Télécharger la présentation
1
Moteur à courant continu

2
Les valeurs nominales sont notées sur la plaque signalétique
Définitions de base Vitesse de base C'est la vitesse nominale du moteur obtenue pour la charge nominale, la tension d'induit nominale, l'excitation nominale, à la température de service normale. Les valeurs nominales sont notées sur la plaque signalétique

3
Conception d'ensemble STATOR
La carcasse, les pôles principaux et les pôles de commutation sont entièrement feuilletés. Les composants du stator sont soudés ensemble dans un bâti de fixation qui aligne et presse les tôles ensemble en une unité monobloc.

4
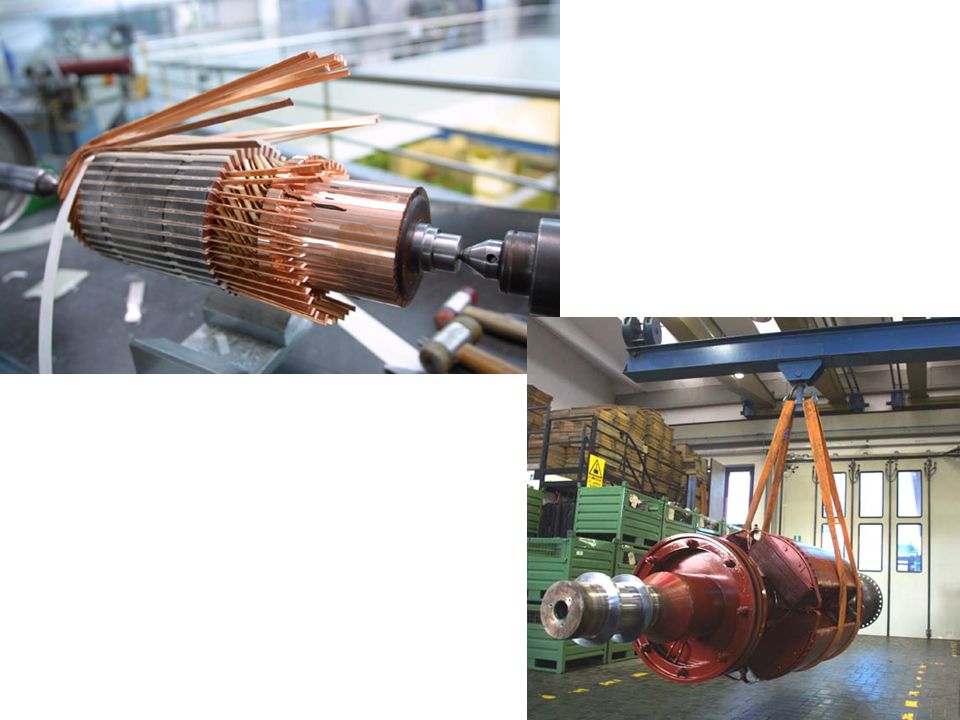
Conception d'ensemble INDUIT (Rotor)
Le noyau d'induit est constitué de disques en tôles électromagnétiques isolées. L'enroulement d'induit est en cuivre isolé verni. Les bobinages de cuivre sont placés dans l'isolant des encoches.

6
Principe de fonctionnement
Un moteur à courant continu comporte deux parties : le stator, partie fixe, constitué par un aimant ou un électroaimant appelé également inducteur qui crée un champ magnétique dirigé vers l'axe du rotor. Le rotor, partie mobile, appelé également induit, constitué par un cylindre d'acier doux à la périphérie duquel sont disposés des conducteurs reliés aux lames du collecteur sur lesquelles frottent deux charbons, ou balais, qui assurent la liaison avec les bornes du moteur.

7
Principe de fonctionnement
Lorsque les conducteurs sont parcourus par un courant, ils sont soumis à des forces F1 et F2 qui tendent à faire tourner le rotor. Le collecteur permet d'inverser le sens du courant dans les conducteurs lorsque ceux-ci passent le plan vertical. Ainsi le sens du couple des forces F1 et F2 et donc le sens de rotation du moteur est conservé.

8
Les bobinages d'induit Le collecteur est constitué de bagues conductrices où frottent 2 balais appelés charbon. L'induit se comporte comme une seule et même bobine lorsqu'il est alimenté par les balais. Il est souhaitable d'avoir un grand nombre de bobines, cela permet : un couple plus régulier, un effet inductif entre 2 bobines plus faible donc des étincelles plus faibles.

9
Moteur courant continu
Symboles et câblage Symbole général Moteur courant continu Moteur courant continu à aimant permanent

10
Définitions Cm : couple moteur (Nm) Km : constante de fabrication Im : courant moteur (A) E : force électromotrice (fem) : vitesse angulaire en rad.s-1 N : vitesse de rotation en tr.min-1 Relation mécanique Cm = Km . Im

11
Relations du moteur à courant continu à aimant permanent
Modèle équivalent : Le moteur à courant continu à aimant permanent est équivalent à une force électromotrice en série avec une résistance interne : R induit E = Ke . Um = R.Im + E

12
! Attention à l’unité de Ke !
Force électromotrice fem ou fcem La force électromotrice ou force contre électromotrice (fem ou fcem) d'un moteur à courant continu à aimant permanent est proportionnelle à la vitesse de rotation. En particulier, si la vitesse est nulle, la fem est nulle aussi. E = Ke . (avec Ke en V/rad.s-1) ou E = Ke . N (avec Ke en V/tr.min-1) ! Attention à l’unité de Ke !
 d un moteur à courant continu à aimant permanent est proportionnelle à la vitesse de rotation. En particulier, si la vitesse est nulle, la fem est nulle aussi. E = Ke . (avec Ke en V/rad.s-1) ou. E = Ke . N (avec Ke en V/tr.min-1) ! Attention à l’unité de Ke !")
13
Bilan des puissances Expression des puissances lorsque la tension aux bornes du moteur et l'intensité qui le traverse sont variables au cours du temps. Puissance absorbée Pa = Um × Im Pertes joule : Pj = R × Ieff² Puissance électrique Pe = E × Im (Puissance électrique transmise à la partie tournante) Puissance utile Pu = Cm × C'est la puissance mécanique fournie par le moteur pour entraîner la charge. Elle est donc nulle en fonctionnement à vide. Pertes constantes Pc Ces pertes sont la somme des pertes mécaniques et magnétiques. Elles sont constantes à une vitesse donnée et peuvent se déterminer à vide. Rendement h = Pu / Pa
 Puissance utile. Pu = Cm × C est la puissance mécanique fournie par le moteur pour entraîner la charge. Elle est donc nulle en fonctionnement à vide. Pertes constantes. Pc Ces pertes sont la somme des pertes mécaniques et magnétiques. Elles sont constantes à une vitesse donnée et peuvent se déterminer à vide. Rendement h = Pu / Pa.")
14
Cm=k.Im Caractéristique électrique Cm Cn
Couple en fonction du courant Le couple est proportionnel au courant moteur Cm=k.Im Cm Cn Gn couple nominal Un tension nominale In Im (A) I0 Courant minimum In Courant nominal Nominal : se dit d’une performance annoncée par le fabricant.
 I0 Courant minimum. In Courant nominal. Nominal : se dit d’une performance annoncée par le fabricant.")
15
E = ke.W Caractéristique électrique
Vitesse en fonction de la tension moteur La vitesse est proportionnelle à la tension d’induit E = ke.W N(tr.min-1) n0 Vitesse à vide N0 Nn nn Vitesse nominale Um(V) U0 tension minimum avec couple nominal Un tension nominale
 n0 Vitesse à vide. N0. Nn. nn Vitesse nominale. Um(V) U0 tension minimum avec couple nominal. Un tension nominale.")