Télécharger la présentation
1
L’univers technologique
Les mouvements et les forces

2
Les types de mouvements

3
Les types de mouvements
Les scientifiques pensent que tous les mouvements sont des combinaisons des quatre mouvements simples suivants: Le mouvement rectiligne (en ligne droite) Ex. Une planche à roulettes Le mouvement alternatif (en ligne droite dans un sens et dans l’autre) Ex. Un piston de trompette
 Ex. Une planche à roulettes. Le mouvement alternatif (en ligne droite dans un sens et dans l’autre) Ex. Un piston de trompette.")
4
Les types de mouvements
Le mouvement circulaire (en courbe ou cercle) Ex. Un carrousel Le mouvement oscillatoire (en allant et retournant autour d’un point central) Ex. Une balançoire
 Ex. Un carrousel. Le mouvement oscillatoire (en allant et retournant autour d’un point central) Ex. Une balançoire.")
6
Le déclenchement et le ralentissement d’un mouvement
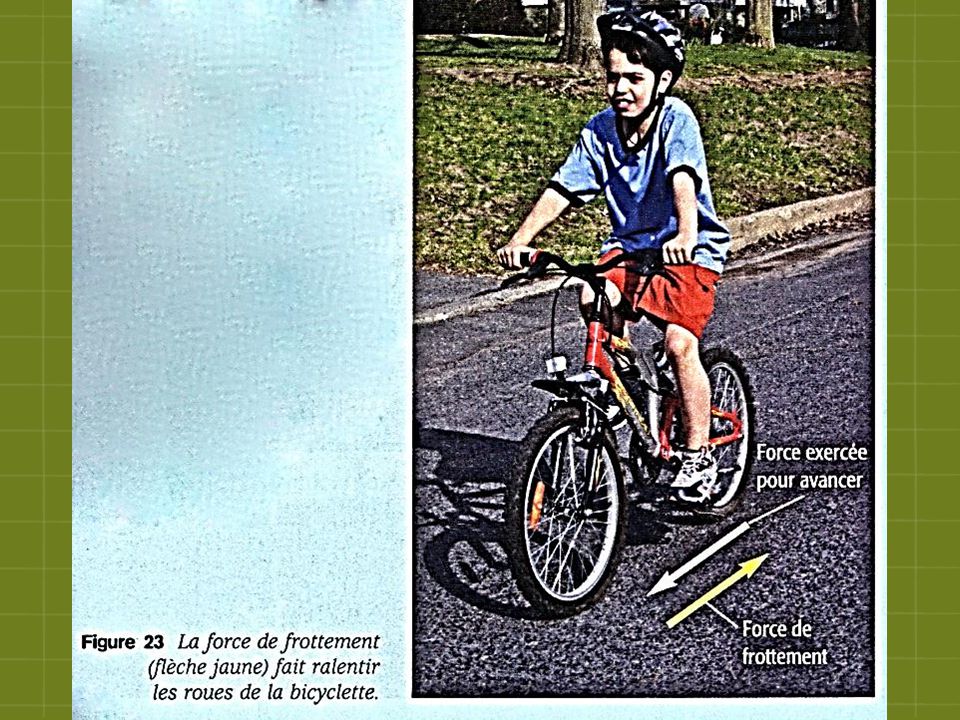
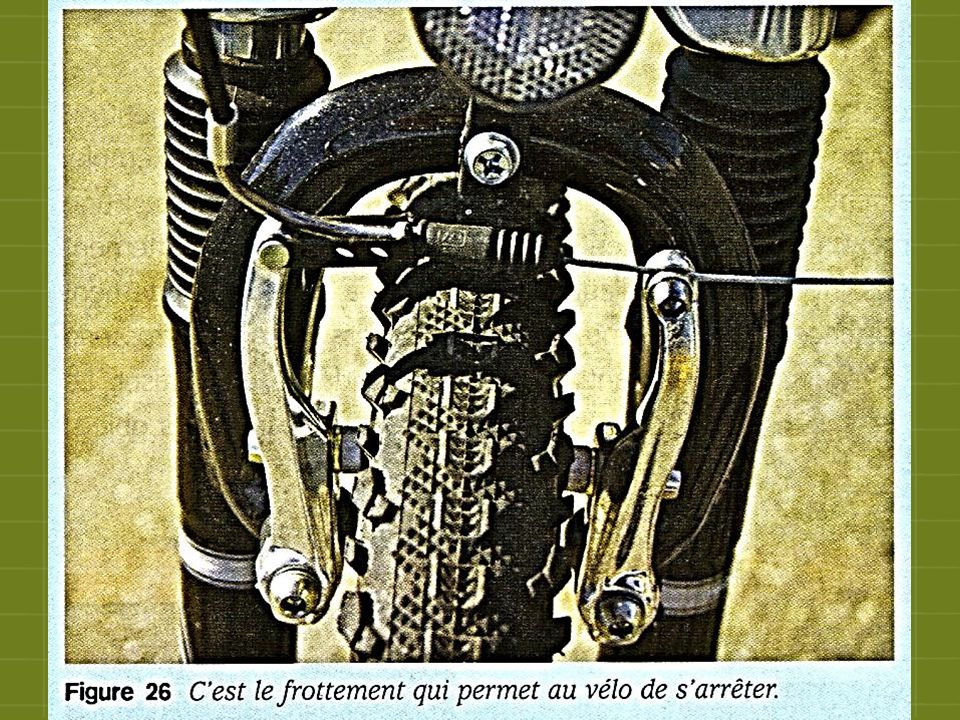
Un mouvement ne peut pas se déclencher de lui-même – Il faut qu’une force le provoque Ex. Il faut pédaler pour se déplacer sur son vélo Le frottement de l’air, des pièces en mouvement ou du sol peut ralentir un objet Ex. Quand on arrête de pédaler, le vélo continuera à avancer pendant un certain temps, mais finalement il s’arrêtera Ex. Le frottement nous aide aussi à freiner en vélo ou en auto

8
Le déclenchement et le ralentissement d’un mouvement
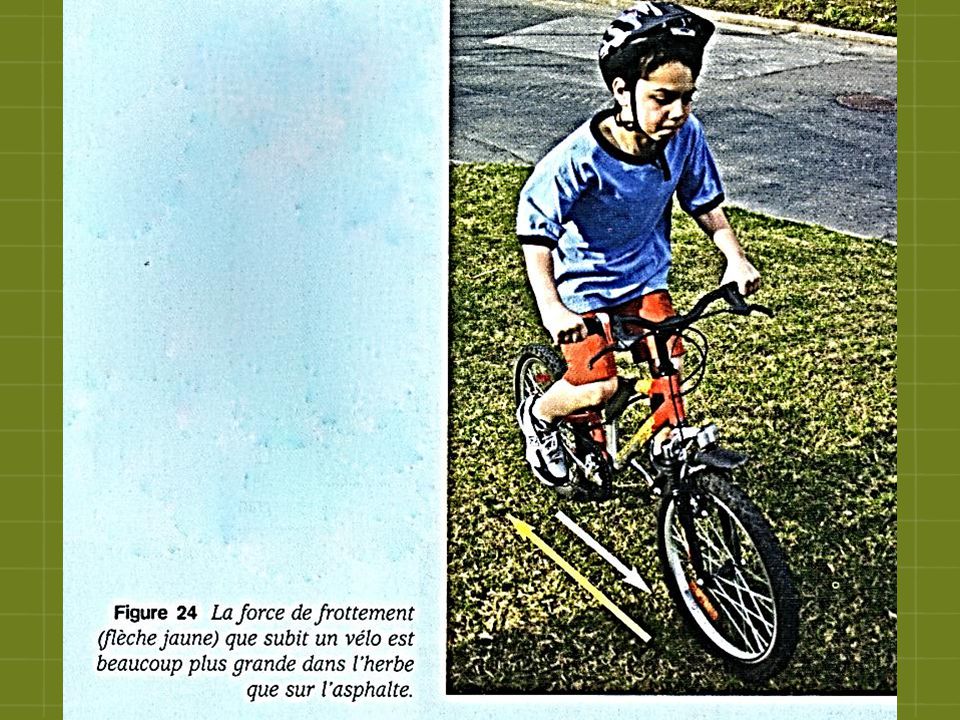
Le type de sol est un facteur important dans le mouvement d’un objet Ex. Il est beaucoup plus difficile de pédaler sur des surfaces comme l’herbe ou le sable que sur de l’asphalte La force de frottement est plus grande sur l’herbe et le sable, alors il faut appliquer une plus grande force pour combattre le frottement

11
Le déclenchement et le ralentissement d’un mouvement
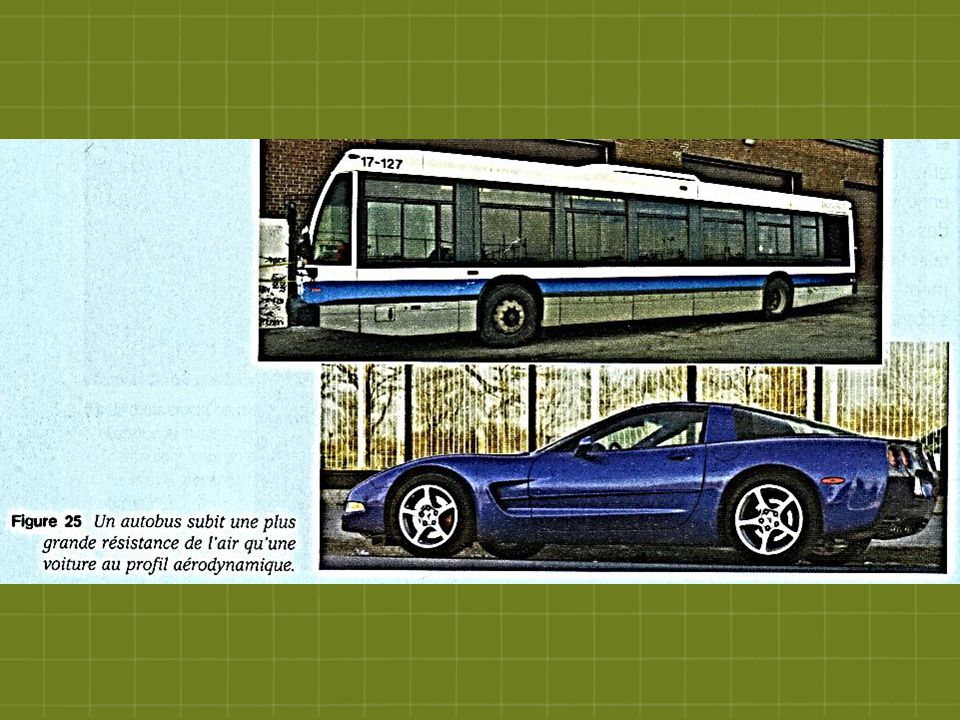
La forme d’un objet est aussi un facteur important dans le mouvement d’un objet Plus un objet a une forme carrée, plus la résistance de l’air cause du frottement Ex. La résistance de l’air est plus grande pour un autobus qu’une voiture avec un profile aérodynamique Profile aérodynamique: Une forme qui offre le moins de résistance possible à l’air

13
Les effets d’une force

14
Les types de forces Lorsq’on exerce une force sur un objet, on peut:
le mettre en mouvement ou modifier son mouvement le déformer ou le briser Les types de forces les plus courants sont: La force de flexion La force de tension La force de compression La force de torsion La force de cisaillement * Voir p. 410 à 411 du manuel pour des descriptions et des exemples des types de forces les plus courants

15
Les machines simples

16
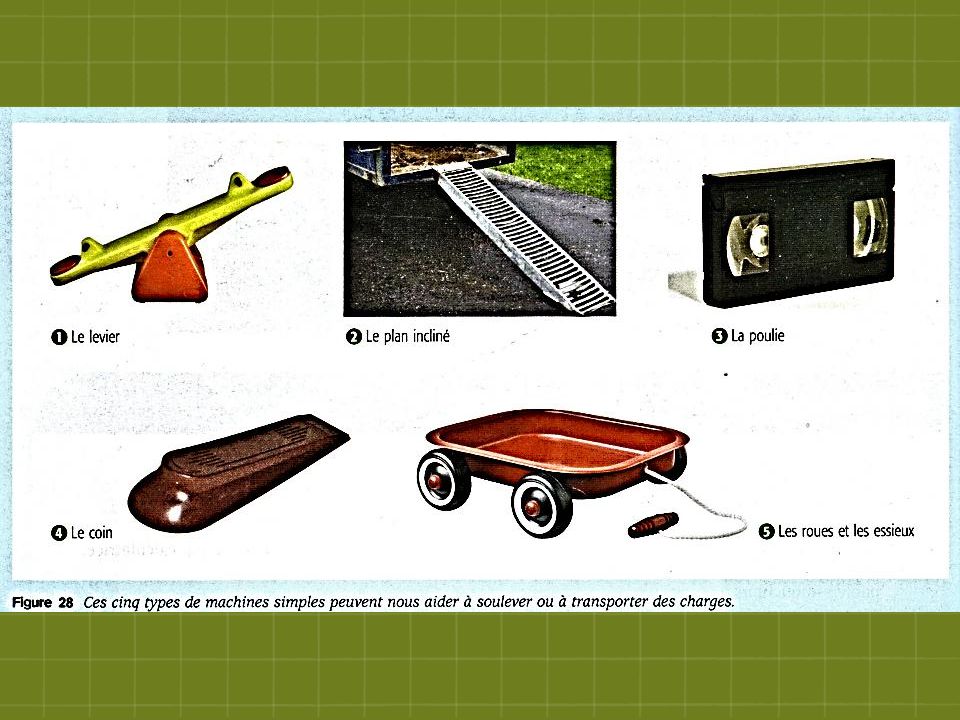
Les machines simples Les machines simples se retrouvent dans plusieurs objets qui font partie de ta vie quotidienne Elles permettent de soulever des objets ou de faciliter leur déplacement Les cinq types de machines simples: Le levier Le plan incliné La poulie Le coin Les roues et les essieux

18
Les machines simples Les machines simples exercent trois fonctions principales: Elles transmettent des forces Elles changent la direction des forces Elles modifient l’intensité (la grandeur) d’une force
 d’une force.")
19
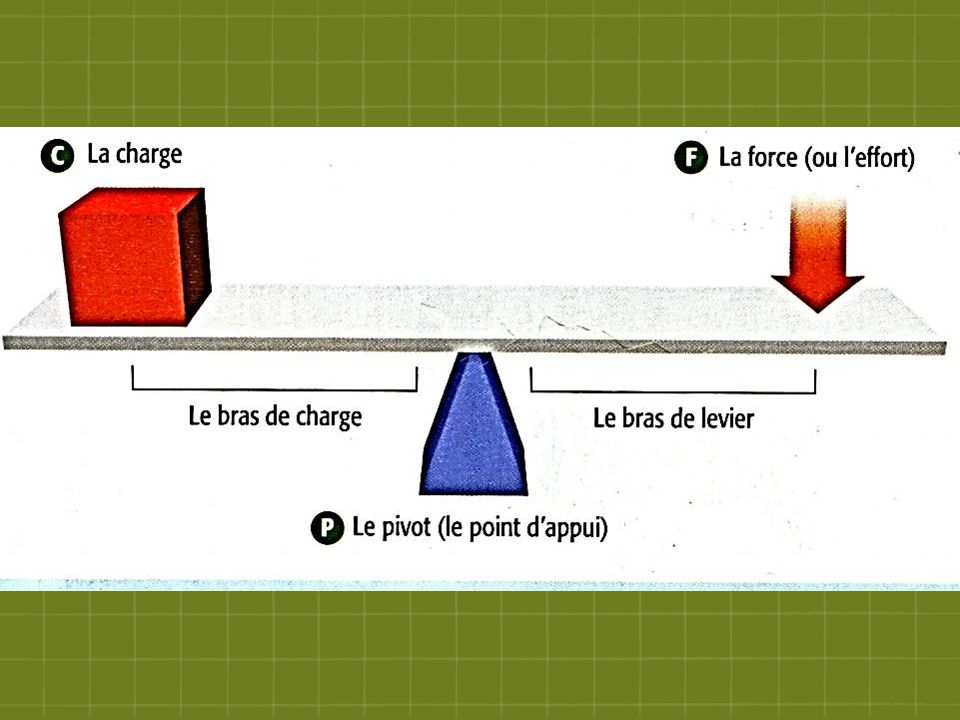
Le levier Un levier possède trois composantes: le pivot, la charge et la force Dans un levier, une pièce mobile repose sur un point d’appui, le pivot À une extrémité de la pièce mobile se trouve la charge (l’objet qu’il faut soulever ou déplacer) Une force est appliquée à l’autre extrémité de la pièce mobile
 Une force est appliquée à l’autre extrémité de la pièce mobile.")
21
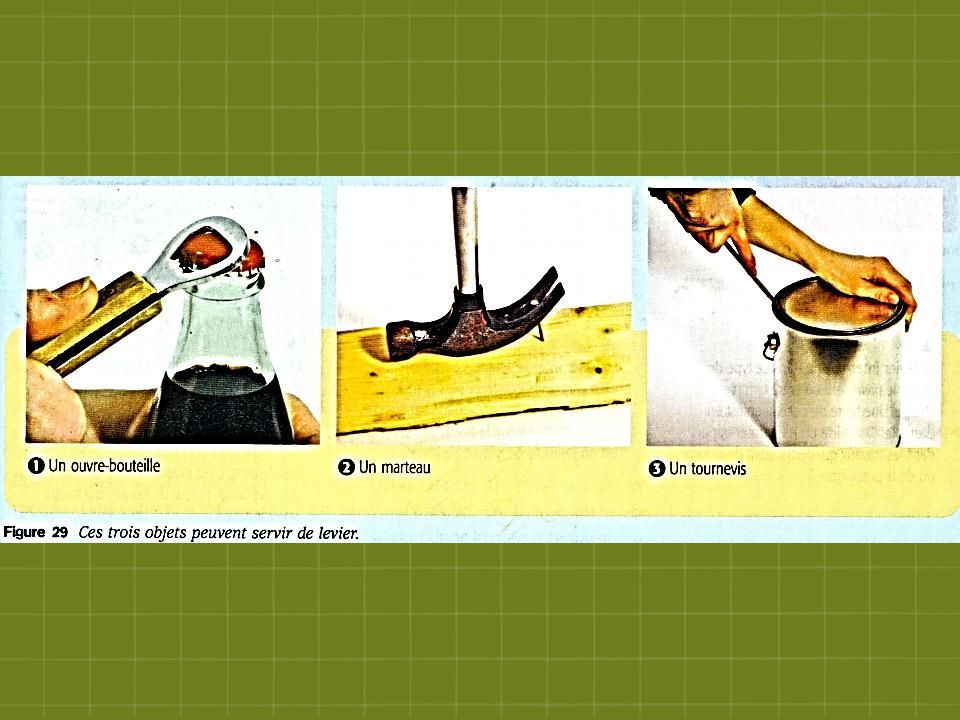
Le levier En déplaçant le pivot, la charge ou la force, on obtient trois types de leviers: Le levier inter-appui: Le pivot est situé entre la force et la charge (pour des travaux qui demandent de la force ou de la précision) Ex. Une paire de ciseaux
 Ex. Une paire de ciseaux.")
22
Le levier inter-appui (pivot au centre)
")
23
Le levier Le levier inter- résistant: La charge se situe entre la force et le pivot Il exerce toujours une plus grande force sur la charge que la force qu’on applique Ex. Une brouette

24
Le levier inter-résistant (charge au centre)
")
25
Le levier Le levier inter- moteur: La force s’exerce entre le pivot et la charge (pour multiplier la vitesse, la distance et la précision) Ex. Un bâton de hockey

26
Le levier inter-moteur (force au centre)
")
28
Le plan incliné Un plan incliné possède une pente
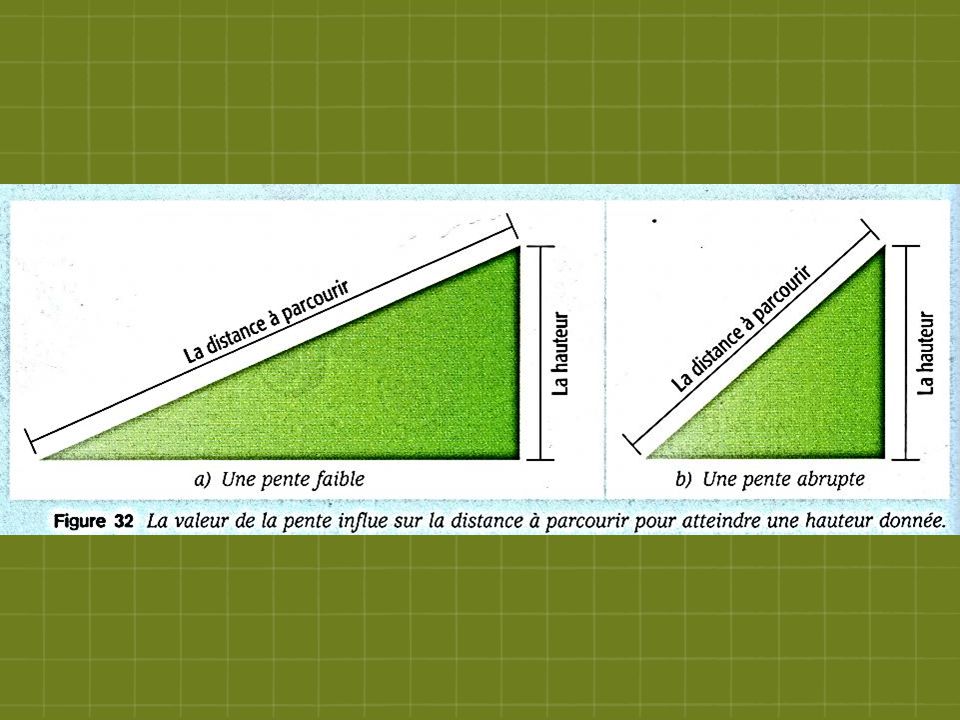
La pente réduit la force qu’il faut exercer pour soulever une charge ou un objet Au lieu de soulever un objet, on le pousse Quand la pente est faible, elle est plus facile à monter, mais la distance à parcourir est plus longue Quand la pente est abrupte, elle est plus difficile à monter, mais la distance à parcourir est plus courte

30
La poulie Il existe deux types de poulies:
Une poulie est composée d’une roue avec une corde ou une chaîne La corde ou la chaîne s’insère dans la gorge de la roue La poulie nous aide à soulever des charges Il existe deux types de poulies: La poulie fixe La poulie mobile

31
La poulie fixe La poulie fixe: Ne diminue pas la force nécessaire pour effectuer un travail Elle permet seulement de changer la direction de la force Ex. La corde d’un store vénitien

32
La poulie mobile La poulie fixe: Diminue la force nécessaire (1/2) pour effectuer un travail Une extrémité de la corde est fixée au plafond La charge et la poulie bougent dans la même direction

33
Les combinaisons de poulies
Nous pouvons combiner plusieurs poulies mobiles pour diminuer encore plus la force nécessaire Nous pouvons aussi combiner une poulie fixe et une poulie mobile (= un palan) pour changer la direction et diminuer la force nécessaire
 pour changer la direction et diminuer la force nécessaire.")
34
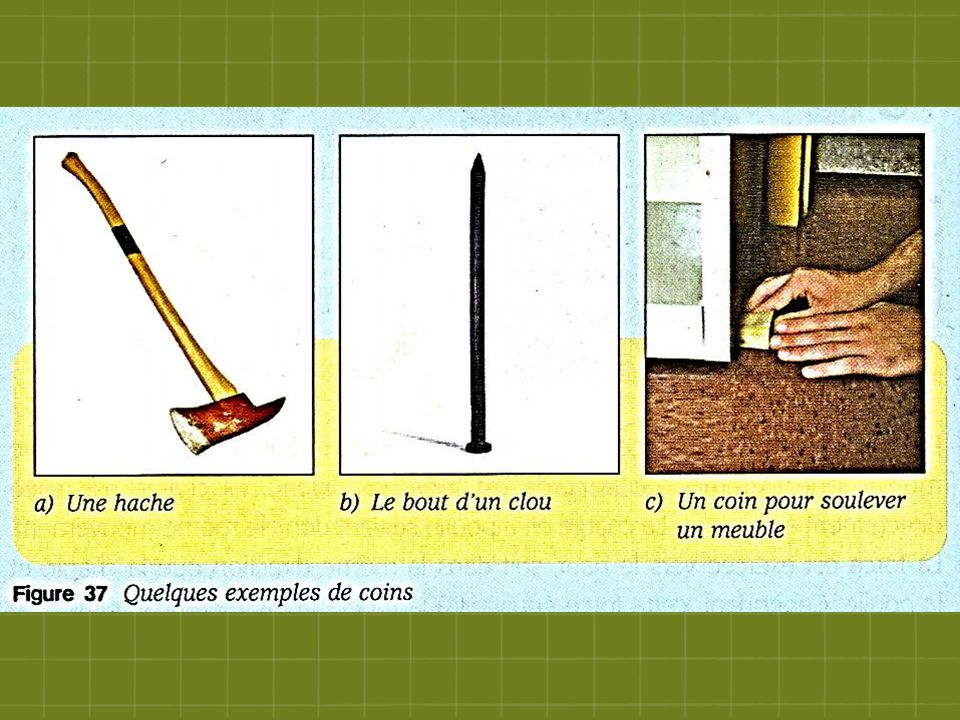
Le coin Le coin est un prisme triangulaire
On l’utilise pour exercer une force sur un objet Le coin nous aide à séparer les pièces Ex. Une hache, le bout d’un clou Le coin nous aide à soulever des objets Ex. Un coin pour soulever un meuble

36
Les roues et les essieux
Les roues et les essieux sont utilisés pour pousser des objets plus facilement Ex. Un chariot pour pousser une boîte plus facilement que sur le sol Ex. Les roues d’une bicyclette ou d’une automobile

37
La transmission du mouvement

38
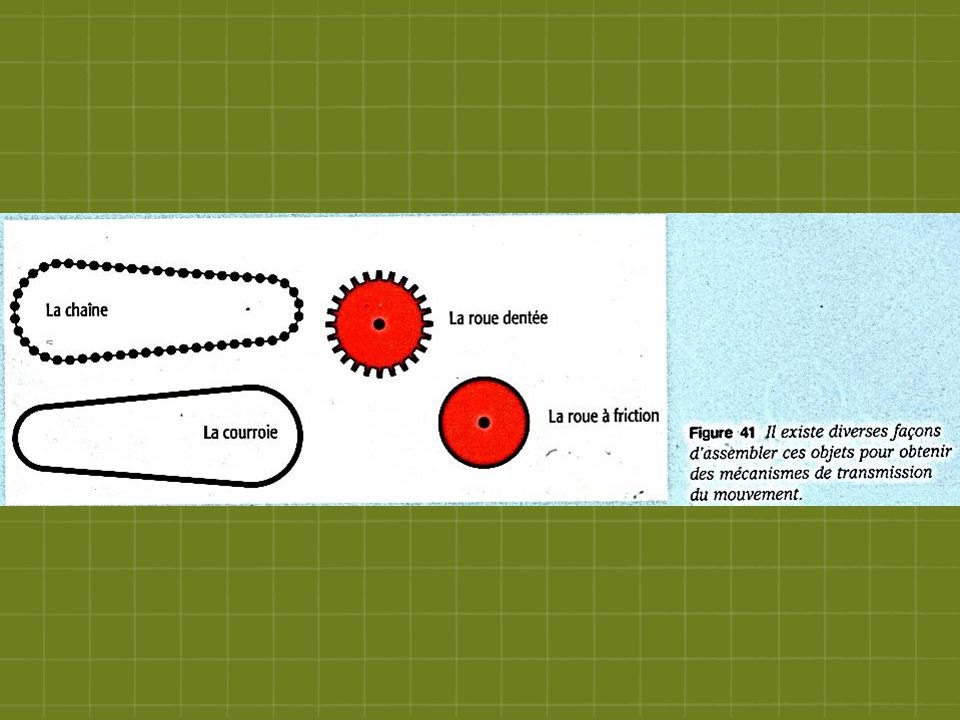
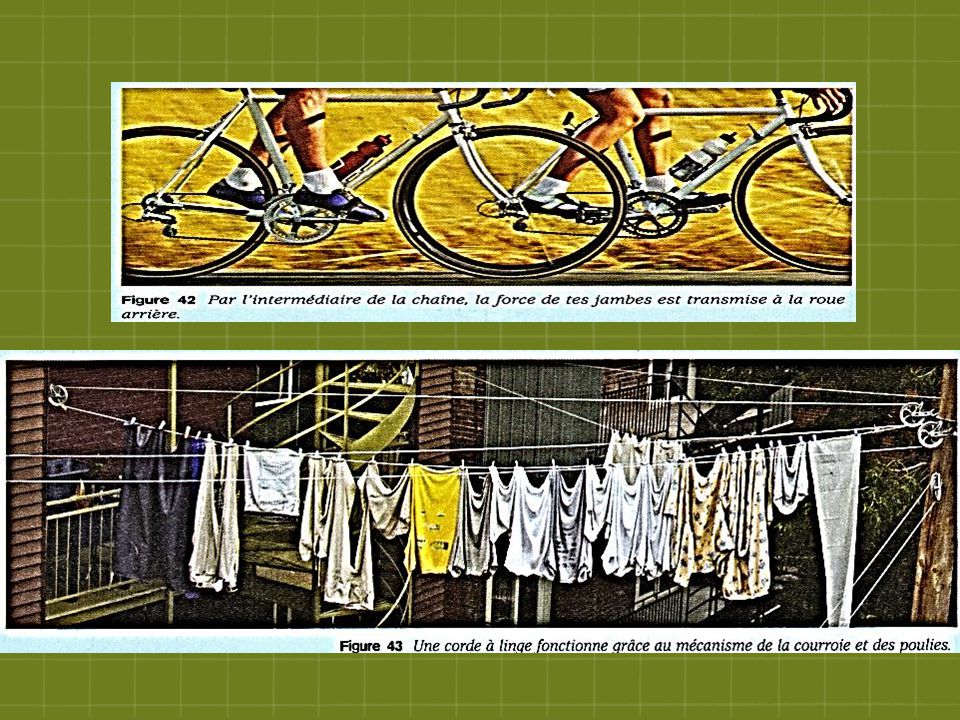
La transmission du mouvement
On peut combiner des machines simples pour former des systèmes mécaniques Ces systèmes servent à transmettre un mouvement d’un objet à un autre, grâce à différents mécanismes Les mécanismes transmettent les quatre types de mouvement: rectiligne, alternatif, circulaire et oscillatoire

44
La transformation du mouvement

45
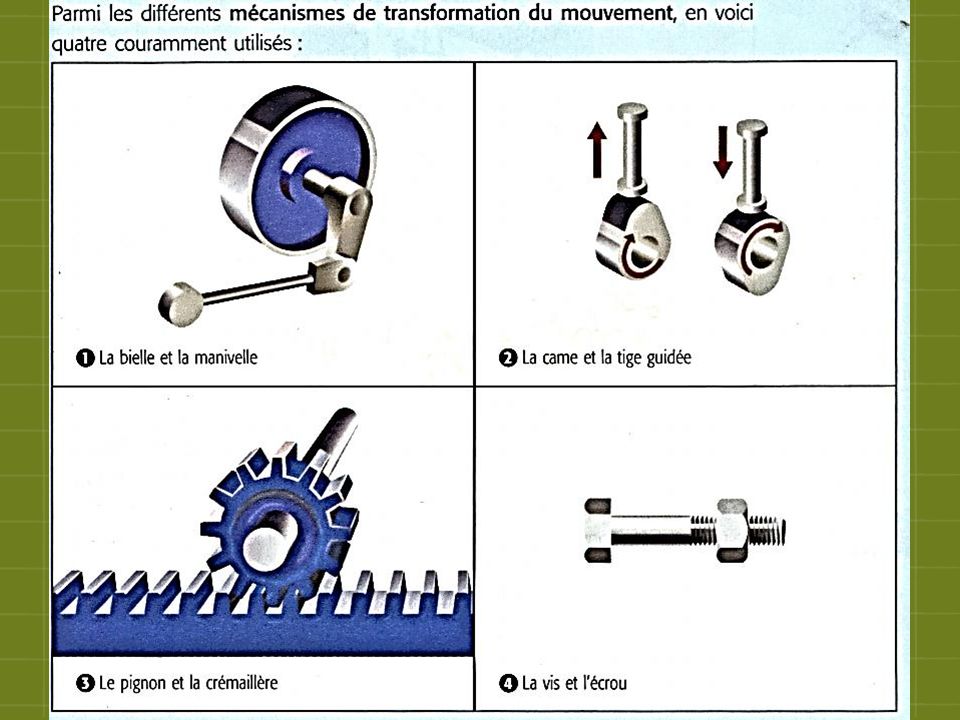
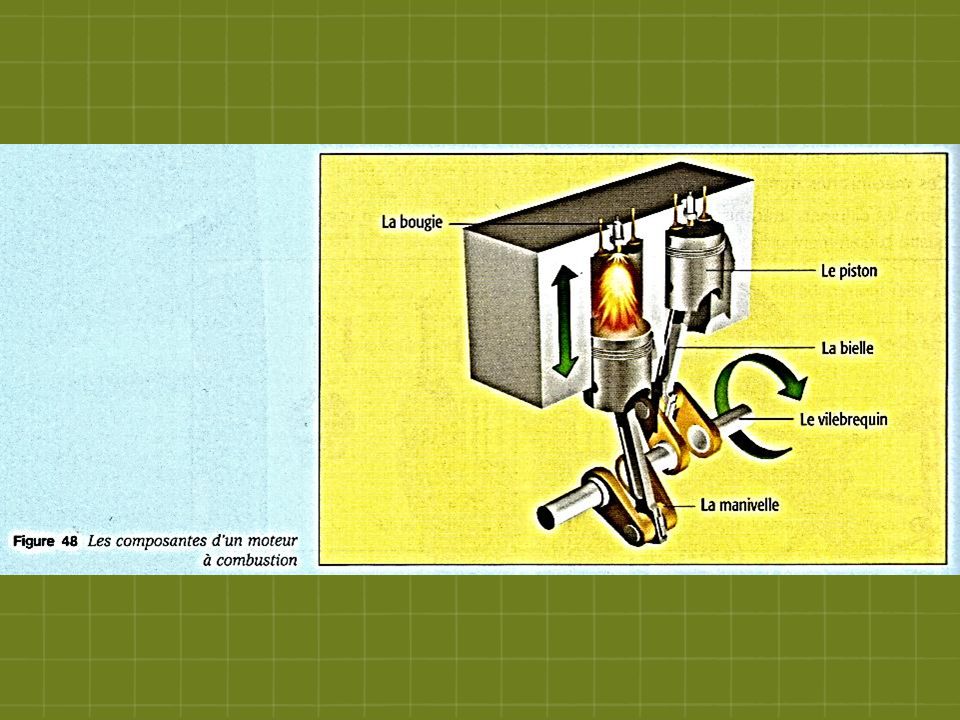
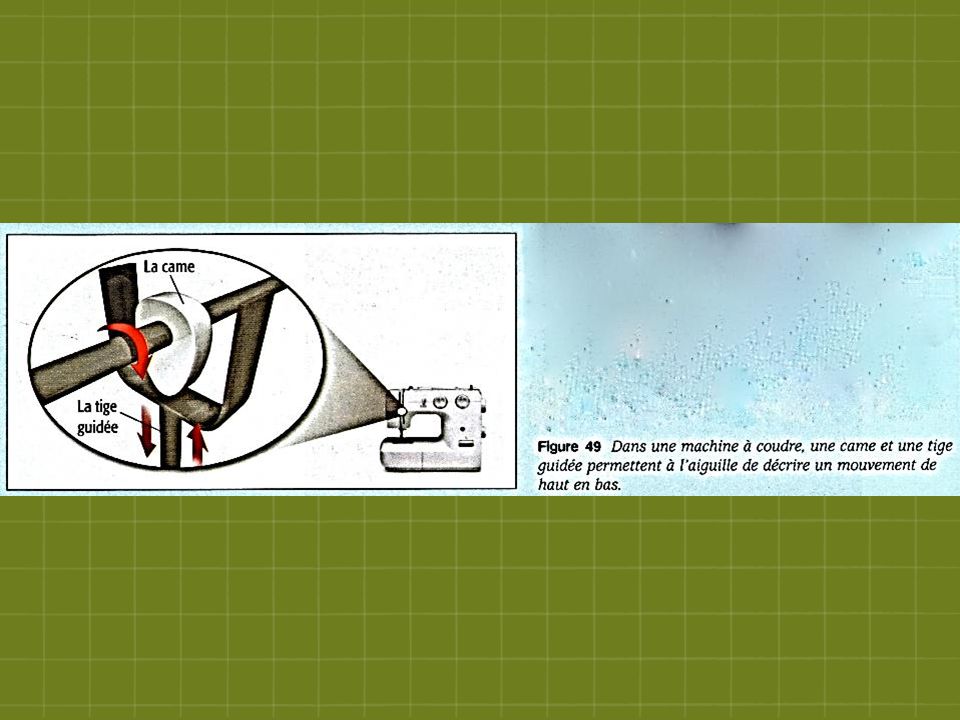
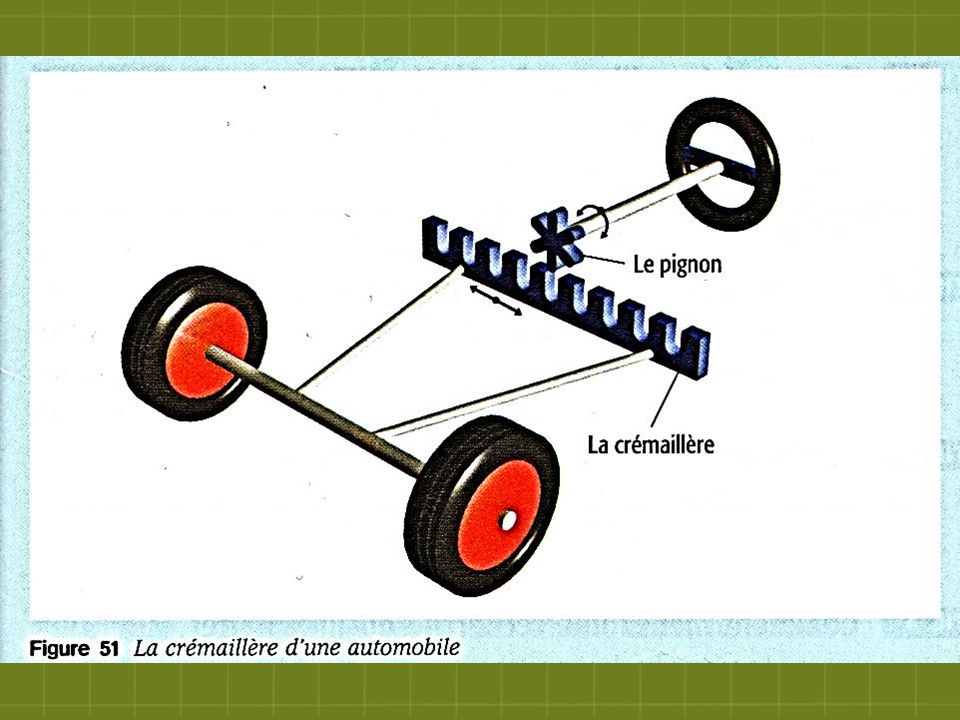
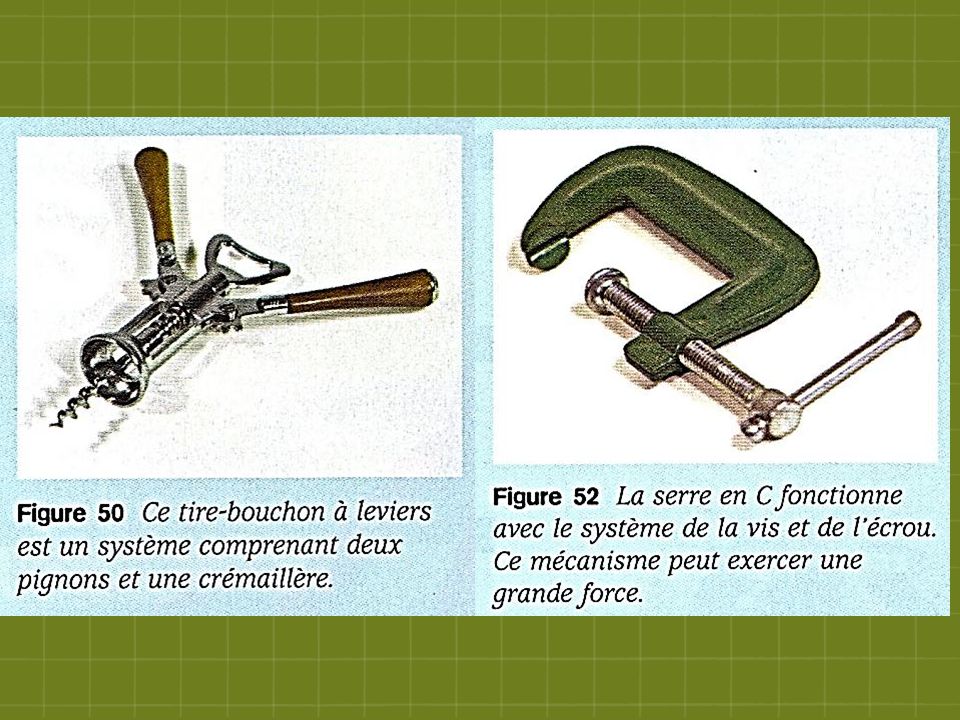
La transformation du mouvement
Certains mécanismes permettent de passer d’un type de mouvement à un autre (transformer un mouvement)
")