Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Augmented Reality Toolkit
ARToolkit N G U K Y E E T N T Y P O N J R O O N Y A T H A N Augmented Reality Toolkit

2
Ce que nous allons présenter…
Introduction Architecture Installation Principes de développement Tout ce qu’on peut faire avec… Limitations Outils autour de ARToolkit Demo NGUYEN Ketty & PONROY Jonathan = 2 =

3
En quelques mots… Librairie C/C++ avec des outils vidéo
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo En quelques mots… Librairie C/C++ avec des outils vidéo Fonctions prédéfinies Utilisation des différents outils Réalité augmentée en temps réel Introduction d’objets 3D dans le monde réel par marqueurs NGUYEN Ketty & PONROY Jonathan = 3 =

4
Architecture OpenGL pour le rendu
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Architecture OpenGL pour le rendu GLUT pour les évènements et dépendance hardware de la librairie video API standard sur chaque platform (e.g win32 pour Windows) NGUYEN Ketty & PONROY Jonathan = 4 =
 NGUYEN Ketty & PONROY Jonathan = 4 =")
5
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo
Structure L’utilisateur peut facilement remplacer un module par un autre Flux de données NGUYEN Ketty & PONROY Jonathan = 5 =

6
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo
Le site (section documentation setup ARToolkit) donne la liste des éléments à télécharger ARToolkit Glut Librairies pour la webcam ReadMe disponible pour chaque application expliquant toute la procédure à suivre Multi-plateforme : Windows, Linux et Mac NGUYEN Ketty & PONROY Jonathan = 6 =
 donne la liste des éléments à télécharger. ARToolkit. Glut. Librairies pour la webcam. ReadMe disponible pour chaque application expliquant toute la procédure à suivre. Multi-plateforme : Windows, Linux et Mac. NGUYEN Ketty & PONROY Jonathan = 6 =")
7
Principes de développement
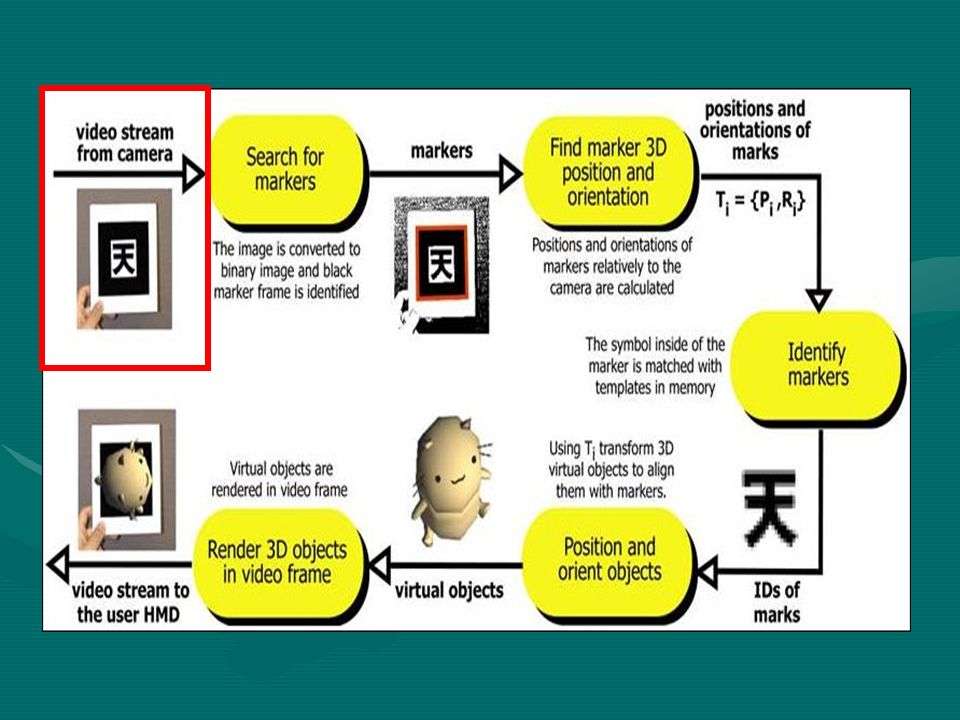
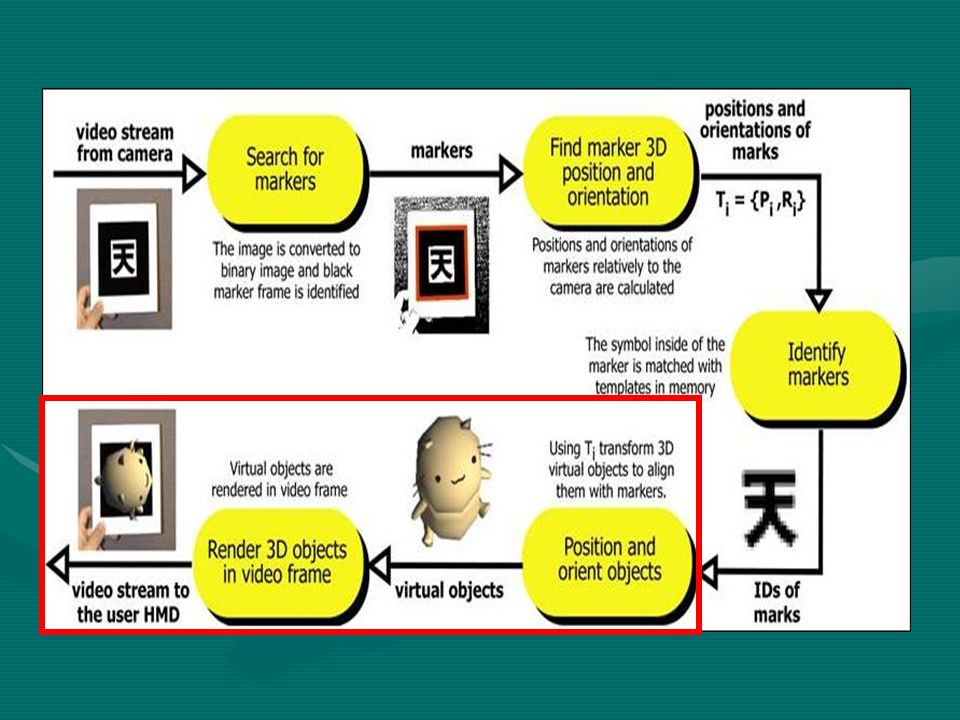
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Principes de développement Le fonctionnement global NGUYEN Ketty & PONROY Jonathan = 7 =

8
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo
Chargement d'une image static void mainLoop(void) { static int contF = 0; ARUint *dataPtr; ARMarkerInfo *marker_info; int marker_num; int j, k; /* grab a vide frame */ if( (dataPtr = (ARUint8 *)arVideoGetImage()) == NULL ) arUtilSleep(2); return; } if( count == 0 ) arUtilTimerReset(); count++; argDrawMode2D(); ... NGUYEN Ketty & PONROY Jonathan = 8 =
 { static int contF = 0; ARUint8 *dataPtr; ARMarkerInfo *marker_info; int marker_num; int j, k; /* grab a vide frame */ if( (dataPtr = (ARUint8 *)arVideoGetImage()) == NULL ) arUtilSleep(2); return; } if( count == 0 ) arUtilTimerReset(); count++; argDrawMode2D(); ... NGUYEN Ketty & PONROY Jonathan = 8 =")
9
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo
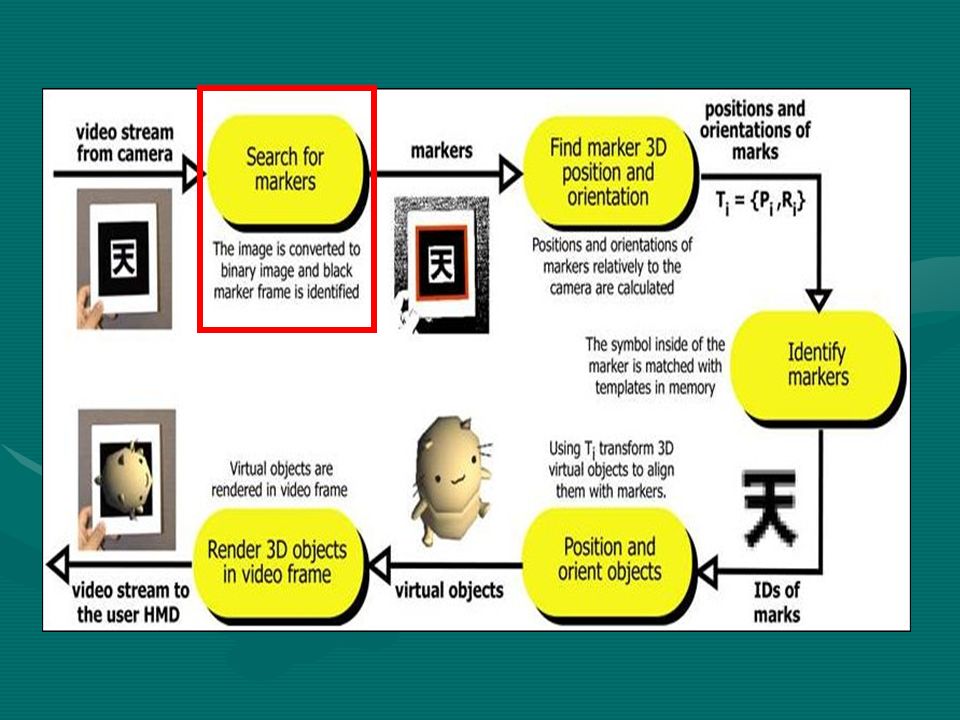
Détection du marqueur ..... /* grab a vide frame */ if( (dataPtr = (ARUint8 *)arVideoGetImage()) == NULL ) { arUtilSleep(2); return; } if( count == 0 ) arUtilTimerReset(); count++; argDrawMode2D(); argDispImage( dataPtr, 0,0 ); /* detect the markers in the video frame */ if( arDetectMarker(dataPtr, thresh, &marker_info, &marker_num) < 0 ) { cleanup(); exit(0); arVideoCapNext(); NGUYEN Ketty & PONROY Jonathan = 9 =
arVideoGetImage()) == NULL ) { arUtilSleep(2); return; } if( count == 0 ) arUtilTimerReset(); count++; argDrawMode2D(); argDispImage( dataPtr, 0,0 ); /* detect the markers in the video frame */ if( arDetectMarker(dataPtr, thresh, &marker_info, &marker_num) < 0 ) { cleanup(); exit(0); arVideoCapNext(); NGUYEN Ketty & PONROY Jonathan = 9 =")
10
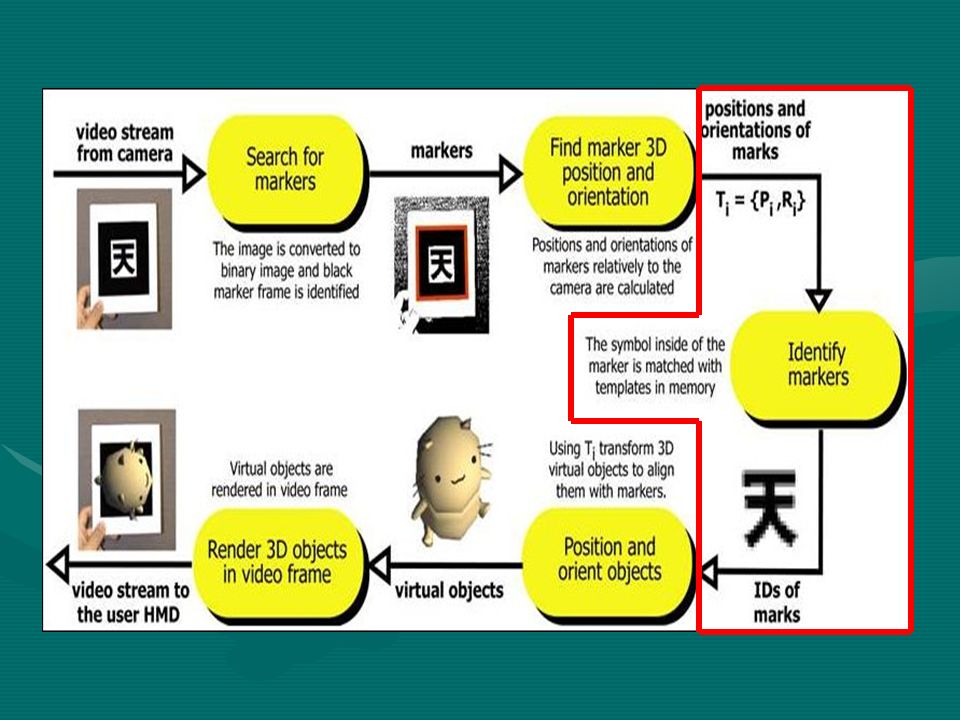
Reconnaissance du symbole
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Reconnaissance du symbole .... if( arDetectMarker(dataPtr, thresh, &marker_info, &marker_num) < 0 ) { cleanup(); exit(0); } arVideoCapNext(); /* check for object visibility */ k = -1; for( j = 0; j < marker_num; j++ ) { if( patt_id == marker_info[j].id ) { if( k == -1 ) k = j; else if( marker_info[k].cf < marker_info[j].cf ) k = j; if( k == -1 ) { NGUYEN Ketty & PONROY Jonathan = 10 =
 < 0 ) { cleanup(); exit(0); } arVideoCapNext(); /* check for object visibility */ k = -1; for( j = 0; j < marker_num; j++ ) { if( patt_id == marker_info[j].id ) { if( k == -1 ) k = j; else if( marker_info[k].cf < marker_info[j].cf ) k = j; if( k == -1 ) { NGUYEN Ketty & PONROY Jonathan = 10 =")
11
Calcul de la matrice de transformation
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Calcul de la matrice de transformation .... /* check for object visibility */ /* get the transformation between the marker and the real camera */ arGetTransMat(&marker_info[k], patt_center, patt_width, patt_trans); draw(); argSwapBuffers(); } NGUYEN Ketty & PONROY Jonathan = 11 =
; draw(); argSwapBuffers(); } NGUYEN Ketty & PONROY Jonathan = 11 =")
12
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo
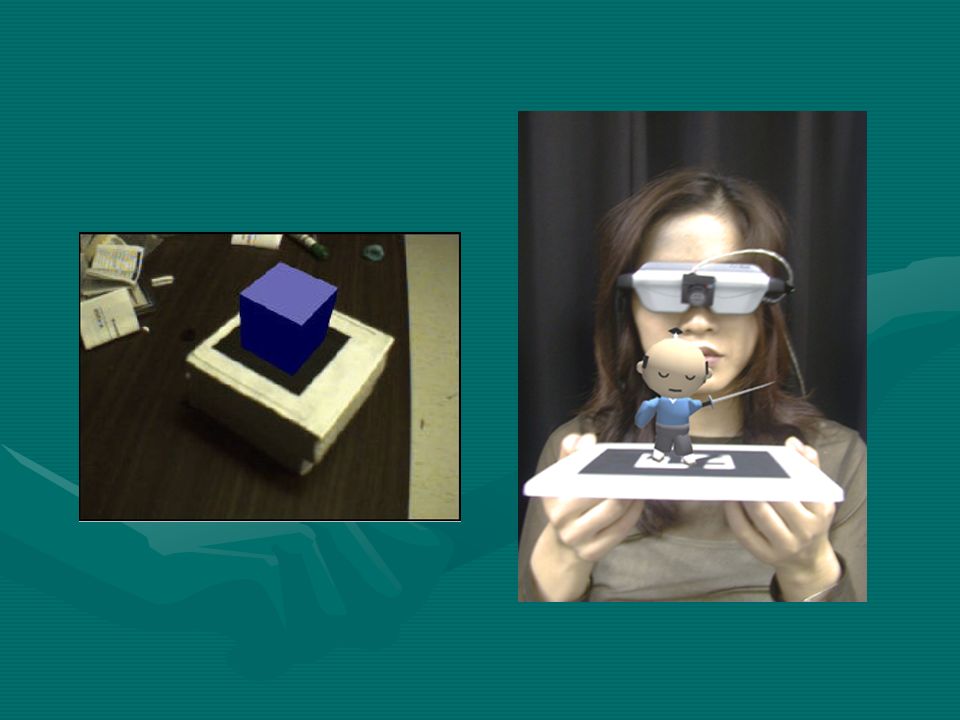
Ajout des objets 3D static void draw( void ) { .... /* load the camera transformation matrix */ argConvGlpara(patt_trans, gl_para); glMatrixMode(GL_MODELVIEW); glLoadMatrixd( gl_para ); glEnable(GL_LIGHTING); glEnable(GL_LIGHT0); glLightfv(GL_LIGHT0, GL_POSITION, light_position); glLightfv(GL_LIGHT0, GL_AMBIENT, ambi); glLightfv(GL_LIGHT0, GL_DIFFUSE, lightZeroColor); glMaterialfv(GL_FRONT, GL_SPECULAR, mat_flash); glMaterialfv(GL_FRONT, GL_SHININESS, mat_flash_shiny); glMaterialfv(GL_FRONT, GL_AMBIENT, mat_ambient); //glTranslatef( 0.0, 0.0, 25.0 ); glTranslatef( 0, 0, 25.0 ); glutSolidCube(50.0); glDisable( GL_LIGHTING ); glDisable( GL_DEPTH_TEST ); NGUYEN Ketty & PONROY Jonathan = 12 =
 { .... /* load the camera transformation matrix */ argConvGlpara(patt_trans, gl_para); glMatrixMode(GL_MODELVIEW); glLoadMatrixd( gl_para ); glEnable(GL_LIGHTING); glEnable(GL_LIGHT0); glLightfv(GL_LIGHT0, GL_POSITION, light_position); glLightfv(GL_LIGHT0, GL_AMBIENT, ambi); glLightfv(GL_LIGHT0, GL_DIFFUSE, lightZeroColor); glMaterialfv(GL_FRONT, GL_SPECULAR, mat_flash); glMaterialfv(GL_FRONT, GL_SHININESS, mat_flash_shiny); glMaterialfv(GL_FRONT, GL_AMBIENT, mat_ambient); //glTranslatef( 0.0, 0.0, 25.0 ); glTranslatef( 0, 0, 25.0 ); glutSolidCube(50.0); glDisable( GL_LIGHTING ); glDisable( GL_DEPTH_TEST ); NGUYEN Ketty & PONROY Jonathan = 12 =")
13
Tout ce qu'on peut faire avec ...
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Tout ce qu'on peut faire avec ... Utiliser plusieurs patterns simultanément Un fichier contient l’ensemble des patterns à reconnaître pendant la session Description du pattern comme suit Nom Fichier du pattern Largeur du marqueur Centre du marqueur Ex: #pattern1 cone Data/patt.hiro 80.0 NGUYEN Ketty & PONROY Jonathan = 13 =

14
Créer ses propres patterns avec bin/mk_patt
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Créer ses propres patterns avec bin/mk_patt NGUYEN Ketty & PONROY Jonathan = 14 =

15
Utilisation du pattern au niveau du code
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Utilisation du pattern au niveau du code char *patt_name = "Data/patt.hiro"; ..... static void init( void ) { .... arParamChangeSize( &wparam, xsize, ysize, &cparam ); arInitCparam( &cparam ); printf("*** Camera Parameter ***\n"); arParamDisp( &cparam ); if( (patt_id=arLoadPatt(patt_name)) < 0 ) { printf("pattern load error !!\n"); exit(0); } /* open the graphics window */ argInit( &cparam, 1.0, 0, 0, 0, 0 ); NGUYEN Ketty & PONROY Jonathan = 15 =
 { .... arParamChangeSize( &wparam, xsize, ysize, &cparam ); arInitCparam( &cparam ); printf( *** Camera Parameter ***\n ); arParamDisp( &cparam ); if( (patt_id=arLoadPatt(patt_name)) < 0 ) { printf( pattern load error !!\n ); exit(0); } /* open the graphics window */ argInit( &cparam, 1.0, 0, 0, 0, 0 ); NGUYEN Ketty & PONROY Jonathan = 15 =")
16
Deux types de calibration (one step, two step)
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Calibrer la caméra Deux types de calibration (one step, two step) Two step Imprimer calib_cpara.pdf et calib_dist.pdf Lancer calib_dist avant calib_cpara NGUYEN Ketty & PONROY Jonathan = 16 =
 Two step. Imprimer calib_cpara.pdf et calib_dist.pdf. Lancer calib_dist avant calib_cpara. NGUYEN Ketty & PONROY Jonathan = 16 =")
17
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo
calib_dist Prendre une autre image et répéter le processus 5 à 10 fois avec des angles de vues différents pour avoir une calibration plus précise Ce programme donne le facteur de distorsion et les coordonnées du centre de l'image NGUYEN Ketty & PONROY Jonathan = 17 =

18
calib_cparam Pour trouver la focale et autres paramètres
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo calib_cparam Pour trouver la focale et autres paramètres Entrer les données fournies par calib_dist Reculer l’image de la caméra Répéter le processus 5 fois NGUYEN Ketty & PONROY Jonathan = 18 =

19
Espacement entre les points : 40mm
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Pour personnaliser… Par défaut Espacement entre les points : 40mm Distance d’éloignement à la caméra : 100mm Nombre de fois à répéter la procédure : 5 inter_coord[k][j][i+7][0] = 40.0*i; inter_coord[k][j][i+7][1] = 40.0*j; inter_coord[k][j][i+7][2] = 100.0*k; *loop_num = 5; NGUYEN Ketty & PONROY Jonathan = 19 =

20
Limitations Limitations matérielles Reconnaissance de pattern
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Limitations Limitations matérielles Reconnaissance de pattern Ne pas cacher la moindre zone du pattern Etre dans de bonnes conditions lumineuses Avoir des patterns simples Une vue proche du pattern révèle des sauts si la fonction d'historique n'est pas utilisée Détection de patterns2D et pas patterns3D NGUYEN Ketty & PONROY Jonathan = 20 =

21
Outils autour de ARToolkit
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Outils autour de ARToolkit Modules supplémentaires Module de support du VRML Outils de création de nouveaux patterns Adaptations Adaptation pour java Adaptation pour pocket pc Version pour matlab Améliorations Version améliorée de ARToolkit NGUYEN Ketty & PONROY Jonathan = 21 =

22
Améliorations Site sur ARToolkit Plus : Real-time Augmented Reality:
Qu’est-ce Architecture Installation Développement Possibilités Limitations Outils Demo Améliorations Site sur ARToolkit Plus : Amélioration sur conditions de luminosité graz.ac.at/handheld_ar/artoolkitplus.php Real-time Augmented Reality: Système de tracking robuste NGUYEN Ketty & PONROY Jonathan = 22 =

23
Qu’est-ce Architecture Installation Développement Possibilités Outils Limitations Demo
NGUYEN Ketty & PONROY Jonathan = 23 =

Présentations similaires










 version du 7 Mars 2011 Temps : 4h A imprimer afin de pouvoir le suivre et noter.>")







 UE 303 Promo. M2 IST-IE 2005/06 Conception dun système d'information multimédia Architecture trois-tiers : PHP/MySQL &>")

