Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez


1
Traitement d'images Hugues BENOIT-CATTIN

2
I. Introduction

3
HBC Traitement d'images Traitement d'images Ce n'est pas ce
qui nous intéresse ! Traitement d'images Traitement d'images HBC

4
Domaines d'application
Vision industrielle Imagerie médicale Imagerie satellite Microscopie Télécommunications Animations, Images de synthèse ....

5
Plan I. Introduction II. Représentations & Acquisition
III. Pré-traitement & Amélioration IV. Compression V. Segmentation VI. Introduction à l'indexation VII. Introduction au tatouage VIII. Conclusion Remerciements à A. Baskurt, C. Odet pour les parties II, III, V

6
Eclairage Formation de l’image Numérisation Corrections
Scène, objets 2D 3D... Formation de l’image Image 2D,3D,... Numérisation Image numérique Corrections - radiométriques - géométriques Restauration Reconstruction Image numérique

7
BDO Tatouage Indexation Compression Segmentation Transmission
Image numérique Indexation Compression Segmentation Transmission Reconnaissance de formes Décision

8
II. Représentation & Acquisition
1. Représentation continue 2. Représentation échantillonnée 3. Voisinage, connexité, distance 4. Acquisition : échantillonnage, quantification, bruit 5. Représentations fréquentielles 6. Représentations pyramidales 7. Représentation de la couleur

9
II.1 Représentation continue
Image = fonction d’au moins deux variables réelles Image : f(x,y) image 2D Volume : f(x,y,z) «image» 3D Séquence d’image : f(x,y,t) Séquence de volumes : f(x,y,z,t) «image» 4D Les valeurs prises par f(.) peuvent être Scalaires (intensité lumineuse) Vectorielles (couleur (RVB, ..), imagerie multispectrale, image de paramètres...) Réelles ou complexes
 image 2D. Volume : f(x,y,z) «image» 3D. Séquence d’image : f(x,y,t) Séquence de volumes : f(x,y,z,t) «image» 4D. Les valeurs prises par f(.) peuvent être. Scalaires (intensité lumineuse) Vectorielles (couleur (RVB, ..), imagerie multispectrale, image de paramètres...) Réelles ou complexes.")
10
Si f(.) représente une intensité lumineuse
Une image 2D f(x,y) scalaire réelle peut être vue comme une surface en 3D : Interprétation altimétrique des images, bassin versant, détection de ligne de crêtes, dénivellation ... Si f(.) représente une intensité lumineuse Cette représentation est utilisée quel que soit le paramètre représenté par f(.) ( Température, pression,....) Correspondance entre niveau de gris et grandeur physique.
 scalaire réelle peut être vue comme une surface en 3D : Interprétation altimétrique des images, bassin versant, détection de ligne de crêtes, dénivellation ... Si f(.) représente une intensité lumineuse. Cette représentation est utilisée. quel que soit le paramètre représenté par f(.) ( Température, pression,....) Correspondance entre niveau de gris et grandeur physique.")
11
Opérations sur les images continues :
Toutes opérations réalisables «sur le papier» sur les fonctions continues à variables réelles Transformée de Fourier bidimensionnelle (2D) Filtrage, convolution, corrélation, intégration, dérivation, traitements non linéaire... On utilisera souvent la notation «continue» pour représenter et manipuler des images numériques (discrètes, échantillonnées, quantifiées) Le traitement numérique de l’image sera parfois une «discrétisation» d’une opération en continu
 Filtrage, convolution, corrélation, intégration, dérivation, traitements non linéaire... On utilisera souvent la notation «continue» pour. représenter et manipuler des images numériques (discrètes, échantillonnées, quantifiées) Le traitement numérique de l’image sera parfois une «discrétisation» d’une opération en continu.")
12
II.2 Représentation échantillonnée
Echantillonnage d’une fonction f(x,y) fe(x,y) = f(x,y).Si Sj d( x - i Dx , y - j Dy ) Dx pas d’échantillonnage dans la direction x Dy pas d’échantillonnage dans la direction y x Dx Dy Si Sj d( x - i Dx , y - j Dy ) Peigne de Dirac 2D
 fe(x,y) = f(x,y).Si Sj d( x - i Dx , y - j Dy ) Dx pas d’échantillonnage dans la direction x. Dy pas d’échantillonnage dans la direction y. x. Dx. Dy. Si Sj d( x - i Dx , y - j Dy ) Peigne de Dirac 2D.")
13
Le poids de chaque Dirac est :
Soit la valeur de f(x,y) en x = i Dx et y = j Dy Soit la valeur «moyenne» de f(x,y) dans une région entourant (i Dx , j Dy) (f(x,y) est pondérée et intégrée dans la région R) Caméra CCD Caméra à tube
 en x = i Dx et y = j Dy. Soit la valeur «moyenne» de f(x,y) dans une région entourant (i Dx , j Dy) (f(x,y) est pondérée et intégrée dans la région R) Caméra CCD. Caméra à tube.")
14
Dans le cas général on aura (cas variant) :
Si h(.,.) est identique en tout point (x,y), on aura (cas invariant) : h représentera la réponse impulsionnelle du système de prise de vue. C’est une opération de convolution, donc de filtrage. L’image échantillonnée est donc : Dans un ordinateur, l’image (numérique) sera représentée par une matrice (tableau 2D) :
 est identique en tout point (x,y), on aura (cas invariant) : h représentera la réponse impulsionnelle du système de prise de vue. C’est une opération de convolution, donc de filtrage. L’image échantillonnée est donc : Dans un ordinateur, l’image (numérique) sera représentée par une matrice (tableau 2D) :")
15
f [i,j] est appelé «valeur du PIXEL (i,j) »
(Pixel: PICture ELement) Pour visualiser une image, on remplit une région rectangulaire (Pixel) avec un niveau de gris (ou de couleur) correspondant à la valeur du pixel. En général les niveaux de gris (ou de couleur) utilisé pour la visualisation sont compris entre 0 et 255 (code de longueur fixe sur 8 bits). f [i,j] Niveau de gris Affichage
![]()
16
La maille (répartition des pixels) est le plus souvent carrée (Dx=Dy) ou rectangulaire
On utilise parfois une maille hexagonale qui possède des propriétés intéressantes pour les notions de voisinage et de distance.
![]()
17
II.3 Voisinage, connexité, distance
Beaucoup de traitements font intervenir la notion de voisinage Un pixel possède plusieurs voisins (4 ou 8) On parlera de connexité 4 ou 8 La région grise forme : UN seul objet en connexité 8 DEUX objets en connexité 4
 On parlera de connexité 4 ou 8. La région grise forme : UN seul objet en connexité 8. DEUX objets en connexité 4.")
18
Distance entre deux pixels f [i,j] et f ’[k,l]
Distance Euclidienne Distance City-Block longueur du chemin en connexité 4 Distance de l’échiquier
![]()
19
II.4 Acquisition : échantillonnage / quantification
Effets de l'échantillonnage : pixelisation 256 x 256 pixels 64 x 64 pixels 16 x 16 pixels Contours en marche d’escalier Perte de netteté Détails moins visibles/ moins précis Perte de résolution

20
Effets de la quantification à l'acquisition
CAN sur les systèmes d’acquisition d’images Codage de la valeur de chaque pixel sur N bits (En général 8 bits) 8 bits (256 niv.) 4 bits (16 niv.) 2 bits (4 niv.) Apparition de faux contours Bruit de quantification Effet visible à l’œil en dessous de 6/7 bits Quantification sur 8 bits pour l’affichage
 8 bits (256 niv.) 4 bits (16 niv.) 2 bits (4 niv.) Apparition de faux contours. Bruit de quantification. Effet visible à l’œil en dessous de 6/7 bits. Quantification sur 8 bits pour l’affichage.")
21
Bruits liés à l'acquisition
Les images sont souvent entachées de bruit, parfois non visible à l’œil, et qui perturberont les traitements Diaphragme F/4 F/8 F/16 Optimiser les conditions d’éclairage Attention à l’éclairage ambiant Mais... diaphragme ouvert = faible profondeur de champ Mais... éclairage important = dégagement de chaleur

22
Eclairage non uniforme !
Correction de l'éclairage

23
Flou de bougé/filé dû à un temps de pose/intégration trop long
Cet effet est limité par l’usage d’obturateur rapide et/ou d’éclairage flash Effet de lignage dû au balayage entrelacé des caméras vidéo Cet effet disparaît avec les caméras à balayage progressif non entrelacé Une bonne acquisition Des traitements facilités

24
II.5 Représentations fréquentielles
Notion de fréquence spatiale Transformée de Fourier Transformée Cosinus

25
Notion de fréquence spatiale

26
x y Variation sinusoïdale rapide (fréquence) des niveaux de gris dans une direction donnée
 des niveaux de gris dans une direction donnée")
27
Transformée de Fourier 2D
Image = S images sinusoïdales (A,f,j) F = image complexe (module & phase) x y fx fy (Module de F(fx , fy)
 F = image complexe (module & phase) x. y. fx. fy. (Module de. F(fx , fy)")
28
Images sinusoïdales Impulsions de Dirac
fx fy Haute fréquence fx fy Basse fréquence

29
Transformée de Fourier Discrète 2D (DFT)
Image échantillonnée (M x N) pixels, la DFT est donnée par : u v
 pixels, la DFT est donnée par : u. v.")
30
Propriétés de la DFT 2D Identiques au 1D
Périodique en u,v (période M,N) F(0,0) = composante continue = moyenne des NG Conservation de l ’énergie SS |f(m,n)|² = SS |F(u,v)|² f réelle F symétrique conjuguée (mod. pair, arg. impair) Séparable Algorithme rapide (FFT) : N².log2 (N) Convolution circulaire = DFT
 F(0,0) = composante continue = moyenne des NG. Conservation de l ’énergie SS |f(m,n)|² = SS |F(u,v)|². f réelle F symétrique conjuguée (mod. pair, arg. impair) Séparable. Algorithme rapide (FFT) : N².log2 (N) Convolution circulaire = DFT.")
31
Importance de la phase DFT - DFT-1 Module Phase Module

32
Echantillonnage & Aliasing
Si le théorème de Shannon n’est pas respecté lors de l’échantillonnage d’une image continue, il y a repliement de spectre Ceci se traduit dans les images par des figures de Moiré, c’est à dire des formes fausses qui n’existaient pas dans l’image d’origine Les caméras matricielles types CCD induisent systématiquement du repliement de spectre. L’image d’entrée ne devra donc pas contenir trop de hautes fréquences ( Ne passez pas à la télé avec un costume rayé ! )
")
33
Continue ! Echantillonnée Sans repliement Remarque DFT périodique

34
Continue ! Echantillonnée Avec repliement

35
Transformée Cosinus Discrète

36
Propriétés de la DCT 2D Linéaire, séparable Coefficients réels
C(0,0) = composante continue = moyenne des NG Concentration d ’énergie en basse-fréquence Algorithme rapide (via la FFT) : N².log2 (N) compression d ’images
 = composante continue = moyenne des NG. Concentration d ’énergie en basse-fréquence. Algorithme rapide (via la FFT) : N².log2 (N) compression d ’images.")
37
II.6 Représentations pyramidales
Pyramides Gaussiennes & Laplaciennes Sous-Bandes / Transformée en ondelettes Traitement multirésolution : Coarse To Fine

38
Pyramides Gaussiennes & Laplaciennes

39
Burt & Adelsson (1983) Filtrage passe-bas 2D de type gaussien Compression d ’images Analyse et segmentation d ’images

40
Décomposition en sous-bandes / ondelettes
Esteban/Galland Woods/O ’Neil … - Mallat (1989) Filtres FIR 1D, 2D Filtres IIR 1D, 2D Une Décomposition
 Filtres FIR 1D, 2D. Filtres IIR 1D, 2D. Une Décomposition.")
41
Une reconstruction Décomposition / Reconstruction sans pertes cascades

42
Pyramidale (itérée en octave) Adaptative
 Adaptative")
43
Réversible Concentration d ’énergie Spatio - fréquentiel Analyse & Compression

44
II.7 Représentation de la couleur
RGB CMY YUV / YIQ HSL Palettes

45
Rouge Vert Bleu (RGB) Synthèse additive de la couleur (perception d ’une source) Œil, Moniteur, Carte graphique … Images 24 bits (3*8 bits) 16 M de couleurs >> NG : R=G=B
 16 M de couleurs >> NG : R=G=B.")
46
Cyan Magenta Jaune (CMY)
Synthèse soustractive de la couleur Objet éclairé absorbant un certain nombre de fréquences Extension CMYK pour l ’impression en quadrichromie

47
YUV (PAL) / YIQ (NTSC) Y = intensité lumineuse = TV N&B
UV / IQ = information chrominance YUV >> RGB pour la décorrélation de l ’information Compression d ’images couleur DVB YUV 4:2:0

48
Hue Saturation Lightness (HSL)
Le cerveau réagit à : la longueur d ’onde dominante (teinte) la contribution à la luminosité de l ’ensemble (saturation) l ’intensité par unité de surface = luminance Y = L UV coordonnées polaire HS
 la contribution à la luminosité de l ’ensemble (saturation) l ’intensité par unité de surface = luminance. Y = L. UV coordonnées polaire HS.")
49
Palettes de couleur 16 Millions de couleurs 256 couleurs = palettes (GIF, BMP) Image indexée = Palette (couleur sur 24 bits) + matrice d ’index visualisation en fausses couleurs

50
Plan I. Introduction II. Représentations & Acquisition
III. Pré-traitement & Amélioration IV. Compression V. Segmentation VI. Introduction à l'indexation VII. Introduction au tatouage VIII. Conclusion

51
III. Pré-traitements & Amélioration
1. Opérations pixel à pixel 2. Opérations sur un voisinage : filtrage 3. Transformations géométriques

52
Pourquoi pré-traiter une image ?
Pour corriger les effets de la chaîne d ’acquisition Correction radiométriques et/ou géométriques Réduire le bruit : Restauration, Déconvolution Améliorer la visualisation Améliorer les traitements ultérieurs (segmentation, compression …)
")
53
III.1 Opérations pixel à pixel
Modification d'un pixel indépendamment de ses voisins Histogramme des niveaux de gris Comptage des pixels ayant un niveau de gris (NG) donné Histogramme densité de probabilité des niveaux de gris Niveau de gris
![]()
54
Modification d ’histogramme
Transformation des niveaux de gris : f v=f(u) avec u niv. gris de départ, v niv.gris d'arrivée f peut prendre une forme quelconque v 255 u u v 255
 avec u niv. gris de départ, v niv.gris d arrivée. f peut prendre une forme quelconque. v u. u. v")
55
Recadrage linéaire des niveaux de gris v
255 v=f(u) u 255
 u")
56
Seuillage binaire Négatif

57
Egalisation d'histogramme

58
Autres transformations
Non-linéaire, Logarithme, Extraction de plans binaires, Ecrêtage, Compression-dilatation de dynamique, Spécification d’histogramme, Codage en couleur, Pseudo-couleur, .... Segmentation basée sur les niveaux de gris (multi-seuillage)
")
59
III.2 Opérations sur un voisinage : filtrage
Modification d'un pixel en fonction des ses voisins Filtrage linéaire Domaine spatial : filtres FIR 2D (masque), filtres IIR Domaine fréquentiel dans le plan de Fourier Image f(x,y) Filtre h(x,y) Image filtrée g(x,y) g(x,y) = h(x,y)*f(x,y) (convolution bidimensionnelle) G(u,v) = H(u,v) . F(u,v) Filtrage non-linéaire dans le domaine spatial
, filtres IIR. Domaine fréquentiel dans le plan de Fourier. Image f(x,y) Filtre. h(x,y) Image filtrée. g(x,y) g(x,y) = h(x,y)*f(x,y) (convolution bidimensionnelle) G(u,v) = H(u,v) . F(u,v) Filtrage non-linéaire dans le domaine spatial.")
60
Filtrage spatial FIR 2D : masque de convolution
Convolution par une réponse impulsionnelle finie appelée Masque de Convolution f est l’image de départ h est le masque de convolution W défini un voisinage Un pixel f(i,j) est remplacé par une somme pondérée de lui- même et des pixels de son voisinage
 est remplacé par une somme pondérée de lui- même et des pixels de son voisinage.")
61
Exemple : Filtre moyenneur
1 k W: voisinage 2x2 k=0,1 l=0,1 1/4 1/4 1 h(k,l) = 1 /4 pout tout (k,l) 1/4 1/4 l ( En ne conservant que la valeur entière ) 3/4 6/4 7/4 x 5/4 5/4 3/4 x x x x x x x x x x x
 = 1 /4 pout tout (k,l) 1/4. 1/4. l. ( En ne conservant. que la valeur entière ) /4 6/4 7/4 x. 5/4 5/4 3/4 x. x x x x x x. x x x x.")
62
Moyenneur 2x2 (zoom)
")
63
Remarques Utilisation de voisinages très divers : Rectangulaires 2x2, 3x3, 4x4, 5x5, 7x7, 1x2, 2x1, 1x3, 3x1... En croix, «Circulaires»... Valeurs des coefficients: Constants(Moyenneur), Gaussiens… Effets de filtrage passe-bas : image plus «flou»:, contours moins précis mais réduction du bruit haute fréquence Le principe du masque de convolution sera utilisé pour d’autres traitements (Détection de contours) L’utilisation d’un voisinage entourant un pixel est un principe très général en traitement de l’image
, Gaussiens… Effets de filtrage passe-bas : image plus «flou»:, contours moins précis mais réduction du bruit haute fréquence. Le principe du masque de convolution sera utilisé pour d’autres. traitements (Détection de contours) L’utilisation d’un voisinage entourant un pixel est un principe très général en traitement de l’image.")
64
Exemple : réduction du bruit
Filtre moyenneur 3x3 (k=-1,0,1 l=-1,0,1), Valeur constante h(k,l)=1/9
, Valeur constante h(k,l)=1/9.")
65
Exemple : réhaussement de contours
= Image d’origine + Laplacien

66
Filtres FIR 2D et plan de Fourier
g(x,y) = h(x,y)*f(x,y) G(u,v) = H(u,v) . F(u,v) Filtrage : N².(L-1) + N² vs. N².Log2N + N² Synthèse de filtres 1D 2D Echantillonnage en fréquence Fenêtre
 = h(x,y)*f(x,y) G(u,v) = H(u,v) . F(u,v) Filtrage : N².(L-1) + N² vs. N².Log2N + N². Synthèse de filtres. 1D 2D. Echantillonnage en fréquence. Fenêtre.")
67
C’est un filtre passe-bas, peu sélectif, anisotrope
Filtre Moyenneur Masque 3x3 h(k,l) u v H(u,v) TFD 2D C’est un filtre passe-bas, peu sélectif, anisotrope
 u. v. H(u,v) TFD 2D. C’est un filtre passe-bas, peu sélectif, anisotrope.")
68
- Filtre IIR version tronquée à Ks et échantillonnée masque FIR
Filtre Gaussien - Filtre IIR version tronquée à Ks et échantillonnée masque FIR h(k,l) H(u,v) TFD 2D - C’est un filtre passe-bas isotrope peu sélectif. - H(u,v) est aussi une gaussienne
 H(u,v) TFD 2D. - C’est un filtre passe-bas isotrope peu sélectif. - H(u,v) est aussi une gaussienne.")
69
Fenêtrage fréquentiel
DFT Filtrage DFT-1

70
Illustrations

71
Filtrage non linéaire 2D : filtre Médian
Remplacer le pixel central par la valeur médiane du voisinage

72
Avantage par rapport au filtrage linéaire
les bords sont conservés Filtre linéaire de largeur 3 Filtre médian voisinage 3

73
Principe du filtrage IIR 2D
Notion de causalité 2D Pixels du passé Pixels du futur Pixel du présent Exemple: balayage colonne puis ligne Filtrage récursif Remarques Le choix du balayage est arbitraire Le pixel présent ne dépend que des pixels du passé Voisinage = pixels du passé entourant le pixel présent

74
III.3 Transformations géométriques
Objectif Corriger les déformations dues au système de prise de vue f(x,y) = f’(x’,y’) avec x’=h1(x,y) et y’=h2(x,y) Exemple : transformation affine (translation, rotation) Remarque : les paramètres a,b,c,d peuvent ne pas être les mêmes pour toutes les régions d’une image
 = f’(x’,y’) avec x’=h1(x,y) et y’=h2(x,y) Exemple : transformation affine (translation, rotation) Remarque : les paramètres a,b,c,d peuvent ne pas être les mêmes pour toutes. les régions d’une image.")
75
x,y,sont des valeurs discrètes (image échantillonnée) x=kDx , y=lDy
Problème x,y,sont des valeurs discrètes (image échantillonnée) x=kDx , y=lDy et x’=h1(kDx , lDy) et y’=h2(kDx , lDy) ne seront pas nécessairement des multiples entiers de Dx et Dy k k+1 m m+1 Dx Dx l n P1 Dy P2 Dy l+1 n+1 P3 P4
 x=kDx , y=lDy. et x’=h1(kDx , lDy) et y’=h2(kDx , lDy) ne seront pas. nécessairement des multiples entiers de Dx et Dy. k. k+1. m. m+1. Dx. Dx. l. n. P1. Dy. P2. Dy. l+1. n+1. P3. P4.")
76
Solution: Interpolation
m f’(Q)=f’(mDx,nDy) = G[f(P1),f(P2),f(P3),f(P4)] avec f(P1)=f (kDx, lDy) f(P2)=f ((k+1)Dx,lDy) f(P3)=f ((k+1)Dx,(l+1)Dy) f(P4)=f (kDx, (l+1)Dy) P1 P2 Q n d4 P3 P4 Plus proche voisin: f(Q)=f(Pk) , k : dk=min{d1,d2,d3,d4} Interpolation linéaire Interpolation bilinéaire, fonctions spline, Moindre ², ....
=f’(mDx,nDy) = G[f(P1),f(P2),f(P3),f(P4)] avec f(P1)=f (kDx, lDy) f(P2)=f ((k+1)Dx,lDy) f(P3)=f ((k+1)Dx,(l+1)Dy) f(P4)=f (kDx, (l+1)Dy) P1. P2. Q. n. d4. P3. P4. Plus proche voisin: f(Q)=f(Pk) , k : dk=min{d1,d2,d3,d4} Interpolation linéaire. Interpolation bilinéaire, fonctions spline, Moindre ², ....")
77
Warping Placage de texture animation ...
y y’ x’= x+0.5 y y’= y x x’ 128x128 Warping Placage de texture animation ...

78
Plan I. Introduction II. Représentations & Acquisition
III. Pré-traitement & Amélioration IV. Compression V. Segmentation VI. Introduction à l'indexation VII. Introduction au tatouage VIII. Conclusion

79
IV. Compression 1. Introduction 2. Approches directes
3. Approches par transformation 4. Compression de séquences d'images

80
IV.1 Introduction Objectifs Historique
Réduction du volume occupé par les images numériques pour faciliter leur transfert et/ou leur stockage Historique 1952 : Codeur entropique (Huffman) 1978 : DCT (Pratt) 1980 : Vectoriel (Linde-Buzo-Gray) 1986 : Sous-bandes (Woods) 1986 : Vectoriel sur treillis (Fisher) 1989 : JPEG 1989 : MPEG-2 1989 : Ondelettes (Mallat, Daubechies) 1990 : Fractales (Jacquin) 1996 : SPIHT 1996 : MPEG-4 1997 : MPEG-7 1998 : JPEG2000
 1978 : DCT (Pratt) 1980 : Vectoriel (Linde-Buzo-Gray) 1986 : Sous-bandes (Woods) 1986 : Vectoriel sur treillis (Fisher) 1989 : JPEG : MPEG : Ondelettes (Mallat, Daubechies) 1990 : Fractales (Jacquin) 1996 : SPIHT : MPEG : MPEG : JPEG2000.")
81
Applications Imagerie médicale Télémédecine Imagerie spatiale
Imagerie sous-marine Archivage divers (Musée, BNF, Empreintes ...) Vidéo conférence / visiophone (64 kb/s) Télésurveillance Video On Demand Télévision numérique (150 Mb/s) ...
 Vidéo conférence / visiophone (64 kb/s) Télésurveillance. Video On Demand. Télévision numérique (150 Mb/s) ...")
82
Classification des méthodes de compression
image Quantification Codage Transformation bits Sans pertes / avec pertes contrôlées Sans pertes (Huffman, Quadtree) image originale = image comprimée TC limité (#3) Avec pertes contrôlées On perd l'information qui se voit peu TC augmente Recherche d'un compromis Tc / Qualité Directe / Transformation Directe Quantification & codage des pixels de l'image Transformation Quantification & codage des coeff. transformés
 image originale = image comprimée TC limité (#3) Avec pertes contrôlées. On perd l information qui se voit peu TC augmente. Recherche d un compromis Tc / Qualité. Directe / Transformation. Directe Quantification & codage des pixels de l image. Transformation Quantification & codage des coeff. transformés.")
83
Evaluation d'une méthode compression
Dépend de l'application Taux de compression (Tc) Ex : image (512x512x8bpp) avec Tc=10 512x512x8/10=26215 bits 0.8 bpp Qualité Critère mathématique (RSB) Avec Critères subjectifs - Courbes ROC (médecine) - Notations subjectives (TV)
 Ex : image (512x512x8bpp) avec Tc=10. 512x512x8/10=26215 bits 0.8 bpp. Qualité. Critère mathématique (RSB) Avec. Critères subjectifs. - Courbes ROC (médecine) - Notations subjectives (TV)")
84
Vitesse d'exécution : codeur /décodeur Complexité
Autres critères Vitesse d'exécution : codeur /décodeur Complexité - Additions / multiplications - Soft / Hard Résistance au bruit de transmission Intégration de post-traitements - Prise en compte du récepteur (homme / machine) Coût financier Scalability
 Coût financier. Scalability.")
85
Codage par longueur de plage Codage type dictionnaire
IV.2 Approches directes Codage Huffman Codage arithmétique Codage par longueur de plage Codage type dictionnaire Quantification scalaire Quantification vectorielle Méthodes prédictives Approche quadtree Codage fractale Codeurs de source (Th. Information)
")
86
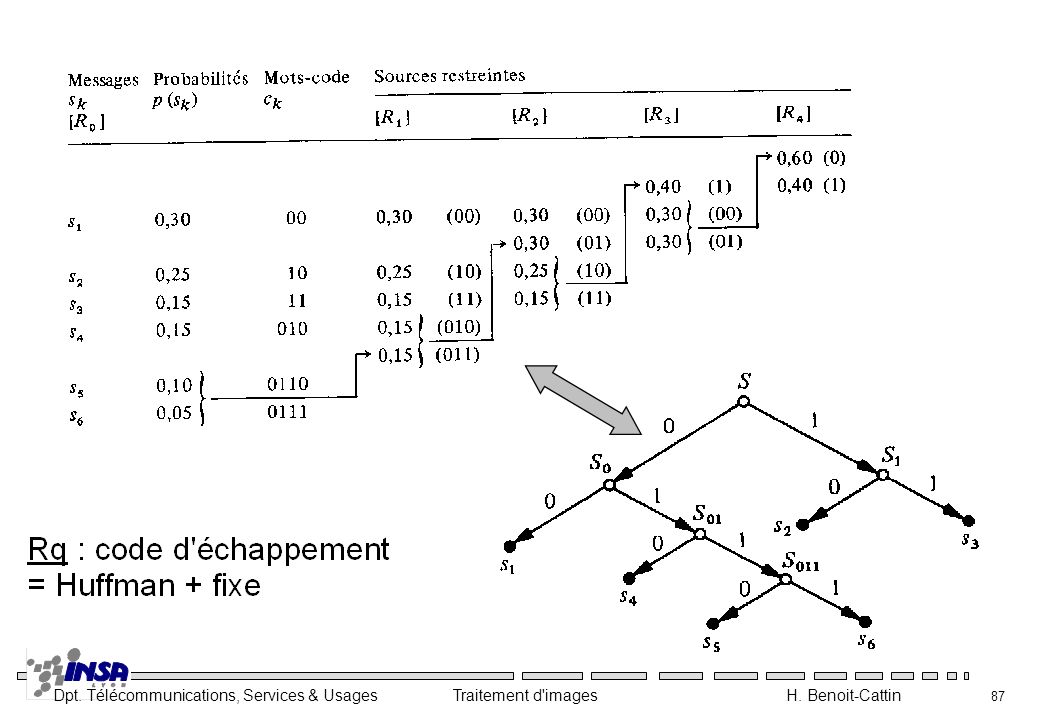
Codage Huffman (1952) Algorithme
 Algorithme")
88
Codage Arithmétique (1976)
JBIG Codage des Fax type IV

89
Exemple

91
Codage par longueur de plage (Run length coding)
CCITT, Fax groupe III JPEG

92
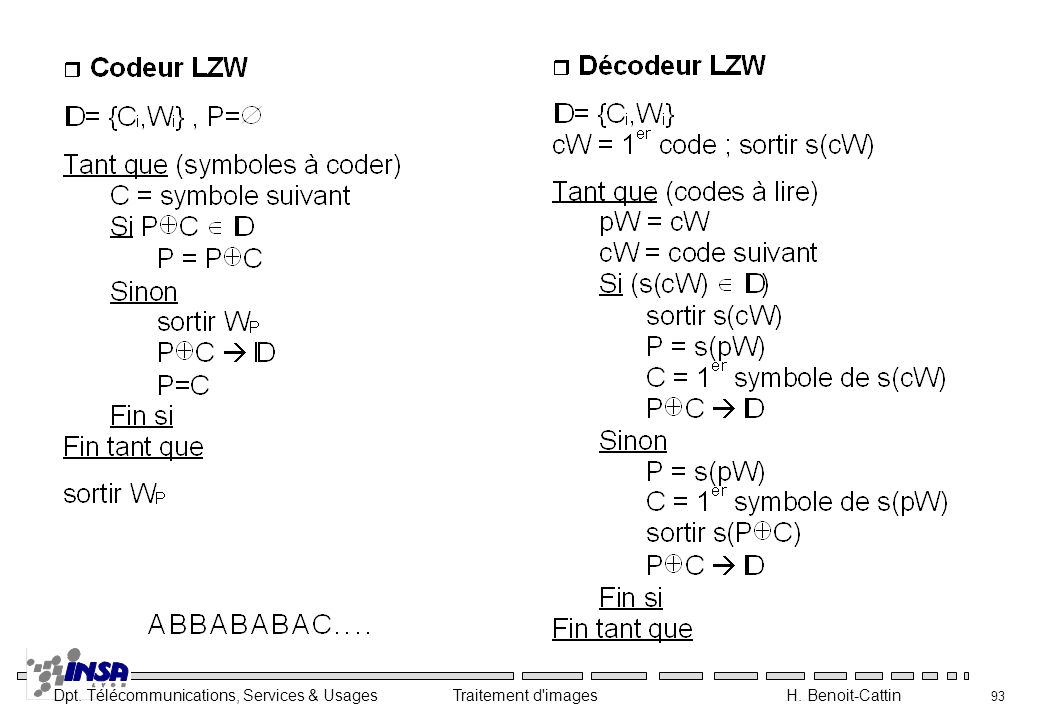
Codage de type dictionnaire (1977)
")
94
Quantification scalaire
Traitement pixel à pixel Diminuer le nombre de niveaux de gris utilisés : Nnq < Nnp Problèmes - Comment choisir les seuils de quantification (si) ? - Comment choisir les niveaux de quantification (qi) ?
 - Comment choisir les niveaux de quantification (qi)")
95
Quantification scalaire uniforme linéaire
Seuils répartis de façon uniforme Niveaux = milieux des seuils C'est un quantificateur linéaire avec

96
Quantification scalaire uniforme optimale
Seuils répartis de façon uniforme Niveaux = Barycentre (histogramme) Quantification optimale (Loyd-Max : 1960) Minimise l'erreur de quantification Algorithme itératif très long pour des distributions inconnues Tables pour des dist. gaussiennes, laplaciennes, ... Fait le travail du codeur !
 Quantification optimale (Loyd-Max : 1960) Minimise l erreur de quantification. Algorithme itératif très long pour des distributions inconnues. Tables pour des dist. gaussiennes, laplaciennes, ... Fait le travail du codeur !")
97
Exemple de comparaison (peppers : 512x512x8bpp)
Remarque Efficacité variable du codeur entropique !

98
Image originale Q. uni. lin. : RSB 22,5 dB Q. uni. opt. : RSB 23,8 dB Q. Max : RSB 24,2 dB

99
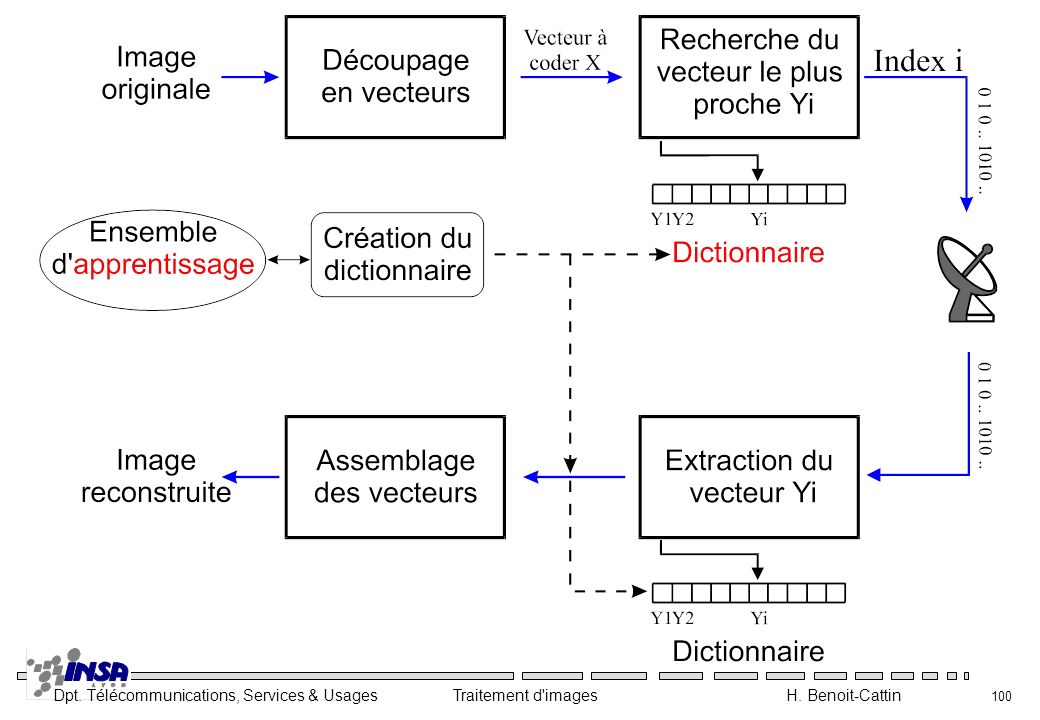
Quantification vectorielle
Extension de la quantification scalaire Pixel Vecteur = bloc de pixels contigus Vecteur de taille et forme variable Approche optimale : Linde Buzo Gray (1980) Phase d'apprentissage : dictionnaire de vecteurs Vecteur = représentant d'une région de Voronoï de taille variable Dictionnaire connu du codeur /décodeur Phase d'apprentissage délicate Temps de recherche dans le dictionnaire Approche treillis
 Phase d apprentissage : dictionnaire de vecteurs. Vecteur = représentant d une région de Voronoï de taille variable. Dictionnaire connu du codeur /décodeur. Phase d apprentissage délicate. Temps de recherche dans le dictionnaire. Approche treillis.")
101
Modulation par Impulsions Codées Différentielles (MICD)
Méthodes prédictives (1974) Exploitent la corrélation entre pixel voisin Modulation par Impulsions Codées Différentielles (MICD) DPCM Propagation des erreurs Prédicteurs non optimaux Adaptation aux statistiques locales
 Exploitent la corrélation entre pixel voisin. Modulation par Impulsions Codées Différentielles (MICD) DPCM. Propagation des erreurs. Prédicteurs non optimaux. Adaptation aux statistiques locales.")
102
IV.3 Approches par transformation

103
Représentation différente de l'image
Décorrélation Gain en performances Temps de calcul supplémentaire Une Transformation Réversible (sans perte) Orthogonale (énergie conservée) Rapide DCT JPEG Ondelettes SPIHT, JPEG2000
 Orthogonale (énergie conservée) Rapide. DCT JPEG. Ondelettes SPIHT, JPEG2000.")
104
Compression DCT bloc : JPEG (1989)
DCT bloc 8x8 homogénéité locale de l'image l'erreur de quantification est localisée au bloc

105
Schéma général

106
Matrice de normalisation
allocation des bits aux coeffs avant quantification par arrondi Matrice chrominance Matrice luminance

107
Lecture zig-zag prise en compte de la répartition spatiale de l'énergie pour faire apparaître de longues plages de coeffs nuls Codage du coeff DC DPCM d'ordre 1 + Huffman

108
Codage des coeffs AC Codage hybride : runlength Huffman - Huffman = Code (plage de 0 + catégorie) 162 codes : 10catx16lp+2(EOB+16)
")
109
Exemple / 00 0 / / 1010 Extrait de la table d'Huffman des AC

110
JPEG = méthode générale à adapter ...
Remarques JPEG = méthode générale à adapter ... Très performant à taux faibles (#10) Effets de blocs à taux élevés Tc = 10 / RSB = 30.1 dB Tc = 20 / RSB = 28.7 dB
 Effets de blocs à taux élevés. Tc = 10 / RSB = 30.1 dB. Tc = 20 / RSB = 28.7 dB.")
111
IV.4 Compression de séquences d'images
Supprimer la redondance spatiale ou intra-image approches 2D Supprimer la redondance temporelle ou inter-image utiliser le déjà vu et le mouvement

112
Les normes MPEG

113
Les bases de H261 à MPEG2 3 types d'images : 3 codages

114
Images I (intra) - Codées JPEG' - Point d'accès séquence (0.5s) - Tc faible Images P (Prédites) - Prédites à partir de I ou P - Codage DPCM des vecteurs mvt - Codage JPEG* de l'erreur de prédiction - Tc élevé - Propagation de l'erreur Images B (Bidirectionnelles) - Interpolées à partir des I P - Tc le plus élevé
 - Interpolées à partir des I P. - Tc le plus élevé.")
115
2 paramètres de réglage - N : distance inter-I (#12) - M : distance inter-P (#3) GOP
 - M : distance inter-P (#3) GOP")
116
Estimation du mouvement par block matching
- Blocs 16x16 - Compromis simplicité / efficacité - Rapide : algorithme logarithmique

117
Le codage des images P 1- Calcul des Vj entre 2- Synthèse de Ip(n) : 3- Calcul de l'erreur : E(n) = Ip(n) - I(n) 4- Codage JPEG* de E(n) 4bis- Mémorisation de 5- Codage DPCM des Vj
 4bis- Mémorisation de. 5- Codage DPCM des Vj.")
118
Codeur MPEG2

119
Décodeur MPEG2

120
Codage et TVnum Numérisation brute : 200 Mb/s DVB # DVD = MPEG2 MP@ML
- 720 x 480/576 (30/25 Hz) avec IPB - 4 Mb/s (PAL/SECAM) à 9 Mb/s (studio) - Tc de 40 à 18
 avec IPB. - 4 Mb/s (PAL/SECAM) à 9 Mb/s (studio) - Tc de 40 à 18.")
121
V. Introduction à la segmentation

122
Pas de norme ! Pas de méthode unique ! Pas de recette !

123
VI. Introduction à l ’indexation
Texte écrit recherche d'info. sur le contenu (symbolique du mot) Images Contenu d'une image texte ! Indexation manuelle dans des bases de données Augmentation exponentielle du nombre d'images Un défi Automatisation de l'indexation d'images par le contenu Interfaces et moteurs de recherche adaptés Rque : Analyse d'une image = quelques sec.
 Images. Contenu d une image texte ! Indexation manuelle dans des bases de données. Augmentation exponentielle du nombre d images. Un défi. Automatisation de l indexation d images par le contenu. Interfaces et moteurs de recherche adaptés. Rque : Analyse d une image = quelques sec.")
124
Retrouver des images semblables à celles que cherche l'utilisateur
Problème posé Retrouver des images semblables à celles que cherche l'utilisateur Que cherche l'utilisateur ? exemples, mots clés Quelles mesures considérer sur les images ? Quelles fonctions de ressemblance ? Contraintes de robustesse rotation échelle éclairage

125
VII. Introduction au tatouage
Objectif Protéger la propriété des images numériques Watermark = signal inséré dans l'image Unique identifie l'image Multiple identifie la source 2 types visible facile à enlever, propriétaire visible invisible difficile à enlever, piéger les truands

126
Remarques Original + watermark # original watermark signature électronique Contraintes ! Impossible à enlever sans dégrader l'image Résiste au scaling, cropping, coding, modif histogramme Invisible mais extractible En nombre suffisants

127
Domaine spatial (peu résistant)
Quelles approches Domaine spatial (peu résistant) flip des bits de poids faible de quelques pixels Modifications d'amplitude (YUV) Domaine fréquentiel Modifications de coefs TFD / TCD / Sous-bandes Compromis entre (invisibilité / indélébilité)
 flip des bits de poids faible de quelques pixels. Modifications d amplitude (YUV) Domaine fréquentiel. Modifications de coefs TFD / TCD / Sous-bandes. Compromis entre (invisibilité / indélébilité)")
128
VIII. Conclusion BDO Tatouage Indexation Compression Segmentation
Image numérique Indexation Compression Segmentation Image Multimédia Des techniques complexes et prometteuses Dimension affective forte Au cœur de nouveaux services & usages Transmission Rec. formes Décision

Présentations similaires



















>")
>")