Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Mise à Niveau en Recherche Opérationnelle
Première partie Théorie des graphes Mohamed Ali Aloulou Ce transparents ont été élaborés en se basant sur le document de Pierre Lopez, LAAS, Toulouse

2
Plan du cours Qu’est ce qu’on peut faire avec la théorie des graphes ?
Concepts généraux en théorie des graphes Le problème du plus court chemin Problème central de l’ordonnancement Flots et réseaux de transports

3
Pourquoi la théorie des graphes ?
Modélisation Plusieurs problèmes dans différentes disciplines (chimie, biologie, sciences sociales, applications industrielles, …) Un graphe peut représenter simplement la structure, les connexions, les cheminements possibles d’un ensemble complexe comprenant un grand nombre de situations Un graphe est une structure de données puissante pour l’informatique Exemples
 Un graphe peut représenter simplement la structure, les connexions, les cheminements possibles d’un ensemble complexe comprenant un grand nombre de situations. Un graphe est une structure de données puissante pour l’informatique. Exemples.")
4
Concepts généraux en théorie des graphes
Définitions Représentations d’un graphe Coloration des sommets d’un graphe Connexité dans les graphes Graphes particuliers

5
Concepts généraux en théorie des graphes Définitions
Concepts orientés Un graphe G(X,U) est déterminé par Un ensemble X={x1,…,xn} de sommets Un ensemble U={u1, …, um} du produit cartésien X×X d’arcs. Un p-graphe : pas plus que p arcs (xi,xj) Arc u=(xi,xj) boucle 3-graphe 1-graphe = graphe
 est déterminé par. Un ensemble X={x1,…,xn} de sommets. Un ensemble U={u1, …, um} du produit cartésien X×X d’arcs. Un p-graphe : pas plus que p arcs (xi,xj) Arc u=(xi,xj) boucle. 3-graphe. 1-graphe = graphe.")
6
Concepts généraux en théorie des graphes Définitions
Graphes et applications multivoques xj est successeur de xi si (xi,xj)U L’ensemble des successeurs de xi est noté (xi) L’ensemble des prédécesseurs de xi est noté -1(xi) est appelée une application multivoque Pour un 1-graphe, G peut être parfaitement déterminé (ou caractérisé) par (X,)
U. L’ensemble des successeurs de xi est noté (xi) L’ensemble des prédécesseurs de xi est noté -1(xi) est appelée une application multivoque. Pour un 1-graphe, G peut être parfaitement déterminé (ou caractérisé) par (X,)")
7
Concepts généraux en théorie des graphes Définitions
Concepts non orientés On s’intéresse à l’existence d’arcs entre deux sommets sans en préciser l’ordre Arc = arête U est constitué de paires non pas de couples Multigraphe : plusieurs arêtes entre deux sommets Graphe simple = non multigraphe + pas de boucles

8
Concepts généraux en théorie des graphes Définitions
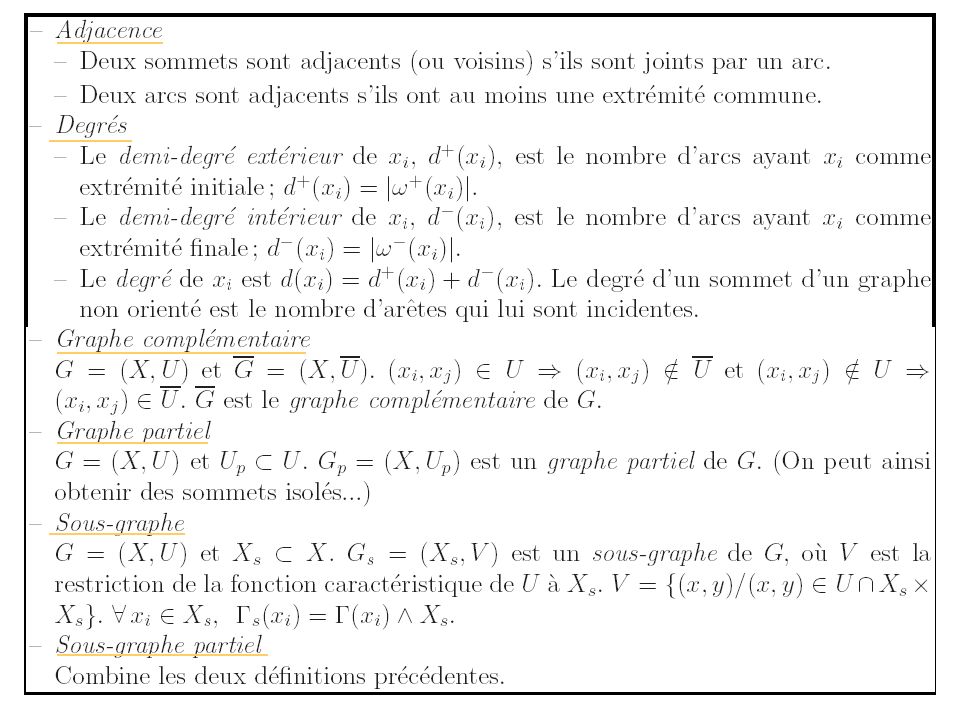
D’autres définitions : Voir Adjacence, degrés, Graphe complémentaire, partiel, sous graphe, sous graphe partiel Graphe réflexif, irréflexif, symétrique, antisymétrique, transitif, complet … définitions

9
Concepts généraux en théorie des graphes Représentations d’un graphe
Matrice d’adjacence Place mémoire : n² Pour un graphe numérisé : remplacer 1 par la valeur de l’arc

10
Concepts généraux en théorie des graphes Représentations d’un graphe
Matrice d’incidence sommets-arcs Place mémoire : n x m

11
Concepts généraux en théorie des graphes Représentations d’un graphe
Listes d’adjacence Place mémoire : n+1+m

12
Concepts généraux en théorie des graphes Coloration d’un graphe

13
Concepts généraux en théorie des graphes Coloration d’un graphe

14
Concepts généraux en théorie des graphes Connexité dans les graphes
Chaîne – Cycle Chemin – Circuit

15
Concepts généraux en théorie des graphes Connexité dans les graphes
Le terme parcours regroupe les chemins, les chaînes, les circuits et les cycles Un parcours peut être élémentaire : tous les sommets sont distincts simple : tous les arcs sont distincts hamiltonien : passe une fois et une seule par chaque sommet eulérien : passe une fois et une seule par chaque arc préhamiltonien : ou moins une fois par chaque sommet préeulérien : au moins une fois par chaque arc

16
Concepts généraux en théorie des graphes Connexité dans les graphes
Exemple Le problème du voyageur de commerce : un voyageur de commerce doit visiter n villes données en passant par chaque ville exactement une fois et doit revenir à la ville de départ. Trouver un circuit hamiltonien de coût minimal dans un graphe valué

17
Concepts généraux en théorie des graphes Connexité dans les graphes

18
Concepts généraux en théorie des graphes Connexité dans les graphes
Forte connexité

19
Concepts généraux en théorie des graphes Graphes particuliers
Graphes sans circuit Décomposition en niveaux Graphe biparti Graphe planaire Hypergraphe Arbre Forêt Arborescence

20
Le problème du plus court chemin
Définition Exemples de formulation avec pcch Principe d’optimalité et conditions d’existence Graphes sans circuit Graphes à valuations positives Algorithme de Moore-Dijkstra (1959) Graphes à valuations quelconques Contre-exemple Algorithme de Bellman-Ford
 Graphes à valuations quelconques. Contre-exemple. Algorithme de Bellman-Ford.")
21
Le problème du plus court chemin Définition

22
Le problème du plus court chemin Exemples
Exemple 1 : Construire une autoroute entre deux villes A et K Arcs = tronçons possibles de l’autoroute Valuation des arcs peut être coût de réalisation correspondant longueur du trajet … A B C D E F H I J K G

23
Le problème du plus court chemin Exemples
Exemple 2 : Chemin le plus fiable dans un réseau de télécommunication Arêtes = liens physiques Valuation des arêtes (i,j) est pij: fiabilité du lien (la probabilité pour que le lien fonctionne) La fiabilité d’un chemin est le produit des probabilités des liens qui le constituent Le problème devient un problème de pcch en remplaçant chaque probabilité par aij = - log pij
 est pij: fiabilité du lien (la probabilité pour que le lien fonctionne) La fiabilité d’un chemin est le produit des probabilités des liens qui le constituent. Le problème devient un problème de pcch en remplaçant chaque probabilité par aij = - log pij.")
24
Le problème du plus court chemin Exemples
Exemple 3 : Problème de sac à dos Un sac à dos de capacité b n objets j=1…n aj : poids de l’objet j pj : profit de l’objet j Objectif : déterminer un sous ensemble d’objets de profit maximal respectant la capacité du sac. Maximiser j pjxj s.c. j aj xj b avec xij = 1 si l’objet est choisi et 0 sinon

25
Le problème du plus court chemin Exemples
Exemple 3 : Problème de sac à dos n(b+1) sommets notés j(k), j=1,2,…,n et k=0,1,…,b Un sommet origine s et un sommet destination t Un sommet j(k) a deux arcs entrants (s’ils existent): Un arc de (j-1)(k) valué par 0 Un arc de (j-1)(k-aj) valué par pj Deux arcs de s vers 1(0) et 1(a1) valués par 0 et p1 Un arc de valuation 0 entre chaque sommet n(k) et t Un chemin de s à j(k) correspond a un sous ensemble des j premiers objets dont le poids total est égal à k. La longueur du chemin est la valeur du sous ensemble
 sommets notés j(k), j=1,2,…,n et k=0,1,…,b. Un sommet origine s et un sommet destination t. Un sommet j(k) a deux arcs entrants (s’ils existent): Un arc de (j-1)(k) valué par 0. Un arc de (j-1)(k-aj) valué par pj. Deux arcs de s vers 1(0) et 1(a1) valués par 0 et p1. Un arc de valuation 0 entre chaque sommet n(k) et t. Un chemin de s à j(k) correspond a un sous ensemble des j premiers objets dont le poids total est égal à k. La longueur du chemin est la valeur du sous ensemble.")
26
Le problème du plus court chemin Principe d’optimalité
aij = longueur de l’arc (i,j) si l’arc existe sinon + uj : longueur du pcch de l’origine 1 vers le sommet j Equations de Bellman u1 =0 uj = min {kj, uk + akj}
 si l’arc existe sinon + uj : longueur du pcch de l’origine 1 vers le sommet j. Equations de Bellman. u1 =0. uj = min {kj, uk + akj}")
27
Le problème du plus court chemin Condition d’existence
Condition d’existence Le graphe n’admet pas de circuit de longueur négative i j k w l(w)<0
<0.")
28
Le problème du plus court chemin Graphes acycliques
Un graphe est acyclique ssi il existe une numérotation des sommets telle qu’un arc existe entre i et j seulement si i < j Les équations de Bellman deviennent u1 =0 uj = min {k < j, uk + akj} -6 3 2 4 2 1 -4 1 2 1 6 5 3 9 3 5 6

29
Le problème du plus court chemin Graphes à valuations positives
Algorithme de Dijkstra : plus court chemin de l’origine à tous les autres sommets Utilise des labels pour les sommets Les labels permanents représentent la valeur du pcch de l’origine jusqu’au sommet correspondant Les labels temporaires représentent une borne supérieure de ce pcch A chaque itération un label temporaire est transformé en label permanent

30
Le problème du plus court chemin Graphes à valuations positives
Algorithme de Dijkstra Etape 0 u1 =0; uj =a1j, pour j=2,…, n P={1}, T={2, …, n} Etape 2 (Désignation du label permanent) Déterminer kT, tq uk=min{j T, uj} T=T\{k} et P=P{k} Si T=vide, stop Etape 3 (Révision des labels temporaires) uj=min{uj, uk+akj} pour tout j T Aller à l’étape 1
 Déterminer kT, tq uk=min{j T, uj} T=T\{k} et P=P{k} Si T=vide, stop. Etape 3 (Révision des labels temporaires) uj=min{uj, uk+akj} pour tout j T. Aller à l’étape 1.")
31
Le problème du plus court chemin Graphes à valuations positives
Exemple A B D C E F H G 2 4 3 1 5 3

32
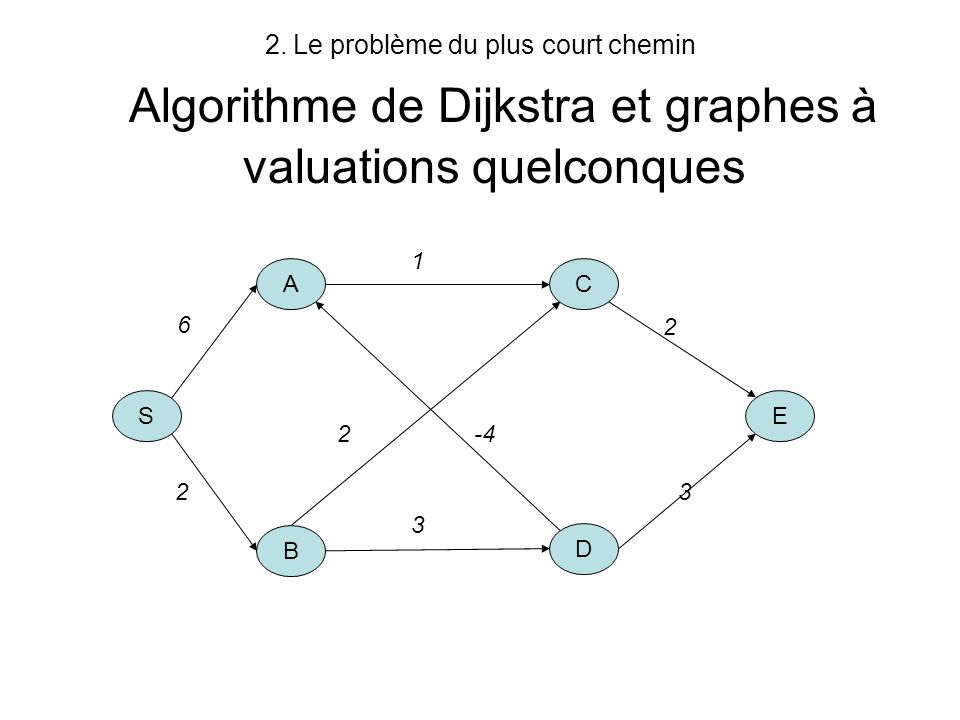
Le problème du plus court chemin Algorithme de Dijkstra et graphes à valuations quelconques
6 1 2 3 -4
33
Le problème du plus court chemin Graphes à valuations quelconques
Algorithme de Bellman-Ford uj(m) = longueur du pcch de 1 vers j tel que le chemin ne contient pas plus que m arcs u1(1)= 0 uj(1) = a1j uj(m+1) = min{uj(m) , min{kj, uk(m) + akj}} Si le graphe ne contient pas de circuit de valeur négative alors uj = uj(n-1)
 = longueur du pcch de 1 vers j tel que le chemin ne contient pas plus que m arcs. u1(1)= 0. uj(1) = a1j. uj(m+1) = min{uj(m) , min{kj, uk(m) + akj}} Si le graphe ne contient pas de circuit de valeur négative alors uj = uj(n-1)")
34
Le problème du plus court chemin Graphes à valuations quelconques
Plus court chemin entre tous les couples de sommets Algorithme matriciel de Floyd-Warshall

35
Le problème central de l’ordonnancement

36
Le problème central de l’ordonnancement Modélisation
Début G K J H D A E F B C O L M N I Fin 1 2 3 4 5 6 7 8 NIVEAU : 8 6 4 1 2 Le niveau d’une tâche X est le plus grand nombre d’arc sur un chemin entre Début et X

37
Le problème central de l’ordonnancement Dates de début au plus tôt
La date début au plus tôt dptôt(i) d’une tâche i = longueur du plus long chemin de la tâche Début (ou 0) à i Formule de récurrence dptôt(i)=maxjPred(i)(dptôt(j)+durée(j)) dptôt(0) =0
 d’une tâche i = longueur du plus long chemin de la tâche Début (ou 0) à i. Formule de récurrence. dptôt(i)=maxjPred(i)(dptôt(j)+durée(j)) dptôt(0) =0.")
38
Le problème central de l’ordonnancement Dates de fin au plus tard
On souhaite terminer le projet au plus tard à la date D=dptôt(n+1) Date de début au plus tard de i = Date maximum à laquelle on peut exécuter i sans retarder le chantier Longueur du plus long chemin de i à Fin (ou n+1) Formule de récurrence dptard(n+1)=D dptard(i)=minjSucc(i)dptard(j)-durée(i)
 Date de début au plus tard de i = Date maximum à laquelle on peut exécuter i sans retarder le chantier. Longueur du plus long chemin de i à Fin (ou n+1) Formule de récurrence. dptard(n+1)=D. dptard(i)=minjSucc(i)dptard(j)-durée(i)")
39
Le problème central de l’ordonnancement Marges, chemin critique
La marge totale d’une tâche i est le retard total qu’on peut se permettre sur i sans remettre en cause la date de fin du projet MT(i)=dptard(i)-dptôt(i). Les tâches critiques ont une marge nulle. Tout retard sur leur exécution entraîne un retard global sur le projet Un chemin est critique s’il relie Début à Fin et s’il ne contient que des tâches critiques
=dptard(i)-dptôt(i). Les tâches critiques ont une marge nulle. Tout retard sur leur exécution entraîne un retard global sur le projet. Un chemin est critique s’il relie Début à Fin et s’il ne contient que des tâches critiques.")
40
Flots dans les réseaux Définition : Un flot dans un graphe G=(X,U) est un vecteur =[1,2,…,m]m tel que La quantité de flot ou flux sur l’arc j j 0, pour tout j =1,…, m Pour tout sommet xX, la 1ère loi de Kirchhoff est vérifiée
![Flots dans les réseaux Définition : Un flot dans un graphe G=(X,U) est un vecteur =[1,2,…,m]m tel que.](http://slideplayer.fr/slide/502682/2/images/40/Flots+dans+les+r%C3%A9seaux+D%C3%A9finition+%3A+Un+flot+dans+un+graphe+G%3D%28X%2CU%29+est+un+vecteur+%EF%81%AA%3D%5B%EF%81%AA1%2C%EF%81%AA2%2C%E2%80%A6%2C%EF%81%AAm%5D%EF%83%8E%EF%83%82m+tel+que..jpg "La quantité de flot ou flux sur l’arc j j 0, pour tout j =1,…, m. Pour tout sommet xX, la 1ère loi de Kirchhoff est vérifiée.")
41
Flots dans les réseaux Flot dans un réseau de transport
On dit que le vecteur =[1,2,…,m] est flot de E à S dans G ssi la loi de Kirshhoff est vérifiée en tout sommet de G sauf pour E et S où on a Donc, si =[1,2,…,m] est un flot dans G alors ’=[0,1,2,…,m] est un flot dans G0 ’=[0,1,2,…,m] est un flot admissible dans G0 ssi pour tout j=0,…,m, b(j)jk(j)
jk(j)")
42
Flots dans les réseaux Flot dans un réseau de transport
On veut acheminer un produit à partir de 3 entrepôts (1,2,3) vers 4 clients (a,b,c,d) Quantités en stock : 45, 25, 25 Demande des clients : 30,10, 20, 30 Limitations en matière de transport d’un entrepôt à un client 1 2 3 a b d c [0,10] [0,15] [0,20] [0,5] S [0,30] [0,10] [0,20] a b c d 1 10 15 - 20 2 5 3 E [0,45] [0,25]
 vers 4 clients (a,b,c,d) Quantités en stock : 45, 25, 25. Demande des clients : 30,10, 20, 30. Limitations en matière de transport d’un entrepôt à un client a. b. d. c. [0,10] [0,15] [0,20] [0,5] S. [0,30] [0,10] [0,20] a. b. c. d E. [0,45] [0,25]")
43
Flots dans les réseaux Exemple de flot
1 2 3 a b d c S [0,10], 10 [0,15], 5 [0,20], 20 [0,20], 15 [0,5], 5 [0,45], 35 [0,25], 25 [0,25], 20 [0,30], 25 [0,30], 30 Valeur du flot = 80 Ce flot est un flot complet, c-à-d, tout chemin de E à S comporte au moins un arc saturé

44
Flots dans les réseaux Quelques problèmes qui se posent
Détermination d’un flot réalisable ou compatible : c’est le cas où il existe des arcs u tels que b(u)>0 Détermination d’un flot maximum Un flot complet n’est pas forcément maximum Un flot maximum est forcément complet Détermination d’un flot maximum de coût minimum
>0. Détermination d’un flot maximum. Un flot complet n’est pas forcément maximum. Un flot maximum est forcément complet. Détermination d’un flot maximum de coût minimum.")
45
Flots dans les réseaux Détermination d’un flot maximum
Principe de l’algorithme de Ford-Fulkerson Construire un flot complet Améliorer itérativement ce flot Examiner tous les chemins de E à S de façon systématique Pour chaque chemin faire passer un flot égal à la capacité résiduelle minimale de ce chemin

46
Flots dans les réseaux Détermination d’un flot maximum
Améliorer itérativement ce flot Graphe d’écart : Soit un flot admissible sur G. Le graphe d’écart Ge()=(X, Üe()) est tel que Pour tout arc jU on associe deux arcs dans Üe() j+ de même sens que j et de capacité résiduelle k+(j)=k(j)- j j- de sens opposé que j et de capacité k-(j)=j-b(j)
=(X, Üe()) est tel que. Pour tout arc jU on associe deux arcs dans Üe() j+ de même sens que j et de capacité résiduelle k+(j)=k(j)- j. j- de sens opposé que j et de capacité k-(j)=j-b(j)")
47
Un flot complet Graphe d’écart 15 10 35 25 5 5 20 30 10 [0,10], 10
b d c S [0,10], 10 [0,15], 5 [0,20], 20 [0,20], 15 [0,5], 5 [0,45], 35 [0,25], 25 [0,25], 20 [0,30], 25 [0,30], 30 Un flot complet E 1 2 3 a b d c S 35 25 20 10 5 15 30 10 5 Graphe d’écart
![Un flot complet Graphe d’écart [0,10], 10](http://slideplayer.fr/slide/502682/2/images/47/Un+flot+complet+Graphe+d%E2%80%99%C3%A9cart+%5B0%2C10%5D%2C+10.jpg "b. d. c. S. [0,10], 10. [0,15], 5. [0,20], 20. [0,20], 15. [0,5], 5. [0,45], 35. [0,25], 25. [0,25], 20. [0,30], 25. [0,30], 30. Un flot complet. E a. b. d. c. S Graphe d’écart.")
48
Flots dans les réseaux Détermination d’un flot maximum
Améliorer itérativement ce flot Théorème : Un flot compatible est maximal ssi il n’existe pas de chemin de E à S dans Ge(). Principe de l’amélioration Chercher un chemin de E à S dans Ge() Soit la plus petite capacité de Pour j+ de , augmenter j de Pour j- de , diminuer j de
. Principe de l’amélioration. Chercher un chemin de E à S dans Ge() Soit la plus petite capacité de Pour j+ de , augmenter j de Pour j- de , diminuer j de ")
49
Flots dans les réseaux Détermination d’un flot maximum
25 5 40 10 20 30 10 a 15 10 5 5 10 1 35 5 b 10 25 5 5 E 2 S 5 15 5 c 10 20 20 3 30 10 d Valeur du flot = 85 Capacité minimale = 5

50
Exemples En 1736, Euler a montré que c’est impossible !! retour

51
retour

53
retour

54
Références bibliographiques
P. Lopez, Cours de graphes, LAAS-CNRS Ph. Vallin and D. Vanderpooten. Aide à la décision : une approche par les cas. Ellipses, Paris, 2000. M. Gondron, M. Minoux, Graphes et algorithmes, Eyrolles, Paris, 1984 C. Prins, Algorithmes de graphes, Eyrolles, Paris, 1994 Ph. Lacomme, C. Prins, M. Sevaux, Algorithmes de graphes, Eyrolles, 2003 B. Baynat, Ph. Chrétienne, …, Exercices et problèmes d’algorithmique, Dunod, 2003 E. Lawler, Combinatorial Optimization – Networks and matroids, Dover Publications, INC, 1976.

Présentations similaires










 graphe (orienté) Calculer H = (S, B) où B est la clôture réflexive et transitive de A. Note : (s,t) B ssi il existe un chemin.>")








