fréquence de 50Hz. Phase 1 : U = UM sin wt UM = amplitude (w=2p) Phase 2 : V = UM sin (wt - 2p/3) Phase 3 : W = UM sin (wt - 4p/3)
 Phase 2 : V = UM sin (wt - 2p/3) Phase 3 : W = UM sin (wt - 4p/3)")
4
Le neutre Dans tout système triphasé, équilibré de distribution, existe un neutre électrique situé au centre de gravité du triangle équilatéral représentatif des trois phases. La tension entre une des phases et le neutre est appelée tension simple (230V) alors que la tension entre 2 phases est appelée tension composée (400V). Phase 1 : U = UM sin wt Phase 2 : V = UM sin (wt - 2p/3) Phase 3 : W = UM sin (wt - 4p/3) La phase Les phases sont les conducteurs chargés de véhiculer l'énergie vers le récepteur. Dans un récepteur équilibré, le courant circulant dans le neutre est nul, il n'existe que dans les phases. La tension de chaque phase est décalée de 120° degrés les unes par rapport aux autres. Réseau EDF 230/400 230V pour les tensions simples (monophasé) 400V pour les tensions composées (triphasé)
 alors que la tension. entre 2 phases est appelée tension composée (400V). Phase 1 : U = UM sin wt. Phase 2 : V = UM sin (wt - 2p/3) Phase 3 : W = UM sin (wt - 4p/3) La phase. Les phases sont les conducteurs chargés de véhiculer l énergie vers le récepteur. Dans un récepteur équilibré, le courant circulant dans le neutre est nul, il n existe que dans les phases. La tension de chaque phase est décalée de 120° degrés les unes par rapport aux autres. Réseau EDF 230/ V pour les tensions simples (monophasé) 400V pour les tensions composées (triphasé)")
5
Puissance en triphasé La terre
La terre est le fil conducteur assurant une liaison électrique entre le sol et certaines parties de l'installation (carcasse métallique ) de façon à fermer le circuit entre la phase qui touche une des parties de l'installation et la terre. Ceci évite que ce soit un individu, qui touchant une partie métallique de l'installation ne ferme le circuit, car le neutre est relié au départ du transformateur EDF à la terre. Puissance en triphasé Puissance sur des éléments purement résistifs : Puissance sur des éléments introduisant un déphasage j :
 de façon à fermer le circuit entre la phase. qui touche une des parties de l installation et la terre. Ceci évite que ce soit un individu, qui touchant une partie métallique de l installation ne ferme le circuit, car le neutre est. relié au départ du transformateur EDF à la terre. Puissance en triphasé. Puissance sur des éléments purement résistifs : Puissance sur des éléments introduisant un déphasage j :")
6
Une phase U et I U efficace du réseau I efficace sur 1 phase

7
Champ tournant Une bobine parcourue par un courant alternatif crée un champ magnétique alternatif. On vérifie facilement qu'en un point, l'induction alternative d'amplitude b = Bm sin wt est équivalente à deux champs tournant en sens contraires à la vitesse w, chacun d'eux ayant une amplitude égale à Bm/2. Un ensemble de trois bobines identiques, disposées aux trois sommets d'un triangle équilatéral, de manière que leurs axes se trouvent dans le même plan et fassent entre eux un angle de 120°, et parcourues par des courants triphasés, produisent au centre géométrique de l'ensemble un champ tournant à une vitesse égale à la pulsation des courants. Si chaque bobine crée en ce centre un champ d'amplitude Bm, la somme des trois champs est représentée par un vecteur d'une amplitude constante, égale à 3 Bm/2

8
Positif Négatif

9
Positif Négatif

10
Positif Négatif

11
Positif Négatif Etc.…

15
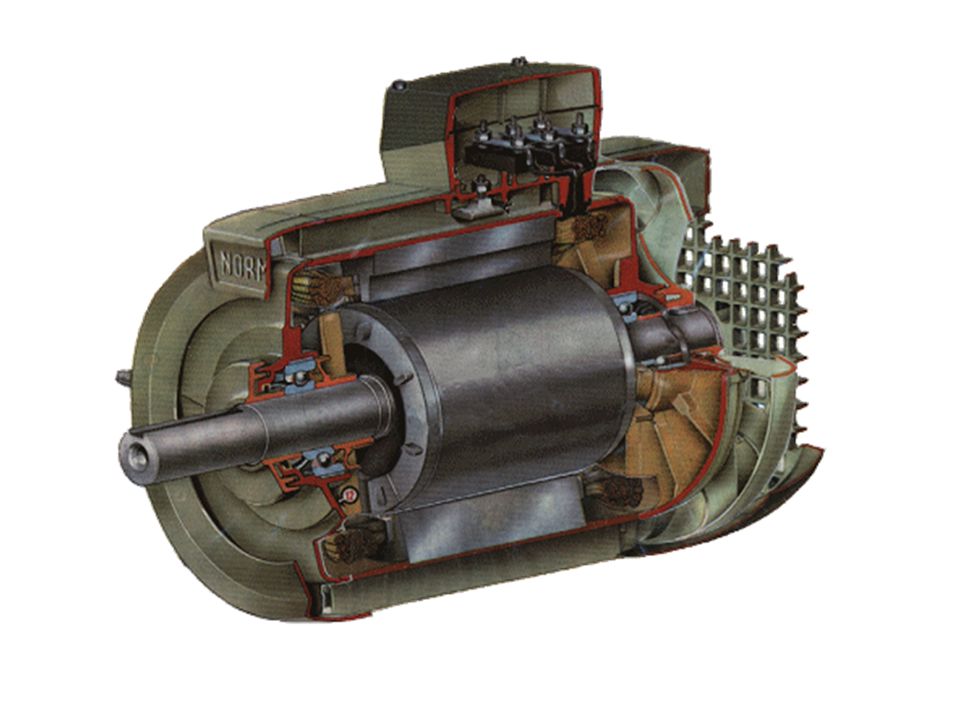
Principe du moteur asynchrone triphasé
3 bobines forment une paire de pôles Une masse métallique (le rotor) est placée au centre des 3 bobines. Le rotor subit l’influence du champ tournant. Loi de Lenz : Le sens du courant induit est tel que, par ses effets, il s’oppose à la cause qui lui donne naissance Le champ tournant induit dans le métal du rotor un courant électrique de très forte intensité. Le courant électrique induit un champ magnétique opposé au champ tournant. Le rotor devenu magnétique va suivre le champ tournant Le rotor va tourner sensiblement à la même vitesse que le champ tournant
 est placée. au centre des 3 bobines. Le rotor subit l’influence du champ tournant. Loi de Lenz : Le sens du courant induit est. tel que, par ses effets, il s’oppose à la cause qui. lui donne naissance. Le champ tournant induit dans le métal du rotor un courant électrique de très forte intensité. Le courant électrique induit un champ magnétique opposé au champ tournant. Le rotor devenu magnétique va suivre le champ tournant. Le rotor va tourner sensiblement à la même vitesse que le champ tournant.")
16
Ce qui donne le nom de moteur asynchrone
Si le moteur tourne en synchronisme avec le champ tournant, la vitesse relative entre le rotor et le champ tournant est NULLE. L’induction ne peut donc pas exister ! Le rotor tourne TOUJOURS moins vite que le champ tournant. De cette façon il est toujours balayé par les champs tournants et se transforme en une pièce magnétique. Ce qui donne le nom de moteur asynchrone Cette différence de vitesse s’appelle le glissement Équations Vitesse de synchronisme (le champ tournant) Glissement en % N, Ns = vitesse en tr.mn-1 P = Nombre de paire de pôles F = fréquence d’alimentation en Hz Le glissement est de l’ordre de 5%
 Glissement en % N, Ns = vitesse en tr.mn-1. P = Nombre de paire de pôles. F = fréquence d’alimentation en Hz. Le glissement est de l’ordre de 5%")
17
Exemples : Un moteur de 2 pôles est alimenté en courant alternatif 50Hz Sa vitesse de synchronisme sera de : 2 pôles = 1 paire de pôles donc Ns = 3000tr.mn-1 Ce même moteur alimenté en 60Hz Ns = 3600tr.mn-1 Un moteur de 4 paires de pôles est alimenté en courant alternatif 50Hz puis en 60Hz Sa vitesse de synchronisme sera de : Avec un glissement de 5% sa vitesse réelle sera de : Ns = 750tr.mn-1 et Ns = 900tr.mn-1 N = 712tr.mn-1 et N = 855tr.mn-1 Un moteur de 1 paire de pôles est alimenté en courant alternatif 50Hz Sa vitesse réelle est de 2910 tr.mn-1 : Quel est son glissement ? Glissement = 3%

18
Couplages

19
Couple M en fonction de la vitesse

20
Courant I en fonction de la vitesse
In courant nominal

21
Courant I en fonction de la vitesse
Mm = 7 à 12 Nm Md = 4 à 7 Nm Mn = 2.38Nm 1.9A w = np/30 = 314rds-1 2800 tr.mn-1 3200 tr.mn-1 M = P/w = 750/314 = 2.38Nm 3000 tr.mn-1

22
Couple résistant Couple constant quelle que soit la vitesse
Engins de levage Bandes transporteuses Laminoirs Pompes à engrenages Compresseurs à pistons Mr=constant Couple résistant proportionnel au carré de la vitesse Ventilateurs Pompes centrifuges agitateurs Mr=K.n2 Couple résistant inversement proportionnel à la vitesse Mr=K . 1/n bobineuses Machines outils (tours) Dérouleuses de bois
 Dérouleuses de bois.")
23
Condition de démarrage d’un moteur
! Quel que soit le type de moteur ! Ma = Jdw/dt = Mm – Mr >0 Mm > Mr Mm = couple moteur Mr = couple résistant J = moment d’inertie Ma = couple d’accélération L’accélération est d’autant plus grande que : Mm est grand devant Mr L’inertie J est faible Mr Le moteur ne démarre pas ! Md < Mr Mr Point de fonctionnement

24
Définition des indices de protection (IP)
Indices de protection des enveloppes des matériels électriques Selon norme CEI EN (IP) - EN (IK)
 - EN (IK)")
25
Définition des indices de protection (IP)
Indices de protection des enveloppes des matériels électriques Selon norme CEI EN (IP) - EN (IK)
 - EN (IK)")
26
Définition des indices de protection (IP)
Indices de protection des enveloppes des matériels électriques Selon norme CEI EN (IP) - EN (IK)
 - EN (IK)")
27
Commande d’un moteur asynchrone

28
Commande d’un moteur asynchrone

29
Commande d’un moteur asynchrone

30
Commande d’un moteur asynchrone








 équipent.>")














