Télécharger la présentation
1
CHAPITRE II : Systèmes à deux degrés de liberté
1-Etude d’un cas simple 1-1 Mise en équations 1-2 Solutions harmoniques 1-3 Pulsations propres- Modes propres 1-4 Solution générale 2-Exercice: systèmes forcés 3- Equations de Lagrange 3-1 Rappel du formalisme 3-2 Equations de Lagrange 3-3 Exemple 3-3-1Energie cinétique 3-3-2 Energie potentielle 3-3-3 Mise en équations et solutions

2
CHAPITRE II Système à deux degrés de liberté 1-Etude d’un cas simple
Un exemple simple mais généralisable couplage m1 m2 k K x2 K x1 1-1) Mise en équations couplage Masse 1 : Masse 2 :
 Mise en équations. couplage. Masse 1 : Masse 2 :")
3
1-2) Solutions harmoniques
Pb : existe t il une (ou des) solution harmonique pour le système ? Si OUI les deux masses vibrent avec la même pulsation ………...
 solution harmonique pour le système Si OUI les deux masses vibrent avec la même pulsation. ………...")
5
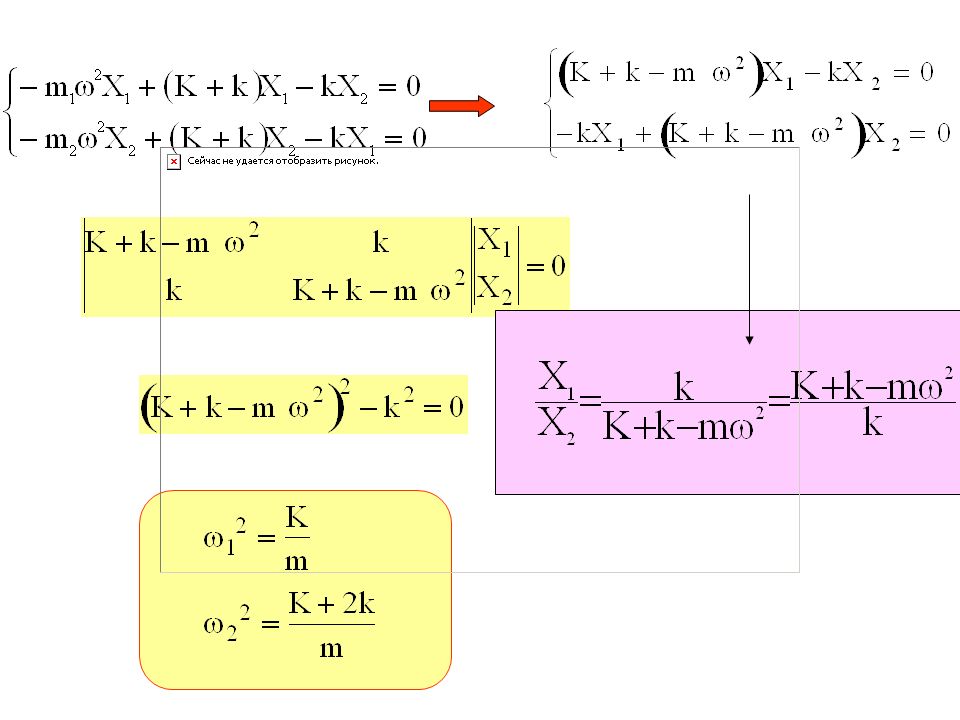
1-3) Pulsations propres-Modes propres
K k m x1 x2

6
Les deux masses sont écartées de leur position d ’équilibre
de la même quantité A alors Mode w1 Les deux masses sont écartées de leur position d ’équilibre de quantités opposées B et -B alors Mode w2

7
Si les deux masses sont écartées de leur position d ’équilibre
Cas général Si les deux masses sont écartées de leur position d ’équilibre de quantités C et D 1-4) Solution générale En phase En opposition de phase w1 w2
 Solution générale. En phase. En opposition de phase. w1. w2.")
8
2-Exercice Déterminer la réponse au système forcé ci dessous

9
3- Equations de LAGRANGE
3-1) Rappel du formalisme x F dérive d ’un potentiel
 Rappel du formalisme. x. F dérive d ’un potentiel.")
10
Exemple 2 système à 2 degré de liberté

11
K k m1 m2 x1 x2 Autres exemples 3 ressorts 2 masses

12
3-2) Equations de LAGRANGE
D ’une manière générale Matrice masse (symétrique) Matrice raideur (symétrique) Matrice dissipation (symétrique) Fonction de dissipation
 Matrice raideur (symétrique) Matrice dissipation (symétrique) Fonction de dissipation.")
13
K 2K m 3-3) Exemple
 Exemple")
14
K 2K m 2 1 3 K 2K m 2 1 3

15
3-3-2) Energie potentielle
3-3-1) Energie cinétique 3-3-2) Energie potentielle Où les d sont les élongations des ressorts 1, 2, et 3 1 Ressort 1 Après deformation initialement Nouvelle longueur l
 Energie cinétique ) Energie potentielle. Où les d sont les élongations des ressorts 1, 2, et Ressort 1. Après deformation. initialement. Nouvelle longueur l.")
16
Ressort 2 Ressort 3 Après déformation initialement Nouvelle longueur l

17
3-3-3) Mise en équations et solutions
 Mise en équations et solutions")
18
K 2K m 2 1 3 X=-Y X=Y

19
M,J R Approximation des petits déplacements q m L






 Equation de la corde vibrante 1) Le modèle.>")






>")







