Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Intervenants: Hugues BENOIT-CATTIN Chantal MULLER
Signaux et Systèmes Intervenants: Hugues BENOIT-CATTIN Chantal MULLER Département Télécommunications, Services et Usages Année

2
Plan du cours I. Signaux et Systèmes II. Systèmes Linéaires Temporellement Invariants SLTI III. Séries de Fourier IV. Transformée de Fourier en Temps Continu V. Transformée de Fourier en Temps Discret VI. Caractérisation en Temps et Fréquence des signaux et des systèmes VII. Transformée de Laplace VIII. Transformée en Z IX . Echantillonnage

3
I. Signaux et Systèmes 1 - Signaux Temps Continu et Temps Discret 2 - Transformation de la variable indépendante 3 - Signaux exponentiel et sinusoïdaux 4 - Impulsion unité et fonction échelon unité 5 - Systèmes Temps Continu et Temps Discret 6 - Propriétés de bases des systèmes

4
I.1. Signaux Temps Continu et Temps Discret
A) Exemples de signaux et représentation mathématique signal = toute entité qui véhicule une information Exemples: onde acoustique Musique, parole, ... courant électrique délivré par un microphone Les signaux peuvent décrire une très grande variéte de phénomènes physiques. Le signal est porteur d'information et correspond généralement aux variations au cours du temps d'une grandeur physique: électrique, acoustique, lumineuse... Exemples de signaux: - Les variations au cours du temps de la tension aux bornes d'une capacité - vairiation d'un force f appliqué à un vehicule et sa vitesse résultante - enregistrement de la voix par un microphonequi capte les variations de la pression acoustique et qui les convertit en un signal électrique. Dans une image monochromatique, le signal est représenté par les variations de luminosité. source lumineuse (étoile, gaz, …) ... onde lumineuse courant électrique délivré par un spectromètre suite de nombres Mesures physiques ... Photographie
 Exemples de signaux et représentation mathématique. signal = toute entité qui véhicule une information. Exemples: onde acoustique. Musique, parole, ... courant électrique délivré par un microphone. Les signaux peuvent décrire une très grande variéte de phénomènes physiques. Le signal est porteur d information et correspond généralement aux variations au cours du temps d une grandeur physique: électrique, acoustique, lumineuse... Exemples de signaux: - Les variations au cours du temps de la tension aux bornes d une capacité. - vairiation d un force f appliqué à un vehicule et sa vitesse résultante. - enregistrement de la voix par un microphonequi capte les variations de la pression acoustique et qui les convertit en un signal électrique. Dans une image monochromatique, le signal est représenté par les variations de luminosité. source lumineuse. (étoile, gaz, …) ... onde lumineuse. courant électrique délivré par un spectromètre. suite de nombres. Mesures physiques. ... Photographie.")
5
Signaux Temps Continu: Signaux Temps Discret:
Représentation mathématique: Signal = fonction d ’une ou plusieurs variables indépendantes: ex: (Voix) Pression Acoustique = f(temps) (Image) Luminosité= f(x,y:variables spatiales) par la suite: 1 seule variable indépendante = temps Signaux Temps Continu: La variable indépendante est continue t ex: la voix en fonction du temps, la pression atmosphérique en fonction de l ’altitude Exmples de Signaux discrets: Etudes démographiques pour lequel de nombreux attributs tq le budget moyen, le taux de criminalitésont tabulées en fonction de variables discrètes : taille des famille, population totale... Signaux Temps Discret: Définis seulement pour des temps discrets La variable indépendante est un ensemble discret de valeurs n ex: indice Dow-Jones du marché boursier études démographiques ...
 Pression Acoustique = f(temps) (Image) Luminosité= f(x,y:variables spatiales) par la suite: 1 seule variable indépendante = temps. Signaux Temps Continu: La variable indépendante est continue t. ex: la voix en fonction du temps, la pression atmosphérique en fonction de l ’altitude. Exmples de Signaux discrets: Etudes démographiques pour lequel de nombreux attributs tq le budget moyen, le taux de criminalitésont tabulées en fonction de variables discrètes : taille des famille, population totale... Signaux Temps Discret: Définis seulement pour des temps discrets. La variable indépendante est un ensemble discret de valeurs n. ex: indice Dow-Jones du marché boursier études démographiques ...")
6
Exemples: a) d ’un signal continu x(t) b) d ’un signal discret x[n]:
Remarques: Un signal Temps Discret x[n] peut représenter un phénomène pour lequel la variable indépendante est discrète de manière inhérente: données démographiques… Une autre catégorie de signaux Temps Discret provient de l ’échantillonnage de signaux Temps continu. Dans ce cas, le signal x[n]représente les échantillons successif d ’un phénomène sous-jacent pour lequel la variable indépendante est continue. A notre époque, les traitements numériques ont supplante les traitement analogiques grace aux performances des processeurs numériquesen terme de rapidité,de puissance de calculs et de flexibilité... Les systèmes numériques sont présents dans de treès nombreux equipements allant du pilotage automatique d'un avion à un système numérique audio. De tels systèmes necessite l'utilisation de sequences temps-discret representant des versions echantillonnées des signaux temps-continu (ex: position d'une avion, vitesse , voix... x[n] n ’est défini que pour des valeurs entières de n. x[n] : signal Temps Discret ou séquence Temps Discret. 2 types de signaux discrets: a) Signaux représentant un phénomène dont la variable indépendante est discrète b) Signaux provenant d ’une opération d ’échantillonnage: x[n] représente les échantillons successifs d ’un phénomène pour lequel la variable indépendante est continue (niveau quantifié ou non...)
![Exemples: a) d ’un signal continu x(t) b) d ’un signal discret x[n]:](http://slideplayer.fr/slide/513834/2/images/6/Exemples%3A+a%29+d+%E2%80%99un+signal+continu+x%28t%29+b%29+d+%E2%80%99un+signal+discret+x%5Bn%5D%3A.jpg "Remarques: Un signal Temps Discret x[n] peut représenter un phénomène pour lequel la variable indépendante est discrète de manière inhérente: données démographiques… Une autre catégorie de signaux Temps Discret provient de l ’échantillonnage de signaux Temps continu. Dans ce cas, le signal x[n]représente les échantillons successif d ’un phénomène sous-jacent pour lequel la variable indépendante est continue. A notre époque, les traitements numériques ont supplante les traitement analogiques grace aux performances des processeurs numériquesen terme de rapidité,de puissance de calculs et de flexibilité... Les systèmes numériques sont présents dans de treès nombreux equipements allant du pilotage automatique d un avion à un système numérique audio. De tels systèmes necessite l utilisation de sequences temps-discret representant des versions echantillonnées des signaux temps-continu (ex: position d une avion, vitesse , voix... x[n] n ’est défini que pour des valeurs entières de n. x[n] : signal Temps Discret ou séquence Temps Discret. 2 types de signaux discrets: a) Signaux représentant un phénomène dont la variable indépendante est discrète. b) Signaux provenant d ’une opération d ’échantillonnage: x[n] représente les échantillons successifs d ’un phénomène pour lequel la variable indépendante est continue (niveau quantifié ou non...)")
7
B) Energie et puissance d ’un signal
Définition: par analogie avec les signaux électriques Energie Puissance moyenne Temps Continu Temps Discret Un signal Temps Discret x[n] peut représenter un phénomène pour lequel la variable indépendante est discrète de manière inhérente: données démographiques… Une autre catégorie de signaux Temps Discret provient de l ’échantillonnage de signaux Temps continu. Dans ce cas, le signal x[n]représente les échantillons successif d ’un phénomène sous-jacent pour lequel la variable indépendante est continue. A notre époque, les traitements numériques ont supplante les traitement analogiques grace aux performances des processeurs numériquesen terme de rapidité,de puissance de calculs et de flexibilité... Les systèmes numériques sont présents dans de treès nombreux equipements allant du pilotage automatique d'un avion à un système numérique audio. De tels systèmes necessite l'utilisation de sequences temps-discret representant des versions echantillonnées des signaux temps-continu (ex: position d'une avion, vitesse , voix... 3 Classes de signaux: - Signaux à Energie finie - Signaux à Puissance moyenne finie - Signaux à Energie et Puissance moyenne infinies

8
- Signaux à Energie et Puissance Moyenne infinies
- Signaux à Energie finie t 1 - Signaux à Puissance moyenne finie ... 4 n Ex=1 Px=4 - Signaux à Energie et Puissance Moyenne infinies t 1

9
I.2. Transformation de la variable indépendante
A) Exemples de transformations Décalage temporel t 0 < 0 : AVANCE n 0 > 0 : RETARD
 Exemples de transformations. Décalage temporel. t 0 < 0 : AVANCE. n 0 > 0 : RETARD.")
10
Inversion temporelle Changement d ’échelle

11
B) Signaux périodiques
Singnaux périodique: inchangés par un décalage temporel deT Remarques: T0 = période fondamentale = plus petite valeur possible de T

12
C) Signaux Pairs et Impairs
Propriété: Tout signal se décompose en la somme: - d ’un signal pair xpair(t) et - d ’un signal impair ximpair(t)
 et. - d ’un signal impair ximpair(t)")
13
I.3. Signaux exponentiels et sinusoïdaux
A) En Temps Continu Signaux à exponentielle réelle: phénomènes physiques Signaux à exponentielle complexe périodiques et signaux sinusoïdaux:
 En Temps Continu. Signaux à exponentielle réelle: phénomènes physiques. Signaux à exponentielle complexe périodiques et signaux sinusoïdaux:")
14
Remarques : - Signaux à exponentielle complexe périodiques appelés aussi signaux harmoniques - Ensemble d ’exponentielles harmoniquement reliées = Ensemble d ’exponentielles périodiques ayant en commun la période T0 : Signaux à exponentielle réelle et complexe :

15
B) En Temps Discret Signaux à exponentielle réelle:
 En Temps Discret Signaux à exponentielle réelle:")
16
Basses fréquences Hautes fréquences
Signaux à exponentielle complexe et sinusoïdaux: Propriétés liées au Temps Discret: 1) même signal pour des pulsations différentes!... < 0 < 2 < f0 < 1 Le taux d ’oscillations de n ’augmente pas en fonction de 0 !… Basses fréquences Hautes fréquences
 même signal pour des pulsations différentes!... 0 < 0 < 2 0 < f0 < 1. Le taux d ’oscillations de. n ’augmente pas en fonction de 0 !… Basses fréquences. Hautes fréquences.")
17
Sinusoïdes Temps Discret à différentes fréquences

18
Fréquence fondamentale
2) Périodicité: Pas toujours!... Signal périodique si 0 / 2 est un entier ou une fraction rationnelle Alors Fréquence fondamentale Non périodique! périodique périodique non périodique
 Périodicité: Pas toujours!... Signal périodique si 0 / 2 est un entier ou une fraction rationnelle. Alors. Fréquence fondamentale. Non périodique! périodique. périodique. non périodique.")
19
seulement N exponentielles distinctes...
3) Exponentielles reliées harmoniquement seulement N exponentielles distinctes... Signaux à exponentielle réelle et complexe :
 Exponentielles reliées harmoniquement. seulement N exponentielles distinctes... Signaux à exponentielle réelle et complexe :")
20
I.4. Impulsion unité et fonction échelon unité
A) En Temps Discret 1 n Impulsion Unité: Echelon Unité: 1 n ... Relations:
 En Temps Discret. 1. n. Impulsion Unité: Echelon Unité: 1. n. ... Relations:")
21
Impulsion Unité ou Dirac:
B) En Temps Continu u(t) Echelon Unité: t Impulsion Unité ou Dirac: Problème!... On veut: Signal Pulse Impulsion de Dirac
 En Temps Continu. u(t) Echelon Unité: t. Impulsion Unité ou Dirac: Problème!... On veut: Signal Pulse. Impulsion de Dirac.")
22
- représentation de (t): (t) 1
Propriétés du Dirac: Modélisation mathématique issue de la théorie des Distributions (Laurent Schwarzt)... - (t) n ’a pas de durée, sa hauteur est infinie et son aire est égale à l ’unité - représentation de (t): (t) fonction singulière 1 t Besoin des physiciens: d(t) modélise par exemple le courant i(t) d ’un filtre RC lors de la charge d ’un condensateur... - (t) peut être pondéré par un scalaire k.(t) a une aire de k
... - (t) n ’a pas de durée, sa hauteur est infinie et son aire est égale à l ’unité. - représentation de (t): (t) fonction singulière. 1. t. Besoin des physiciens: d(t) modélise par exemple le courant i(t) d ’un filtre RC lors de la charge d ’un condensateur... - (t) peut être pondéré par un scalaire. k.(t) a une aire de k.")
24
I.5. Systèmes Temps Continu et Temps Discret
x[n] y[n] x(t) y(t) Système Temps Continu Système Temps Discret x(t) y(t) x[n] y[n] Exemples: - Relation entre la tension aux bornes d ’un condensateur et la tension d ’entrée - Relation entre la vitesse d ’un véhicule et la force appliquée équations différentielles linéaires du 1er ordre: - Evolution d ’un compte bancaire
 y(t) Système Temps. Continu. Système Temps. Discret. x(t) y(t) x[n] y[n] Exemples: - Relation entre la tension aux bornes d ’un condensateur et la tension d ’entrée. - Relation entre la vitesse d ’un véhicule et la force appliquée. équations différentielles linéaires du 1er ordre: - Evolution d ’un compte bancaire.")
25
Interconnexions de systèmes
Idée: des systèmes complexes peuvent être construits en interconnectant des sous ensembles plus simples... Interconnexion Série Interconnexion Parallèle Système 1 Système 2 + E S Système 1 Système 2 E S Interconnexion Rétro-actionnée Système 1 Système 2 + E S

26
I.6. Propriétés de base des systèmes
Système sans mémoire: La sortie y à l ’instant t ou n ne dépend que de l ’entrée x à ce même instant Système inversible: Des entrées distinctes conduisent à des sorties distinctes Système Système inverse x[n] y[n] w[n]=x[n] Système causal: La sortie à n ’importe quel instant ne dépend que des valeurs de l ’entrée aux instants présent et passés

27
x[n-n0] y[n-n0] x(t-t0) y(t-t0)
Système stable: A une entrée bornée: |x(t)| M t correspond une sortie bornée |y(t)| N t Système temporellement invariant : Un décalage temporel sur le signal d ’entrée entraîne le même décalage temporel sur le signal de sortie x[n-n0] Système y[n-n0] x(t-t0) Système y(t-t0) Système linéaire: Propriété de superposition Soit Alors
![x[n-n0] y[n-n0] x(t-t0) y(t-t0)](http://slideplayer.fr/slide/513834/2/images/27/x%5Bn-n0%5D+y%5Bn-n0%5D+x%28t-t0%29+y%28t-t0%29.jpg "Système stable: A une entrée bornée: |x(t)| M t correspond une sortie bornée |y(t)| N t. Système temporellement invariant : Un décalage temporel sur le signal d ’entrée entraîne le même décalage temporel sur le signal de sortie. x[n-n0] Système. y[n-n0] x(t-t0) Système. y(t-t0) Système linéaire: Propriété de superposition. Soit. Alors.")
28
II. Systèmes Linéaires Temporellement Invariants SLTI
1 - SLTI Temps Discret: Somme de Convolution 2 - SLTI Temps Continu: Intégrale de Convolution 3 - Propriétés des SLTI 4 - SLTI causaux décrits par des équations différentielles et par des équations aux différences

29
II.1 SLTI Temps Discret: Somme de Convolution
Etude d ’un sous-ensemble de systèmes: Nb Propriétés Systèmes Linéaires Temporellement Invariants Outils puissants A) Représentation d ’un signal Temps Discret à l ’aide des signaux impulsions Somme pondérée d ’impulsions décalées temporellement SLTI: propriétes de superposition Le signal d'entrée peut se représenter en terme de combinaison linéaire d'un ensemble de signaux de base. Utilisation de la superposition pour calculer la sortir du système comme "in terms"?? de ses réponses à ses signaux de base...
 Représentation d ’un signal Temps Discret à l ’aide des signaux impulsions. Somme pondérée d ’impulsions. décalées temporellement. SLTI: propriétes de superposition. Le signal d entrée peut se représenter en terme de combinaison linéaire d un ensemble de signaux de base. Utilisation de la superposition pour calculer la sortir du système comme in terms de ses réponses à ses signaux de base...")
30
Principe de superposition
B) Réponse d ’un SLTI Temps Discret a) Réponse d ’un système linéaire (pas forcément T.I.) Signal d ’entrée Si Alors: Principe de superposition
 Réponse d ’un SLTI Temps Discret. a) Réponse d ’un système linéaire (pas forcément T.I.) Signal d ’entrée. Si. Alors: Principe de superposition.")
31
Interprétation graphique de la réponse d ’un système linéaire Temps Discret
La réponse au signal x[n] est une combinaison linéaire des réponses associées à chaque impulsion décalée temporellement

32
SLTI entièrement caractérisé par sa réponse impulsionnelle
b) Réponse d ’un SLTI Il suffit de connaître la réponse h0[n] à [n] ... Invariance Temporelle Définition: Réponse impulsionnelle = Réponse d ’un SLTI à l ’impulsion unité [n] SLTI h[n] On obtient: Somme de convolution SLTI entièrement caractérisé par sa réponse impulsionnelle
 Réponse d ’un SLTI. Il suffit de connaître la réponse h0[n] à [n] ... Invariance Temporelle Définition: Réponse impulsionnelle = Réponse d ’un SLTI à l ’impulsion unité. [n] SLTI. h[n] On obtient: Somme de convolution. SLTI entièrement caractérisé par sa réponse impulsionnelle.")
33
C) Exemple de calcul de l ’opération de convolution
Inversion de h[k] en h[-k] Décalage temporel h[n-k] Résultat de la convolution y[n]

34
II.2 SLTI Temps Continu: Intégrale de Convolution
A) Représentation d ’un signal Temps Continu à l ’aide des impulsions de Dirac
 Représentation d ’un signal Temps Continu à l ’aide des impulsions de Dirac.")
35
« Somme » pondérée d ’impulsions de Dirac décalées temporellement
B) Réponse d ’un SLTI Temps Continu a) Réponse d ’un système linéaire (pas forcément T.I.) Signal d ’entrée: Si: Principe de superposition Alors:
 Réponse d ’un SLTI Temps Continu. a) Réponse d ’un système linéaire (pas forcément T.I.) Signal d ’entrée: Si: Principe de superposition. Alors:")
36
Interprétation graphique de la réponse d ’un système linéaire Temps Continu
La réponse au signal est une combinaison linéaire des réponses associées à chaque pulse décalé temporellement avec réponse à

37
Invariance Temporelle
b) Réponse d ’un SLTI Signal d ’entrée: Signal de sortie: Invariance Temporelle Définition: Réponse impulsionnelle = Réponse d ’un SLTI à l ’impulsion de Dirac (t) SLTI h(t) On obtient: Intégrale de convolution SLTI entièrement caractérisé par sa réponse impulsionnelle
 Réponse d ’un SLTI. Signal d ’entrée: Signal de sortie: Invariance Temporelle Définition: Réponse impulsionnelle = Réponse d ’un SLTI à l ’impulsion de Dirac. (t) SLTI. h(t) On obtient: Intégrale de convolution. SLTI entièrement caractérisé par sa réponse impulsionnelle.")
38
C) Exemple de calcul de l ’intégrale de convolution
Exemples: John Hopkins University: « Joy of convolution » Simon Fraser University (Vancouver):
:")
40
II.3 Propriétés des SLTI Systèmes entièrement caractérisés par leur réponse impulsionnelle Commutativité x[n] h[n] y[n] h[n] x[n] y[n]

41
Distributivité (IDEM T.C.) Une combinaison parallèle de plusieurs SLTI peut remplacer un seul SLTI dont la réponse impulsionnelle est la somme des réponses impulsionnelles des SLTI interconnectés

42
Associativité (IDEM T.C.) Une combinaison série de plusieurs SLTI peut remplacer un seul SLTI dont la réponse impulsionnelle est la convolution des réponses impulsionnelles des SLTI interconnectés La réponse impulsionnelle d ’un SLTI résultant de l ’interconnexion série de plusieurs SLTI ne dépend pas de l ’ordre dans lequel ils ont été cascadés

43
Multiplication par un scalaire
(IDEM T.C.) Elément neutre: Décalage temporel: (IDEM T.C.) Très important Dérivation:
 Elément neutre: Décalage temporel: (IDEM T.C.) Très important. Dérivation:")
44
SLTI sans mémoire SLTI inversible SLTI causal SLTI stable
(IDEM T.C.) SLTI inversible SLTI causal SLTI stable Sa réponse impulsionnelle est absolument sommable Sa réponse impulsionnelle est absolument intégrable
 SLTI inversible. SLTI causal. SLTI stable. Sa réponse impulsionnelle est absolument sommable. Sa réponse impulsionnelle est absolument intégrable.")
45
Réponse d ’un SLTI à l ’échelon unité
Réponse indicielle: Réponse indicielle utilisée aussi pour caractériser un SLTI

46
Description de phénomènes physiques TC:
II.4 SLTI causaux décrits par des équations différentielles et des équations aux différences A) Equations différentielles linéaires à coefficients constants Description de phénomènes physiques TC: Réponse d ’un circuit RC, vitesse d ’un véhicule soumis à une accélération et des forces de frottement ... Exemple Spécification implicite du système relation ou contrainte entre l ’entrée et la sortie a) Pour avoir une expression explicite résoudre l ’équation, trouver y(t) génerale b) Pour trouver une solution unique Informations complémentaires, appliquer les conditions initiales Rappels: Résolution d ’une équation différentielle à coefficients constants : solution particulière vérifiant (1) de même forme que l ’entrée : solution de l ’équation homogène
 Equations différentielles linéaires à coefficients constants. Description de phénomènes physiques TC: Réponse d ’un circuit RC, vitesse d ’un véhicule soumis à une accélération et des forces de frottement ... Exemple. Spécification implicite du système relation ou contrainte entre l ’entrée et la sortie. a) Pour avoir une expression explicite résoudre l ’équation, trouver y(t) génerale. b) Pour trouver une solution unique Informations complémentaires, appliquer les conditions initiales. Rappels: Résolution d ’une équation différentielle à coefficients constants. : solution particulière vérifiant (1) de même forme que l ’entrée. : solution de l ’équation homogène.")
47
Application des Conditions Initiales
D ’où: infinité de solutions Application des Conditions Initiales Cas particulier SLTI CAUSAL + CI de SIAR: Système Initialement Au Repos Définition: Un système causal est initialement au repos, si sa sortie est nulle tant que son entrée est nulle D ’où:

48
Propriété 1 Un système, régi par une équation différentielle à coefficients constants, initialement au repos, est un SLTI IAR autrement dit un système convolutif Propriété 2 La solution yIAR(t) d’un système régi par une équation différentielle à coefficients constants et initialement au repos, est égale au produit de convolution de la réponse impulsionnelle h(t) du SLTI par l ’entrée x(t) appliqué au système Propriété 3 Dans le cas général, la solution y (t) d’un système régi par une équation différentielle à coefficients constants et non initialement au repos, peut se décomposer en la somme de yIAR (t) solution du système initialement au repos et de yZI(t) solution du système avec une entrée nulle et les conditions initiales réelles
 d’un système régi par une équation différentielle à coefficients constants et initialement au repos, est égale au produit de convolution de la réponse impulsionnelle h(t) du SLTI par l ’entrée x(t) appliqué au système. Propriété 3. Dans le cas général, la solution y (t) d’un système régi par une équation différentielle à coefficients. constants et non initialement au repos, peut se décomposer en la somme de yIAR (t) solution du système initialement au repos et de yZI(t) solution du système avec une entrée nulle et les conditions initiales réelles.")
49
Cas particulier: SLTI CAUSAL , Système Initialement au Repos
B) Equations aux différences linéaires à coefficients constants Même méthode de résolution que pour les équations différentielles à coefficients constants Mêmes propriétés 1, 2 et 3 ... Cas particulier: SLTI CAUSAL , Système Initialement au Repos Éq. récursive Éq. non récursive Si N=0 SLTI Système FIR Équation récursive Réponse impulsionnelle du SLTI initialement au repos, de durée infini Si N 1 Système IIR
 Equations aux différences linéaires à coefficients constants. Même méthode de résolution que pour les équations différentielles à coefficients constants. Mêmes propriétés 1, 2 et Cas particulier: SLTI CAUSAL , Système Initialement au Repos. Éq. récursive. Éq. non récursive. Si N=0. SLTI. Système FIR. Équation récursive Réponse impulsionnelle du SLTI initialement au repos, de durée infini. Si N 1. Système IIR.")
50
III. Séries de Fourier 1 - Réponse d ’un SLTI à des exponentielles complexes 2 - Représentation en Série de Fourier des Signaux périodiques en Temps Continu 3 - Représentation en Série de Fourier des Signaux périodiques en Temps Discret 4 - Séries de Fourier et SLTI 5 - Filtrage

51
Jean-Baptiste Joseph Fourier
III. Séries de Fourier Avant propos Merci M. Fourier!... Jean-Baptiste Joseph Fourier 21/03/1768 (Auxerre) - 16/05/1830
 - 16/05/1830.")
52
III.1 Réponse d ’un SLTI aux exponentielles complexes
Idées : 1- Rechercher des signaux de base pouvant construire une grande classe de signaux par simple combinaison linéaire 2- Réponses du SLTI à ces signaux suffisamment simples pour pouvoir déduire la réponse à n ’importe quel signal d ’entrée construit à partir de ces signaux de base Analyse de Fourier montre que les exponentielles complexes en TC et TD vérifient ces propriétés : En temps continu: En temps discret: Propriété 1: un peu plus tard…

53
fonctions de transfert du système
Propriété 2: La réponse d ’un SLTI à une exponentielle complexe n ’est autre que la même exponentielle complexe multipliée par une amplitude complexe valeur propre En temps continu: vecteurs propres En temps discret: On démontre que: valeur propre En temps continu: H(s) et H(z) fonctions de transfert du système En temps discret: Exercices:
 et H(z) fonctions de transfert du système. En temps discret: Exercices:")
54
Quelques exemples de signaux périodiques
Sinusoïde Rectangle périodique Triangle périodique Dent de scie

55
III.2 Représentation des signaux périodiques T.C. en série de Fourier
Tout signal périodique de puissance finie peut se représenter sous la forme d ’une combinaison linéaire d ’exponentielles complexes reliées harmoniquement Synthèse Analyse coefficient de Fourier ou coefficient spectral Euler:

56
Valeur moyenne du signal sur une période T
Composante continue: Valeur moyenne du signal sur une période T Composante fondamentale ou 1er harmonique: Signal de même fréquence que le signal périodique f0 = 1/T kième harmonique: Signal de fréquence f = kf Tk=T/k Exercices: Trouver les développements en série de Fourier complexe de:

57
Forme trigonométrique:
Tout signal périodique réel de puissance finie peut être représenté par une combinaison linéaire de sinus et de cosinus Ak et Bk : Coefficients de Fourier réels 1(4/) 1+ 3 (4/3) Ak=0 (4/5) (4/7) (signal impaire) Rapport cyclique =1/2 B2k=0 (fondamentale) Lien avec la série exponentielle: Fréquence fondamentale: Composante continue: fg
 1+ 3 (4/3) Ak= (4/5) (4/7) (signal impaire) Rapport cyclique =1/2 B2k=0. (fondamentale) Lien avec la série exponentielle: Fréquence fondamentale: Composante continue: fg.")
58
Exemples de Coefficients de Fourier
Le spectre du signal Pour ça ? T=5t Regraduons l ’axe des n en fréquence ...

59
Propriétés des Séries de Fourier en Temps Continu
Linéarité Décalage temporel Inversion temporelle x(t) paire Xk paire x(t) impaire Xk impaire Changement d ’échelle x(t) : T, 0 x(t) : T/, 0 Xn inchangé, mais représentation de la série de Fourier modifiée Multiplication Convolution discrète de même période T
 paire Xk paire. x(t) impaire Xk impaire. Changement d ’échelle. x(t) : T, 0 x(t) : T/, 0. Xn inchangé, mais représentation de la série de Fourier modifiée. Multiplication. Convolution discrète. de même période T.")
60
Conjugaison Relation de Parseval
Symétrie conjuguée x(t) réel x(t) réel et paire Xk réel et paire x(t) réel et impaire Xk imaginaire et impaire Relation de Parseval La puissance moyenne d ’un signal périodique est égale à la somme des puissances moyennes de toutes ses composantes harmoniques
 réel x(t) réel et paire Xk réel et paire. x(t) réel et impaire Xk imaginaire et impaire. Relation de Parseval. La puissance moyenne d ’un signal périodique est égale à la somme des puissances moyennes de toutes ses composantes harmoniques.")
61
III.3 Représentation des signaux périodiques T.D. en série de Fourier
Signal périodique Période N Fréquence fondamentale: 0= 2/N Problème: Prenons: Ensemble des signaux périodiques avec la période N: Seulement N exponentielles distinctes Représentation d ’un signal périodique avec les séquences Seulement N distinctes Série de Fourier Temps Discret Série Finie

62
Décomposition en Série de Fourier d’un signal périodique discret
Tout signal discret périodique (période N) peut être représenté par une combinaison linéaire de N exponentielles complexes discrètes reliées harmoniquement Synthèse Coefficient de Fourier ou Coefficient spectral Analyse Remarque Donc: ... Les coefficient Xk sont périodiques de période N La représentation en Série de Fourier Temps Discret est une série FINIE de N termes
 peut être représenté par une combinaison linéaire de N exponentielles complexes discrètes reliées harmoniquement. Synthèse. Coefficient de Fourier ou Coefficient spectral. Analyse. Remarque. Donc: ... Les coefficient Xk sont périodiques de période N. La représentation en Série de Fourier Temps Discret est une série FINIE de N termes.")
63
Convolution discrète périodique
Propriétés des Séries de Fourier en Temps Discret Multiplication Convolution discrète périodique z[n] périodique N Zk périodique N Décalage temporelle Différenciation Parseval La puissance moyenne d ’un signal périodique est égale à la somme des puissances moyennes de ses N composantes harmoniques

64
III.4 Séries de Fourier et SLTI
Fonctions de Transfert: T.C. : T.D. : Avec h() , h[k] réponses impulsionnelles des SLTI Réponses fréquentielles: T.C. : T.D. : Réponse d ’un SLTI à une exponentielle complexe Réponse d ’un SLTI à un signal sinusoïdal
 , h[k] réponses impulsionnelles des SLTI. Réponses fréquentielles: T.C. : T.D. : Réponse d ’un SLTI à une exponentielle complexe. Réponse d ’un SLTI à un signal sinusoïdal.")
65
Réponse d’un SLTI à une entrée périodique
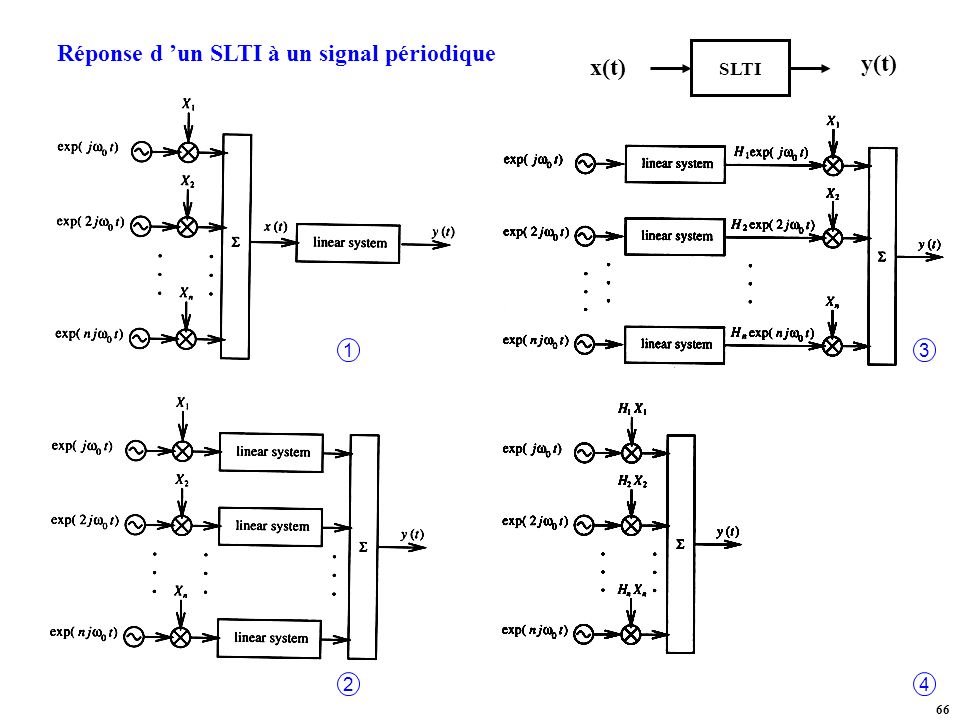
Principe de superposition La réponse d ’un SLTI à une combinaison de plusieurs signaux d ’entrée peut se déterminer en faisant la somme des réponses individuelles à chacun de ces signaux Temps Continu Temps Discret Signal d ’entrée périodique Réponse fréquentielle du SLTI Réponse du SLTI au signal périodique Coefficient de Fourier de la sortie périodique

66
Réponse d ’un SLTI à un signal périodique x(t) y(t)
1 3 2 4
67
Filtres idéaux Temps Continu Filtres idéaux Temps Discret
III.5 Filtrage Intérêt: Changer la forme d ’un spectre, laisser passer certaines fréquences et en atténuer ou éliminer d ’autres Filtres sélectifs Filtres idéaux Temps Continu Filtres idéaux Temps Discret Passe Bas Passe Haut Passe Bande Périodicité 2 : HF pour = (2k+1)
")
68
Exemples de filtres Temps Continu
Résolution des équations différentielles à coefficients constants Systèmes décrits par des équations différentielles à coefficients constants et initialement au repos sont des SLTI Exemple: Filtre Passe-Bas RC R C VS(t) VC(t) + - Exemple: Filtre Passe-Haut RC R C VS(t) VR(t) + -
 VC(t) + - Exemple: Filtre Passe-Haut RC. R. C. VS(t) VR(t) + -")
69
Exemples de filtres Temps Discret
Résolution des équations aux différences à coefficients constants Systèmes décrits par des équations aux différences à coefficients constants et initialement au repos sont des SLTI Filtre récursif du 1er ordre (IIR: Infinite Impulse Response) Filtre non récursif (FIR: Finite Impulse Response) Filtre à moyenne glissante
 Filtre non récursif (FIR: Finite Impulse Response) Filtre à moyenne glissante.")
70
IV. Transformée de Fourier en Temps Continu
1 - Signaux Apériodiques: Transformée de Fourier Temps Continu 2 - Paires de Transformées de Fourier en Temps Continu 3 - Propriétés de la TF Temps Continu 4 - Propriété de la convolution 5 - Propriété de la multiplication 6 - Signaux Périodiques et Transformée de Fourier 7 - Réponse fréquentielle d’un SLTI régi par des équations différentielles linéaires à coefficients constants

71
Enveloppe des échantillons
5w0 10w0 10w0 20w0 20w0 40w0

72
IV.1 Signaux Apériodiques: Transformée de Fourier T.C.
Rappels: Signaux périodiques (T) à puissance finie - Série de Fourier t -T1 T1 T 2T -T ... Somme infinie d ’exponentielles complexes reliées harmoniquement - Spectre discret x(t) t -T1 T1 Or: Soit: Enveloppe des échantillons T.Xk Intégrale de Fourier Si
 à puissance finie - Série de Fourier. t. -T1. T1. T. 2T. -T. ... Somme infinie d ’exponentielles complexes reliées harmoniquement - Spectre discret. x(t) t. -T1. T1. Or: Soit: Enveloppe des échantillons T.Xk. Intégrale de Fourier. Si.")
73
Série de Fourier Transformée de Fourier
Signaux périodiques Période T Puissance Finie Somme infinie d ’exponentielles complexes reliées harmoniquement Spectre discret apériodique 1 k 2 X 2T T t Transformée de Fourier Transformée de Fourier Inverse (Synthèse) Signaux apériodiques Période T Energie Finie Intégrale infinie d ’exponentielles complexes Spectre continu apériodique X(j) x(t) T t Transformée de Fourier Directe (Analyse)
 Signaux apériodiques Période T Energie Finie. Intégrale infinie d ’exponentielles complexes. Spectre continu apériodique. X(j) x(t) T. t. Transformée de Fourier Directe (Analyse)")
74
Transformée de Fourier en Temps Continu pour des Signaux Apériodiques
Pulsation Fréquence

75
IV.2 Paires de Transformées de Fourier en TC
Signaux TF fréquence TF pulsation Peigne de Dirac

76
Principales paires de la Transformée de Fourier Temps Continu

77
IV.3 Propriétés de la TF Temps Continu
Linéarité Changement d ’échelle Contraction Temporelle ( >1) Dilatation Fréquentielle Dualité Décalage Dérivation
 Dilatation Fréquentielle. Dualité. Décalage. Dérivation.")
78
Densité Spectrale d’Energie du signal x(t)
Conjugaison Cas particulier: x(t) réel Symétrie conjuguée: x(t) réel et paire X(j) réel et paire x(t) réel et impaire X (j) imaginaire et impaire Relation de Parseval Densité Spectrale d’Energie du signal x(t) Energie total d ’un signal = Energie par unité de temps intégrée sur tous les temps = Densité spectrale d ’énergie intégrée sur toutes les fréquences
 réel Symétrie conjuguée: x(t) réel et paire X(j) réel et paire. x(t) réel et impaire X (j) imaginaire et impaire. Relation de Parseval. Densité Spectrale d’Energie du signal x(t) Energie total d ’un signal = Energie par unité de temps intégrée sur tous les temps = Densité spectrale d ’énergie intégrée sur toutes les fréquences.")
79
IV.4 Propriété de la convolution
Recherchons la TF de y(t)=x(t)*h(t) Rappel: vrai si SLTI Stable h(t) x(t) y(t) = x(t) * h(t) H(f) X(f) Y(f) = X(f) . H(f) TF h(t): réponse impulsionnelle du SLTI H(j): réponse fréquentielle du SLTI
=x(t)*h(t) Rappel: vrai si SLTI Stable. h(t) x(t) y(t) = x(t) * h(t) H(f) X(f) Y(f) = X(f) . H(f) TF. h(t): réponse impulsionnelle du SLTI. H(j): réponse fréquentielle du SLTI.")
80
IV.5 Propriété de la multiplication Modulation d ’amplitude
signal modulé signal modulant porteuse S(f) Exemple A Porteuse: -f1 f1 f P(f) -f0 f0 1/2 f R(f) -f0-f1 -f0 +f1 f0 -f1 f0 +f1 -f0 f0 A/2 A/2 f
 Exemple. A. Porteuse: -f1. f1. f. P(f) -f0. f0. 1/2. f. R(f) -f0-f1. -f0 +f1. f0 -f1. f0 +f1. -f0. f0. A/2. A/2. f.")
81
Exemple: Démodulation d ’amplitude
-f0-f1 -f0 +f1 f0 -f1 f0 +f1 -f0 f0 f R(f) A/2 P(f) -f0 f0 1/2 Porteuse: G(f) A/2 A/4 A/4 -f0 f0 -2f0 2f0 f H(f) H(f) Filtre Passe-Bas -fc fc f H(0) A/2 Y(f) = G(f) H(f) Y(f) = G(f) H(f) y(t) ~ s(t) f
 A/2. P(f) -f0. f0. 1/2. Porteuse: G(f) A/2. A/4. A/4. -f0. f0. -2f0. 2f0. f. H(f) H(f) Filtre Passe-Bas. -fc. fc. f. H(0) A/2. Y(f) = G(f) H(f) Y(f) = G(f) H(f) y(t) ~ s(t) f.")
82
Propriétés de la Transformée de Fourier Temps Continu

83
IV.6 Signaux Périodiques et Transformée de Fourier
A/ Extension de la TF en Temps Continu Considérons l ’impulsion Un signal périodique se décompose en Série de Fourier ... f f0 2f0 3f0 -f0 -2f0 Train d ’impulsions de Dirac pondérées par les coefficients de Fourier Xk et situées aux fréquences f = kf0 Par identification

84
Comparaison entre la décomposition en Série de Fourier d ’un signal périodique et sa Transformée de Fourier xp(t) T1 T -T T= 4 T1 X k k
 T1. T. -T. T= 4 T1. X k. k.")
85
Propriété de la convolution
B/ Expression simple de la TF d ’un signal périodique en TC Tout signal périodique xp(t) peut être représenté comme la somme d ’une suite infinie de translatées de x(t) motif élémentaire sur [0, T] xp(t) 2T T t 3T ... t T ... t T 2T 3T -T Or: 1/T 2/T 3/T f D ’où: Propriété de la convolution 1/T f 2/T 3/T La TF permet d ’obtenir directement les coefficients de Fourier!
 peut être représenté comme la somme d ’une suite infinie de translatées de x(t) motif élémentaire sur [0, T] xp(t) 2T. T. t. 3T. ... t. T. ... t. T. 2T. 3T. -T. Or: 1/T. 2/T. 3/T. f. D ’où: Propriété de la convolution. 1/T. f. 2/T. 3/T. La TF permet d ’obtenir. directement les coefficients de Fourier!")
86
IV.7 Réponse fréquentielle d’un SLTI régi par des équations différentielles linéaires à coefficients constants Hypothèse: H(j) existe (converge) Propriété des SLTI: Or:
 existe (converge) Propriété des SLTI: Or:")
87
V. Transformée de Fourier en Temps Discret
1 - Signaux Apériodiques: Transformée de Fourier Temps Discret 2 - Propriétés de la TF Temps Discret 3 - Propriété de la convolution 4 - Propriété de la multiplication 5 - Signaux périodiques et Transformée de Fourier Temps Discret 6 - Calcul de la Transformée de Fourier d’une suite numérique 7 - Réponse fréquentielle d’un SLTI régi par des équations aux différences linéaires à coefficients constants Résumé Séries de Fourier - Transformées de Fourier

88
V.1 Signaux Apériodiques: Transformée de Fourier T.D.
Série de Fourier Signaux périodiques Période N Puissance Finie Somme finie de N exponentielles complexes reliées harmoniquement Spectre discret et périodique x[n] k 1 X k N ... ... N 2N Transformée de Fourier Inverse (Synthèse) Transformée de Fourier Signaux apériodiques Période N Energie Finie Intégrale sur une période d ’exponentielles complexes Spectre continu et périodique X(ej) 2p x[n] N n Transformée de Fourier Directe (Analyse)
 Transformée de Fourier. Signaux apériodiques Période N Energie Finie. Intégrale sur une période d ’exponentielles complexes. Spectre continu et périodique. X(ej) 2p. x[n] N. n. Transformée de Fourier Directe (Analyse)")
89
Principales paires de la Transformée de Fourier Temps Discret

90
V.4 Propriétés de la TF Temps Discret
Périodicité Linéarité Inversion temporelle Décalage Dérivation

91
xk: « version ralentie » de x[n]
Changement d ’échelle xk: « version ralentie » de x[n] Soit:
![xk: « version ralentie » de x[n]](http://slideplayer.fr/slide/513834/2/images/91/xk%3A+%C2%AB+version+ralentie+%C2%BB+de+x%5Bn%5D.jpg "Changement d ’échelle. xk: « version ralentie » de x[n] Soit:")
92
Densité Spectrale d’Energie du signal x(t)
Conjugaison Cas particulier: x[n] réel Symétrie conjuguée: x[n] réel et paire X(e j) réel et paire x[n] réel et impaire X (e j) imaginaire et impaire Relation de Parseval Densité Spectrale d’Energie du signal x(t) Energie total d ’un signal = Energie par unité de temps sommée sur tous les temps = Densité spectrale d ’énergie intégrée sur une période
 réel et paire. x[n] réel et impaire X (e j) imaginaire et impaire. Relation de Parseval. Densité Spectrale d’Energie du signal x(t) Energie total d ’un signal = Energie par unité de temps sommée sur tous les temps = Densité spectrale d ’énergie intégrée sur une période.")
93
V.5 Propriété de la convolution
x[n] h [n] y [n] = x [n] * h [n] h[n]: réponse impulsionnelle du SLTI H(e j): réponse fréquentielle du SLTI TF TF TF X(f) H(f) Y(f) = X(f) . H(f) Rappel: vrai si SLTI Stable
: réponse fréquentielle du SLTI. TF. TF. TF. X(f) H(f) Y(f) = X(f) . H(f) Rappel: vrai si SLTI Stable.")
94
V.6 Propriété de la multiplication
Attention: Convolution périodique

95
Propriétés de la Transformée de Fourier Temps Discret

96
A/ Extension de la TF en Temps Discret situées aux fréquences f = k/N
V.2 Signaux périodiques : Extension de la TF Temps Discret ... f f0 f0+1 f0+2 f0-1 f0-2 A/ Extension de la TF en Temps Discret Soit le peigne de Dirac: Montrons que: (Hypothèse 0<f0<1 ) Un signal périodique se décompose en Série de Fourier Train d ’impulsions de Dirac pondérées par les coefficients de Fourier périodiques et situées aux fréquences f = k/N Par identification
 Un signal périodique se décompose en Série de Fourier. Train d ’impulsions de Dirac pondérées par les coefficients de Fourier périodiques et. situées aux fréquences f = k/N. Par identification.")
97
B/ Expression simple de la TF d ’un signal périodique en TD
Tout signal périodique xp(t) peut être représenté comme la somme d ’une suite infinie de translatées de x[n] motif élémentaire sur [0, N] xp[n] x[n] N n ... ... N 2N 3N n ... t N 2N 3N -N Or: D ’où: f X(f) 1 Propriété de la convolution ... ... Xp (f) ... ... La TF permet d ’obtenir directement les coefficients de Fourier! 1/N 1 f
 peut être représenté comme la somme d ’une suite infinie de translatées de x[n] motif élémentaire sur [0, N] xp[n] x[n] N. n N. 2N. 3N. n. ... t. N. 2N. 3N. -N. Or: D ’où: f. X(f) 1. Propriété de la convolution Xp (f) La TF permet d ’obtenir. directement les coefficients de Fourier! 1/N. 1. f.")
98
V.3 Calcul de la Transformée de Fourier d’une suite numérique
Pour calculer la Transformée de Fourier d ’un signal numérique fini de N points (TFD ou DFT), - on périodise implicitement le signal et - on rajoute éventuellement des 0 (Nz), pour avoir une TFD sur (N+Nz) points. Généralement le calcul se fait avec N+Nz = 2n points, grâce à l ’algorithme de Transformée de Fourier Rapide (TFR ou FFT) mis au point par Cooley et Tukey (1965) Remarque:
, - on périodise implicitement le signal et - on rajoute éventuellement des 0 (Nz), pour avoir une TFD sur (N+Nz) points. Généralement le calcul se fait avec N+Nz = 2n points, grâce à l ’algorithme de Transformée de Fourier Rapide (TFR ou FFT) mis au point par Cooley et Tukey (1965) Remarque:")
99
V.7 Réponse fréquentielle d’un SLTI régi par des équations aux différences linéaires à coefficients constants Hypothèse: H(e j) existe (converge) Propriété des SLTI: Or: linéarite + décalage temporelle
 existe (converge) Propriété des SLTI: Or: linéarite + décalage temporelle. ")
100
Résumé Séries de Fourier - Transformées de Fourier
Signaux périodiques Spectre discret apériodique 1 k 2 X 2T T t Signaux apériodiques Spectre continu apériodique X(j) x(t) T t Signaux périodiques Spectre discret périodique x[n] 1 X k N N 2N ... k Signaux apériodiques Spectre continu périodique X(e j) 2p x[n] N n
 x(t) T. t. Signaux périodiques. Spectre discret périodique. x[n] 1. X k. N. N. 2N. ... k. Signaux apériodiques. Spectre continu périodique. X(e j) 2p. x[n] N. n.")
101
VI. Caractérisation en Temps et Fréquence des Signaux et Systèmes
1 - Représentation en Amplitude et en Phase de la Transformée de Fourier 2 - Représentation en Amplitude et en Phase de la réponse fréquentielle des SLTI 3 - Filtres non idéaux- Aspects dans les domaines Temporel et Fréquentiel 4 - Systèmes du 1er ordre et du 2nd ordre en Temps Continu 5 - Systèmes du 1er ordre et du 2nd ordre en Temps Discret 6 - Filtres non-récursifs en Temps Discret - Filtres FIR

102
Amplitude et Phase de la TF:
VI.1 Représentation en Amplitude et en Phase de la Transformée de Fourier Amplitude et Phase de la TF: Amplitude Contenu fréquentiel du signal Densité spectrale d ’énergie de x(t) Phase Information sur la phase des différentes fréquences composant le signal Des signaux qui ont 1 TF avec amplitude = mais 1 phase peuvent être très différents Exemple:
 Phase. Information sur la phase des différentes fréquences composant le signal. Des signaux qui ont 1 TF avec amplitude = mais 1 phase peuvent être très différents. Exemple:")
103
DECALAGE DE PHASE du système Phase Linéaire et Phase Non Linéaire
VI.2 Représentation en amplitude et en phase de la la réponse fréquentielle d’un SLTI SLTI D ’où: GAIN du système DECALAGE DE PHASE du système Si effets négatifs: Distorsion d ’Amplitude et Distorsion de Phase... Phase Linéaire et Phase Non Linéaire Phase linéaire avec Phase linéaire avec Le signal d’entrée est simplement décalé temporellement (décalage = pente de la phase), il n’est pas déformé
, il n’est pas déformé.")
104
Cas particulier: Phase linéaire
Exemple Retard de Groupe Le retard de groupe à une fréquence est égal à l ’opposé de la pente de la phase à cette fréquence Cas particulier: Phase linéaire ou

105
Réponse impulsionnelle
Exemple Etude d ’un système passe-tout, dont le retard de groupe varie en fonction de la fréquence avec f1= 50Hz f1= 150Hz f1= 300Hz unwrapped phase Réponse impulsionnelle

106
Amplitude Logarithmique - Diagramme de Bode
Intérêt de l ’échelle logarithmique Les amplitudes s ’ajoutent ... Unité: le décibel (dB): 0dB |H(jw)| = 1 6dB |H(jw)| = 2 -3dB |H(jw)| = 1/2 20dB |H(jw)| = 10 Diagramme de Bode: et en fonction de Pour les systèmes Temps Continu Exemple: Système du 2nd ordre
: 0dB |H(jw)| = 1. 6dB |H(jw)| = 2. -3dB |H(jw)| = 1/2. 20dB |H(jw)| = 10. Diagramme de Bode: et. en fonction de. Pour les systèmes Temps Continu. Exemple: Système du 2nd ordre.")
107
Bande passante et Largeur de bande
Caractérise un système Module de la réponse en fréquence Définie à -3dB (1/2) (Pm/2) Largeur de bande Caractérise un signal Densité Spectrale Espace des fréquences utiles !
 (Pm/2) Largeur de bande. Caractérise un signal. Densité Spectrale. Espace des fréquences utiles !")
108
Précision, sélectivité
VI.3 Filtres non idéaux- Aspects dans les domaines Temporel et Fréquentiel Rappel: Filtres idéaux non réalisables car non causaux ... - c c -p H(e j) -2p p 2p H(j) - c c compromis Précision, sélectivité Coût, Complexité Flexibilité pour le comportement du filtre : - dans la Bande Passante - dans la Bande Coupée dans la zone de transition
 -2p. p. 2p. H(j) - c. c. compromis. Précision, sélectivité. Coût, Complexité. Flexibilité pour le comportement du filtre : - dans la Bande Passante. - dans la Bande Coupée - dans la zone de transition.")
109
VI.4 Systèmes du 1er ordre et du 2nd ordre en Temps Continu
Système du 1er ordre Constante de temps Rapidité de réponse du système Ex: R C x(t) + - y(t) Réponse impulsionnelle Réponse indicielle
 + - y(t) Réponse impulsionnelle. Réponse indicielle.")
110
Diagramme de Bode Asymptote en HF: Pente de 20 dB / décade
Fréquence de coupure à 3dB FIG

111
: Facteur d ’amortissement
Système du 2nd ordre : Fréquence propre : Facteur d ’amortissement Régime Amorti h(t) = différence de 2 exponentielles réelles décroissantes Régime Critique Régime Pseudo-Périodique
 = différence de 2 exponentielles réelles décroissantes. Régime Critique. Régime Pseudo-Périodique.")
112
Facteur de qualité Amplification pour < 0.7

113
VI.5 Systèmes du 1er ordre et du 2nd ordre en Temps Discret
Système du 1er ordre Rapidité de réponse du système Fig p 462

115
Système du 2nd ordre Équivalent au système du 2nd ordre en Temps Continu en régime pseudo-périodique Pour =0 régime critique r : taux de décroissance : fréquence d ’oscillation

116
Réponse impulsionnelle d ’un système du 2nd ordre

117
Réponse fréquentielle d ’un système du 2nd ordre

118
VI.6 Systèmes non récursifs en Temps Discret - Filtres FIR
FIR (non récursif) Phase linéaire Complexité + grande pour les mêmes spécifications que IIR Compromis entre sélectivité du filtre et durée de la réponse impulsionnelle (nb. coeff ) IIR (récursif) Flexibilité Filtres IIR = connexion de système du 1er et 2nd ordre Implantation efficace et facile Ajustement des caractéristiques = réglage des paramètres Phase linéaire impossible Filtres non-récursifs de type Moyenne-Glissante (Moving Average Filter) n M -N
 Phase linéaire. Complexité + grande pour les mêmes spécifications que IIR. Compromis entre sélectivité du filtre et durée de la réponse impulsionnelle (nb. coeff ) IIR (récursif) Flexibilité Filtres IIR = connexion de système du 1er et 2nd ordre. Implantation efficace et facile. Ajustement des caractéristiques = réglage des paramètres. Phase linéaire impossible. Filtres non-récursifs de type Moyenne-Glissante (Moving Average Filter) n. M. -N.")
119
( lobe principal BP du filtre)
M+N+1 = 33 M+N+1 = 65 Longueur de la réponse impulsionnelle , largeur du lobe principal de la réponse fréquentielle ( lobe principal BP du filtre) Filtres non-récursifs - Forme générale Choix des bk , fonction des spécifications du filtre (ex: raideur de la transition BP BC...)
 Filtres non-récursifs - Forme générale. Choix des bk , fonction des spécifications du filtre (ex: raideur de la transition BP BC...)")
120
Comparaison entre les réponses fréquentielles d ’un filtre à moyenne glissante et un filtre de réponse impulsionnelle h[n] Réponse impulsionnelle d ’un filtre idéal de fréquence de coupure c= 2 /33 Réponse impulsionnelle Réelle et Paire Réponse fréquentielle Réelle et Paire (Phase nulle) Filtre causal décalage temporel de la réponse impulsionnelle Filtre à Phase Linéaire
![Comparaison entre les réponses fréquentielles d ’un filtre à moyenne glissante et un filtre de réponse impulsionnelle h[n]](http://slideplayer.fr/slide/513834/2/images/120/Comparaison+entre+les+r%C3%A9ponses+fr%C3%A9quentielles+d+%E2%80%99un+filtre+%C3%A0+moyenne+glissante+et+un+filtre+de+r%C3%A9ponse+impulsionnelle+h%5Bn%5D.jpg "Réponse impulsionnelle d ’un filtre idéal de fréquence de coupure c= 2 /33. Réponse impulsionnelle Réelle et Paire Réponse fréquentielle Réelle et Paire (Phase nulle) Filtre causal décalage temporel de la réponse impulsionnelle Filtre à Phase Linéaire.")
121
VII. Signaux Temps Continu: Transformée de Laplace
1 - Transformée de Laplace (TL) 2 - Transformée de Laplace et Transformée de Fourier 3 - Propriétés de la Transformée de Laplace 4 - Causalité et Stabilité des SLTI 5 - Evaluation géométrique de la Transformée de Fourier à partir de la représentation des Pôles et de Zéros de la TL 6 - Principales paires de Transformée de Laplace 7 - Réponse fréquentielle d’un SLTI régi par des équations différentielles linéaires à coefficients constants 8 - Transformée de Laplace inverse 9 - Transformée de Laplace Unilatérale (TLU)
 2 - Transformée de Laplace et Transformée de Fourier. 3 - Propriétés de la Transformée de Laplace. 4 - Causalité et Stabilité des SLTI. 5 - Evaluation géométrique de la Transformée de Fourier à partir de la représentation des Pôles et de Zéros de la TL. 6 - Principales paires de Transformée de Laplace. 7 - Réponse fréquentielle d’un SLTI régi par des équations différentielles linéaires à coefficients constants. 8 - Transformée de Laplace inverse. 9 - Transformée de Laplace Unilatérale (TLU)")
122
VII.1 Transformée de Laplace Fonction de transfert du système
A) Intérêt de la Transformée de Laplace - Une grande partie des signaux peuvent se représenter comme une combinaison d ’exponentielles complexes périodiques e st = e jt , fonctions propres des SLTI, MAIS PAS TOUS …. Transformée de Laplace = Généralisation de la Transformée de Fourier en Temps Continu avec s = + j - Permet l ’étude de la stabilité des systèmes et la résolution des équations différentielles à coefficients constants B) Définition de la Transformée de Laplace Bilatérale avec Rappel: Réponse d ’un SLTI de réponse impulsionnelle h(t) à un signal d ’entrée exponentiel complexe est avec Fonction de transfert du système
 Intérêt de la Transformée de Laplace. - Une grande partie des signaux peuvent se représenter comme une combinaison d ’exponentielles complexes périodiques e st = e jt , fonctions propres des SLTI, MAIS PAS TOUS …. Transformée de Laplace = Généralisation de la Transformée de Fourier en Temps Continu avec s = + j - Permet l ’étude de la stabilité des systèmes et la résolution des équations différentielles à coefficients constants. B) Définition de la Transformée de Laplace Bilatérale. avec. Rappel: Réponse d ’un SLTI de réponse impulsionnelle h(t) à un signal d ’entrée exponentiel complexe est. avec. Fonction de transfert du système.")
123
VII.2 Transformée de Laplace et Transformée de Fourier
Im Re Plan-s Quand: Transformée de Laplace = Transformée de Fourier de x(t) Remarque: Transformée de Laplace = Transformée de Fourier du signal x(t) multiplié par une exponentielle réelle = exponentielle réelle croissante ou décroissante dans le temps selon si est positif ou négatif
 Remarque: Transformée de Laplace = Transformée de Fourier du signal x(t) multiplié par une exponentielle réelle. = exponentielle réelle croissante ou décroissante dans le temps selon si est positif ou négatif.")
124
A) Exemple Transformée de Fourier: Transformée de Laplace:
Voir exerciece p 656 Région de convergence de la transformée de Laplace a>0 Im Im a<0 Plan-s Plan-s Re Re - a - a

125
B) Exemple Conclusion :
- La transformée de Fourier ne converge pas pour tous les signaux - La transformée de Laplace converge pour certaines valeurs de Re(s) [Re(s) >-a ] et pas pour d ’autres - Si a est négatif, X(s) ne peut être évalué en = 0, la TF de x(t) n ’existe pas alors que la TL existe - Si a est positif, X(s) peut être évalué en = 0, la TF et la TL de x(t) existent B) Exemple
 [Re(s) >-a ] et pas pour d ’autres. - Si a est négatif, X(s) ne peut être évalué en = 0, la TF de x(t) n ’existe pas alors que la TL existe. - Si a est positif, X(s) peut être évalué en = 0, la TF et la TL de x(t) existent. B) Exemple.")
126
Région de convergence de la transformée de Laplace
Im Re Plan-s - a Conclusion : - Transformées de Laplace identiques pour Exemples A et B, mais régions de convergence différentes La Région de Convergence de la Transformée de Laplace correspond aux valeurs de pour lesquelles la Transformée de Fourier de converge

127
VII.3 Propriétés de la Transformée de Laplace
Linéarité Décalage Changement d ’échelle Conjugaison si x(t) réel Si pôles et zéros complexes paires complexes conjuguées Convolution Dérivation
 réel. Si pôles et zéros complexes paires complexes conjuguées. Convolution. Dérivation.")
128
Propriétés de la transformée de Laplace

129
VII.4 Causalité et Stabilité des SLTI
Fonction de Transfert d ’un SLTI: avec Cas des fonctions de transfert H(s) rationnelles Généralement, H(s) peut s ’exprimer sous la forme d ’une fonction rationnelle, c ’est à dire sous la forme d ’un rapport de deux polynômes en s : Pôles et zéros réels ou paires complexes conjuguées Propriété 1 Pour un système est réel, donc causal, la fonction de transfert H(s) est telle que: Propriété 2 SLTI CAUSAL Région de Convergence de H(s) fonction rationnelle, = 1/2 plan droit, à droite du pôle le plus à droite
 rationnelles. Généralement, H(s) peut s ’exprimer sous la forme d ’une fonction rationnelle, c ’est à dire sous la forme d ’un rapport de deux polynômes en s : Pôles et zéros réels ou paires complexes conjuguées. Propriété 1. Pour un système est réel, donc causal, la fonction de transfert H(s) est telle que: Propriété 2. SLTI CAUSAL. Région de Convergence de H(s) fonction rationnelle, = 1/2 plan droit, à droite du pôle le plus à droite.")
130
Région de convergence de la transformée de Laplace de H(s)
Exemple: Région de convergence de la transformée de Laplace de H(s) Im Plan-s Re - 2 - 1 Propriété 3 Un SLTI CAUSAL possédant une fonction de transfert H(s) rationnelle est STABLE, si et seulement si tous les pôles de H(s) sont situés dans le demi-plan gauche [Re(s)<0] du plan de Laplace, axe imaginaire exclu
 Im. Plan-s. Re Propriété 3. Un SLTI CAUSAL possédant une fonction de transfert H(s) rationnelle est STABLE, si et seulement si tous les pôles de H(s) sont situés dans le demi-plan gauche [Re(s)<0] du plan de Laplace, axe imaginaire exclu.")
131
Exemples: SLTI CAUSAL SLTI CAUSAL Im Re Plan-s - 2 Im Re Plan-s 2 STABLE INSTABLE Propriété générale Un SLTI est STABLE si est seulement si l ’axe (j ) ( c ’est à dire Re(s) = 0) est inclus dans la Région de Convergence de sa fonction de transfert H(s) (quelconque)
 ( c ’est à dire Re(s) = 0) est inclus dans la Région de Convergence de sa fonction de transfert H(s) (quelconque)")
132
VII.5 Evaluation géométrique de la Transformée de Fourier
Diagramme des pôles et des zéros de H(s) représenté dans le plan-s permet d ’estimer graphiquement la réponse fréquentielle du système (quand elle existe) Exemple: Soit le nombre complexe : v = s + a Im Plan-s v = e i s = j = Réponse fréquentielle : Re - a
 représenté dans le plan-s permet d ’estimer graphiquement la réponse fréquentielle du système (quand elle existe) Exemple: Soit le nombre complexe : v = s + a. Im. Plan-s. v = e i s = j = Réponse fréquentielle : Re. - a.")
133
Cas général Le module de la réponse fréquentielle est égal au produit des longueurs des vecteurs reliant les zéros au point s = j de l ’axe imaginaire divisé par le produit des longueurs des vecteurs reliant les pôles à ce même point s La phase de la réponse fréquentielle est égale à la somme des arguments des vecteurs correspondant aux zéros moins la somme des arguments des vecteurs correspondant aux pôles Remarque: Un vecteur correspondant à un pôle situé près de l ’axe imaginaire aura une longueur faible et donc entraînera une valeur importante de la réponse fréquentielle (phénomène de résonance)
")
134
VII.6 Principales paires de Transformée de Laplace

135
Linéarité + dérivation:
VII.7 Réponse fréquentielle d’un SLTI régi par des équations différentielles linéaires à coefficients constants Propriété des SLTI: Linéarité + dérivation: Fonction de Transfert

136
lllllll Exemple 1: R L x(t) y(t) C + - A.N. R=1k C=1F L=0.01H
p1 = -9.9 E4 p2 = -0.1 E4 Système causal et Re(p1) et Re(p2) <0 Système STABLE R=10 C=100F L=0.1H p1 = 1 E2 * ( i) p2 = 1 E2 * ( i) Système causal et Re(p1) et Re(p2) <0 Système STABLE
 et Re(p2) <0 Système STABLE. R=10 C=100F L=0.1H. p1 = 1 E2 * ( i) p2 = 1 E2 * ( i) Système causal et Re(p1) et Re(p2) <0 Système STABLE.")
137
Exemple 2: On connaît l ’entrée d ’un SLTI initialement au repos: On connaît la sortie d ’un SLTI initialement au repos: : La fonction de transfert est: Le système est causal, Re(p1) et Re(p2)<0 donc le système est STABLE L ’équation différentielle régissant le système est:
 et Re(p2)<0 donc le système est STABLE. L ’équation différentielle régissant le système est:")
138
VII.8 Transformée de Laplace inverse
Utilisation d ’un contour d ’intégration dans le plan complexe... x(t) peut être représenté comme une intégrale pondérée d ’exponentielles complexes Généralement, la Transformée de Laplace inverse sera déterminée à partir des tables, après une décomposition en fractions partielles de X(s)
 peut être représenté comme une intégrale pondérée d ’exponentielles complexes. Généralement, la Transformée de Laplace inverse sera déterminée à partir des tables, après une décomposition en fractions partielles de X(s)")
139
VII.9 Transformée de Laplace Unilatérale (TLU) Propriété importante:
Définition TLU utilisée pour l ’étude des systèmes causaux spécifiés généralement par des équations différentielles à coefficients constants avec des conditions initiales non nulles Système IAR, SLTI ... Si x(t) = 0 pour t<0 TL {x(t)} = TLU {x(t)} Région de Convergence de TLU toujours = 1/2 plan de droite (à droite du pôle le + à droite si rationnelle) Propriété importante: Intérêt: Possibilité de tenir compte de conditions initiales non nulles (système non IAR)
 = 0 pour t<0 TL {x(t)} = TLU {x(t)} Région de Convergence de TLU toujours = 1/2 plan de droite (à droite du pôle le + à droite si rationnelle) Propriété importante: Intérêt: Possibilité de tenir compte de conditions initiales non nulles (système non IAR)")
140
VIII. Signaux Temps Discrets : Transformée en Z
1 - Transformée en Z (TZ) 2 - Transformée en Z et Transformée de Fourier 3 - Propriétés de la TZ 4 - Causalité et Stabilité des SLTI 5 - Evaluation géométrique de la transformée de Fourier à partir de la représentation des Pôles et de Zéros de la TZ 6 - Principales paires de Transformée en Z 7 - Réponse fréquentielle d’un SLTI régi par des équations aux différences linéaires à coefficients constants 8 - Représentation en diagramme bloc de SLTI causaux décrits par des équations aux différences à coefficients constants 9 - Transformée en Z inverse 10 - Transformée en Z Unilatérale (TZU)
 2 - Transformée en Z et Transformée de Fourier. 3 - Propriétés de la TZ. 4 - Causalité et Stabilité des SLTI. 5 - Evaluation géométrique de la transformée de Fourier à partir de la représentation des Pôles et de Zéros de la TZ. 6 - Principales paires de Transformée en Z. 7 - Réponse fréquentielle d’un SLTI régi par des équations aux différences linéaires à coefficients constants. 8 - Représentation en diagramme bloc de SLTI causaux décrits par des équations aux différences à coefficients constants. 9 - Transformée en Z inverse Transformée en Z Unilatérale (TZU)")
141
Fonction de transfert du système
VIII.1 Transformée en Z A) Intérêt de la Transformée en Z - Transformée en Z pour les signaux TD Transformée de Laplace pour les signaux TC - TZ peut être appliquée à une + grande classe de signaux que la TF TD Transformée en Z = Généralisation de la Transformée de Fourier en Temps Continu avec - Permet l ’étude de la stabilité des systèmes et la résolution des équations aux différences à coefficients constants B) Définition de la Transformée en Z avec Rappel: Réponse d ’un SLTI de réponse impulsionnelle h[n] à un signal d ’entrée exponentiel complexe zn avec Fonction de transfert du système
 Intérêt de la Transformée en Z. - Transformée en Z pour les signaux TD Transformée de Laplace pour les signaux TC. - TZ peut être appliquée à une + grande classe de signaux que la TF TD. Transformée en Z = Généralisation de la Transformée de Fourier en Temps Continu avec. - Permet l ’étude de la stabilité des systèmes et la résolution des équations aux différences à coefficients constants. B) Définition de la Transformée en Z. avec. Rappel: Réponse d ’un SLTI de réponse impulsionnelle h[n] à un signal d ’entrée exponentiel complexe zn. avec. Fonction de transfert du système.")
142
VIII.2 Transformée en Z et Transformée de Fourier
Re Im 1 Plan-z Quand: c ’est à dire Transformée en Z = Transformée de Fourier de x[n] Remarque: Transformée en Z = Transformée de Fourier du signal x[n] multiplié par une exponentielle réelle = exponentielle réelle croissante ou décroissante avec n selon si r >1 ou r<1

143
A) Exemple Converge si Transformée en z:
Région de convergence de la transformée en Z Re Im 1 Plan-z a Re Im 1 Plan-z a Voir exerciece p 656 La région de convergence contient le cercle unité, TF{x[n]} converge La région de convergence ne contient pas le cercle unité, TF{x[n]} ne converge pas

144
La région de convergence contient le cercle unité, TF{x[n]} converge
Conclusion : - La transformée de Fourier ne converge pas pour tous les signaux - La transformée en Z converge pour certaines valeurs de z , |z| >a et pas pour d ’autres - Si a >1, X(z) ne peut être évalué en z = ej, la TF de x[n] n ’existe pas alors que la TZ existe - Si a <1, X(z) peut être évalué en z = ej, la TF et la TZ de x[n] existent B) Exemple Converge si Re Im 1 Plan-z a Im Re 1 Plan-z a La région de convergence ne contient pas le cercle unité,TF{x[n]} ne converge pas La région de convergence contient le cercle unité, TF{x[n]} converge
![La région de convergence contient le cercle unité, TF{x[n]} converge](http://slideplayer.fr/slide/513834/2/images/144/La+r%C3%A9gion+de+convergence+contient+le+cercle+unit%C3%A9%2C+TF%7Bx%5Bn%5D%7D+converge.jpg "Conclusion : - La transformée de Fourier ne converge pas pour tous les signaux. - La transformée en Z converge pour certaines valeurs de z , |z| >a et pas pour d ’autres. - Si a >1, X(z) ne peut être évalué en z = ej, la TF de x[n] n ’existe pas alors que la TZ existe. - Si a <1, X(z) peut être évalué en z = ej, la TF et la TZ de x[n] existent. B) Exemple. Converge si. Re. Im. 1. Plan-z. a. Im. Re. 1. Plan-z. a. La région de convergence ne contient pas le cercle unité,TF{x[n]} ne converge pas. La région de convergence contient le cercle unité, TF{x[n]} converge.")
145
pour lesquelles la Transformée de Fourier de converge
Conclusion : - Transformées en Z identiques (même zéro et même pôle) pour Exemples A et B, mais régions de convergence différentes La Région de Convergence de la Transformée en Z correspond aux valeurs de pour lesquelles la Transformée de Fourier de converge La Région de Convergence de la Transformée en Z consiste en une couronne dans le plan-z centré sur l’origine r1 < |z| < r2 Im r2 Plan-z Cas particuliers: r1=0 ou r2 = r1 Re
 pour Exemples A et B, mais régions de convergence différentes. La Région de Convergence de la Transformée en Z correspond aux valeurs de. pour lesquelles la Transformée de Fourier de. converge La Région de Convergence de la Transformée en Z consiste en une couronne dans le plan-z centré sur l’origine r1 < |z| < r2. Im. r2. Plan-z. Cas particuliers: r1=0 ou r2 = r1. Re.")
146
VIII.3 Propriétés de la Transformée en Z Opérateur retard unité
Linéarité Décalage temporel z-1 Opérateur retard unité Im Re C1 0 Changement d ’échelle dans Z Inversion temporelle Conjugaison si x[n] réel pôle (ou zéro) en z=z0 pôle (ou zéro) en z = z*0 Convolution Dérivation dans Z
 en z=z0 pôle (ou zéro) en z = z*0. Convolution. Dérivation dans Z.")
148
VIII.4 Causalité et Stabilité des SLTI
Fonction de Transfert d ’un SLTI: avec Cas des fonctions de transfert H(z) rationnelles Généralement, H(z) peut s ’exprimer sous la forme d ’une fonction rationnelle, c ’est à dire sous la forme d ’un rapport de deux polynômes en z : Pôles et zéros réels ou paires complexes conjuguées Propriété 1 1) SLTI CAUSAL 2) Région de Convergence de H(z) fonction rationnelle = Région strictement extérieure au cercle associé au pôle le plus éloigné du centre
 rationnelles. Généralement, H(z) peut s ’exprimer sous la forme d ’une fonction rationnelle, c ’est à dire sous la forme d ’un rapport de deux polynômes en z : Pôles et zéros réels ou paires complexes conjuguées. Propriété 1. 1) SLTI CAUSAL. 2) Région de Convergence de H(z) fonction rationnelle = Région strictement extérieure au cercle associé au pôle le plus éloigné du centre.")
149
Propriété 2 Exemple 1: SLTI non causal, M>N
1) RC à l ’extérieur du pôle le + éloigné 2) M=N Donc le système est causal Exemple 2: Vérification: calcul de la réponse impulsionnelle en utilisant les tables: Propriété 2 Un SLTI CAUSAL possédant une fonction de transfert H(z) rationnelle est STABLE, si et seulement si tous les pôles de H(z) sont situés à l’intérieur strictement du cercle unité du plan Z c ’est à dire | pi |< 1 i
 RC à l ’extérieur du pôle le + éloigné. 2) M=N. Donc le système est causal. Exemple 2: Vérification: calcul de la réponse impulsionnelle en utilisant les tables: Propriété 2. Un SLTI CAUSAL possédant une fonction de transfert H(z) rationnelle est STABLE, si et seulement si tous les pôles de H(z) sont situés à l’intérieur strictement du cercle unité du plan Z c ’est à dire | pi |< 1 i.")
150
Exemples: STABLE INSTABLE Propriété générale
Hypothèse SLTI CAUSAL Hypothèse SLTI CAUSAL Im Re Im 1 Plan-z r Plan-z r 1 Re STABLE INSTABLE Propriété générale Un SLTI est STABLE si est seulement si le cercle unité |z| =1 est inclus dans la Région de Convergence de sa fonction de transfert H(z) (quelconque)
 (quelconque)")
151
VIII.5 Evaluation géométrique de la Transformée de Fourier
Diagramme des pôles et des zéros de H(z) représenté dans le plan-z permet d ’estimer graphiquement la réponse fréquentielle du système (quand elle existe) Exemple: Im Plan-z Soit les vecteurs : v2 = z - a C1 v1 = z = e j v1 v2 Réponse fréquentielle : w a 1 Re
 représenté dans le plan-z permet d ’estimer graphiquement la réponse fréquentielle du système (quand elle existe) Exemple: Im. Plan-z. Soit les vecteurs : v2 = z - a. C1. v1 = z = e j v1. v2. Réponse fréquentielle : w. a. 1. Re.")
152
Cas général Le module de la réponse fréquentielle est égal au produit des modules des vecteurs reliant les zéros au point z =e j du cercle unité divisé par le produit des modules des vecteurs reliant les pôles à ce même point z La phase de la réponse fréquentielle est égale à la somme des arguments des vecteurs correspondant aux zéros moins la somme des arguments des vecteurs correspondant aux pôles Un vecteur correspondant à un pôle situé près du cercle unité aura un module faible et donc entraînera une valeur importante de la réponse fréquentielle (phénomène de résonance)
")
153
VIII.6 Principales paires de Transformée en Z

154
Linéarité + décalage temporel:
VIII.7 Réponse fréquentielle d’un SLTI régi par des équations aux différences linéaires à coefficients constants Propriété des SLTI: Linéarité + décalage temporel: Fonction de Transfert

155
Table + linéarité+ décalage temporel
Déterminer la réponse impulsionnelle du SLTI causal caractérisé par l ’équation suivante: Exemple : Re Im 1 Plan-z Pôle en zp = 1/2, Zéro en zz = -1/3 Table + linéarité+ décalage temporel |zp| < 1 SLTI STABLE

156
Utilisation de l ’opérateur retard
VIII.8 Représentation en diagramme bloc de SLTI causaux décrits par des équations aux différences à coefficients constants Utilisation de l ’opérateur retard z-1 Forme directe, forme cascade et forme parallèle Exemple 1: SLTI du 1er ordre Trouver l ’équation aux différences caractérisant le SLTI causal et donner le diagramme bloc du système: + z-1 1/4 x[n] y[n]

157
Exemple 2: Trouver l ’équation aux différences caractérisant le SLTI causal et 3 diagrammes-bloc possibles du système: 1) Forme directe 2) Forme cascade 3) Forme parallèle
 Forme directe. 2) Forme cascade. 3) Forme parallèle.")
158
VIII.9 Transformée en Z inverse
Théorème des Résidus Utilisation d ’un contour d ’intégration dans le plan complexe... Généralement, la Transformée en Z inverse sera déterminée à partir des tables, après une décomposition en fractions partielles de X(z)
")
159
VIII.10 Transformée en Z Unilatérale (TZU) Propriété importante:
Définition TZU utilisée pour l ’étude des systèmes causaux spécifiés généralement par des équations aux différences à coefficients constants avec des conditions initiales non nulles SLTI IAR ... Si x[n] = 0 pour n<0 TZ {x[n]} = TZU {x[n])} Région de Convergence de TZU toujours extérieure à un cercle (correspt au pôle le + éloigné si rationnelle) Propriété importante: Intérêt: Possibilité de tenir compte de conditions initiales non nulles (système non IAR)
} Région de Convergence de TZU toujours extérieure à un cercle (correspt au pôle le + éloigné si rationnelle) Propriété importante: Intérêt: Possibilité de tenir compte de conditions initiales non nulles (système non IAR)")
160
IX. Echantillonnage 1 - Représentation d ’un signal Temps Continu par ses échantillons - Théorème de l ’échantillonnage 2 - Reconstruction d ’un signal à partir de ses échantillons en utilisant l ’interpolation 3 - Effet du sous-échantillonnage: « Repliement de spectre » ou « aliasing » 4 - Echantillonnage de signaux Temps Discret (décimation-interpolation)
")
161
IX.1 Représentation d ’un signal Temps Continu par ses échantillons - Théorème de l ’échantillonnage
Sous certaines conditions, un signal Temps Continu peut être reconstitué parfaitement en ne connaissant ses valeurs qu’ en certains points espacés régulièrement dans le temps (échantillons): Théorème de l ’échantillonnage Représentation d ’un signal TC par ses échantillons En général, une séquence d ’échantillons, ne peut définir de manière unique un signal TC Nécessité de prendre en compte des contraintes supplémentaires: - largeur de bande du signal - période d ’échantillonnage
: Théorème de l ’échantillonnage. Représentation d ’un signal TC par ses échantillons. En général, une séquence d ’échantillons, ne peut définir de manière unique un signal TC. Nécessité de prendre en compte des contraintes supplémentaires: - largeur de bande du signal. - période d ’échantillonnage.")
162
Opération d ’échantillonnage
x e (t) x e (t) Produit en Temps Convolution en Fréquence Or Spectre périodique, superposition des répliques de X(j) décalées tous les s et pondérées par 1/T Donc
 x e (t) Produit en Temps Convolution en Fréquence. Or. Spectre périodique, superposition des répliques de X(j) décalées tous les s et pondérées par 1/T. Donc.")
163
x(t) peut être parfaitement reconstitué à partir de xe(t)
Exemple 1 Xe(j) Xe(j) Si Recouvrement Si Pas de recouvrement x(t) peut être parfaitement reconstitué à partir de xe(t) au moyen d ’un filtre passe-bas de gain T de fréquence de coupure supérieure à M et inférieure à s -M
 Xe(j) Si. Recouvrement. Si. Pas de recouvrement. x(t) peut être parfaitement reconstitué à partir de xe(t) au moyen d ’un filtre passe-bas de gain T de fréquence de coupure supérieure à M et inférieure à s -M.")
164
( Théorème de Shannon ou Théorème de Nyquist)
Théorème de l ’échantillonnage ( Théorème de Shannon ou Théorème de Nyquist) Soit x(t) un signal de bande limitée telle que: Alors x(t) est déterminé de manière unique par ses échantillons x(nT), n=0, 1, 2, … si: où A partir de ces échantillons, il est possible de reconstruire x(t) en générant un train d ’impulsions dont les impulsions successives ont pour amplitude la valeur des échantillons. Ce train d ’impulsions est alors filtré par un filtre passe-bas idéal de gain T et de fréquence de coupure supérieure à M et inférieure à s -M . Le signal résultant sera alors exactement égal à x(t)
 Soit x(t) un signal de bande limitée telle que: Alors x(t) est déterminé de manière unique par ses échantillons x(nT), n=0, 1, 2, … si: où. A partir de ces échantillons, il est possible de reconstruire x(t) en générant un train d ’impulsions dont les impulsions successives ont pour amplitude la valeur des échantillons. Ce train d ’impulsions est alors filtré par un filtre passe-bas idéal de gain T et de fréquence de coupure supérieure à M et inférieure à s -M . Le signal résultant sera alors exactement égal à x(t)")
165
Système d ’échantillonnage et de reconstruction
Exemple 2 Reconstruction d ’un signal TC à partir de ses échantillons en utilisant un filtre passe-bas idéal Xe(j) Système d ’échantillonnage et de reconstruction x e (t) Spectre de x(t) Xe(j) Spectre de xe(t) Filtre Passe-Bas idéal pour reconstruire X(j) à partir de Xe(j) Spectre de xr(t)
 Système d ’échantillonnage et de reconstruction. x e (t) Spectre de x(t) Xe(j) Spectre de xe(t) Filtre Passe-Bas idéal pour reconstruire X(j) à partir de Xe(j) Spectre de xr(t)")
166
IX.2 Reconstruction d’un signal à partir de ses échantillons en utilisant l’ interpolation
Interpolation: Ajustement d ’un signal continu à un ensemble d ’échantillons pour reconstruire une fonction soit de manière approximative, soit de manière exacte Interpolation linéaire t Interpolation: Effet du filtre passe-bas dans le domaine temporel 1) Interpolation exact Réponse impulsionnelle d ’un filtre idéal : (gain de T) Formule d ’interpolation exacte :
 Interpolation exact. Réponse impulsionnelle d ’un filtre idéal : (gain de T) Formule d ’interpolation exacte :")
167
2) Interpolation avec un bloqueur d ’ordre 0
Interpolation exacte basée sur le sinus cardinal x e (t) 2) Interpolation avec un bloqueur d ’ordre 0 x e (t) x e (t)
 2) Interpolation avec un bloqueur d ’ordre 0. x e (t) x e (t)")
168
3) Interpolation avec un bloqueur d ’ordre 1 : interpolation linéaire
x e (t) x e (t)
 x e (t)")
169
IX.3 Effet du sous-échantillonnage: Aliasing
X(j) ne peut pas être restitué par filtrage passe-bas ALIASING Le signal reconstruit xr(t) n ’est plus égal à x(t) 1) Effet de l ’aliasing sur un signal sinusoïdal Sous-échantillonnage correct ALIASING
 ne peut pas être restitué par filtrage passe-bas ALIASING. Le signal reconstruit xr(t) n ’est plus égal à x(t) 1) Effet de l ’aliasing sur un signal sinusoïdal. Sous-échantillonnage correct. ALIASING.")
170
2) Effet de l ’aliasing dans le domaine fréquentiel
 Effet de l ’aliasing dans le domaine fréquentiel")
171
IX.4 Echantillonnage de signaux Temps Discret
1) Echantillonnage d ’un signal discret x Xe(e j) x e [n] Spectre périodique, superposition des répliques de X(e j) décalées tous les s et pondérées par 1/T Xe(e j)
 Echantillonnage d ’un signal discret. x. Xe(e j) x e [n] Spectre périodique, superposition des répliques de X(e j) décalées tous les s et pondérées par 1/T. Xe(e j)")
172
Restitution exact d ’un signal temps discret à partir de ses échantillons
H(e j)
")
173
2) Décimation ou sous-échantillonnage
xe [n] est nul entre les instants d ’échantillonnage séquence inefficace pour la transmission ou le stockage Solution: créer une nouvelle séquence xd [n] identique à xe [n] aux instants d ’échantillonnage Décimation Relation entre x[n], xe [n] échantillonnage et xd [n] décimation ou sous-échantillonnage x e [n] x d [n]

174
Relation entre échantillonnage et décimation
Remarque: Si x[n] obtenu par échantillonnage d ’un signal continu, la décimation peut être interprétée comme une réduction du taux d ’échantillonnage par un facteur de N

175
3) Sur-échantillonnage ou interpolation
Opération inverse de la décimation: introduire N-1 points d ’amplitude 0 entre chaque valeur de la séquence initiale obtenir une séquence à un taux d ’échantillonnage plus élevé xu[n] xd[n] La séquence interpolée x[n] est obtenue par filtrage passe-bas de xu[n]

176
4) Exemple Combinaison du sur-échantillonnage et de la décimation - Sous-échantillonnage maximum
 Exemple Combinaison du sur-échantillonnage et de la décimation - Sous-échantillonnage maximum")
177
Propriétés des Séries de Fourier Temps Continu

178
Propriétés des Séries de Fourier Temps Discret

179
Principales paires de la Transformée de Fourier Temps Continu

180
Propriétés de la Transformée de Fourier Temps Continu

181
Principales paires de la Transformée de Fourier Temps Discret

182
Propriétés de la Transformée de Fourier Temps Discret

183
Propriétés de la transformée de Laplace

184
Principales paires de Transformée de Laplace

185
Propriétés de la transformée en Z

186
Principales paires de Transformée en Z

Présentations similaires

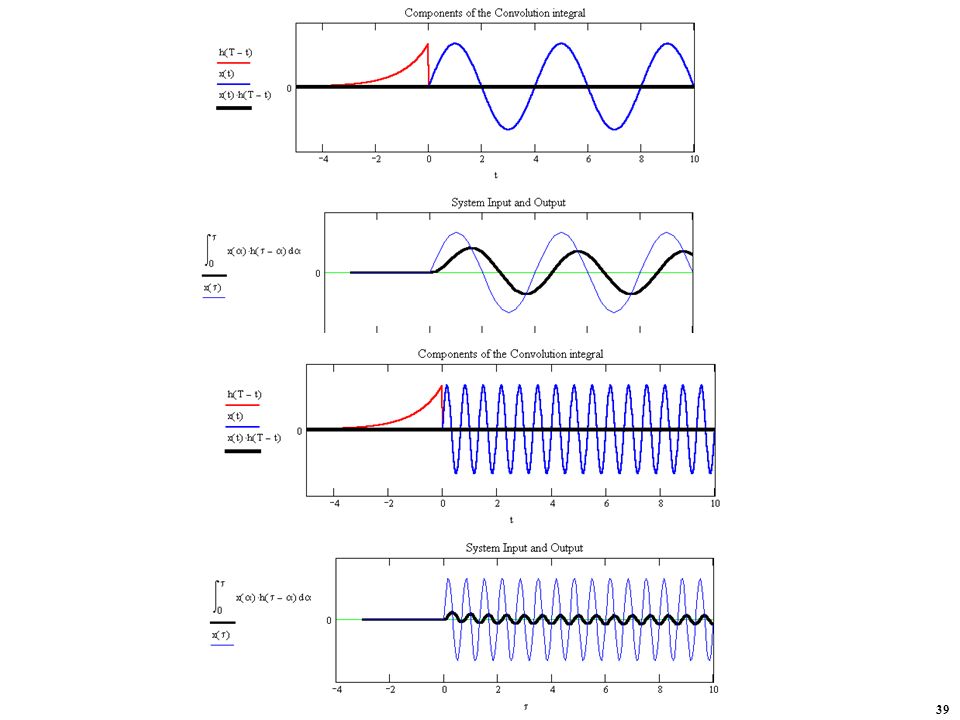
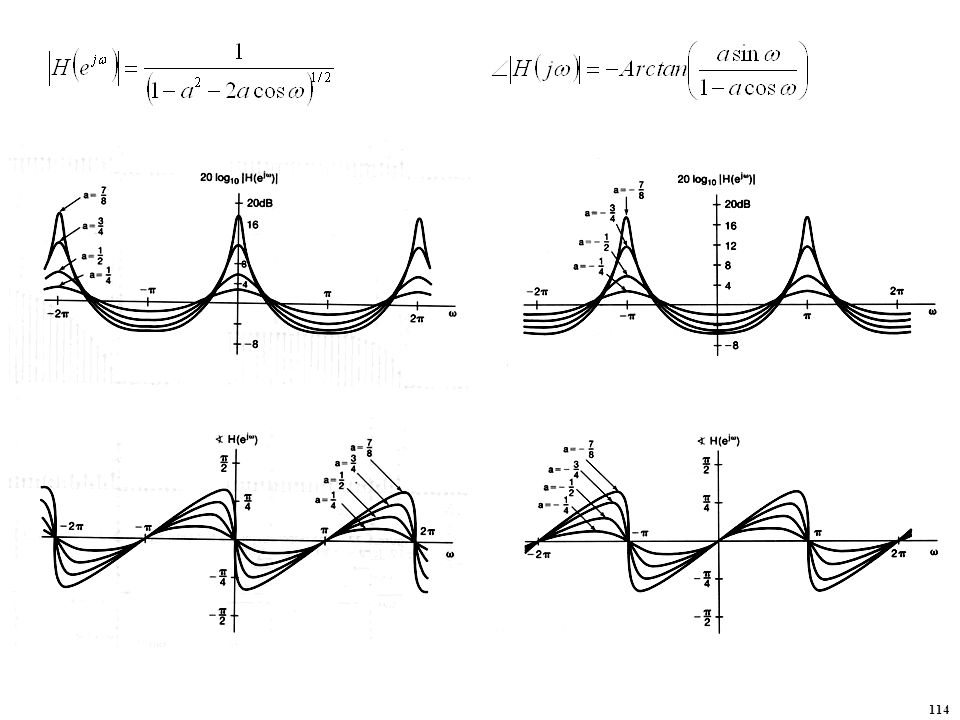










 signal.>")








 de puissance finie peut être décomposé en une somme de sinus et de cosinus. An=0 1(4/) 1+ 3 (4/3) 1+ 3+5.>")
