Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Résolution d’un programme linéaire
Plan Méthode graphique Méthode du Simplexe Exercices d’application

2
PROGRAMME LINÉAIRE FONCTION OBJECTIF Contraintes
Maximiser ou minimiser z = c1x1 +… + cnxn Contraintes a11x1 + … + a1nxn (, =, ) b1 a21x1 + … + a2nxn (, =, ) b2 am1x1 +… + amnxn (, =, ) bm Contraintes de non-négativité xj 0 ; j = 1, 2, 3, … n avec xj variables de décision (inconnues) aij, bi, cj paramètres du programme linéaire
 b1. a21x1 + … + a2nxn (, =, ) b2. am1x1 +… + amnxn (, =, ) bm. Contraintes de non-négativité. xj 0 ; j = 1, 2, 3, … n. avec. xj variables de décision (inconnues) aij, bi, cj paramètres du programme linéaire.")
3
Méthode Graphique Valable si 2 variables de décision seulement.
Le nombre de contraintes est quelconque. Repose sur une représentation des contraintes dans un plan.

4
Contrainte =inégalité à 2 variables
a1x1 + a2x2 <= b ; b > 0, a1 >0, a2 > 0 b/a2 x2 > b Demi-espace admissible <= b b/a1 x1

5
Maximisation sous contraintes
Fonction objectif Zone réalisable x1

6
l’optimum est un des points extrêmes

7
Exemple 1 Maximisation du profit Contrainte de rareté d’une ressource
Contraintes de demande

8
Solution graphique de l’exemple 1
xC xB = 6000 xC = 1400 6000 192’000 4500 Solution optimale 3000 P 1500 SR xB 1500 3000 4500 6000 7500 9000

9
Exemple 2 MAXIMISER z = 3 x1 + 5 x2 Contraintes : x1 4 2 x2 12

10
ZONE DE SOLUTION RÉALISABLE
Zone limitée par les contraintes du problème et par les limites des variables de décision SR x2 8 6 4 2 x1 2 4 6 8 10

11
FONCTION OBJECTIVE Déplacement de la fonction objective à l’intérieur de la zone de solution réalisable pour atteindre un extremum x2 8 Solution optimale x1 = 2 x2 = 6 Max Z = 36 (2,6) 6 4 2 x1 2 4 6 8 10
 x")
12
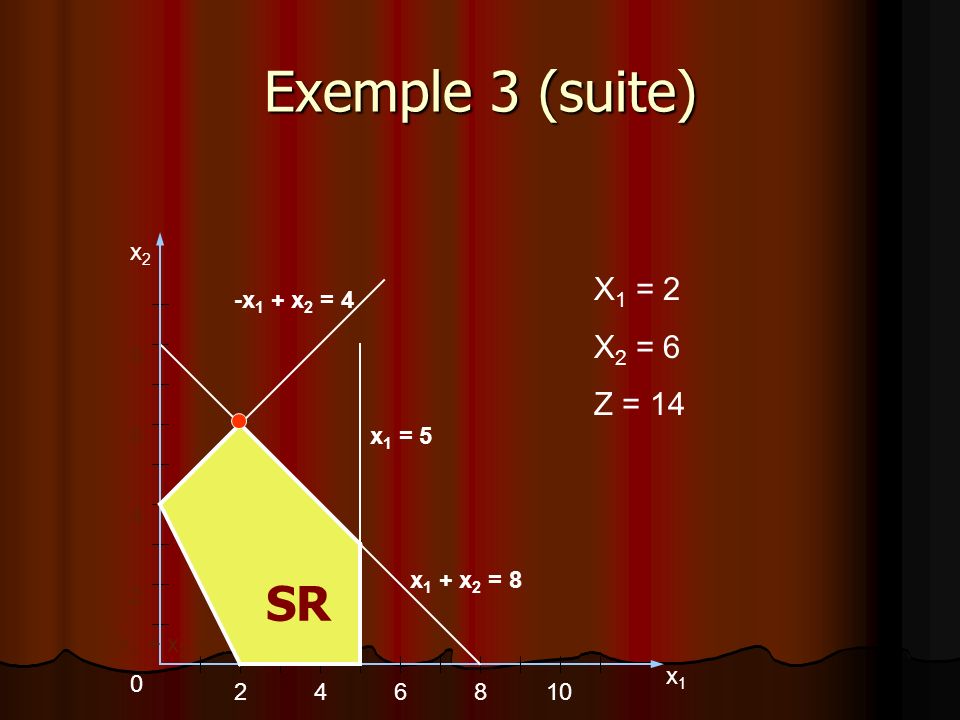
Exemple 3 Maximiser Z = x1 + 2x2 2x1 + x2 4 x1 + x2 8 -x1 + x2 4

13
Exemple 3 (suite) SR X1 = 2 X2 = 6 Z = 14 x2 -x1 + x2 = 4 8 6 x1 = 5 4
2 4 6 8 10
14
Exemple de MINIMISATION
Minimiser Z = x1 – x2 Sachant que : ½ x1 + x2 8 -x1 + 8x2 40 x1 8 x2 8 x1 0, x2 0

15
PROBLÈME DE MINIMISATION
X1 = 8 X2 = 6 Min Z = 2 x2 x2 = 8 8 6 -x1 + 8x2 = 40 SR 4 x1 = 8 2 ½x1 + x2 = 8 2 4 6 8 10 12 14 16 18 20 x1

16
Cas possibles La zone SR peut être : Vide: Contraintes contradictoires
(pas de solution optimale) borné : le problème possède toujours au moins une solution optimale non borné : selon la fonction objectif Si MIN : il y a une solution finie Si MAX : Solution non bornée
 borné : le problème possède toujours au moins une solution optimale. non borné : selon la fonction objectif. Si MIN : il y a une solution finie. Si MAX : Solution non bornée.")
17
Le nombre de solutions optimales ?
Une seule. Une infinité : si deux sommêts réalisent l’optimum (tout le segment reliant les deux sommêts optimaux)
")
18
Méthode du simplexe Méthode algébrique Méthode itérative

19
Etapes Forme standard du PL Tableau de départ du simplexe
Application de l’algorithme du simplexe

20
Forme standard d’un PL Maximiser Z = 7x1 + 5x2 Sachant que : x1 300

21
Inégalités égalités x1 300 x1 + e1 = 300
x1 + x2 x1 + x2 + e3 = 500 2x1 + x2 700 2x1 + x2 + e4 = 700 ei = Variable d’écart.

22
x1 + e1 =300 x2 + e2 = 400 x1 + x2 + e3 = 500 2x1 + x2 + e4 = 700
Maximiser Z = 7x1 + 5x2 Sachant que : x1 + e1 =300 x2 + e2 = 400 x1 + x2 + e3 = 500 2x1 + x2 + e4 = 700 x1 0 ; x2 0 ei 0

24
Tableau de départ du simplexe
1 300 400 500 2 700 Z 7 5

25
Changement de variable

26
Deuxième tableau

27
Changement de variable

28
Troisième tableau

29
Changement de variable

30
Quatrième tableau

31
Solution optimale En base : x1 = 200 e2 = 100 e1 = 100 x2 = 300
e3 = e4 = 0 (hors base) Max Z = 2900
 Max Z =")
Présentations similaires




>")









>")





