Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Equipe SIMM Signaux et Image Multisources Multicomposantes
Vision artificielle Laboratoire IRCOM-SIC, UMR 6615 CNRS Université de Poitiers, UFR Sciences Fondamentales et Appliquées Téléport 2 - Bat. SP2MI - Boulevard Marie et Pierre Curie - 86962 FUTUROSCOPE CHASSENEUIL CEDEX tel : (33) fax : (33) Christine FERNANDEZ-MALOIGNE, Professeur,
 fax : (33) Christine FERNANDEZ-MALOIGNE, Professeur,")
2
CH2) Quelques notions sur la perception
 Quelques notions sur la perception")
3
Du système visuel humain au système de vision numérique

4
Système visuel humain

5
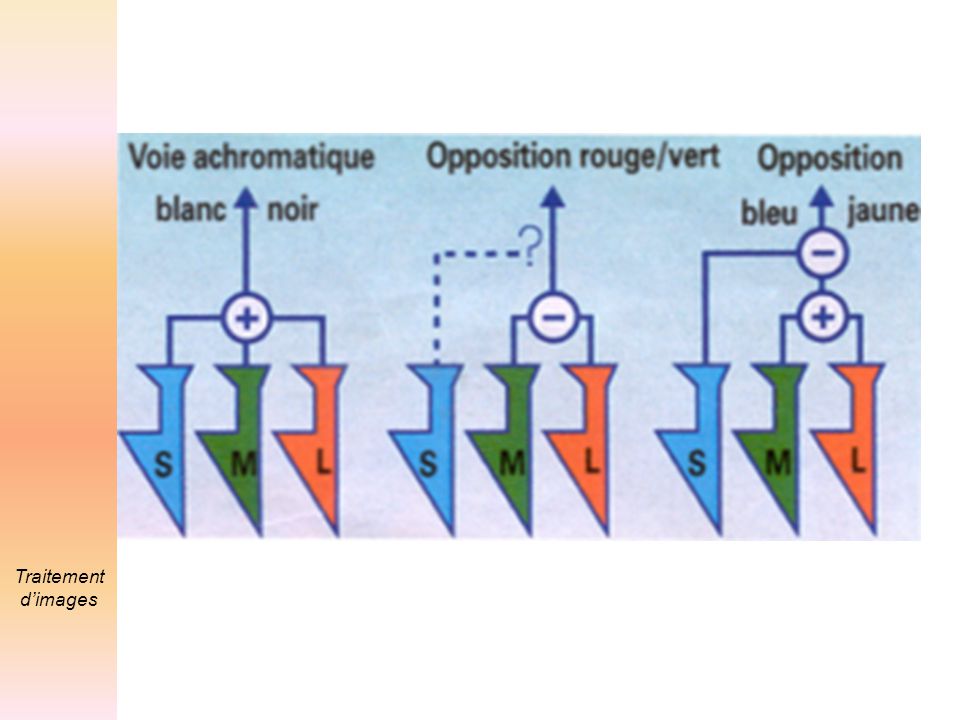
Système visuel humain (suite)
")
6
Système visuel humain (suite)
")
7
Système visuel humain (suite)
")
9
Chaîne d’acquisition et d’affichage d’images numériques
Traitements Stockage Stockage Visualisation Numérisation Echantillonnage Acquisition

10
Illusions d’optique : l’influence du recul

11
Interpolations symboliques

12
Effet de Bezold : Influence de l ’environnement

13
Effets de masquage et de facilitation
Cette image est constitué de trois couleurs; le blanc, le vert et un rose identique pour les deux lignes

14
Couleur et géométrie Voyez vous les cercles entre chaque ligne ? Ils n’existent pas !xistent pas !

15
Rémanence Si vous fixé le point du centre assez longtemps, il disparaîtra

16
Rémanence et couleurs antagonistes
Regardez cette image pendant 20 secondes puis regardez une surface blanche

18
Chaîne d’acquisition et d’affichage d’images numériques
Traitements Stockage Stockage Visualisation Numérisation Echantillonnage Acquisition

19
Introduction aux techniques d’imagerie
Un système de traitement d’images permet d’acquérir, de lire, de visualiser, de modifier et stocker les images. Il est composé d’une partie matérielle (hardware) et logicielle (software) Matérielle système d’acquisition (images multimodales 3D+t) ; système de traitement (ordinateur) ; système de stockage, archivage ; systèmes de visualisation et restitution. Logicielle acquisition ; traitement ; archivage.
 et logicielle (software) Matérielle. système d’acquisition (images multimodales 3D+t) ; système de traitement (ordinateur) ; système de stockage, archivage ; systèmes de visualisation et restitution. Logicielle. acquisition ; traitement ; archivage.")
20
Introduction aux techniques d’imagerie
Acquisition Numérisation Traitement Stockage Visualisation

21
CH3) Représentation des images numériques
Quelques éléments et définitions de base

22
Lumière, scène, image Optique Surface

23
Processus physiques dans la formation d’image
Radiométrie Principes physiques de la réflectance des objets Relation entre la lumière émise par une source et la quantité de lumière qui parvient au capteur Photométrie Mécanisme pour mesurer la quantité de lumière qui arrive au capteur Numérisation Échantillonnage dans l’espace et le temps pour produire une image numérique

24
Radiométrie Aspect de l ’image par rapport à l’aspect de la scène.
Étude de la relation entre la quantité de lumière incidente sur la scène et la fraction de cette lumière qui atteint le capteur. Cette fraction dépend de: Caractéristiques de la source lumineuse Caractéristiques de l’objet imagé Géométrie du système d’imagerie

25
Caractéristiques des objets Sources de l’image
Images en émission (cas des sources infra-rouges) ; Images en transmission = absorption (cas des rayons X) ; Images en réflexion : cas le plus courant i(x,y) : illumination r(x,y) : réflectance (0,1)
 ; Images en transmission = absorption (cas des rayons X) ; Images en réflexion : cas le plus courant. i(x,y) : illumination. r(x,y) : réflectance (0,1)")
26
Caractéristiques des objets en réflexion
Définitions Surface lambertienne Surface parfaitement diffusante qui émet ou réfléchit un flux lumineux f tel que: L = cte direction Ls Surface spéculaire (Speculus: miroir en latin) Surface de type miroir avec une seule direction pour laquelle L0
 Surface de type miroir avec une seule direction pour. laquelle L0.")
27
Modèle de caméra: aspects géométriques
projection d ’un point 3D sur le plan image

28
Modèle de caméra: aspects géométriques
Mécanismes de projection d ’un point 3D sur le plan image Projection perspective Objets déformés Projection orthographique Objets non déformés

29
Projection perspective
Objectif : obtenir la position p(x,y) sur le plan image d ’un point P(X,Y,Z) dans l’espace
 sur le plan image d ’un point P(X,Y,Z) dans l’espace.")
30
Soit un point P(X,Y,Z) dans l ’espace 3D
Soit un point P(X,Y,Z) dans l ’espace 3D . On veut P’(xi,yi,0), coordonnées du point projeté
 dans l ’espace 3D . On veut P’(xi,yi,0), coordonnées du point projeté.")
31
On retrouve les coordonnées par triangulation (triangles semblables)
")
32
Numérisation Théorie de l’échantillonnage de Shannon

33
Définition d’une image
Image physique : généralement analogique Image continue (ne pouvant être traitée par un ordinateur) Image informatique : numérique Image discrète (se prêtant à un traitement sur ordinateur)
 Image informatique : numérique. Image discrète (se prêtant à un traitement sur ordinateur)")
34
discrétisée (en espace et en amplitude).
Image numérique Pour pouvoir être traitée sur un calculateur (ordinateur), une image doit être: discrétisée (en espace et en amplitude). La discrétisation des coordonnées spatiales (x,y) est appelée échantillonnage spatial de l’image. La discrétisation de l’amplitude f est appelée la quantification en niveau de gris.
, une image doit être: discrétisée (en espace et en amplitude). La discrétisation des coordonnées spatiales (x,y) est appelée échantillonnage spatial de l’image. La discrétisation de l’amplitude f est appelée la. quantification en niveau de gris.")
35
Echantillonnage spatial (discrétisation de l’espace)
En mathématique, le terme d’image se réfère à une fonction bi-dimensionnelle d’intensité : f(x,y) où : f est l’amplitude de l’intensité de l’image (x, y) est un point dans un espace 2D (plan image). En 2D : f(x,y) est représenté par une matrice de MxN éléments, Chaque élément f(i,j) de cette matrice image est appelé un pixel (picture element). En pratique, M=N, et N est un multiple de 2 (N=2n). N est appelé la dimension de l’image. En 3D : f(i,j,k) = matrice de voxels.
 où : f est l’amplitude de l’intensité de l’image (x, y) est un point dans un espace 2D (plan image). En 2D : f(x,y) est représenté par une matrice de MxN éléments, Chaque élément f(i,j) de cette matrice image est appelé un pixel (picture element). En pratique, M=N, et N est un multiple de 2 (N=2n). N est appelé la dimension de l’image. En 3D : f(i,j,k) = matrice de voxels.")
36
Echantillonnage spatial (discrétisation de l’espace)
Théorie de l’échantillonnage : L’image est considérée comme un ensemble d’impulsions de Dirac où chaque impulsion est au centre du pixel et a pour amplitude l’intensité du pixel. L’échantillonnage est l’équivalent d’un bloqueur d’ordre zéro pour les signaux temporel f(x,y)=I(x,y)SmSn d(x-mDx) d(y-nDy) Echantillonnage carré le plus fréquent
=I(x,y)SmSn d(x-mDx) d(y-nDy) Echantillonnage carré le plus fréquent.")
37
Echantillonnage spatial (discrétisation de l’espace)
")
38
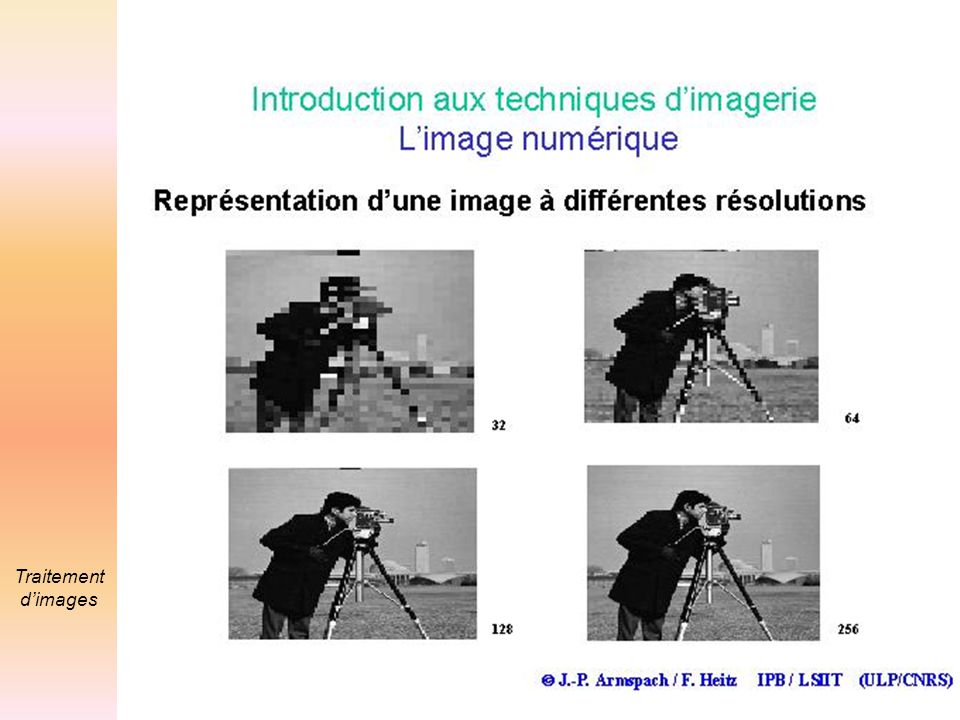
Echantillonnage et résolution

39
Discrétisation de l’amplitude (quantification des niveaux de gris)
La valeur de f(i,j) est quantifiée sur m bits (éléments binaires) et peut ainsi prendre 2m valeurs entières
 est quantifiée sur m bits (éléments binaires) et peut ainsi prendre 2m valeurs entières.")
40
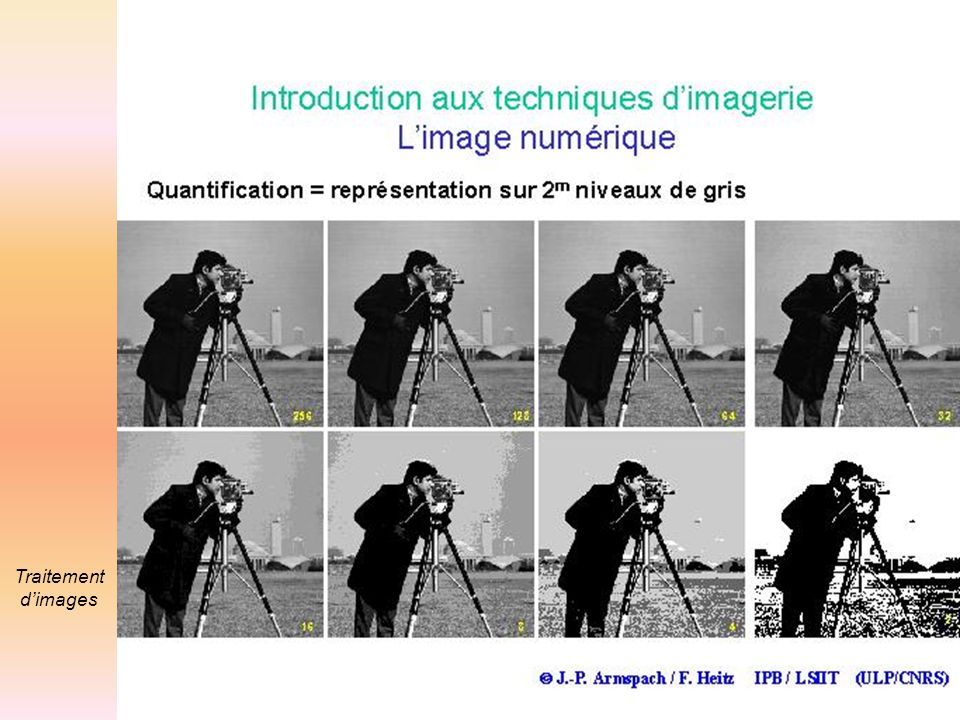
Discrétisation de l’amplitude (quantification des niveaux de gris)
1 bits (2 niveaux) 8 bits (256 niveaux) 6 bits (64 niveaux)
 8 bits (256 niveaux) 6 bits (64 niveaux)")
41
Quantification

42
Image numérique (suite)
")
46
Image numérique (suite)
Grille discrète 2D Pixel 2 3 4 5 6 7 1

47
Image numérique (suite)
Distance Voisinage Vk(P) = { Q : 0 <d(P,Q) <= k } distance de Manathan : d1(P,Q)=|xp- xq| + |yp- yq| distance euclidienne : d2(P,Q)=[(xp- xq)2+ (yp- yq)2]1/2 distance de l'échiquier : dinf(P,Q)=Max(|xp- xq| , |yp- yq|) dinf(P,Q) <= d2(P,Q) <= d1(P,Q) 2 3 4 5 6 7 1
 = { Q : 0 <d(P,Q) <= k } distance de Manathan : d1(P,Q)=|xp- xq| + |yp- yq| distance euclidienne : d2(P,Q)=[(xp- xq)2+ (yp- yq)2]1/2. distance de l échiquier : dinf(P,Q)=Max(|xp- xq| , |yp- yq|) dinf(P,Q) <= d2(P,Q) <= d1(P,Q)")
48
Traitement d’images Acquisition, numérisation Bas Niveau
Transmission, compression Rehaussement, restauration,amélioration, filtrage (prétraitements) Segmentation (contours, régions, texture) Reconnaissance des formes Compréhension de l’image aide au diagnostic, commande d’automatismes Haut niveau indexation, fouille d’images interprétation d'images utilisant des connaissances de haut niveau (connaissances expertes) …
 Segmentation (contours, régions, texture) Reconnaissance des formes. Compréhension de l’image. aide au diagnostic, commande d’automatismes. Haut niveau. indexation, fouille d’images. interprétation d images utilisant des connaissances de haut niveau (connaissances expertes) …")
49
Exemples de traitement d’images
Filtrage Compression Segmentation Reconnaissance et suivi de forme

50
Rehaussement de contraste

51
Reconnaissance de formes

52
Codage couleur

Présentations similaires