Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Gradient-Based 2D/3D Rigid Registration of Fluoroscopic X-ray to CT Harel Livyatan Ziv Yaniv Leo Joskowicz Boukhriss Isameddine DEA DISIC 2004

2
Plan Buts et spécifications Classification des techniques Problématique Protocoles de recalage Algorithme Paramétrage Expériences et résultats Conclusion

3
Buts et spécifications Développer une méthode de recalage entre les images X et les images CT Exactitude : un taux derreur en moyenne entre 1 et 1.5 mm et entre 2 et 3 mm au pire des cas Robustesse : réussite au premier test avec un taux de réussite=95% Vitesse : le recalage doit prendre au max 1 mn Interactivité : simple et minime pendant les phases interopératives et préopératoires

4
Problématique Il sagit de trouver la transformation rigide qui relie le model préopératoire de CT et les images X (prises juste avant lopération) Cette transformation peut être trouvée par un trackeur de position et un système interopératoire de raffinement des prises des images X
 Cette transformation peut être trouvée par un trackeur de position et un système interopératoire de raffinement des prises des images X")
5
Classification des techniques Algorithmes à base géométrique Algorithmes à base dintensité GRADIENT-BASED Point/ Point Point/ Surface Contour/ Surface Surface/ Surface ROIs/ ROIs Image/ Image Less Data More Data 12 3 4 5 6 GEOMETRY-BASED INTENSITY-BASED La méthode

6
Vue globale du système

7
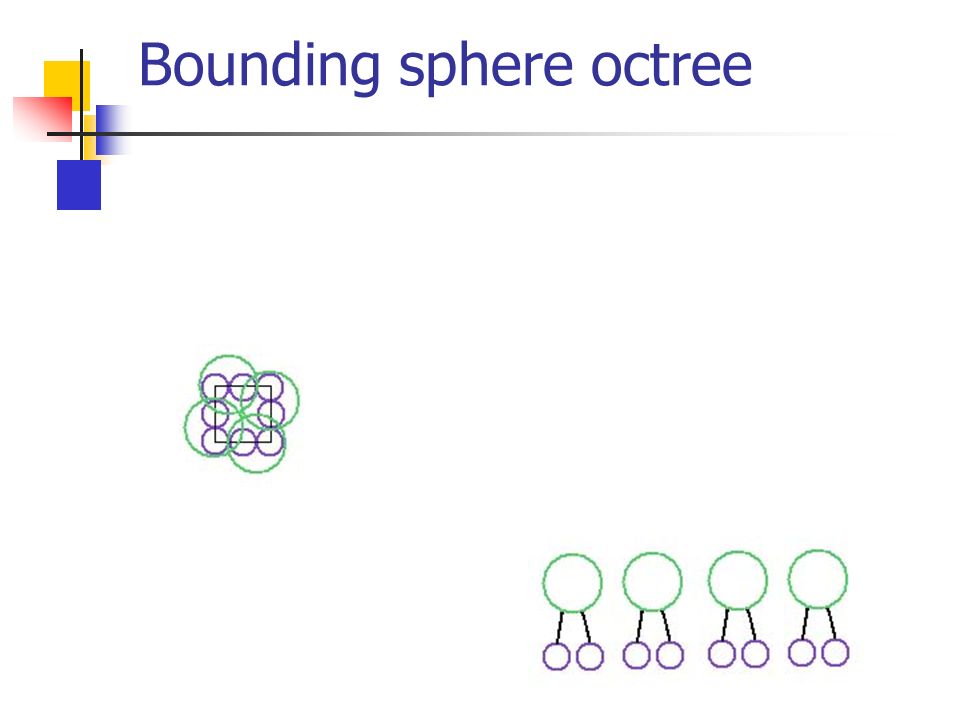
Protocoles de recalage On obtient off-line 3 structures de données des images CT : 1. Un maillage surfacique de lorgane 2. Un octree de sphère englobbante appliqué à ce maillage 3. Gradient du modèle 3D On prend 2-5 images X Calcul de

8
Bounding sphere octree

11
Smallest bounding sphere 8 fils pour chaque nœud

12
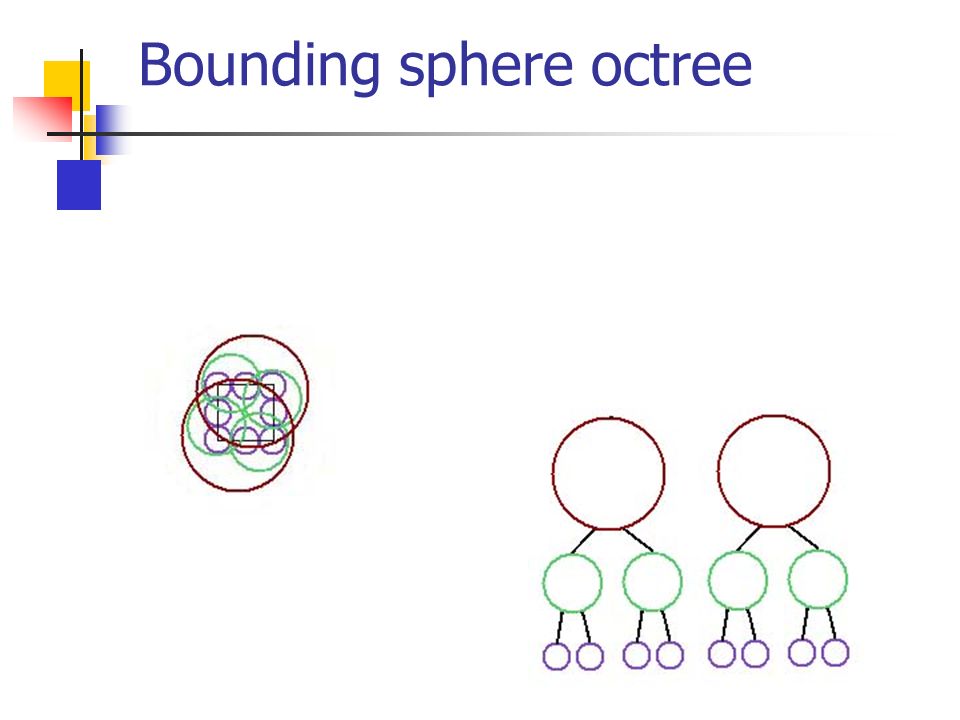
Bounding sphere octree Successive smallest bounding sphere approximation of a proximal femur surface mesh

13
Algorithme Lalgorithme se divise en 3 étapes. Les deux premières étapes sont basées sur des travaux précédents : Estimation de la position initiale Recalage grossier sur les contours de lorgane Recalage par projection du gradient sur les pixels de contour

14
Estimation de la position initiale Elle peut se faire par différents moyens: Précisions cliniques Points marqueurs (chirurgien) Marquer des points sur la surface des données CT et les tracker sur les images X par un suiveur de point ! Quelle que soit la méthode : lestimation est entre 10 et 20 mm et entre 5 à 15° par rapport à la position finale

15
Recalage sur les contours de lorgane Cette opération réduit la distance entre le maillage surfacique sphérique de lorgane et léchantillon des points de contour des images X Le contour de lorgane des images X est extrait avec lalgorithme de segmentation live-wire Cette opération de recalage est réalisée grâce à lalgorithme ICP : iterative closest point

16
Algorithme de segmentation live-wire Choix dun chemin dans un graphe parmi tous les graphes associés à tous les pixels (Dijkstra)
")
17
Iterative Closest Point Soit p un ensemble de points et X une surface de référence 1.K=0 et P (0) =P 2.Calcul de lensemble Y (k), « projection » de P (k) sur X 3.Calcul de q (k) =[q R |q T ] T qui met en correspondance P avec Y (k) 4.Calcul de P (k+1) = q (k) (P) 5.Arrêt si la convergence est satisfaisante sinon incrémenter K et revenir à létape 2
![Iterative Closest Point Soit p un ensemble de points et X une surface de référence 1.K=0 et P (0) =P 2.Calcul de lensemble Y (k), « projection » de P (k) sur X 3.Calcul de q (k) =[q R |q T ] T qui met en correspondance P avec Y (k) 4.Calcul de P (k+1) = q (k) (P) 5.Arrêt si la convergence est satisfaisante sinon incrémenter K et revenir à létape 2](http://images.slideplayer.fr/2/505391/slides/slide_17.jpg "Iterative Closest Point Soit p un ensemble de points et X une surface de référence 1.K=0 et P (0) =P 2.Calcul de lensemble Y (k), « projection » de P (k) sur X 3.Calcul de q (k) =[q R |q T ] T qui met en correspondance P avec Y (k) 4.Calcul de P (k+1) = q (k) (P) 5.Arrêt si la convergence est satisfaisante sinon incrémenter K et revenir à létape 2")
18
Iterative Closest Point Exemple dexécution de lalgorithme ICP

19
Projection du gradient Quand les images CT sont alignées avec lanatomie réelle, les rayons X passent à travers les pixels du contour sont tangents à la surface de lorgane Ces rayons passent par des maxima locaux du module du gradient volumique

20
Optimisation Soit T une matrice de transformation 6D E

21
Analyse Calculer le gradient en volume des images CT en sur - échantillonnant dans une résolution de 0.5 mm 3 Extraire les pixels du contour de chaque image X et construire lensemble des rayons qui passent à travers ces pixels(Canny) Appliquer après la méthode du Downhill simplex sur la fonction E ! Le calcul est fait en échantillonnant chaque rayon dans des intervalles de 1mm.

22
Paramétrage CategoryParameter Description Default value 1. 3D modelMarching Cubes iso-value1200 Sphere Tree maximal depth7 2. Livewire# of points input by user6-10 200 # of contour points per image 3. ICPMax # of iterations1000 4. Fluoro X-ray images Gaussian mask(, ) (0,1) Lower thresholdLower 5% of grad. mag. Upper thresholdUpper 10% of grad. mag. Min contour length30 pixels # of images3-5 5. CT volume Gaussian mask(, ) (0,1/1024) Ray sampling interval1mm 6. Downhill simplex optimisationContraction0.5 Expansion2 Reflection1 Max. # of iterations5000 Intenal Simplex delta threshold10 -3 External Simplex delta threshold10 -3
 (0,1) Lower thresholdLower 5% of grad. mag. Upper thresholdUpper 10% of grad. mag. Min contour length30 pixels # of images CT volume Gaussian mask(, ) (0,1/1024) Ray sampling interval1mm 6. Downhill simplex optimisationContraction0.5 Expansion2 Reflection1 Max. # of iterations5000 Intenal Simplex delta threshold10 -3 External Simplex delta threshold")
23
Expériences Les expériences ont été réalisées dans plusieurs situations : Simulation avec des données cliniques Ct et des images simulées X Des expériences in-vitro avec des organes secs Des expériences sur des cadavres Sur les organes suivants : fémur humain, vertèbre, bassin et hanche dagneau Le calcul sest fait sur un PC windows XP 2.4 GHZ avec 1GB de RAM.

24
Résultats Model CT Position initiale et finale de recalage

25
Data setStepFinal sTRE ΔxΔy Δz Δ x Δ yΔ z (mm) (degree) Time (secs) Simulation 1. real pelvis Initial Coarse fine 9.5 1.7 0.5 5.3 3.5 4.8 0.8 1.2 1.3 2.7 1.3 2.4 0.6 0.7 0.6 0.2 0.3 0.2 0.1 0.1 0.2 5.3 139.9 In-vitro 2. dry vertebra 3. dry femur Initial Coarse Fine Initial Coarse Fine 9.6 3.6 0.5 9.8 2.3 1.3 3.7 6.4 4.5 3.1 3.9 3.1 3.5 3.7 3.5 3.5 3.5 1.9 0.5 0.1 0.4 0.2 0.1 0.2 3.9 4.6 4.8 6.6 4.2 4.6 1.6 1.3 1.4 3.1 1.0 3.2 0.3 0.7 0.9 1.2 0.6 1.4 4.6 268.9 3.8 58.3 Cadaver 4. lamb hip 5. human pelvis Initial Coarse Fine Initial Coarse Fine 9.8 2.1 1.4 9.8 6.5 1.7 5.0 5.6 5.0 1.9 0.9 1.7 4.1 1.5 4.1 4.1 4.1 8.0 4.8 1.3 1.9 4.4 0.5 3.7 4.4 5.0 6.5 1.8 1.2 0.5 5.5 2.9 5.5 5.5 5.5 2.5 2.0 0.4 0.3 0.7 0.1 0.4 24.2 36.4 4.7 153.4 Résultats

26
Étude comparative Comme la technique géométrique elle est basée sur les pixels de contour Cependant elle ne dépend pas de la segmentation Comme la technique à base dintensité, elle utilise sélectivement toutes les données CT sans segmentation Cependant elle définie automatiquement les ROIs ce qui accélère le calcul.

27
Conclusion et perspectives La convergence de cette technique croit avec chaque étape mais devient plus lourde à chaque passage Lune des perspectives est dintégrer cette technique dans un système totalement automatique pour la navigation et le positionnement des organes à traiter

Présentations similaires


 Hugue Hoppes 1996>")









>")






