Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Structure du cours Introduction générale Notions de géodésie
Les méthodes topométriques Le GPS Les méthodes indirectes

2
Le système

3
Le segment spatial 21 satellites + 3 20200 km 6 plans orbitaux à 60°
11h 58min

4
Le signal GPS Deux fréquences L1 et L2 Des codes de modulation
L1 = MHz L2 = MHz Des codes de modulation

5
Le message de navigation
Temps GPS (origine 6 janvier 80, 0h00) Éphémérides Almanachs Correction ionosphérique État de la constellation Paramètres de transformation UTC
 Éphémérides. Almanachs. Correction ionosphérique. État de la constellation. Paramètres de transformation UTC.")
6
Le segment de contrôle Enregistrement des signaux
Prédiction des éphémérides Observation du comportement des oscillateurs Collecte d’informations météorologiques Envoi des informations nécessaires au message de navigation

7
Le segment utilisateur
Types de récepteur et services Méthodes de positionnement Planification et préparation de mission Rattachement de chantier

8
Types de récepteur Récepteur de navigation Récepteur géodésique

9
Les services de GPS Éphémérides précises sous 10 jours
Etat de la constellation…

10
Méthodes de positionnement
Principe de la mesure GPS Les pseudo-distances Positionnement autonome Positionnement différentiel La phase Mode statique Mode dynamique

11
Principe de la mesure de code

12
Principe de la mesure de code

13
Principe de la mesure de phase

14
Les facteurs de qualité
Un positionnement planimétrique : HDOP (Horizontal DOP) Un positionnement altimétrique : VDOP (Vertical DOP) Une détermination du temps : TDOP (Time DOP) Un positionnement 3D (avec un minimum de trois satellites) : PDOP (Position DOP)
 Un positionnement altimétrique : VDOP (Vertical DOP) Une détermination du temps : TDOP (Time DOP) Un positionnement 3D (avec un minimum de trois satellites) : PDOP (Position DOP)")
15
Mauvais GDOP dus aux obstacles
Le GDOP Mauvais GDOP Bon GDOP Mauvais GDOP dus aux obstacles

16
Les sources d’erreur Le bruit Les biais Les fautes
Dérive d’horloge, jusqu’à 1 m Précision des éphémérides, 1 m Délai troposphérique, 1 m Délai ionosphérique, 10 m Multi-trajet Les fautes

17
Les pseudo-distances Efficacité du positionnement autonome depuis la levée du SA

19
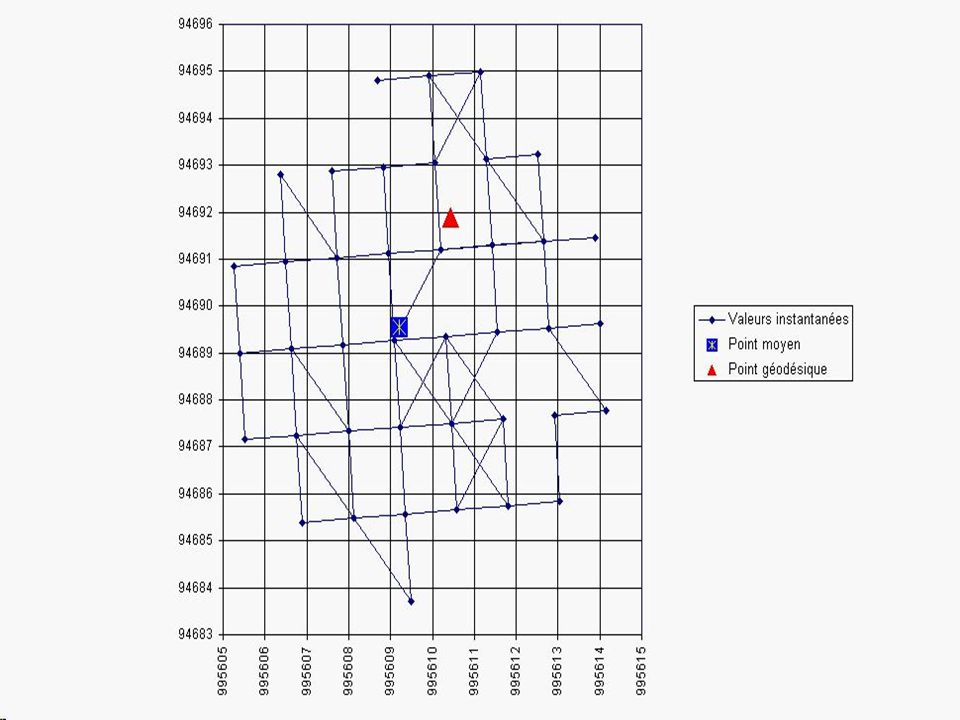
Les pseudo-distances Efficacité du positionnement autonome depuis la levée du SA Stabilité spatiale des mesures instantanées

21
Les pseudo-distances Efficacité du positionnement autonome depuis la levée du SA Stabilité spatiale des mesures instantanées Intérêt du calcul de la moyenne temporelle des observations

23
Les pseudos-distances
Positionnement différentiel Temps réel Post-traitement La question de la base Courte (<5 km) Moyenne (5 à 20 km) Longue (>20 km)
 Moyenne (5 à 20 km) Longue (>20 km)")
24
La phase Mode statique Mode dynamique Cinématique Stop-and-Go
Pseudo-cinématique Statique rapide

25
Récapitulatif des méthodes GPS

26
Choix de la méthode

27
Choix d’un récepteur

28
Nombre de circuits de poursuite Circuits séquencés ou parallèles
Considérations techniques Types de mesures Mono ou bi-fréquence Nombre de circuits de poursuite Circuits séquencés ou parallèles Type d’antenne, caractéristique du bruit Exactitude des mesures de code Adéquation pour les travaux Poids Taille Robustesse Températures de fonctionnement Alimentation Fonctionnement Facilité d’emploi Applications prévues Contrôle de la constellation Caractérisation des points Logiciels connexes Prévision de constellation Téléchargement Options de post-traitement Fonds cartographiques Stockage de données Support de mémoire pour les données Nature des données enregistrées Débit Capacité (Mo, temps de mesure…) Mode de récupération Considérations commerciales Garanties Coûts Support technique Formation
 Mode de récupération. Considérations commerciales. Garanties. Coûts. Support technique. Formation.")
29
Validation des procédures
Trois composantes à éprouver : Technique de positionnement Équipement Méthode de traitement

30
Reconnaissance de terrain
Récolte des informations nécessaires à un déroulement efficace de la campagne de mesures Vérifier si les emplacements conviennent au GPS Absence d’obstacles Absence de sources d’interférences Vérifier l’existence de points géodésiques Matérialisations des points Stabilité des points Formuler les besoins logistiques Mode de transport Temps d’accès, de déplacements Equipements spéciaux Mesures à adopter Choix d’autres emplacements Etablissement de stations excentrées Etablissement de descriptions Levés de masques

31
Rattachement de chantier
Les logiciels de transformation CIRCE 2000 © IGN CONVERS Pratiquement : Colocation de un ou plusieurs points Calcul d’une transformation d’ajustement

Présentations similaires











 (Etape 9 / Principe 4)>")





 Première mission ExoMars (départ 2013) Un objectif du Rover PASTEUR.>")



