Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Résistance des Matériaux
La résistance des matériaux est étroitement associée à la statique. Celle-ci traite de l’équilibre des corps solides supposés indéformable sous l’action des forces qui les sollicites. une science qui s’intéresse.

2
Résistance des Matériaux

3
Résistance des Matériaux

4
Résistance des Matériaux

5
Résistance des Matériaux

6
Résistance des Matériaux
Sommer Chapitre 01 : Introduction à la Résistance des Matériaux. Chapitre 02 : Notion de la statique. Chapitre 03 : Moment statique et moment l’inertie d’une surface. Chapitre 04 : La traction simple. Chapitre 05 : la compression simple. Chapitre 06 : Le Cisaillement simple. Chapitre 07 : La Torsion simple. Chapitre 08 : La Flexion simple. Chapitre 09 : Les Sollicitations composées. Chapitre 10 : Le Flambement .

7
Résistance des Matériaux
Bibliographie Résistance des Matériaux (cours et exercices corrigés)., Jean-Claude DOUBRÉRE ., Eyrolles 2010. Résistance des Matériaux ., R. BASQUIN et G. LEMASSON., Librairie Delagrave 1964. Mécanique des Matériaux., Charles MASSONNET et Serge CESCOTTO., Eyrolles 1992.
., Jean-Claude DOUBRÉRE ., Eyrolles Résistance des Matériaux ., R. BASQUIN et G. LEMASSON., Librairie Delagrave Mécanique des Matériaux., Charles MASSONNET et Serge CESCOTTO., Eyrolles")
8
Chapitre 1 : Introduction à la Résistance des Matériaux.
1. Définition La Résistance des Matériaux est la science du dimensionnement. Elle est issue d’une théorie plus générale, la Mécanique des Milieux Continus, qui permet de concevoir une pièce mécanique, un ouvrage d’art ou tout objet utilitaire. Ces derniers doivent être conçue tenant compte de trois facteurs primordiales (résistance, déformation et stabilité ou équilibre). Elle permet de définir les formes, les dimensions et les matériaux des pièces mécaniques de façon à maîtriser leur résistance, leur déformation tout en optimisant leur coût.
. Elle permet de définir les formes, les dimensions et les matériaux des pièces mécaniques de façon à maîtriser leur résistance, leur déformation tout en optimisant leur coût.")
9
Chapitre 1 : Introduction à la Résistance des Matériaux.
2. Objectif de RDM La résistance des matériaux est étroitement associée à la statique. Celle-ci traite de l’équilibre des corps solides supposés indéformable sous l’action des forces qui les sollicites. L’RDM est l'étude de la résistance et de la déformation des solides. Elle permet de définir les formes, les dimensions et les matériaux des pièces mécaniques de façon à maîtriser leur résistance, leur déformation tout en optimisant leur coût.

10
Chapitre 1 : Introduction à la Résistance des Matériaux.
Exemples: Un pont est vérifié en résistance des matériaux pour: - Assurer sa résistance sous son propre poids et celui des véhicules ; - Assurer sa résistance en cas de forte tempête. - Assurer la stabilité vis-à-vis le renversement. Une bouteille est vérifiée en résistance des matériaux pour: - Assurer sa résistance lorsqu'elle est pleine ; - Assurer une résistance minimum en cas de chute ; - Minimiser l'épaisseur de la bouteille pour faire des économies sur la matière première.

11
Chapitre 1 : Introduction à la Résistance des Matériaux.
3. Hypothèse Générale Pour faire une étude de résistance des matériaux, nous avons besoin de faire des hypothèses simplificatrices. Une fois que ces hypothèses sont définies, nous pouvons nous lancer dans l'étude. 3-1 Hypothèses sur le matériau : Le matériau est supposé continu (ni fissures ni cavités), homogène (tous les éléments du matériau ont une structure identique) et isotrope (en tout point et dans toutes les directions, le matériau possède les mêmes caractéristiques mécaniques).
, homogène (tous les éléments du matériau ont une structure identique) et isotrope (en tout point et dans toutes les directions, le matériau possède les mêmes caractéristiques mécaniques).")
12
Chapitre 1 : Introduction à la Résistance des Matériaux.
3-2 Hypothèses sur la géométrie des solides : La RDM étudie uniquement des solides en forme de poutres (solide idéal) présentant : des dimensions longitudinales importantes par rapport aux dimension: transversales. des sections droites constantes ou variables lentement en dimension ou en forme. Une poutre est engendrée par la translation d'une section droite et plane S dont le barycentre G décrit une ligne Lm (appelée ligne moyenne) droite ou à grand rayon de courbure. La section droite S reste toujours perpendiculaire à la ligne moyenne C. (Figure 1).
 présentant : des dimensions longitudinales importantes par rapport aux dimension: transversales. des sections droites constantes ou variables lentement en dimension ou en forme. Une poutre est engendrée par la translation d une section droite et plane S dont le barycentre G décrit une ligne Lm (appelée ligne moyenne) droite ou à grand rayon de courbure. La section droite S reste toujours perpendiculaire à la ligne moyenne C. (Figure 1).")
13
Chapitre 1 : Introduction à la Résistance des Matériaux.
Figure 1

14
Chapitre 1 : Introduction à la Résistance des Matériaux.
3-3 Hypothèses sur les déformations (Hypothèse de Navier-Bernoulli) : Les sections planes et droites (normales à la ligne moyenne) avant déformation restent planes et droites après déformation. Chapitre 1 : Introduction à la Résistance des Matériaux. 3-3 Hypothèses de Navier-Bernoulli sur les déformations : Les sections planes et droites (normales à la ligne moyenne) avant déformation restent planes et droites après déformation. 4. Notion de Contrainte F F
 : Les sections planes et droites (normales à la ligne moyenne) avant déformation restent planes et droites après déformation. Chapitre 1 : Introduction à la Résistance des Matériaux. 3-3 Hypothèses de Navier-Bernoulli sur les déformations : Les sections planes et droites (normales à la ligne moyenne) avant déformation restent planes et droites après déformation. 4. Notion de Contrainte. F. F.")
15
Chapitre 1 : Introduction à la Résistance des Matériaux.
F =Dl/l = F/A Élasticité Plasticité FP F Dl FR FE F Dl K Rupture

16
Diagramme contrainte-déformation de la fonte (matériau fragile)
Chapitre 1 : Introduction à la Résistance des Matériaux. s = S N e D L O Elasticité Plasticité Diagramme contrainte-déformation de la fonte (matériau fragile)
")
17
Diagramme contrainte-déformation
Chapitre 1 : Introduction à la Résistance des Matériaux. Diagramme contrainte-déformation du Marbre s = S N e D L O Elasticité slim2 slim1 Islim1I slim2

18
Diagramme contrainte-déformation
Chapitre 1 : Introduction à la Résistance des Matériaux. s = S N e D L O Elasticité slim1 slim2 Islim1I slim2 Diagramme contrainte-déformation du Béton

19
Chapitre 1 : Introduction à la Résistance des Matériaux.
Les bases de la théorie de l’élasticité linéaire (réversibilité et proportionnalité des déformations aux efforts) ont été énoncées par Robert Hooke (Méca., Phy., Biolo. et Astro. Anglais ) en 1678. Remarque 1: D’après le diagramme contrainte-déformation de l’acier la contrainte varie en fonction de la déformation dans la zone élastique selon une loi linéaire est réversible.
 ont été énoncées par Robert Hooke (Méca., Phy., Biolo. et Astro. Anglais ) en Remarque 1: D’après le diagramme contrainte-déformation de l’acier la contrainte varie en fonction de la déformation dans la zone élastique selon une loi linéaire est réversible.")
20
Chapitre 1 : Introduction à la Résistance des Matériaux.
L’ordre de grandeur du module d’Young varie de MPa à MPa (1MPa=1N/mm2). Remarque 2: L'expérience montre que la diminution de la section transversale lors de la traction est proportionnelle à l'allongement de la barre d’essai. est le module de Poisson (math français ). ou module de compression transversale.
. Remarque 2: L expérience montre que la diminution de la section transversale lors de la traction est proportionnelle à l allongement de la barre d’essai. est le module de Poisson (math français ). ou module de compression transversale.")
21
Chapitre 1 : Introduction à la Résistance des Matériaux.
1/2 Pour un matériau homogène on a:

22
Chapitre 1 : Introduction à la Résistance des Matériaux.
partie de la structure élément infinitésimale

23
Chapitre 1 : Introduction à la Résistance des Matériaux.
élément infinitésimale élément infinitésimale simplifié

24
Chapitre 1 : Introduction à la Résistance des Matériaux.

25
Chapitre 1 : Introduction à la Résistance des Matériaux.

26
Chapitre 1 : Introduction à la Résistance des Matériaux.

27
Chapitre 1 : Introduction à la Résistance des Matériaux.

28
I.2 Notions de force et de moment
I.2.1 Force Une force est un phénomène qui : soit modifie le mouvement de l'objet qui la subit, soit déforme l'objet sur lequel elle agit. On distingue deux catégories de forces : Les forces de contact (concentrée, linéaire, surfacique), Les forces à distance (attraction magnétique, terrestre…).
, Les forces à distance (attraction magnétique, terrestre…).")
29
I.2 Notions de force et de moment
Une force est modélisée par un vecteur et est caractérisée par 4 paramètres : A un point d’application A, une direction, 2 1 un sens, une intensité, F2/1 L’unité utilisée est le Newton (N). représente l’action mécanique exercée en A par le solide 2 sur le solide 1 F2/1
. représente l’action mécanique exercée en A par le solide 2 sur le solide 1. F2/1.")
30
I.2 Notions de force et de moment
I.2.2 Moment Le moment d’un vecteur par rapport à un point est défini par : Algébriquement, le moment de la force par rapport au point B vaut : Avec d = BA.sinq L’unité utilisée est le Newton-mètre (N.m).
.")
31
I.3 Principe des actions mutuelles
Soient deux solides 1 et 2 en contact au point A : Si le solide 1 exerce en A une action sur le solide 2, réciproquement le solide 2 exerce une action en A sur le solide 1, égale et directement opposée à (principe de l’action et de la réaction).
.")
32
I.4 Principe fondamental de la statique
Un solide indéformable, sollicité par un système de forces extérieures, est en équilibre si et seulement si : la résultante générale de ces forces est nulle, le moment résultant de ces forces par rapport à un point M quelconque est nul. NB: le choix du point M est uniquement guidé par des raisons de commodité.

33
I.4 Principe fondamental de la statique
Equations d’équilibre Système 3D (Oxyz) Système 2D (Oxy) R=0 S proj. sur Ox des Fext=0 S proj. sur Oy des Fext=0 S proj. sur Oz des Fext=0 MR/M=0 S moments/ Ox des Fext=0 S moments/ Oy des Fext=0 S moments/ Oz des Fext=0
 Système 2D (Oxy) R=0. S proj. sur Ox des Fext=0. S proj. sur Oy des Fext=0. S proj. sur Oz des Fext=0. MR/M=0. S moments/ Ox des Fext=0. S moments/ Oy des Fext=0. S moments/ Oz des Fext=0.")
34
I.5 Les actions de liaison
Dans le plan Oxy, un point a trois degrés de liberté : 2 degrés de liberté en translation suivant les axes Ox et Oy, 1 degré de liberté en rotation autour de l’axe Oz. Toute liaison supprimera 1, 2 ou 3 degrés de liberté. Nous allons présenter les trois principaux types de liaisons dans le plan Oxy.

35
I.5 Les actions de liaison
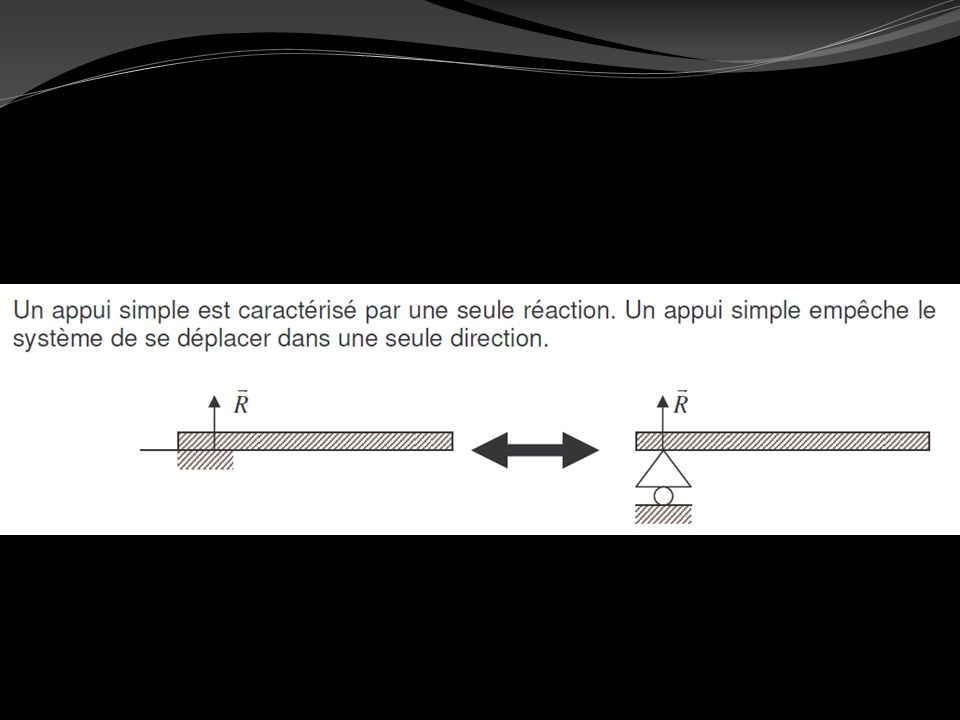
I.5.1 L’appui simple Un système matériel S1 est en appui simple sur un système matériel S2 si le contact peut être supposé ponctuel ou suivant une arête, et a lieu sans frottement. L’appui simple impose un seul blocage en translation dans la direction normale à la surface d’appui. Il fait ainsi naître une force de liaison dans cette direction.

36
I.5 Les actions de liaison
I.5.1 L’appui simple YA La force de liaison a les caractéristiques suivantes : Point d’application A, Droite d’action perpendiculaire à la surface d’appui, Composante YA inconnue. L’appui simple introduit donc 1 inconnue.

41
I.5 Les actions de liaison
I.5.2 L’articulation Elle impose deux blocages en translation suivant les axes Ox et Oy, et la rotation reste libre. L’articulation fait donc naître les deux composantes de la force de liaison.

42
I.5 Les actions de liaison
I.5.2 L’articulation XA YA La force de liaison a les caractéristiques suivantes : Point d’application A, Composantes XA et YA inconnues. L’articulation introduit donc 2 inconnues (XA et YA).
.")
46
I.5 Les actions de liaison
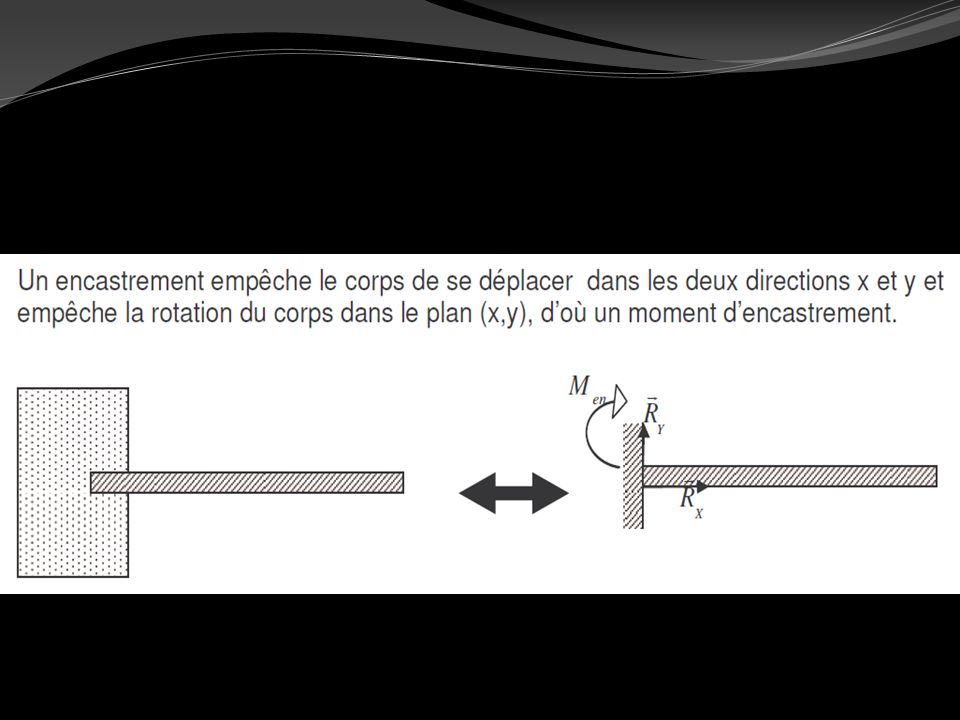
I.5.2 L’encastrement Il impose trois blocages (les deux translations et la rotation). Les deux blocages en translation font naître les deux composantes de la force de liaison. Le blocage en rotation fait naître le moment d’encastrement.
. Les deux blocages en translation font naître les deux composantes de la force de liaison. Le blocage en rotation fait naître le moment d’encastrement.")
47
I.5 Les actions de liaison
I.5.2 L’encastrement YA XA Les actions de liaison ont les caractéristiques suivantes : Point d’application A, Composantes XA et YA de la force de liaison inconnues, Moment d’encastrement MeA inconnu. L’encastrement introduit donc 3 inconnues (XA, YA et MeA).
.")
50
I.6 Isostaticité – Hyperstaticité
Dans le cas plan, on a au plus trois équations d’équilibre. Si les actions de liaison introduisent 3 inconnues, le problème est statiquement déterminé (possible, n’admettant qu’une solution) ou isostatique. Si les actions de liaison introduisent plus de 3 inconnues, le problème est statiquement indéterminé ou hyperstatique. Il faudra introduire de nouvelles équations issues de la RDM. Si les actions de liaison introduisent moins de 3 inconnues, le problème est hypostatique. La structure est alors appelée mécanisme et n’est pas stable.
 ou isostatique. Si les actions de liaison introduisent plus de 3 inconnues, le problème est statiquement indéterminé ou hyperstatique. Il faudra introduire de nouvelles équations issues de la RDM. Si les actions de liaison introduisent moins de 3 inconnues, le problème est hypostatique. La structure est alors appelée mécanisme et n’est pas stable.")
52
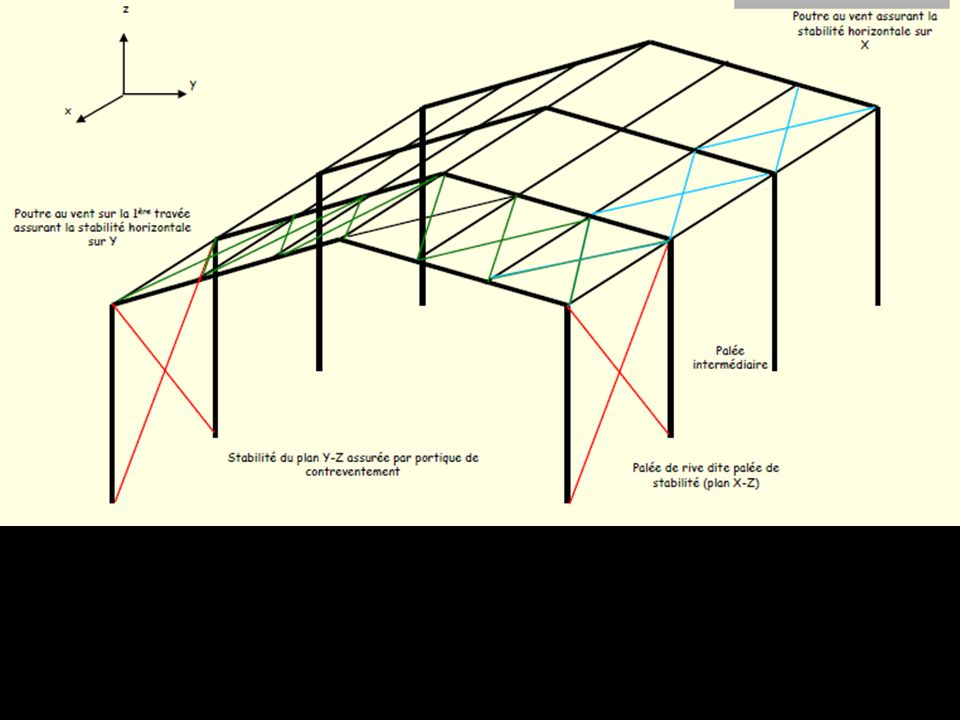
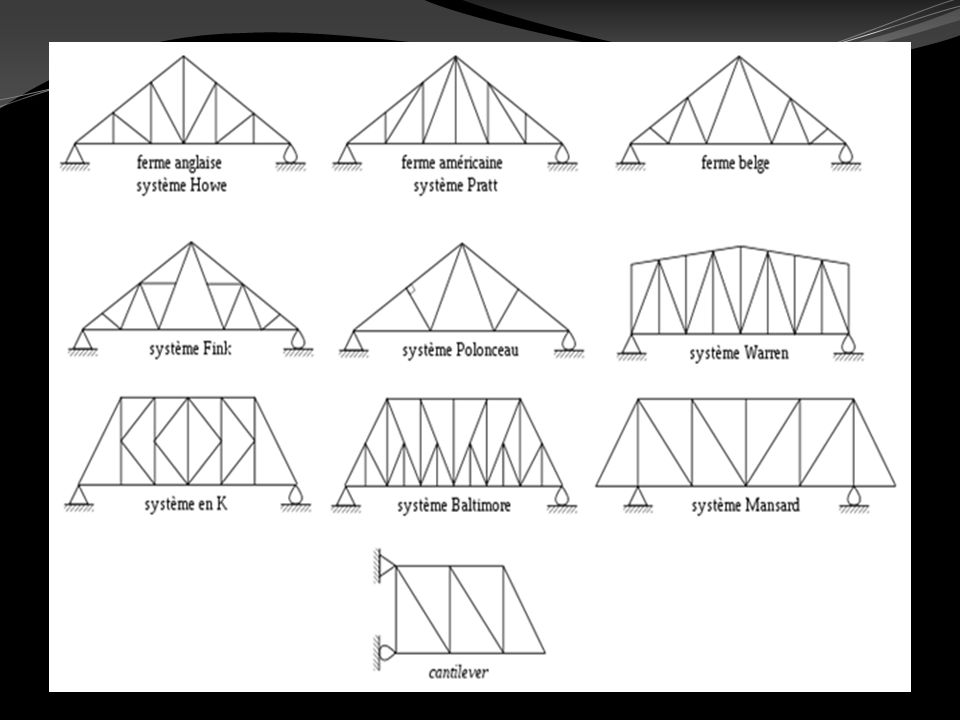
éléments de réduction sur une poutre TREILLES OU SYSTEMES TRIANGULÉS
Chapitre 2 : Equilibre interne, éléments de réduction sur une poutre TREILLES OU SYSTEMES TRIANGULÉS

58
2.1 Actions de liaison Une structure est souvent formée d’un ensemble de sous-structures assemblées entre elles par des liaisons. Ces liaisons assurent un blocage relatif de deux sous-structures (ou plus)
")
59
En 2D on distingue: La liaison articulée simple sont caractérisée par une rotation relative libre des deux extrémités de barres et pas de translation relative des deux extrémités de barres (translation nulle).
.")
60
Dans le cas de deux barres, l’effort de liaison est réduit à une force ( deux composantes ou deux inconnues) Attention à la représentation de cette force de liaison, elle n’apparaît que lorsque la structure est coupée R α Ry Rx ou

61
Ne jamais représenter les deux solides liés avec les efforts

62
Dans ce cas les inconnues de liaison sont plus difficiles à calculer.
La liaison articulée multiple: plus de deux solides sont liés entre eux au niveau de cette articulation, une rotation relative libre des extrémités de toutes les barres liées à l’articulation. une translation relative nulle des extrémités de toutes les barres liées à l’articulation. Dans ce cas les inconnues de liaison sont plus difficiles à calculer.

63
Prenons l’exemple d’une liaison articulée à 3 barres
R2y

64
On peut la transformer en
R1y R1x R2y R1x R1y R2x R2x R2y

65
On peut ajouter R1x et R1y d’une part et R2x et R2y
Avec R3y = R1y + R2y et R3x = R1x + R2x R2y Il y a 4 inconnues de liaisons avec 3 barres si Nb est le nombre de barres liées au niveau de l’articulation le nombre d’inconnues de liaison sera 2(Nb - 1)
")
66
Si la liaison articulée est fixée sur un appui le nombre d’inconnues de liaison se calcule ainsi:
2 2 1 2 2 2 inconnues 4 inconnues 3 inconnues

67
on distingue ensuite : La liaison encastrement simple est caractérisée par 1. une rotation relative nulle des deux extrémités de barres. 2. une translation relative nulle des deux extrémités de barres. Dans le cas de deux barres les efforts de liaison sont composés d’une force (deux composantes) et d’un couple soit 3 inconnues de liaison
 et d’un couple soit 3 inconnues de liaison.")
68
Ne jamais représenter les deux solides liés avec les efforts
Attention comme dans le cas précédent les efforts de liaison n’apparaissent que lorsque la structure est coupée R α M ou Ry Rx M Ne jamais représenter les deux solides liés avec les efforts

69
La liaison encastrée multiple: plus de deux solides sont liés entre eux au niveau de cette liaison
1. une rotation relative nulle des extrémités de toutes les barres liées à l’articulation 2. une translation relative nulle des extrémités de toutes les barres liées à l’articulation si Nb est le nombre de barres liées au niveau de la liaison encastrée le nombre d’inconnues de liaison sera 3(Nb - 1)
")
70
Si la liaison encastrée est fixée sur un appui le nombre d’inconnues de liaison se calcule ainsi:
3 3 3 2 1 3 3 5 inconnues 3 inconnues 6 inconnues 4 inconnues

71
2 Degré d’hyperstaticité d’un système
Un système est hyperstatique lorsque le nombre d’équations issues du principe fondamental de la statique est inférieur au nombre d’inconnues de liaison Le degré d’hyperstaticité correspond à la différence entre le nombre d’inconnues de liaison et le nombre d’équations, il est indépendant du chargement. Pour déterminer le degré d’hyperstaticité d’un système il faut : 1. Compter le nombre de barres, soit n ce nombre en déduire le nombre d’équations de la statique 3n (trois équations par barre pour un cas plan) 2. Calculer le nombre d’inconnues de liaison par la méthode indiquée en 2.1, soit i ce nombre
 2. Calculer le nombre d’inconnues de liaison par la méthode indiquée en 2.1, soit i ce nombre.")
72
Si i < 3n le système est hypostatique, c’est un mécanisme
Si i = 3n le système est isostatique, les équations de la statique sont suffisantes pour calculer les inconnues de liaison. Ce sont les structures que nous étudierons cette année. Si i > 3n le système est hyperstatique, les équations de la statique ne sont plus suffisantes pour calculer les inconnues de liaison. Il faut écrire d’autres équations pour résoudre le problème. Le degré d’hyperstaticité vaut i – 3n

73
Voyons quelques exemples de détermination du degré d’hyperstaticité sur des structures
3 2 Nb d’inconnues de liaison 3+2+2 = 7 Nb d’équations 3*2 = 6 Hyperstatique de degré 1 3 2 Nb d’inconnues de liaison 3+2+3 = 8 Nb d’équations 3*2 = 6 Hyperstatique de degré 2

74
3 Nb d’inconnues de liaison 3+3+3 = 9 Nb d’équations 3*2 = 6 Hyperstatique de degré 3 2 Nb d’inconnues de liaison 2+2+2 = 6 Nb d’équations 3*2 = 6 Isostatique portique à trois articulations

75
2 3 Nb d’inconnues de liaison = 9 Nb d’équations 3*3 = 9 Isostatique 3 Nb d’inconnues de liaison = 12 Nb d’équations 3*3 = 9 Hyperstatique de degré3

76
2 3 Nb d’inconnues de liaison = 13 Nb d’équations 3*4 = 12 Hyperstatique de degré 1 arbalétrier Portique simple articulé en pied

77
On peut aussi reprendre le problème en considérant que les 4 barres ne forment qu’un seul solide
Nb d’inconnues de liaison 2+2 = 4 Nb d’équations 3*1 = 3 Hyperstatique de degré 1 2

78
Voici un autre type de portique
Nb d’inconnues de liaison si on considère un ensemble de 3 barres = 10 Nb d’équations 3*3 = 9 Hyperstatique de degré 1 3 2 Poteau en béton Portique

79
On peut aussi prendre le problème différemment, en ne considérant que deux solides
Nb d’inconnues de liaison si on considère un ensemble de 2 solides 3+2+2 = 7 Nb d’équations 3* 2 = 6 Hyperstatique de degré 1 3 2 On retrouve le même résultat

81
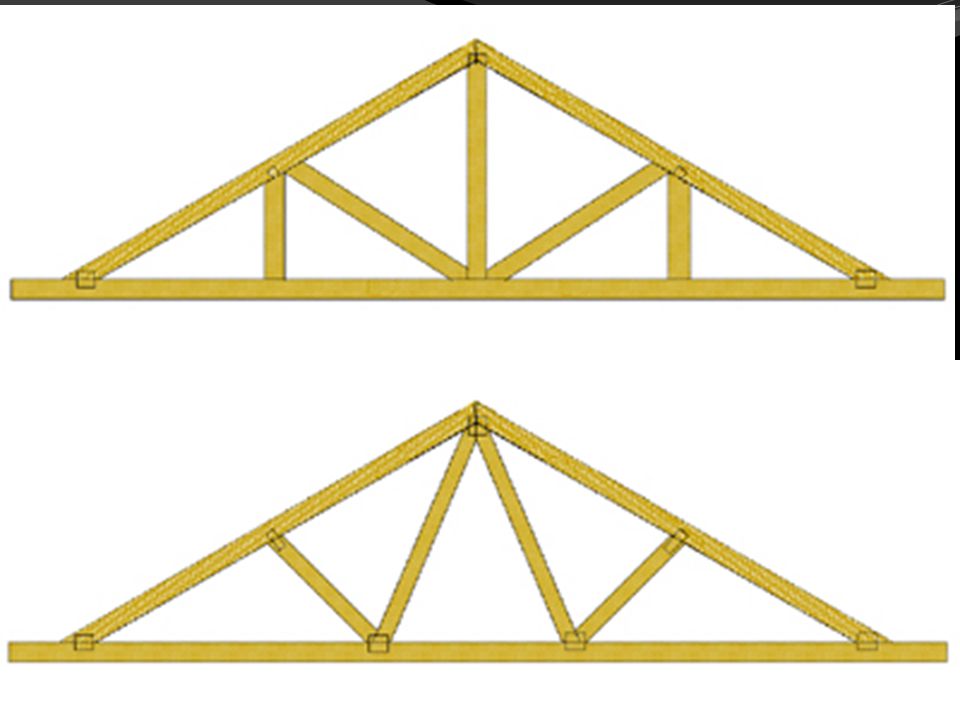
Les Treillis Hypothèses
- Les assemblages sont supposés géométriquement invariables. - Toutes les forces sont supposées contenues dans le plan de la structure. - Le poids des barres est négligé. Les forces agissent sur les nœuds. Les nœuds sont supposés équivalents à des liaisons pivots. Remarque : compte tenu des ces hypothèses, les barres sont soumises soit à la traction, soit à la compression.

82
2 6 Nb d’inconnues de liaison = 28 Nb d’équations 3*7 = 21 Hyperstatique de degré 7 1 9 Nb d’inconnues de liaison = 21 Nb d’équations 3*7 = 21 Isostatique 1 2 4 6 Treillis plan isostatique

83
Nb d’inconnues de liaison
= 15 Nb d’équations 3*4 = 12 Hyperstatique de degré 3 1 3 2 Si on fait une coupure complète d’une barre on retrouve un système isostatique 3 3 Nb d’inconnues de liaison = 15 Nb d’équations 3*5 = 15 3 3 1 2 Si on fait une coupure complète d’une barre on libère trois degrés de liberté

84
Les inconnues de notre problème sont les b efforts normaux dans les barres et les r réactions d’appuis. L’étude d’un treillis se fait par l’équilibre de chaque nœud. Les équations d’équilibre de la statique sont au nombre de deux (résultantes sur x et sur y, pas d’équation de moments puisque les barres sont concourantes au nœud). L’équilibre des n nœuds du treillis donne donc 2n équations. Soit h, le degré d’hyperstatisme du treillis, défini de la manière suivante: h = b+r-2n
. L’équilibre des n nœuds du treillis donne donc 2n équations. Soit h, le degré d’hyperstatisme du treillis, défini de la manière suivante: h = b+r-2n.")
85
h = b+r-2n Si h = 0, le treillis est isostatique. Si h > 0, le treillis est hyperstatique. Si h < 0, le treillis est hypostatique

86
Résolution d’un treillis
Déterminer h le degré d’hyperstatisme de la structure, Si h=0, la est structure isostatique, on peut la résoudre, Calcul des réactions d’appuis, Détermination des efforts et de la nature des sollicitations dans toutes les barres. On peut employer la méthode des nœuds ou celle de Crémona. On pourra récapituler les résultats dans un tableau.

87
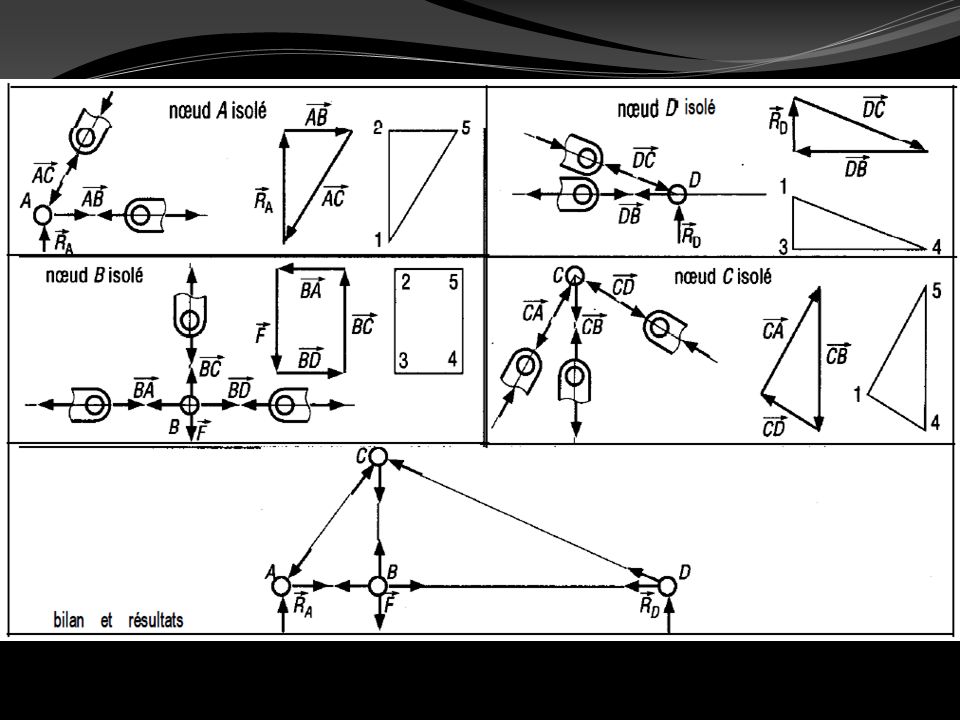
Méthode des nœuds On peut résoudre un treillis en procédant progressivement, nœud par nœud, c’est à dire en écrivant l’équilibre d’un nœud préalablement isolé. Cette méthode, dont l’objectif est la détermination des actions dans-toutes les barres d’une même structure, consiste à étudier l’équilibre des nœuds successifs en appliquant le principe fondamental de la statique.

89
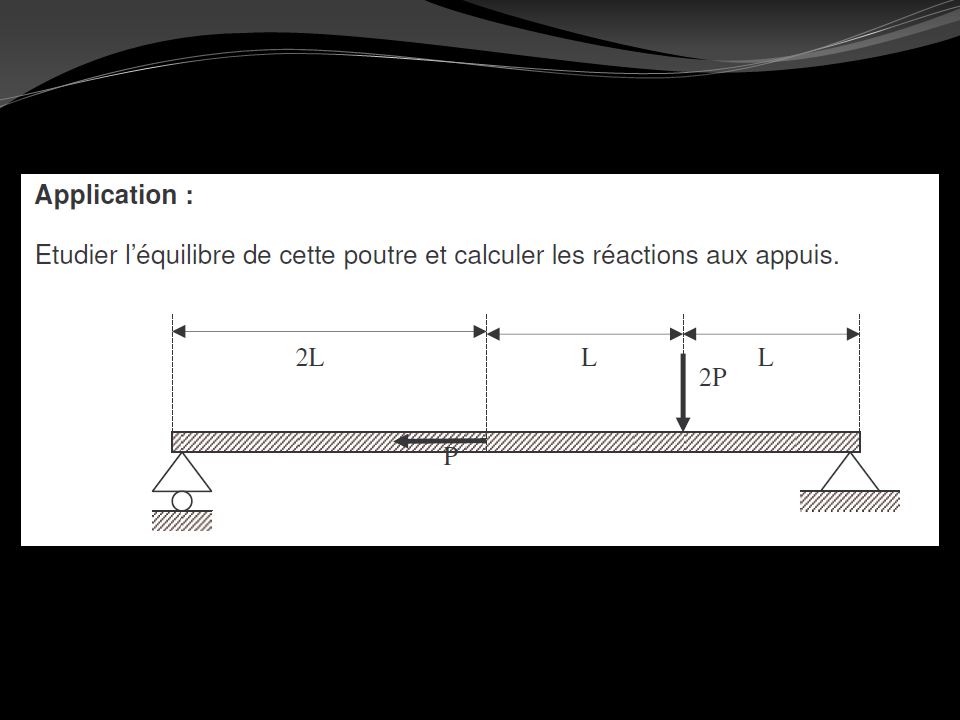
2.3 Exemples de calculs d’actions de liaison
8kN/ml C A B 1m D 2m E 12kN/ml 1m 3m Vérifier l’isostaticité du système Calculer les actions de liaisons en A B C D et E

92
III –Méthode de Crémona
La méthode consiste à construire et à rassembler sur une même figure (appelée Crémona), tous les triangles ou polygones de forces obtenus par l’étude des équilibres des nœuds successifs de la structure. Remarque : pour un même nœud, il ne doit pas y avoir plus de deux actions (modules) inconnues pour aboutir à un résultat. Dans le cas contraire, isoler d’autres nœuds, au besoin utiliser la méthode des sections pour débloquer une étude. Tracé d’un Crémona (reprenons l’exemple du paragraphe précédent). La structure est divisée en régions. Les forces extérieures à la structure et les barres sont les frontières entre les différentes régions. Le tracé du Crémona est effectué au fur et à mesure de l’étude graphique de l’équilibre des nœuds successifs.
, tous les triangles ou polygones de forces obtenus par l’étude des équilibres des nœuds successifs de la structure. Remarque : pour un même nœud, il ne doit pas y avoir plus de deux actions (modules) inconnues pour aboutir à un résultat. Dans le cas contraire, isoler d’autres nœuds, au besoin utiliser la méthode des sections pour débloquer une étude. Tracé d’un Crémona (reprenons l’exemple du paragraphe précédent). La structure est divisée en régions. Les forces extérieures à la structure et les barres sont les frontières entre les différentes régions. Le tracé du Crémona est effectué au fur et à mesure de l’étude graphique de l’équilibre des nœuds successifs.")
93
Il est indispensable de choisir une échelle des forces pour réaliser les constructions :
La région 1 est limitée par Ra, Rd, AC, CD. La région 2 est limitée par Ra , F , AB. La région 3 est limitée par F , Rd , BD. La région 4 est limitée par BC, CD, DB. La région 5 est limitée par AB , BC , CA C 1 1 5 4 A B D F Rd Ra 3 2

94
Lorsque l’on tourne autour du nœud A dans le sens trigonométrique, l’on rencontre successivement
les régions À ces régions correspondent les actions 1-2 (Ra) ; 2-5 (barre AB) ; 5-l (barre AC). L’équilibre du nœud permet le tracé des segments l-2, 2-5, 5-l du graphe. Le point 5 est déduit par construction. Au nœud B correspond les régions Les actions correspondantes sont : 2-3 (F), 3-4 (barre BD), 4-5(barre BC), 5-2 (barre AB). L’équilibre du nœud permet le tracé des segments 2-3, 3-4, 4-5, 5-2 du graphe. Le point 4 est déduit par construction Même procédé pour les nœuds D (3-l-4) et C (l-5-4). Le tracé définitif est obtenu lorsque tous les nœuds ont été étudiés et dessinés.
 ; 2-5 (barre AB) ; 5-l (barre AC). L’équilibre du nœud permet le tracé des segments l-2, 2-5, 5-l du graphe. Le point 5 est déduit par construction. Au nœud B correspond les régions Les actions correspondantes sont : 2-3 (F), 3-4 (barre BD), 4-5(barre BC), 5-2 (barre AB). L’équilibre du nœud permet le tracé des segments 2-3, 3-4, 4-5, 5-2 du graphe. Le point 4 est déduit par construction Même procédé pour les nœuds D (3-l-4) et C (l-5-4). Le tracé définitif est obtenu lorsque tous les nœuds ont été étudiés et dessinés.")
95
Remarque : la méthode des nœuds peut être utilisée sans faire de Crémona.
Cependant, au-delà de 7 à 8 nœuds, la construction d’un Crémona simplifie le travail et diminue le temps d’étude. Si les barres sont très nombreuses préférer les logiciels.

Présentations similaires