Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Contrôle-Sanction automatisé Vitesse moyenne sur un parcours
Lecteur aval 70 Lecteur amont

2
Politique de sécurité routière Contrôle-sanction
Là où se produisent beaucoup d'accidents corporels, Là où la vitesse est souvent en cause Là où les contrôles sont difficiles à réaliser avec les moyens humains, Selon une logique d'axes, pour mailler le territoire routier français.

3
Expérience aux Pays-Bas
Selon la police hollandaise, les automobilistes trouvent que ce contrôle basé sur le temps de parcours est juste, car, s’appliquant à une vitesse moyenne, il punit un excès de vitesse substantiel, persistant et conscient, et non pas un excès ponctuel et aléatoire comme cela peut-être le cas avec une mesure de vitesse instantanée par radar.

4
Objectifs Faisabilité technique (Technologie, environnement,...)
Faisabilité juridique (Cadre législatif, Preuves suffisantes,...) Facilité d’usage (Installation, opérations, formation,...) Evaluer les contraintes métrologiques et d’homologation Préparer la Procédure d’homologation
 Facilité d’usage (Installation, opérations, formation,...) Evaluer les contraintes métrologiques et d’homologation Préparer la Procédure d’homologation.")
5
Principe fonctionnel Un contrôle occasionnel Un contrôle déplaçable
Un itinéraire calibré 2 photos horodatées Une fiche regroupant les preuves

6
Principes organiques Matériel transportable (auto-localisation, coffret fermé, fixation universelle,) Matériel autonome (batterie, communication sans fil) Procédure automatisée (hors liaison avec le CNT) Mise en oeuvre avec auto-étalonnage de l’itinéraire Standardisation des interfaces Interopérabilité Lecteurs /superviseur (NFP99340)
 Procédure automatisée (hors liaison avec le CNT) Mise en oeuvre avec auto-étalonnage de l’itinéraire. Standardisation des interfaces. Interopérabilité Lecteurs /superviseur (NFP99340)")
7
70 Superviseur embarqué 90 70 B A Superviseur embarqué
GPS GPRS Wifi Superviseur embarqué 90 70 B A Lecteur aval GPS GPRS Wifi GPS GPRS Wifi Superviseur embarqué GPS GPRS Wifi Superviseur embarqué GPS GPRS Wifi Superviseur embarqué 70 GPS GPRS Wifi Superviseur embarqué GPS GPRS Wifi Superviseur embarqué Lecteur amont GPS GPRS Wifi

8
Vitesse moyenne maximale admissible: 58,2 km/h
Le temps de parcours minimal compatible avec les prescriptions de vitesse sur l'itinéraire de 4,871 km cartographié ci-dessous est déterminé par les éléments suivants : 900m à 90km/h : 108,8s 1512m à 50km/h: 52,6s 1024m à 70km/h: 103,3s 1435m à 50km/h: 300,8s Total : 5mn00s Distance 4871m Vitesse moyenne maximale admissible: 58,2 km/h 90 70 A

9
Photo en A Photo en B Je 21/12/2005 23:59:59,2
RD64 entre Aix en Provence et Roquefavour N° 1400YX60 Coordonnées GPS: , Appareil de prise de vue XZYBGH Photo en A Je 21/12/ :59:59,2 RD18 entre Eguilles et Les Milles N° 1400YX60 Coordonnées GPS: , Appareil de prise de vue JKLGHNB Photo en B

10
le véhicule immatriculé 1400YX60
Constat : Le 21 décembre 2005 à 23h59, le véhicule immatriculé 1400YX60 a parcouru le trajet défini sur la cartographie ci-dessous en 4mn00s, soit une moyenne de 64,9 km/h, supérieure de 11,5% à la vitesse moyenne maximale autorisée.

11
L'appareil de prise de vue XZYBGH a été homologué par
La distance entre A et B par la route a été mesurée par le système ffff, homologué par le service zzzz, le 12/01/2004 sous le n° L'appareil de prise de vue XZYBGH a été homologué par le service xxxxx, le 12/01/2004 sous le n° L'appareil de prise de vue XZYBGH a été homologué par le service xxxxx, le 12/01/2004 sous le n°

12
Constat de vitesse moyenne
effectué par la Gendarmerie Nationale, Brigade de Aiguilles 13050 Constat : Le 21 décembre 2005 entre 23h52 et 26h59, le véhicule immatriculé 1400YX60 a parcouru le trajet défini sur la cartographie ci-dessous en 4mn00s, soit une moyenne de ,9 km/h, supérieure de 11,5% à la vitesse moyenne maximale autorisée sur ce trajet. 90 70 B A Le temps de parcours minimal compatible avec les prescriptions de vitesse sur l'itinéraire de 4,871 km cartographié ci-contre est déterminé par les éléments suivants : 900m à 90km/h : 108,8s 1512m à 50km/h: 52,6s 1024m à 70km/h: 103,3s 1435m à 50km/h: 300,8s Total : 5mn00s Distance 4871m Vitesse moyenne maximale admissible: 58,2 km/h Je 21/12/ :59:59,2 RD18 entre Eguilles et Les Milles N° 1400YX60 Coordonnées GPS: , Appareil de prise de vue JKLGHNB Je 21/12/ :52:59,2 RD64 entre Aix en Provence et Roquefavour N° 1400YX60 Coordonnées GPS: , Appareil de prise de vue XZYBGH La distance entre A et B par la route a été mesurée par le système ffff, homologué par le service zzzz le 12/01/2004 sous le n° L'appareil de prise de vueXZYBGH a été homologué par le service xxxxx le 12/01/2004 sous le n°

13
Modes de fonctionnement
Test local / Formation Vérification d’installations Calibrage du trajet Campagne de contrôles (envoi des fiches de contravention) Maintenance
 Maintenance.")
14
Mode opérationnel Echanges de données cryptées
Envoi des n° de plaque au fil de l’eau Calcul temps de parcours TP Si TP> temps mini : effacement des plaques Si TP< temps mini : alerte opérateur récupération des 2 photos établissement de la fiche d’infraction archivage ou envoi de la fiche

15
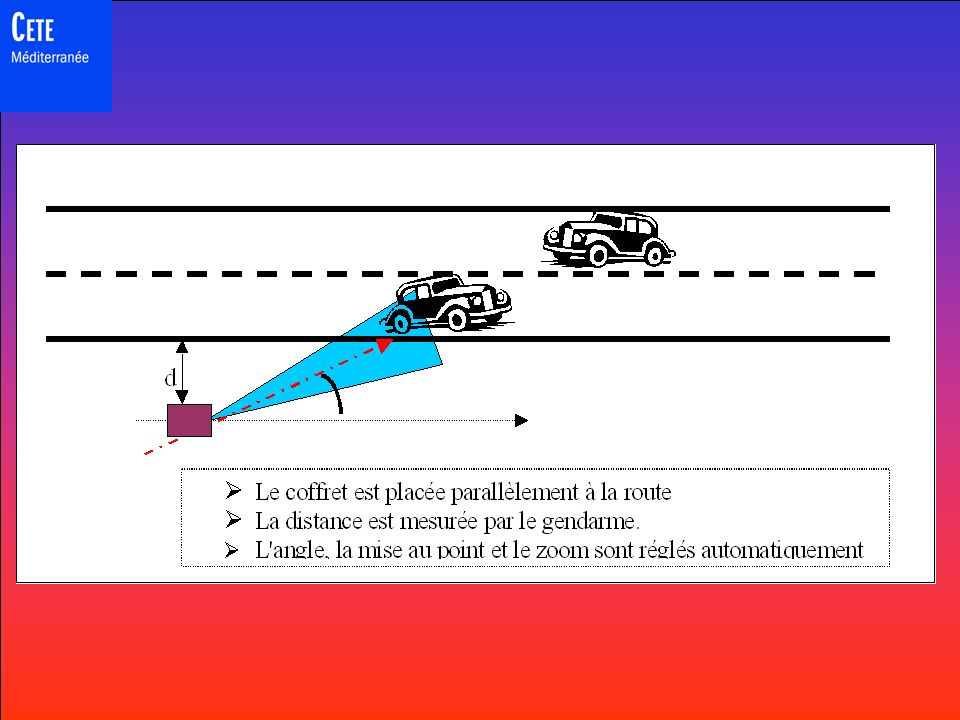
Objectif (zoom, distance)
GPRS (pendant la campagne: données/photos des contrevenants) WiFi (contrôle à la mise en oeuvre: vidéo/photos/données) Fixation universelle Face en composite GPS (localisation sur la carte) Coffret inviolable (10kg) PC industriel Vitre Projecteur infrarouge Objectif (zoom, distance) Caméra (PAL numérisé IEEE 1394) Tourelle (Site, azimut) Batterie (Li-ion)
 WiFi (contrôle à la mise en oeuvre: vidéo/photos/données) Fixation universelle. Face en composite. GPS (localisation sur la carte) Coffret inviolable (10kg) PC industriel. Vitre. Projecteur infrarouge. Objectif (zoom, distance) Caméra (PAL numérisé IEEE 1394) Tourelle (Site, azimut) Batterie (Li-ion)")
16
Diginext - Provisoire

18
Support de panneau de police Fût cylindrique
entre 10 et 20 cm circulation Coffret axe optique Fût cylindrique circulation entre 10 et 40 cm Coffret axe optique environ 15 cm Glissière en béton armé - GBA Coté Circulation Coffret vue en coupe transversale coupe horizontale Coffret entre 10 et 30 cm vue en coupe transversale axe optique Inclinaison envisageable si nécessaire circulation Rambarde de pont Coffret Glissière métallique Coffret Bas coté/trottoir

19
Domaines d’utilisation du CSA-VMD
Rase campagne (RN, RD, RC) Longs boulevards urbains Chantiers autoroutiers De jour ou de nuit Performances du prototype limitées
 Longs boulevards urbains. Chantiers autoroutiers. De jour ou de nuit. Performances du prototype limitées.")
20
Planning Merci de votre attention...
2005 Accord du Comité Technique de la DPICA 2005 Rédaction du CCTP et consultation 2006 Dossier de fabrication 2007 Livraison du prototype / premières expérimentation 2008 Rapport et présentations à la DPICA Merci de votre attention...

21
Calcul de la distance Objectif non critique Méthode externe
par Odomètre homologué (roulette à main dangereuse, pas de cartographie,...) Méthode de Kalmann le Filtre de KALMAN pour signaux numériques produit une représentation d'état du processus. le vecteur d'état du processus est l'information que l'on cherche à extraire du bruit additionnel. le filtre de KALMAN donne la prédiction ou l’estimation du vecteur d’état. Lorsque les variances des bruits sont connues, c’est le meilleur observateur. Méthode itérative « harmonique » Réduction progressive des angles du linéaire tracé sur les points GPS, jusqu'à ce que les angles entre deux segments successifs soient tous de même signe ou nuls. Méthode par map-matching Avec préparation de mission préalable.
 Méthode de Kalmann. le Filtre de KALMAN pour signaux numériques produit une représentation d état du processus. le vecteur d état du processus est l information que l on cherche à extraire du bruit additionnel. le filtre de KALMAN donne la prédiction ou l’estimation du vecteur d’état. Lorsque les variances des bruits sont connues, c’est le meilleur observateur. Méthode itérative « harmonique » Réduction progressive des angles du linéaire tracé sur les points GPS, jusqu à ce que les angles entre deux segments successifs soient tous de même signe ou nuls. Méthode par map-matching. Avec préparation de mission préalable.")
22
Méthode itérative Chaque points GPS est déplacé en faisant la moyenne des angles déterminés par les vecteurs ayant pour origine le point précédent et pour extrémité le point en question et les n points suivants. Le nombre d'itérations pour satisfaire à la condition énoncée dépend de la précision dans le calcul, puisqu'au niveau d'un point d'inflexion, il faut qu'il y ait au moins un angle nul entre 2 vecteurs successifs. En considérant que les points GPS sont statistiquement éparpillés autour de la trajectoire réelle, la méthode conduit mathématiquement à une distance calculée inférieure à la distance réelle.

24
Test Diginext

25
Zoom sur test Diginext

26
Test Diginext Autoroute

27
Itinéraire dégagé

28
Extraits de la Table des formats LCR...

Présentations similaires