Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
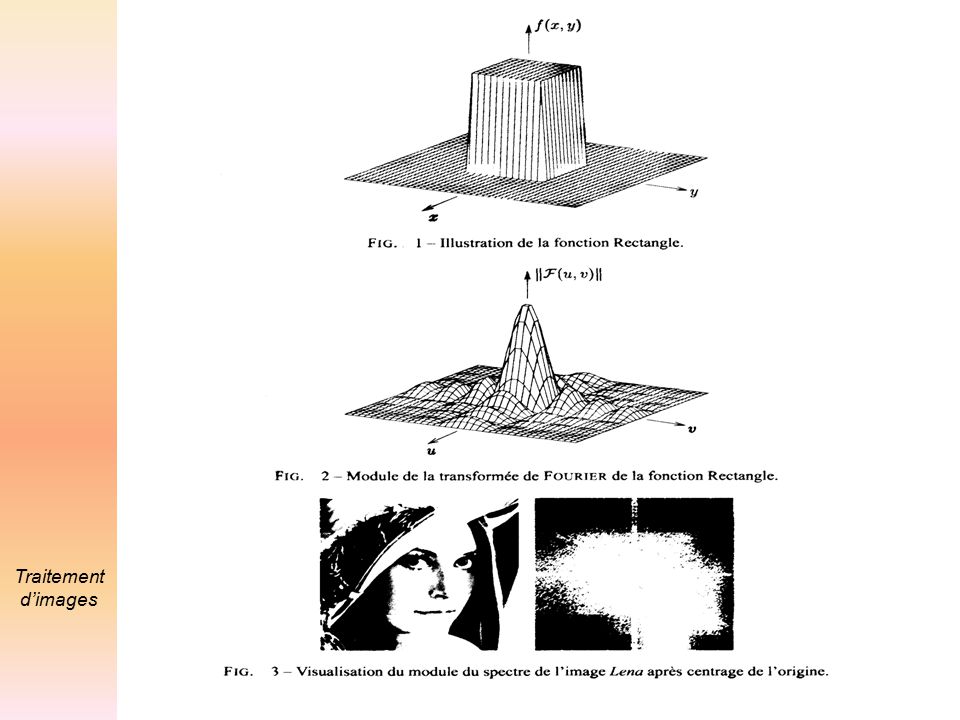
Traitement d’images Prétraitements

2
« Sé koi ? » On entend par prétraitements des opérations effectuées sur l’image pour soit l’améliorer, soit la restaurer, i.e. restituer aussi fidèlement que possible le signal d’origine. Amélioration visuelle Réduction de l’information inutile (bruit) Renforcement de l’information utile Prétraitements Restauration (débruitage par ex.) Amélioration (modification de la dynamique par ex.)
 Renforcement de l’information utile. Prétraitements. Restauration. (débruitage par ex.) Amélioration. (modification de la. dynamique par ex.)")
3
Restauration Objet : la réduction, voire l'élimination des distorsions introduites (bruits) par le système ayant servi à acquérir l'image. But : obtenir une image qui soit la plus proche possible de l'image idéale qui aurait été obtenue si le système d'acquisition était parfait.

4
Restauration Nature du bruit Bruit lié au contexte de l'acquisition Bruit lié au capteur Bruit lié à l'échantillonnage Bruit lié à la nature de la scène

5
Autres dégradations visibles dans une image:
bruit "poivre-et-sel" (très localisé et très perturbant) ; bruit de "speckle " (chatoiement; bruit granulaire de type multiplicatif); trous ou coupures sur une forme et des frontières pas nettes (dents de scie). Traitement local associé ou non à une connaissance a priori et a posteriori de la forme peut donner de bons résultats. Remarque: On peut tenter de modéliser le processus de dégradation pour l’inverser (restauration) ou Agir directement sur l'image obtenue (amélioration). Dans ce cas le modèle de restauration retenu est linéaire et se traduit par une transformation de voisinage
 ; bruit de speckle (chatoiement; bruit granulaire de type multiplicatif); trous ou coupures sur une forme et des frontières pas nettes. (dents de scie). Traitement local associé ou non à une connaissance a priori et a posteriori de la forme peut donner de bons résultats. Remarque: On peut tenter de modéliser le processus de dégradation pour l’inverser (restauration) ou Agir directement sur l image obtenue (amélioration). Dans ce cas le modèle de restauration retenu est linéaire et se traduit par une transformation de voisinage.")
6
Restauration Original Salt and pepper Gaussien Speckle

7
Restauration Dégradations
Dans l'ensemble des dégradations possibles d'une image, il existe une classe intéressante : les transformations linéaires. Dans ce cas, on suppose les dégradations invariantes spatialement ce qui permet d'écrire le modèle suivant : Image à restaurer Image initiale Bruit additif réponse impulsionnelle du système linéaire modèle de la source de dégradation

8
d'où Fd(wX,wY) = H(wX,wY) . Fi(wX,wY) + B(wX,wY)
Restauration Filtrage Si h et b sont connus et si dégradation linéaire et invariante par translation : fd(x,y) = [ h*fi ] (x,y) + b (x,y) d'où Fd(wX,wY) = H(wX,wY) . Fi(wX,wY) + B(wX,wY) En l’absence de bruit additif : Restauration par inversion du phénomène de dégradation grâce à la TdF et à sa propriété de transformation du produit de convolution en produit fréquentiel G(wX,wY) = 1 / H(wX,wY) Si le bruit b existe : application de la TdF mais plus complexe
 = [ h*fi ] (x,y) + b (x,y) d où Fd(wX,wY) = H(wX,wY) . Fi(wX,wY) + B(wX,wY) En l’absence de bruit additif : Restauration par inversion du phénomène de dégradation grâce à la TdF et à sa propriété de transformation du produit de convolution en produit fréquentiel. G(wX,wY) = 1 / H(wX,wY) Si le bruit b existe : application de la TdF mais plus complexe.")
9
Restauration Filtrage Si bruit et signal sans forme analytique, caractérisation par leurs propriétés statistiques Les filtres les plus connus : Filtre de Wiener : estimation par les moindres carrés (résultats moyens) Filtre de Hunt : variante du filtre de Wiener Filtre à moyenne géométrique
 Filtre de Hunt : variante du filtre de Wiener. Filtre à moyenne géométrique.")
10
Transformée de Fourier

11
Transformée de Fourier (suite)
En général F(u,v) est une fonction à valeurs complexes : F(u,v) =M(u,v)ejq(u,v) M(u,v) = ||F(u,v)|| module ou spectre fréquentiel de l’image Q(u,v) spectre de phase de F(u,v)
 est une fonction à valeurs complexes : F(u,v) =M(u,v)ejq(u,v) M(u,v) = ||F(u,v)|| module ou spectre fréquentiel de l’image. Q(u,v) spectre de phase de F(u,v)")
13
Transformée de Fourier (suite)
La transformée de Fourier discrète d'un tableau X formé de m lignes et de n colonnes à valeurs dans l'ensemble des nombres complexes est le tableau Y de m lignes et de n colonnes défini par : Y[A,B]=SSa,bX[a,b] e2iP(aA/m + bP/n) / (n,m)1/2 La transformée de Fourier inverse de Y est le tableau X défini par : X[A,B]= SSa,bY[a,b] e-2iP(aA/m + bP/n) / (n,m)1/2
 / (n,m)1/2. La transformée de Fourier inverse de Y est le tableau X défini par : X[A,B]= SSa,bY[a,b] e-2iP(aA/m + bP/n) / (n,m)1/2.")
14
A gauche, un portrait de Claudia Schiffer, à droite son image spectrale.
= logarithme de l'amplitude de la transformée de Fourier. Les points clairs sont les points de haute énergie.

15
Approximations successives de la transformée inverse

16
Amélioration Problème de l'amélioration : un problème subjectif.
Quand pourra-t-on dire qu'une image est améliorée ? Œil humain : essentiellement sensible aux forts contrastes. Techniques d'amélioration tentent d'augmenter ceux-ci pour accroître la séparabilité des régions composant une scène.

17
Amélioration Il existe 2 grandes familles de méthodes : - Les méthodes globales ou ponctuelles Les méthodes locales ou dites de voisinage Les méthodes globales modifient chaque point de l'image en fonction d'une information globale La modification de l'histogramme : égalisation, spécification La modification de l'échelle des niveaux : contrastage, négatif, extraction de bits, découpage de l'intensité, troncature, seuillage

18
ex.: recadrage, linéarisation, amincissement
Amélioration Modification de l’échelle des niveaux de gris Chaque niveau de gris est modifié dans le but d'accroître le contraste (en contrôle qualité, où on a un ou plusieurs objets sur un fond continu uniforme, on s'attache à accroître les transitions objet-fond). opération ponctuelle Type de correction adapté lorsqu'une majeure partie des niveaux de gris présents dans l'image est concentrée dans un faible intervalle sur l'échelle des intensités lumineuses. Fonction prédéfinie ex.: recadrage, linéarisation, amincissement
. opération ponctuelle. Type de correction adapté lorsqu une majeure partie des niveaux de gris présents dans l image est concentrée dans un faible intervalle sur l échelle des intensités lumineuses. Fonction prédéfinie. ex.: recadrage, linéarisation, amincissement.")
19
Amélioration Modification de l’échelle des gris

20
Amélioration Modification de l’échelle des niveaux de gris

21
Amélioration Réhaussement de contraste

22
Amélioration Réhaussement de contraste

23
Amélioration Réhaussement de contraste

24
Amélioration Réhaussement de contraste

25
distribution cumulative
Amélioration Linéarisation de l’histogramme Pour améliorer l'information contenue dans l'image, on utilise une technique appelée linéarisation de l'histogramme. La transformation est construite de telle façon que le nouvel histogramme soit plat (distribution uniforme des niveaux de gris). Cette opération est équivalente à maximiser l'entropie de l'image, on obtient alors théoriquement, une image ayant une information maximale. FDC de g Une linéarisation exacte est pratiquement impossible du fait de la nature discrète de l'histogramme des niveaux de gris. Le plus souvent, la dynamique du nouvel histogramme est plus faible. Fonction de distribution cumulative
. Cette opération est équivalente à maximiser l entropie de l image, on obtient alors théoriquement, une image ayant une information maximale. FDC de g. Une linéarisation exacte est pratiquement. impossible du fait de la nature discrète de. l histogramme des niveaux de gris. Le plus souvent, la dynamique du nouvel. histogramme est plus faible. Fonction de. distribution cumulative.")
26
Linéarisation de l’histogramme
Amélioration Linéarisation de l’histogramme La linéarisation de l'histogramme présente plusieurs avantages : 1. entropie maximum 2. les non-linéarités monotones sont compensées 3. on obtient une image normalisée ce qui permet éventuellement des comparaisons visuelles avec d'autres images (également normalisées). 4. cet algorithme regroupe les classes à faible population et étale les classes à fort effectif. De ce fait, de faibles variations au sein de ces classes vont se retrouver amplifiées, d'où une mise en évidence de détails noyés dans une surface quasi uniforme, mais on perd en définition dans les classes à faible effectif.
. 4. cet algorithme regroupe les classes à faible population et étale les classes à fort effectif. De ce fait, de faibles variations au sein de ces classes vont se retrouver amplifiées, d où une mise en évidence de détails noyés dans une surface quasi uniforme, mais on perd en définition dans les classes à faible effectif.")
27
Soit H(u) l ’histogramme on cherche les niveaux v = F(u)
Amélioration Egalisation d’histogramme Soit H(u) l ’histogramme on cherche les niveaux v = F(u)
 l ’histogramme. on cherche les niveaux v = F(u)")
28
Amélioration Egalisation d’histogramme

29
Image après égalisation
Amélioration Egalisation d’histogramme Image originale Image après égalisation

30
Egalisation d’histogramme
Amélioration Egalisation d’histogramme Image originale Histogramme original Transformation Image après égalisation Histogramme égalisé

31
Amélioration Autres transformation de l’histogramme Les recherches en perception humaine ont montré que l'œil réalise des transformations non linéaires de l'intensité lumineuse. C'est pourquoi on préfère souvent l'hyperbolisation de l'histogramme à la linéarisation.

32
Méthodes locales ou de voisinage
Amélioration Méthodes locales ou de voisinage Elles travaillent localement sur des pixels ou voisinage de pixels Le filtrage fréquentiel : Cependant cette approche, au formalisme simple, met en œuvre des processus de calcul trop lourds pour être réellement applicable (surtout dans un contexte temps-réel). Moyennage sur plusieurs images Le filtrage linéaire par convolution de masque cas particulier : Le filtrage gaussien Lissage directionnel Le filtrage non-linéaire (médian)
. Moyennage sur plusieurs images. Le filtrage linéaire par convolution de masque. cas particulier : Le filtrage gaussien. Lissage directionnel. Le filtrage non-linéaire (médian)")
33
Amélioration Filtrage fréquentiel
Transformée de Fourier d ’une image numérique On peut représenter la partie réelle, la partie imaginaire et le module appelé SPECTRE de FOURIER Filtrage fréquentiel : On multiplie f(u,v) par une fonction de fenêtrage Calcul de la transformée inverse Propriété : multiplier dans le domaine fréquentiel revient à convoluer dans le domaine temporel
 par une fonction de fenêtrage. Calcul de la transformée inverse. Propriété : multiplier dans le domaine fréquentiel revient à convoluer dans le domaine temporel.")
34
Convolution en continu
Amélioration Convolution en continu F: image continue caractérisée par niveau de gris f G: image convoluée de niveau de gris g Niveau de gris après convolution Réponse impulsionnelle de l’opérateur de convolution Niveaux de gris initiaux

35
Opération linéaire de voisinage
Amélioration Convolution en discret opérateur de convolution Niveau de gris après convolution Niveaux de gris initiaux Opération linéaire de voisinage

36
Réponse impulsionnelle
Amélioration Convolution en discret p i h(-1,-1) h0,-1) h(1,-1) h(-1,0) h0,0) h(1,0) h(-1,1) h0,1) h(1,1) q j f(p-1,q-1) f(p,q-1) f(p+1,q-1) f(p-1,q) f(p,q) f(p+1,q) g(p,q) f(p-1,q+1) f(p,q+1) f(p+1,q+1) Image source Réponse impulsionnelle
 h0,-1) h(1,-1) h(-1,0) h0,0) h(1,0) h(-1,1) h0,1) h(1,1) q. j. f(p-1,q-1) f(p,q-1) f(p+1,q-1) f(p-1,q) f(p,q) f(p+1,q) g(p,q) f(p-1,q+1) f(p,q+1) f(p+1,q+1) Image source. Réponse impulsionnelle.")
37
Elément neutre de la convolution
Amélioration Convolution en discret Elément neutre de la convolution 1

38
Réponse impulsionnelle discrète
Amélioration Convolution en discret p 1 h(-2,-2) h(-1,-2) h0,-2) h(1,-2) h(2,-2) h(-2,-1) h(-1,-1) h0,-1) h(1,-1) h(2,-1) h(p,q) h(-2, 0) h(-1,0) h0,0) h(1,0) h(2,0) h(-2,1) h(-1,1) h0,1) h(1,1) h(2,1) H(-2,2) h(-1,2) h0,2) h(1,2) h(2,2) Réponse impulsionnelle discrète
 h(-1,-2) h0,-2) h(1,-2) h(2,-2) h(-2,-1) h(-1,-1) h0,-1) h(1,-1) h(2,-1) h(p,q) h(-2, 0) h(-1,0) h0,0) h(1,0) h(2,0) h(-2,1) h(-1,1) h0,1) h(1,1) h(2,1) H(-2,2) h(-1,2) h0,2) h(1,2) h(2,2) Réponse impulsionnelle discrète.")
39
Exemple de convolution: le filtre moyenneur
Amélioration Convolution en discret Exemple de convolution: le filtre moyenneur 1 1 1 1/9 1 1 1 1 1 1 Filtre moyenneur

40
Propriétés de la convolution
Amélioration Propriétés de la convolution Additivité/distributivité Commutativité Associativité du produit de convolution Norme d’un opérateur Séparabilité d’un opérateur de convolution Un filtre de convolution est dit séparable si 1 2 -1 = -2 Traitement selon y Traitement selon x

41
Filtrage par convolution de masque
Amélioration Filtrage par convolution de masque Transformation de voisinage : Soit W une fenêtre de taille [-m,m] [-n,n]. Image dégradée Image restaurée (lissée) Coefficients de l’opérateur de lissage
 Coefficients de l’opérateur de lissage.")
42
Amélioration Filtrage Le principal problème est bien sûr le choix de l'opérateur de lissage qui doit être lié à la nature du bruit. Souvent, le bruit introduit des hautes fréquences et un simple filtre passe-bas peut quelquefois fortement l'atténuer. Dans ce cas, l'opérateur W sera par exemple un filtre moyenneur.

43
Amélioration Filtrage Moyennage - filtre passe-bas
Laplacien - filtre passe-haut Lissage adaptatif: e.g filtre gradient inverse Lissage min/Max Lissage robuste Afin de préserver les contours, des opérateurs non linéaires = développés. Les deux plus célèbres: filtre médian et filtre SNN.

44
Filtrage linéaire par convolution de masque
Amélioration Filtrage linéaire par convolution de masque Chaque pixel est remplacé par la moyenne pondérée de ses voisins Soit F le masque sur un voisinage V Masque classique : chaque coefficient est de poids 1/n; n étant le nombre de voisins pris en compte Inconvénient : flou

45
Amélioration Principe du filtrage discret Exemples de filtres passe-bas Niveau de gris II 1 2 3 4 5 6 7 9 8 x IF Filtrage

46
Amélioration Cas monodimensionnel et bidimensionnel génèrent un effet de flou Pour limiter l’effet de flou Lissage adaptatif (plus coûteux en temps)
")
47
Filtrage d’ordre Filtrage médian
Amélioration Filtrage d’ordre Filtrage médian Trier les pixels du voisinage par ordre croissant des niveaux de gris Bruit salt and pepper Médian 3x3 Médian 7x7

48
Amélioration Exemples Bruit gaussien Moyenneur 3x3
Filtre adaptatif 3x3 Médian 3x3 Bruit salt and pepper Moyenneur 3x3 Filtre adaptatif 3x3 Médian 3x3

49
Amélioration Exemples Bruit speckle Moyenneur 3x3 Filtre adaptatif 3x3
Médian 3x3

Présentations similaires








 signal.>")



 : I. Propriétés physiques des roches : densités, aimantations induites et.>")


>")



