Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
3. Variantes de l’algorithme
du simplexe

2
Les deux phases du simplexe
Pour initialiser l’algorithme du simplexe, il faut déterminer une solution de base initiale. Or une telle solution de base initiale n’est pas nécessairement disponible. De plus, en général, nous ne savons même pas si le domaine réalisable n’est pas vide. La phase I du simplexe: → indique si le problème est réalisable (i.e., son domaine réalisable n’est pas vide) → si oui, fournit l’information pour générer une solution de base initiale.
 → si oui, fournit l’information pour générer une solution de base. initiale.")
3
Cas simple Soit le problème de programmation linéaire suivant:
En utilisant les variables d’écart xn+1 xn+2 . xn+m

4
Cas simple Le problème devient Les variables de base de la solution
initiale sont xn+1, xn+2,…, xn+m

5
Cas plus compliqué Considérons plutôt le problème suivant:
En utilisant les variables d’écart xn+1 xn+2 . xn+m

6
Cas plus compliqué La solution de base où xn+1, xn+2,…, xn+m sont les
variables de base n’est pas réalisable car les valeurs des variables xn+i = –bi ≤ i = 1,2,…,m lorsque les variables hors base sont égales à 0 Alors le problème devient

7
Construisons un problème artificiel
Cas général Nous utilisons une phase préliminaire (Phase I) Dans le cas général où le problème est de la forme Construisons un problème artificiel Introduisons les variables artificielles t1 t2 . tm
 Dans le cas général où le problème est de la forme. Construisons un problème artificiel. Introduisons les variables. artificielles. t1. t2. . tm.")
8
Solution de base réalisable initiale
Les contraintes deviennent donc Les variables t1, t2,…, tm sont les variables de base d’une solution de base réalisable de ce système

9
Construisons un problème artificiel
Probème artificiel Nous utilisons une phase préliminaire (Phase I) Dans le cas général où le problème est de la forme Construisons un problème artificiel Introduisons les variables artificielles t1 t2 . tm Remplaçons la fonction économique par une nouvelle: minimiser la somme des variables artificielles
 Dans le cas général où le problème est de la forme. Construisons un problème artificiel. Introduisons les variables. artificielles. t1. t2. . tm. Remplaçons la fonction économique. par une nouvelle: minimiser la. somme des variables artificielles.")
10
Problème artificiel Le problème artificielle de la phase I est donc de la forme Résolvons ce problème avec l’algorithme du simplexe

11
Problème artificiel Générons un problème équivalent en soustrayant
chacune des m premières contraintes de celle associée à la fonction économique Définissons

12
Problème artificiel équivalent
Le problème équivalent est donc de la forme

13
Résolution du problème de la phase I
Ce problème est résolu avec l’algorithme du simplexe. Les variables artificielles t1, t2 ,…, tm sont les variables de base de la solution initiale puisque leur valeur est non négative lorsque les variables xj du problème original sont fixées à 0.

14
Résultat de la phase I Proposition À la fin de la phase I
(i) si la valeur optimale min w de la fonction économique est positive (i.e., min w > 0), alors le domaine réalisable du problème original est vide (i.e., le problème original n’est pas réalisable) (ii) si la valeur optimale min w de la fonction économique est nulle (i.e., min w = 0), alors le domaine réalisable du problème original n’est pas vide (i.e., le problème original est réalisable).
 si la valeur optimale min w de la fonction économique est. positive (i.e., min w > 0), alors le domaine réalisable du. problème original est vide (i.e., le problème original n’est. pas réalisable) (ii) si la valeur optimale min w de la fonction économique est. nulle (i.e., min w = 0), alors le domaine réalisable du. problème original n’est pas vide (i.e., le problème original. est réalisable).")
15
Résultat de la phase I Preuve (i) (Preuve par contraposée)
Si le domaine réalisable du problème original n’est pas vide,

16
Résultat de la phase I Preuve (i) (Preuve par contraposée)
Si le domaine réalisable du problème original n’est pas vide, substituons ces valeurs des variables xj dans le problème de la phase I

17
Résultat de la phase I Preuve (i) (Preuve par contraposée)
Si le domaine réalisable du problème original n’est pas vide, substituons ces valeurs des variables xj dans le problème de la phase I

18
Résultat de la phase I Preuve (i) (Preuve par contraposée)
Si le domaine réalisable du problème original n’est pas vide, substituons ces valeurs des variables xj dans le problème de la phase I pour obtenir une solution réalisable où toutes les variables ti sont égales à 0 et où la valeur de la fonction économique w = 0.

19
Résultat de la phase I Preuve (i) (Preuve par contraposée)
Si le domaine réalisable du problème original n’est pas vide, substituons ces valeurs des variables xj dans le problème de la phase I pour obtenir une solution réalisable où toutes les variables ti sont égales à 0 et ainsi ayant une valeur de la fonction économique w = 0. Donc si min w > 0, alors le problème original n’a pas de solution.

20
Résultat de la phase I (ii)
Si à la fin de la phase I, la valeur de min w = 0,

21
Résultat de la phase I (ii)
Si à la fin de la phase I, la valeur de min w = 0, alors il existe une solution réalisable du problème de la phase I où toutes les variables artificielles ti sont égales à 0. Dans ce cas, les valeurs que prennent les variables xj constituent une solution pour le problème original.

22
Résultat de la phase I (ii)
Si à la fin de la phase I, la valeur de min w = 0, alors il existe une solution réalisable du problème de la phase I où toutes les variables artificielles ti sont égales à 0. Dans ce cas, les valeurs que prennent les variables xj constituent une solution pour le problème original.

23
Solution initiale pour poursuivre
Dans le cas où min w est égale à 0, nous poursuivons la résolution du problème original avec l’algorithme du simplexe en utilisant l’information du tableau de la dernière itération de la phase I pour construire une solution de base initiale pour le problème original. Considérons le tableau du simplexe de la dernière itération de la phase I

24
Tableau phase I m des colonnes du tableau sont les m
vecteurs unitaires où le 1 est la iième composante Solution optimale de la phase I ↓

25
Tableau phase I m des colonnes du tableau sont les m
vecteurs unitaires où le 1 est la iième composante La variable sous laquelle nous retrouvons le iième vecteur unitaire est la variable de base dans la iième ligne du tableau

26
Solution initiale pour poursuivre
Deux cas différents doivent être considérés. Cas 1: Aucune variable artificielle n’est variable de base. Donc toutes les variables de base sont des variables originales xj. Considérons le tableau du simplexe de la dernière itération de la phase I

27
Solution initiale pour poursuivre
Éliminons les colonnes des variables artificielles Remplaçons la dernière ligne du tableau par la fonction économique du problème original

28
Solution initiale pour poursuivre
Dénotant les variables de base par ,le tableau devient Pour retrouver le tableau du simplexe associé à cette base, il faut ramener à 0 les coûts relatifs des variables de base

29
Solution initiale pour poursuivre
Modifions la dernière ligne de ce tableau en soustrayant chacune des autres lignes i multipliée par De sorte que

30
Solution initiale pour poursuivre
Le tableau devient donc Nous avons donc un tableau du simplexe associé à une solution initiale de base pour le problème originale où les variables de base sont

31
Cas 2: Certaines variables de base sont des variables artificielles
Cas 2: Certaines variables de base sont des variables artificielles. Supposons que la variable artificielle tk est variable de base dans la ligne i

32
Solution initiale pour poursuivre
Cas 2: Certaines variables de base sont des variables artificielles. Supposons que la variable artificielle tk est variable de base dans la ligne i. Cette ligne du tableau à la dernière itération de la phase I est de la forme Mais min w = 0 => tk = 0 . Ainsi Essayons de remplacer tk par une des variables originales xj à titre de variable de base dans la ligne i. Analysons les coefficients des variables xj dans cette ligne.

33
Solution initiale pour poursuivre
Supposons qu’il existe un indice s, 1≤ s ≤ n, tel que Transformons le dernier tableau de la phase I en exécutant un pivot sur l’élément pour que xs devienne la variable de base dans la ligne i. Ceci ne modifie en rien la valeur de l’objectif w puisque Ainsi nous obtenons une nouvelle solution de base optimale pour la phase I où la variable xs remplace la variable tk comme variable de base dans le ligne i

34
Solution initiale pour poursuivre
ii) Supposons que On peut alors démontrer que la contrainte i du problème est redondante car elle peut s’exprimer comme une combinaison linéaire des autres contraintes. Dans ce cas, la contrainte i peut être éliminée sans modifier le domaine réalisable. Nous éliminons donc la ligne i du tableau. Après avoir traité chaque ligne où la variable de base est une variable artificielle selon i) ou ii), alors nous obtenons une autre solution optimale de la phase I où aucune variable artificielle n’est de base. Nous retombons alors sur le Cas 1
 Supposons que . On peut alors démontrer. que la contrainte i du problème est redondante car elle peut. s’exprimer comme une combinaison linéaire des autres contraintes. Dans ce cas, la contrainte i peut être éliminée sans modifier le. domaine réalisable. Nous éliminons donc la ligne i du tableau. Après avoir traité chaque ligne où la variable de base est une. variable artificielle selon i) ou ii), alors nous obtenons une autre. solution optimale de la phase I où aucune variable artificielle n’est. de base. Nous retombons alors sur le Cas 1.")
35
Notion de multiplicateurs du simplexe
Considérons la dernière ligne du tableau du simplexe associé à la base B qui correspond aux vecteurs des coûts relatifs des variables:

36
Notion de multiplicateurs du simplexe
Dénotons le vecteur défini par Alors ou où dénote la jième colonne de la matrice de contrainte A π est le vecteur des multiplicateurs du simplexe associé à la base B.

37
Notion de multiplicateurs du simplexe
Le vecteur des multiplicateurs du simplexe π permet de calculer les coûts relatifs directement à partir des données originales du problème. Les composantes πi (i=1,2,…,m) du vecteur des multiplicateurs peuvent être considérés comme des poids associés aux lignes i du tableau (ou aux contraintes i du problème) tel que la soustraction d’une combinaison linéaire des lignes avec ces poids de la dernière ligne du tableau permet d’annuler les coûts relatifs des variables de base.
 du vecteur des multiplicateurs peuvent être considérés comme des poids associés aux lignes i du tableau (ou aux contraintes i du problème) tel que la soustraction d’une combinaison linéaire des lignes avec ces poids de la dernière ligne du tableau permet d’annuler les coûts relatifs des variables de base.")
38
Sensitivité de la valeur optimale aux modifications des termes de droite
Les multiplicateurs du simplexe associés à une base optimale permettent de mesurer l’effet de modifier les termes de droite sur la valeur optimale d’un problème. Considérons le problème original et un autre où les termes de droite sont modifiés

39
Sensitivité de la valeur optimale aux modifications des termes de droite
Dénotons par B* une base optimale du problème original, et la solution de base optimale correspondante dont la valeur (optimale pour le problème) est donnée par
 est donnée par.")
40
Sensitivité de la valeur optimale aux modifications des termes de droite
Choisissons la valeur de de telle sorte que Donc B* demeure une base réalisable pour le nouveau problème modifié puisque la solution de base associée est

41
Sensitivité de la valeur optimale aux modifications des termes de droite
Donc B* demeure une base réalisable pour le nouveau problème modifié puisque la solution de base associée est De plus, puisque ni les coûts cj ni la matrice A n’ont pas été modifiés, alors le vecteur des multiplicateur π* reste inchangé. Par conséquent les coûts relatifs demeurent inchangés et donc non négatifs pour le nouveau problème. La solution précédente est donc optimale pour le nouveau problème.

42
Sensitivité de la valeur optimale aux modifications des termes de droite
Cette solution est optimale pour le nouveau problème. Évaluons la valeur optimale du nouveau problème:.

43
Sensitivité de la valeur optimale aux modifications des termes de droite
Évaluons la valeur optimale du nouveau problème:. Ainsi, indique la taux de variation unitaire de la fonction économique lorsque le terme de droite bi de la contrainte i est modifié d’une quantité choisie de telle sorte que la base demeure réalisable pour le nouveau problème.

44
Domaine réalisable L’ensemble des points réalisables pour le système
5x + 3y ≤ 30 2x + 3y ≤ 24 1x + 3y ≤ 18 x,y≥0

45
Domaine réalisable L’ensemble des points réalisables pour le système
5x + 3y ≤ 30 2x + 3y ≤ 24 1x + 3y ≤ 18 x,y≥0

46
Forme révisée du simplexe
Dans cette variante de l’algorithme du simplexe, nous exploitons les multiplicateurs du simplexe pour permettre de faire le pivot sur un tableau de dimension réduite. Nous considérons le problème de programmation linéaire sous sa forme standard

47
Forme révisée du simplexe
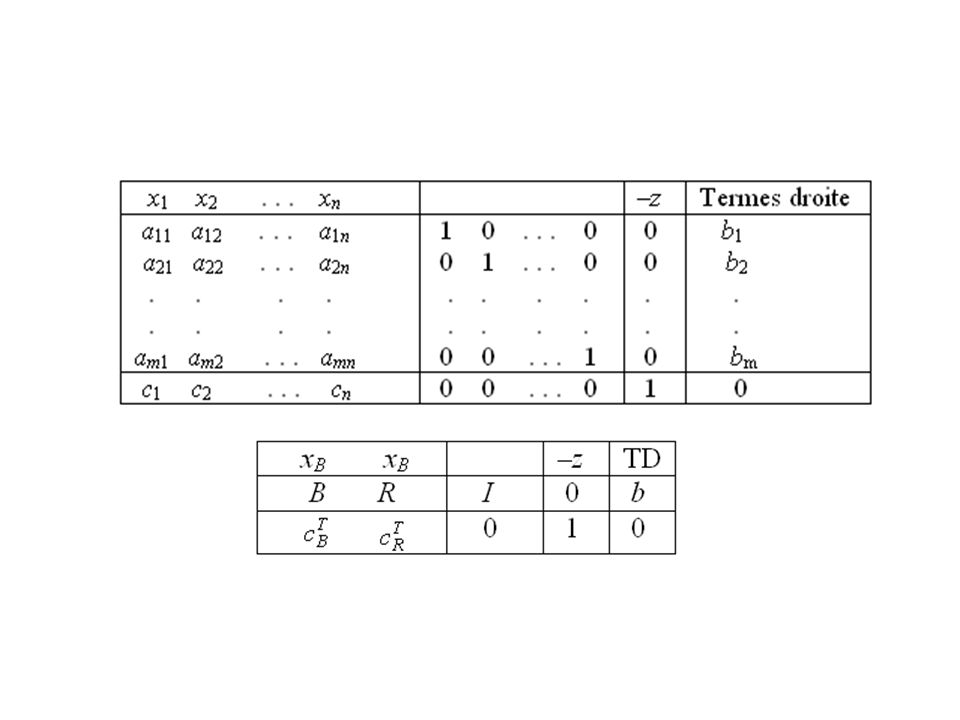
Les données du problème peuvent être résumées dans le tableau suivant

48
Construisons un nouveau tableau à partir de ce dernier en ajoutant une matrice identité mxm à côté de la matrice A des contraintes et en lui associant un vecteur de m composantes égales à 0 dans la dernière ligne du tableau

49
Supposons que nous résolvions le problème avec l’algorithme du simplexe et que nous fassions également les pivots sur la partie additionnelle du tableau à chaque itération. Considérons une solution de base réalisable dont la base B est constituée des m premières colonnes de A. Pour faciliter la présentation représentons le tableau augmenté sous une forme matricielle équivalente:

51
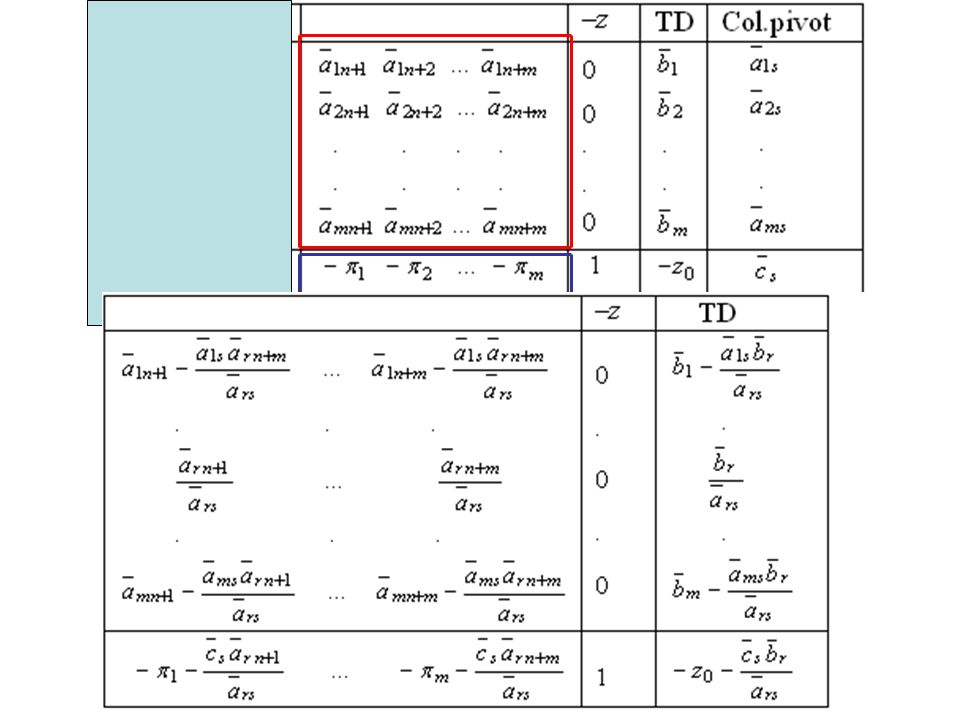
Le tableau du simplexe associé à la base B peut être retrouvé
en multipliant les m premières lignes du tableau par B-1 et en ramenant les coûts relatifs des variables de base à 0 B-1

52
Considérant maintenant la représentation explicite du tableau augmenté à cette itération
La matrice B-1 se retrouve à l’endroit où était la matrice identité dans le tableau des données originales

53
Dénotons par π = [π1, π2,…, πm]T le vecteur des multiplicateurs
associés à la base B. Alors En particulier, pour i = 1,2,…,m, puisque cn+i = 0 et
![Dénotons par π = [π1, π2,…, πm]T le vecteur des multiplicateurs](http://slideplayer.fr/slide/450226/1/images/53/D%C3%A9notons+par+%CF%80+%3D+%5B%CF%801%2C+%CF%802%2C%E2%80%A6%2C+%CF%80m%5DT+le+vecteur+des+multiplicateurs.jpg "associés à la base B. Alors. En particulier, pour i = 1,2,…,m, puisque cn+i = 0 et.")
54
Ce tableau s’écrit donc sous la forme
B-1 inverse de la base Multiplicateurs changés de signe

55
La partie suivante de ce tableau
Comporte toute l’information nécessaire pour compléter une itération du simplexe.

56
Critère d’entrée: Pour déterminer la variable d’entrée ou vérifier si
la solution actuelle est optimale, il faut déterminer les coûts relatifs

57
Critère de sortie: Pour compléter cette étape, il faut connaître

58
Pivot: Il suffit de compléter le pivot uniquement sur les colonnes du
tableau précédent. En effet nous aurons alors toute l’information nécessaire pour compléter la prochaine itération. En pivotant sur l’élément

60
Variante du simplexe pour problème avec variables bornées
Considérons le problème de programmation linéaire avec variables bornées suivant Ramenons à 0 les bornes inférieures en faisant le changement de variables suivant xj = gj – lj (i.e., gj = xj + lj )
")
61
Variante du simplexe pour problème avec variables bornées
le problème devient et en remplaçant: uj = qj – lj et b = h – Al

62
Variante du simplexe pour problème avec variables bornées
Dans ce problème puisque cTl représente une constante, nous pouvons éliminer ce terme de la fonction économique sans changer la solution optimale et dans la suite de la présentation considérer ce problème sans perte de généralité.

63
Variante du simplexe pour problème avec variables bornées
Considérons la formulation explicite du problème Une façon de le résoudre est de le ramener sous une forme standard en introduisant des variables d’écart yj, et d’ensuite utiliser l’algorithme du simplexe

64
Considérons une solution de base réalisable de ce problème.
La présence des contraintes xj + yj = uj implique qu’au moins une des deux variables xj ou yj est variable de base, j = 1,2,…,n. Donc une des trois situations suivantes prévaut pour chaque j = 1,2,…,n: a) xj = uj est variable de base et yj = 0 est variable hors base b) xj = 0 est variable hors base et yj = uj est variable de base c) 0 < xj < uj est variable de base et 0 < yj < uj est variable de base Non dégénérescence: toutes les variables de base sont positives à chaque itération
 xj = uj est variable de base et yj = 0 est variable hors base. b) xj = 0 est variable hors base et yj = uj est variable de base. c) 0 < xj < uj est variable de base et 0 < yj < uj est variable de base. Non dégénérescence: toutes les variables de. base sont positives à. chaque itération.")
65
m + n variables de base requises
il y a n variables yj Il y a au moins m variables xj dans la base Exactement m variables xj satisfont 0 < xj < uj. En effet, si m0 m variables xj satisfaisaient la relation, alors les m0 variables yj correspondantes seraient également dans la base. De plus, pour les n – m0 autres indices j xj = uj (cas a) ou bien yj = uj (cas b) serait vérifié. Alors le nombre de variables de base serait égal à 2m0 + (n – m0) = n + m n + m
 ou bien yj = uj (cas b) serait. vérifié. Alors le nombre de variables de base. serait égal à. 2m0 + (n – m0) = n + m0 n + m.")
66
La base a donc la forme suivante
0 < xj < uj 0 < yj < uj xj=uj yj=uj

67
La base a donc la forme suivante
Base de A Les colonnes de la base B de A correspondent aux variables 0<xj<uj n 0 < xj < uj 0 < yj < uj xj=uj yj=uj

68
Ainsi, nous pouvons développer une variante du simplexe pour résoudre directement le problème
en traitant implicitement les bornes supérieures uj. À chaque itération, nous allons considérer une solution (de base) associée à une base B de A ayant m variables de base n – m variables hors base
 associée à une base B de A ayant. m variables de base. n – m variables hors base.")
69
n – m variables hors base .
À chaque itération, nous allons considérer une solution (de base) associée à une base B de A ayant m variables de base n – m variables hors base Si on dénote les indices des variables de base IB = {j1, j2, …, jm} où ji est l’indice de la variable de base dans la iième ligne, alors La valeur de la fonction économique est Nous retrouvons les mêmes expressions que pour les problèmes sans bornes sauf que les variables hors base
 associée à une base B de A ayant. m variables de base. n – m variables hors base . Si on dénote les indices des variables de base IB = {j1, j2, …, jm} où ji est l’indice de la variable de base dans la iième ligne, alors. La valeur de la fonction économique est. Nous retrouvons les. mêmes expressions que. pour les problèmes sans. bornes sauf que les. variables hors base.")
70
Il suffit d’ajuster les critères d’entrée et de
sortie en conséquence pour retrouver la variante du simplexe. Nous retrouvons les même expressions que pour les problèmes sans bornes sauf que les variables hors base

71
Étape 1: Choix de la variable d’entrée
Le critère pour choisir la variable d’entrée est modifié pour tenir compte des variables hors base xj à leur borne supérieure uj qui peuvent diminuer. Ainsi, pour un indice si , il est avantageux d’augmenter xj si , il est avantageux de diminuer xj Déterminons et Soit Si , alors la solution est optimale et l’algorithme s’arrête. Si , alors la variable xs augmente; aller à l’étape 2.1. Si , alors la variable xs diminue; aller à l’étape 2.2

72
Étape 2.1: Choix de la variable de sortie
L’augmentation de la variable d’entrée xs est limitée par la première des trois situations suivantes qui se produit: i) xs atteint sa borne sup. us ii) une variable de base décroît à 0 (dans ce cas ) iii) une variable de base augmente pour atteindre sa borne sup (dans ce cas ) Soit Si θ = ∞, alors le problème n’est pas borné inférieurement et l’algorithme s’arrête.
 xs atteint sa borne sup. us. ii) une variable de base. décroît à 0 (dans ce cas ) iii) une variable de base. augmente pour atteindre sa. borne sup. (dans ce cas. ) Soit. Si θ = ∞, alors le problème n’est pas. borné inférieurement et l’algorithme. s’arrête.")
73
Étape 2.1: Choix de la variable de sortie
L’augmentation de la variable d’entrée xs est limitée par la première des trois situations suivantes qui se produit: i) xs atteint sa borne sup. us ii) une variable de base décroît à 0 (dans ce cas ) iii) une variable de base augmente pour atteindre sa borne sup (dans ce cas ) Soit Si θ = us, alors l’ensemble des variables de base reste le même et la même base est utilisée à la prochaine itération. La variable xs demeure hors base hors et sa valeur passe de 0 à us. Retourner à l’étape 1.
 xs atteint sa borne sup. us. ii) une variable de base. décroît à 0 (dans ce cas ) iii) une variable de base. augmente pour atteindre sa. borne sup. (dans ce cas. ) Soit. Si θ = us, alors l’ensemble des variables. de base reste le même et la même base est. utilisée à la prochaine itération. La variable xs demeure hors base hors. et sa valeur passe de 0 à us. Retourner à l’étape 1.")
74
Étape 2.1: Choix de la variable de sortie
L’augmentation de la variable d’entrée xs est limitée par la première des trois situations suivantes qui se produit: i) xs atteint sa borne sup. us ii) une variable de base décroît à 0 (dans ce cas ) iii) une variable de base augmente pour atteindre sa borne sup (dans ce cas ) Soit Si alors la valeur de la variable d’entrée xs augmente à θ. La variable d’entrée xs devient variable de base à la place de la variable de sortie Pivoter sur et retourner à l’étape 1
 xs atteint sa borne sup. us. ii) une variable de base. décroît à 0 (dans ce cas ) iii) une variable de base. augmente pour atteindre sa. borne sup. (dans ce cas. ) Soit. Si. alors la valeur de la variable d’entrée xs. augmente à θ. La variable d’entrée xs devient variable de. base à la place de la variable de sortie . Pivoter sur et retourner à l’étape 1.")
75
Étape 2.1: Choix de la variable de sortie
L’augmentation de la variable d’entrée xs est limitée par la première des trois situations suivantes qui se produit: i) xs atteint sa borne sup. us ii) une variable de base décroît à 0 (dans ce cas ) iii) une variable de base augmente pour atteindre sa borne sup (dans ce cas ) Soit Si alors la valeur de la variable d’entrée xs augmente à θ. La variable d’entrée xs devient variable de base à la place de la variable de sortie Pivoter sur et retourner à l’étape 1
 xs atteint sa borne sup. us. ii) une variable de base. décroît à 0 (dans ce cas ) iii) une variable de base. augmente pour atteindre sa. borne sup. (dans ce cas. ) Soit. Si. alors la valeur de la variable d’entrée xs. augmente à θ. La variable d’entrée xs devient variable de. base à la place de la variable de sortie . Pivoter sur et retourner à l’étape 1.")
76
Étape 2.2: Choix de la variable de sortie
La réduction de la valeur de la variable d’entrée xs est limitée par la première des trois situations suivantes qui se produit: i) xs atteint sa borne inf. 0 ii) une variable de base décroît à 0 (dans ce cas ) iii) une variable de base augmente pour atteindre sa borne sup (dans ce cas ) Soit Si θ = us, alors l’ensemble des variables de base reste le même et la même base est utilisée à la prochaine itération. La variable xs demeure hors base hors et sa valeur passe de us à 0. Retourner à l’étape 1.
 xs atteint sa borne inf. 0. ii) une variable de base. décroît à 0 (dans ce cas ) iii) une variable de base. augmente pour atteindre sa. borne sup. (dans ce cas. ) Soit. Si θ = us, alors l’ensemble des variables. de base reste le même et la même base est. utilisée à la prochaine itération. La variable xs demeure hors base hors. et sa valeur passe de us à 0. Retourner à l’étape 1.")
77
Étape 2.2: Choix de la variable de sortie
La réduction de la valeur de la variable d’entrée xs est limitée par la première des trois situations suivantes qui se produit: i) xs atteint sa borne inf. 0 ii) une variable de base décroît à 0 (dans ce cas ) iii) une variable de base augmente pour atteindre sa borne sup (dans ce cas ) Soit Si alors la valeur de la variable d’entrée xs est réduite de θ (i.e., xs← us– θ). La variable d’entrée xs devient variable de base à la place de la variable de sortie Pivoter sur et retourner à l’étape 1
 xs atteint sa borne inf. 0. ii) une variable de base. décroît à 0 (dans ce cas ) iii) une variable de base. augmente pour atteindre sa. borne sup. (dans ce cas. ) Soit. Si. alors la valeur de la variable d’entrée xs. est réduite de θ (i.e., xs← us– θ). La variable d’entrée xs devient variable de. base à la place de la variable de sortie . Pivoter sur et retourner à l’étape 1.")
78
Étape 2.2: Choix de la variable de sortie
La réduction de la valeur de la variable d’entrée xs est limitée par la première des trois situations suivantes qui se produit: i) xs atteint sa borne inf. 0 ii) une variable de base décroît à 0 (dans ce cas ) iii) une variable de base augmente pour atteindre sa borne sup (dans ce cas ) Soit Si alors la valeur de la variable d’entrée xs et réduite de θ (i.e., xs← us– θ). La variable d’entrée xs devient variable de base à la place de la variable de sortie Pivoter sur et retourner à l’étape 1
 xs atteint sa borne inf. 0. ii) une variable de base. décroît à 0 (dans ce cas ) iii) une variable de base. augmente pour atteindre sa. borne sup. (dans ce cas. ) Soit. Si. alors la valeur de la variable d’entrée xs. et réduite de θ (i.e., xs← us– θ). La variable d’entrée xs devient variable de. base à la place de la variable de sortie . Pivoter sur et retourner à l’étape 1.")
79
Domaine réalisable L’ensemble des points réalisables pour le système
5x + 3y ≤ 30 2x + 3y ≤ 24 1x + 3y ≤ 18 x,y≥0 x ≤ 4

Présentations similaires









, de constantes (0, 1), d’opérations (+, ), de relations (=, ) Axiomes : ce sont.>")









