Télécharger la présentation
1
LA MACHINE A COURANT CONTINU (MCC)
1- Mise en situation Energie électrique Energie mécanique La machine à courant continu est un convertisseur d’énergie réversible. Plusieurs systèmes du laboratoire de SI sont munis d’une MCC: - chariot de golf, - cordeuse de raquettes, - maxpid, - pilote hydraulique …

2
LA MACHINE A COURANT CONTINU (MCC) 2- Constitution
Induit Inducteur Balais Ventilateur Arbre de sortie Bornier d’alimentation Collecteur 2

3
Inducteur ou stator Aimants permanents Bobinage (électroaimant)
MCC bipolaire MCC quadripolaire L’inducteur (le stator) est une source de champ magnétique et de flux magnétique créés par un électroaimant grâce à un bobinage « inducteur » ou des aimants permanents. Le bobinage de l’électroaimant (enroulement statorique) est parcouru par un courant continu appelé courant d’excitation (Ie). Deux types de machines existent donc : - la MCC à aimants permanents (systèmes du labo de SI). - la MCC à inducteur bobiné, Induit M Aimants permanents Inducteur Induit M
 est une source de champ magnétique et de flux magnétique créés par un électroaimant grâce à un bobinage « inducteur » ou des aimants permanents. Le bobinage de l’électroaimant (enroulement statorique) est parcouru par un courant continu appelé courant d’excitation (Ie). Deux types de machines existent donc : - la MCC à aimants permanents. (systèmes du labo de SI). - la MCC à inducteur bobiné, Induit. M. Aimants permanents. Inducteur. Induit. M.")
4
Induit ou rotor Tôles d’acier
Encoches recevant les conducteurs de l’induit L’induit (le rotor) est formé d’un empilage de tôles circulaires en acier au silicium, isolées par vernis pour réduire les pertes fer. Les tôles sont munies d’encoches permettant de loger le bobinage « actif ». Ce bobinage est parcouru par le courant d’alimentation (I ou Ia) grâce à des balais (ou charbons) fixes glissant sur le collecteur.
 est formé d’un empilage de tôles circulaires en acier au silicium, isolées par vernis pour réduire les pertes fer. Les tôles sont munies d’encoches permettant de loger le bobinage « actif ». Ce bobinage est parcouru par le courant d’alimentation (I ou Ia) grâce à des balais (ou charbons) fixes glissant sur le. collecteur.")
5
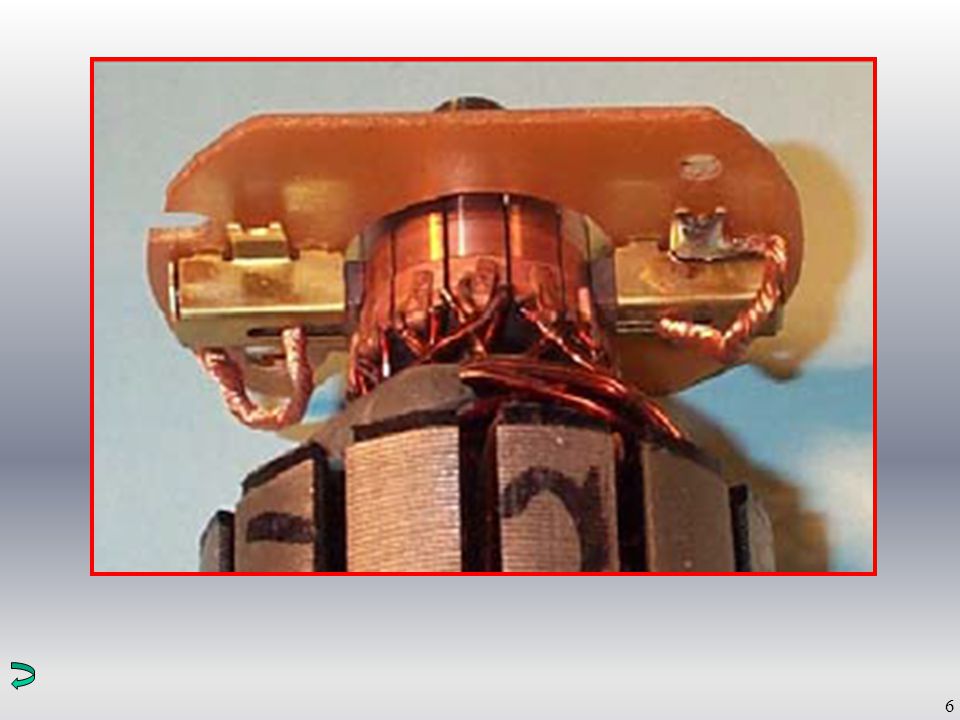
Enroulement statorique
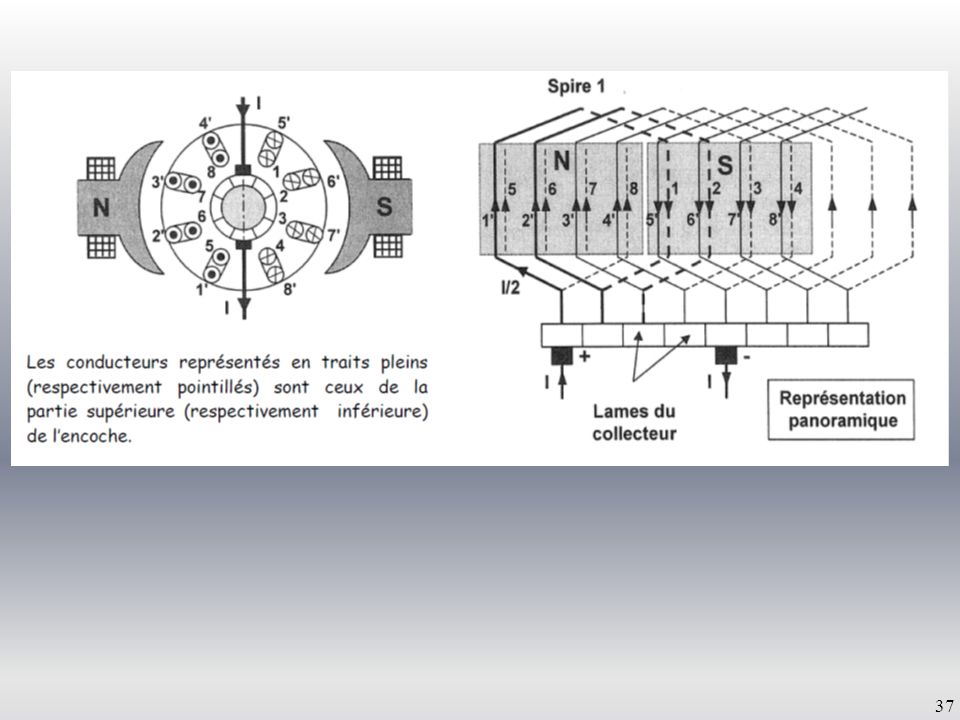
Collecteur - Balais Le collecteur est constitué par une juxtaposition cylindrique de lames de cuivre séparées par des lames isolantes. Chaque lame du collecteur est reliée électriquement à un ou plusieurs conducteurs de l’induit. Enroulement statorique I entrant I sortant Les balais permettent l'alimentation de l'induit (partie en rotation) grâce à un contact glissant entre les lames du collecteur et le circuit électrique extérieur. L’ensemble balais-collecteur assure l’inversion de sens du courant dans les conducteurs de l’induit au passage de la ligne neutre, ce qui permet d'entretenir la rotation du rotor en imposant le sens du courant sous chaque pôle.
 grâce à un contact glissant entre les lames du collecteur et le circuit électrique extérieur. L’ensemble balais-collecteur assure l’inversion de sens du courant dans les conducteurs de l’induit au passage de la ligne neutre, ce qui permet d entretenir la rotation du rotor en imposant le sens du courant sous chaque pôle.")
7
3- Conversion électromécanique et fcem induite
Loi de Laplace : l’action d’un champ magnétique sur un conducteur traversé par un courant produit une force (animation). L’ensemble des forces exercées sur les conducteurs de l’induit engendre un couple qui fait tourner le moteur. Loi de Lenz-Faraday : lorsqu’un conducteur se déplace dans un champ magnétique, il apparaît une force contre électromotrice (fcem) à ses bornes. p: le nombre de paires de pôles de l’inducteur, a: le nombre de paires de voies d'enroulement (« chemins » pour aller du balai + au -) de l’induit, N: le nombre de conducteurs de l'induit, : le flux moyen sous un pôle de l’inducteur, : la vitesse angulaire de l'induit en rd/s. La fcem totale aux bornes de l’induit E à vide a pour expression:
. L’ensemble des forces exercées sur les conducteurs de l’induit engendre un couple qui fait tourner le moteur. Loi de Lenz-Faraday : lorsqu’un conducteur se déplace dans un champ magnétique, il apparaît une force contre électromotrice (fcem) à ses bornes. p: le nombre de paires de pôles de l’inducteur, a: le nombre de paires de voies d enroulement (« chemins » pour aller du balai + au -) de l’induit, N: le nombre de conducteurs de l induit, : le flux moyen sous un pôle de l’inducteur, : la vitesse angulaire de l induit en rd/s. La fcem totale aux bornes de l’induit E à vide a pour expression:")
8
MCC à excitation séparée
Propriétés A flux constant (MCC à aimants permanents ou MCC à inducteur bobiné avec Ie = Cte ), la fcem est proportionnelle, à la vitesse de rotation de la machine. Ke : constante de fcem (ou de fem) Idéale = k'.Ie Ie IeM Réelle (saturation du circuit magnétique) A vitesse constante, la fcem est proportionnelle, au courant d'excitation Ie, si le circuit magnétique n'est pas saturé (Ie < IeM): . 4- Différents modes d’excitation de l’inducteur Inducteur Induit MCC à excitation série Mode utilisé en traction électrique (couple élevé au démarrage) MCC à excitation séparée Mode le plus répandu
, la fcem est proportionnelle, à la vitesse de rotation de la machine. Ke : constante de fcem (ou de fem) Idéale = k .Ie. Ie. IeM. Réelle (saturation du circuit magnétique) A vitesse constante, la fcem est proportionnelle, au courant d excitation Ie, si le circuit magnétique n est pas saturé (Ie < IeM): . 4- Différents modes d’excitation de l’inducteur. Inducteur. Induit. MCC à excitation série. Mode utilisé en traction électrique. (couple élevé au démarrage) MCC à excitation séparée. Mode le plus répandu.")
11
Modèle électrique équivalent
5- Comportement de la MCC en régime permanent Régime permanent les grandeurs électriques, magnétiques et mécaniques sont constantes. Modèle électrique équivalent Ue Re Ie Les pertes par effet Joule dans l'inducteur sont: Les pertes par effet Joule dans l'induit sont: La puissance électromagnétique transmise à l'induit est : Expression du couple électromagnétique La puissance électromagnétique Pem donne naissance au couple électromagnétique Cem. C’est cette puissance qui, aux pertes près, est transformée en puissance utile sur l’arbre.

12
Expression du couple utile Cu
Propriété: A flux constant, le couple électromagnétique est proportionnel au courant d'induit : Kc : constante de couple Rq.: Kc = Ke = K. Expression du couple utile Cu Le couple utile Cu (ou couple moteur Cm) disponible sur l'arbre d’entraînement est légèrement inférieur au couple électromagnétique Cem. Cp : couple de pertes Le couple de pertes Cp est dû: - aux pertes ferromagnétiques dans le rotor (hystérésis et courant de Foucault) - aux pertes mécaniques: frottements aux paliers, ventilation. Le couple Cp se déduit de la mesure du courant absorbé par l’induit à vide I0: Cu = 0 Cp = Cem Si I0 est très faible devant I, on peut négliger le couple de pertes, ce qui conduit à: En régime permanent, le couple utile Cu est égal à couple résistant Cr dû à la charge. Propriété: A flux constant et au couple de pertes près, le courant absorbé par l'induit est proportionnel au couple mécanique demandé par la charge.
 disponible sur l arbre d’entraînement est légèrement inférieur au couple électromagnétique Cem. Cp : couple de pertes. Le couple de pertes Cp est dû: - aux pertes ferromagnétiques dans le rotor (hystérésis et courant de Foucault) - aux pertes mécaniques: frottements aux paliers, ventilation. Le couple Cp se déduit de la mesure du courant absorbé par l’induit à vide I0: Cu = 0 Cp = Cem Si I0 est très faible devant I, on peut négliger le couple de pertes, ce qui conduit à: En régime permanent, le couple utile Cu est égal à couple résistant Cr dû à la charge. Propriété: A flux constant et au couple de pertes près, le courant absorbé par l induit est proportionnel au couple mécanique demandé par la charge. ")
13
6- Moteur à flux constant en régime établi
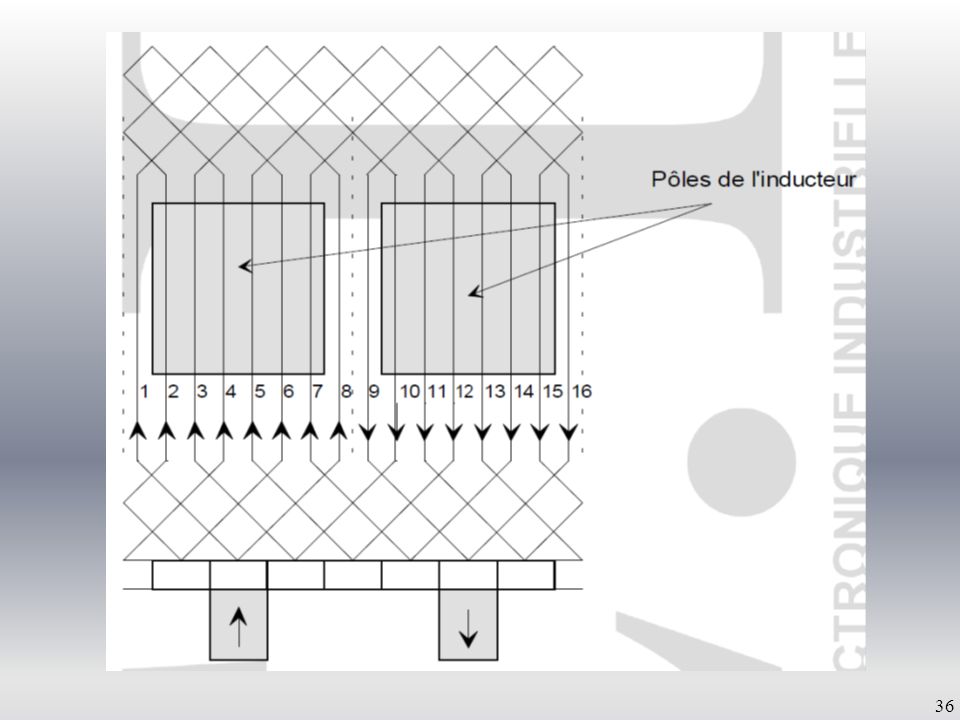
Bilan des puissances en moteur ELECTRIQUE Puissance absorbée MECANIQUE Puissance utile Pertes collectives 6- Moteur à flux constant en régime établi Rappel des propriétés de la MCC à flux constant: avec Ke = KC = K. Ke est la constante de fcem et s'exprime en V.s/rad Kc est la constante de couple et s'exprime en N.m/A Ces 2 constantes s'expriment par le même nombre à condition d'utiliser les unités précédentes. Dans les documentations constructeur, Ke est souvent donné en V/(1000 tr/min)
")
14
Caractéristiques électromécaniques
Vitesse en fonction du courant est pratiquement la vitesse du moteur à vide. Rq.: à vide, il ne faut pas couper le flux lorsque l'induit est sous tension car la machine peut s'emballer: 0 Ke Cem , Cu Cem Cu Couples en fonction du courant et Caractéristique mécanique Cu = f() Cu = f() avec U = Cste Pente élevée si R petite En considérant Cu Kc.I, on obtient: Caract. de la charge entraînée Cr = f() Cu = f() est la principale caractéristique de la MCC. Il faut l’associer à la caractéristique Cr = f() de la charge entraînée pour déterminer le point de fonctionnement. Point de fonctionnement
 Cu = f() avec U = Cste. Pente élevée si R petite. En considérant Cu Kc.I, on obtient: Caract. de la charge entraînée Cr = f() Cu = f() est la principale caractéristique de la MCC. Il faut l’associer à la caractéristique Cr = f() de la charge entraînée pour déterminer le point de fonctionnement. Point de fonctionnement.")
15
7- Quadrants de fonctionnement
La MCC est un convertisseur électromécanique réversible. Si on entraîne le rotor tout en alimentant l'inducteur, une fem induite apparaît aux bornes de l’induit et la machine (génératrice à courant continu) transforme l'énergie mécanique en énergie électrique. Les MCC sont essentiellement utilisées en moteur. Cependant, lors des phases de freinage, il arrive qu’elles fonctionnent en génératrice. Q1 et Q3 : P = C. > 0, c’est le fonctionnement en moteur; la machine produit un "couple moteur" et fournit de l'énergie mécanique à la charge. Q2 et Q4 : P = C. < 0, c’est le fonctionnement en génératrice; la machine produit un "couple de freinage" et reçoit de l'énergie mécanique de la charge.
 transforme l énergie mécanique en énergie électrique. Les MCC sont essentiellement utilisées en moteur. Cependant, lors des phases de freinage, il arrive qu’elles fonctionnent en génératrice. Q1 et Q3 : P = C. > 0, c’est le fonctionnement en moteur; la machine produit un couple moteur et fournit de l énergie mécanique à la charge. Q2 et Q4 : P = C. < 0, c’est le fonctionnement en génératrice; la machine produit un couple de freinage et reçoit de l énergie mécanique de la charge.")
16
U I

17
8- MCC en régime transitoire
On étudie désormais le cas d’une MCC à excitation séparée et flux constant (ou MCC à aimants permanents), accouplée à une charge. Modèle de connaissance Point de vue électrique Modèle électrique complet de l’induit Domaine temporel: Domaine fréquentiel: Le principe fondamental de la dynamique appliqué à un solide en rotation permet d'écrire : Point de vue mécanique Domaine temporel: J : moment d’inertie de l’ensemble moteur + charge (kg.m2 ) Cem : couple électromagnétique Cp : couple de pertes : Cp = Cs + f. Cs: couple de frottement sec (N.m) f: coefficient de frottement visqueux Cr: couple résistant dû à la charge entraînée. Domaine fréquentiel:
, accouplée à une charge. Modèle de connaissance. Point de vue électrique. Modèle électrique complet de l’induit. Domaine temporel: Domaine fréquentiel: Le principe fondamental de la dynamique appliqué à un solide en rotation permet d écrire : Point de vue mécanique. Domaine temporel: J : moment d’inertie de l’ensemble moteur + charge (kg.m2 ) Cem : couple électromagnétique. Cp : couple de pertes : Cp = Cs + f. Cs: couple de frottement sec (N.m) f: coefficient de frottement visqueux. Cr: couple résistant dû à la charge entraînée. Domaine fréquentiel:")
18
u u = U pour t > 0 Réponse à un échelon de tension U U t
Point de vue électromécanique On pose Ke = Kc = K. Domaine temporel: Domaine fréquentiel: Condition initiale: (0) = 0 Hypothèses: on considère le couple résistant Cr(t) constant. on néglige les pertes ( Cp = 0 ) Réponse à un échelon de tension U u t U u = U pour t > 0 1- Prise en compte du modèle électrique simplifié du moteur (L négligée)
 = 0. Hypothèses: on considère le couple résistant Cr(t) constant. on néglige les pertes ( Cp = 0 ) Réponse à un échelon de tension U. u. t. U. u = U pour t > Prise en compte du modèle électrique simplifié du moteur (L négligée) ")
19
C’est une équation différentielle du 1er ordre, de la forme:
t L’évolution de (t) est donc la suivante: 2- Prise en compte du modèle électrique complet du moteur C’est une équation différentielle du 2ème ordre, de la de la forme: 0 est la pulsation propre: m est le facteur d’amortissement
 est donc la suivante: 2- Prise en compte du modèle électrique complet du moteur. C’est une équation différentielle du 2ème ordre, de la de la forme: 0 est la pulsation propre: m est le facteur d’amortissement.")
20
Schéma bloc + - + -
t Dans la pratique, m > 1 (régime apériodique amorti). L’évolution de (t) est donc la suivante: Schéma bloc Les lois qui régissent le fonctionnement du moteur sont: Rq.: ici, Cs(p) est intégré dans Cr(p) + - + -
. L’évolution de (t) est donc la suivante: Schéma bloc. Les lois qui régissent le fonctionnement du moteur sont: Rq.: ici, Cs(p) est intégré dans Cr(p) + - + - ")
21
Finalement : + - + - Fonction de transfert
La connaissance de la fonction de transfert du moteur permet d’en étudier son asservissement en vitesse ou en position. On considère le couple résistant Cr(p) = 0. D’après le schéma bloc : 21
 = 0. D’après le schéma bloc : 21.")
22
e : constante de temps électrique Si on pose:
em : constante de temps électromécanique H0 : gain statique alors avec En général En considérant = 1, on obtient l’expression la plus utilisée en asservissement: Avec e << em , on peut utiliser la forme simplifiée suivante (valable pour les basses fréquences):
:")
23
9- Questions de concours
Concours Centrale 2012 filière TSI : ligne de fabrication de laine de verre 23

24
Concours CCP 2013 filière TSI : fauteuil roulant TopChair

25
Concours Centrale 2010 filière TSI : robot d’inspection tubulaire
III.C.1 À vide le couple utile est nul, donc Cp = Kt.I0 = 16 μNm III.C.2 Rotor bloqué, la fem est nulle, donc U = R.I1 I1 = 140 mA Cm1 = Kt.I1 – Cp Cm1 = 992 μNm Cette valeur est supérieure à Cm0 = 400 μNm calculé en III.B.5, le blocage est assuré. III.D Rotor bloqué la puissance dissipée est égale à P = R.I1²= 1,25 W. Il suffit de mesurer l’intensité pour détecter le blocage du moteur, il faut temporiser la coupure de l’alimentation afin de faire la distinction entre le courant de démarrage (bref) et le courant de blocage du moteur.
 et le courant de blocage du moteur.")
26
10 Détermination des éléments du schéma équivalent :
L’analyse de i(t) pour un échelon de tension permet de déterminer R, L et J : A t=0, l’interrupteur K se ferme alors U=Ua .La vitesse du moteur est nulle W=0 rd/s. On relève i=f(t) et U=f(t) à l’oscilloscope La variation du courant va se décomposer en deux phases : Phase 1 : Établissement rapide du courant à travers le circuit R,L (constante de temps électrique te= L/R), le moteur n’a pas eu le temps de démarrer. Phase 2 : la vitesse s’établit progressivement donc E augmente et I diminue avec la constante de temps mécanique du moteur tem
 pour un échelon de tension permet de déterminer R, L et J : A t=0, l’interrupteur K se ferme alors U=Ua .La vitesse du moteur est nulle W=0 rd/s. On relève i=f(t) et U=f(t) à l’oscilloscope. La variation du courant va se décomposer en deux phases : Phase 1 : Établissement rapide du courant à travers le circuit R,L (constante de temps électrique te= L/R), le moteur n’a pas eu le temps de démarrer. Phase 2 : la vitesse s’établit progressivement donc E augmente et I diminue avec la constante de temps mécanique du moteur tem.")
27
La constante de temps te est mesurée pour 63% de Ua/R soit 2A
Analyse de la phase 1 : Le courant i(t) s’établit à travers le circuit R, L (E=0) d’après la loi d’établissement : avec te=L/R Les oscillogrammes ci-dessous correspondent à un échelon de tension Ua=4V appliqué aux bornes du moteur de la cordeuse. 3,2 A 0,63x3,2 te=1ms Détermination de R : Le courant en régime établi est de 3,2 A soit une résistance d’induit R=1,25 W Détermination de L : La constante de temps te est mesurée pour 63% de Ua/R soit 2A D’où la valeur de l’inductance L=1,25 mH
 s’établit à travers le circuit R, L (E=0) d’après la loi d’établissement : avec te=L/R. Les oscillogrammes ci-dessous correspondent à un échelon de tension Ua=4V appliqué aux bornes du moteur de la cordeuse. 3,2 A. 0,63x3,2. te=1ms. Détermination de R : Le courant en régime établi est de 3,2 A soit une résistance d’induit R=1,25 W. Détermination de L : La constante de temps te est mesurée pour 63% de Ua/R soit 2A. D’où la valeur de l’inductance L=1,25 mH.")
28
avec L’essai est réalisé à vide Cr = 0.
Analyse de la phase 2 : Mesure de la constante de temps mécanique tm sans génératrice : Lorsque le moteur prend de la vitesse, on néglige l’influence de L Les équations du moteur sont Équation électrique: Équations électromécaniques: Équation mécanique: L’essai est réalisé à vide Cr = 0. Les frottements visqueux f sont négligés La résolution de l’équation différentielle pour l’équation de la vitesse : avec Remarque : Avec une génératrice tachymétrique tem est facile à déterminer

29
Équation du courant lors de l’évolution de la vitesse :
Les oscillogrammes pour un échelon de Ua=4V montrent l’évolution du courant i(t) lors de la mise en vitesse du chariot (à vide) : Les oscillations sont dues aux discontinuités de i sur le collecteur (passage des balais d’une lame à l’autre) tm=90ms K=0.03 V/rd.s-1 donc J=64, Kg.m²
 lors de la mise en vitesse du chariot (à vide) : Les oscillations sont dues aux discontinuités de i sur le collecteur (passage des balais d’une lame à l’autre) tm=90ms. K=0.03 V/rd.s-1. donc J=64, Kg.m².")
30
Mesure de la constante K=KE=KI :
K=KE=KI à condition que KE soit exprimé en V/rd.s-1 et KI en Nm/A A partir de la mesure du couple : Le moteur de la cordeuse est alimenté sous deux tensions différentes, on relève I et T : Le couple Cm est calculé avec un rendement du réducteur = 0,7 On en déduit : =0,03 V/rd.s-1

31
11. Application à la modélisation de la cordeuse sous Mathlab
Saisie du schéma bloc du moteur :

32
Cordeuse: Saisie du schéma bloc moteur + PO
Comparaison des réponses à un échelon de tension U=3V entre le modèle et le système réel. Amélioration du modèle par la prise en compte des pertes constantes

33
Modélisation sous MathLab Module SimScape
Introduction : Les modèles de représentation physique sont basés sur l’utilisation de deux types de variables différentes : Variable potentielle Variable flux Quelques exemples : Domaine Variable potentielle Variable flux Électrique U (tension DDP) I (Intensité flux d’électrons) Hydraulique P (Pression DDP) Q (débit) Mécanique Vitesse rot ou transl Couple ou effort Magnétique Force magnéto-motrice Flux magnétique Thermique Différence de températures Puissance de chauffe
 I (Intensité flux d’électrons) Hydraulique. P (Pression DDP) Q (débit) Mécanique. Vitesse rot ou transl. Couple ou effort. Magnétique. Force magnéto-motrice. Flux magnétique. Thermique. Différence de températures. Puissance de chauffe.")
34
Les machines électriques tournantes sont des convertisseurs de puissance :
En fonctionnement moteur, au niveau de l’entrefer, la puissance électrique est transformée en puissance magnétique puis mécanique (puissance transmise EI ou CW) avec un rapport K entre les grandeurs électriques et magnétiques.
 avec un rapport K entre les grandeurs électriques et magnétiques.")
35
Le fonctionnement peut être symbolisé un transformateur :
Dans SimScape, Les « potentiels » de référence sont donc communs pour toutes les variables potentielles de mêmes types : Un potentiel de référence électrique : Un potentiel de référence mécanique : pour un système en rotation : variable potentielle W pour un système en translation : variable potentielle V La mesure de couple se fait par branchement en série du capteur (variable flux) Le capteur de vitesse est connecté en parallèle sur la variable vitesse (variable potetielle) Exemple de réalisation pour la partie opérative de la cordeuse
 Le capteur de vitesse est connecté en parallèle sur la variable vitesse (variable potetielle) Exemple de réalisation pour la partie opérative de la cordeuse.")


>")

















