Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Chapitre 1 Concepts de base des O.S. 1.1. Qu'est-ce un O.S. ?
1.2. Histoire des O.S. 1.3. La jungle des O.S. 1.4. Composantes des O.S. 1.5. Les appels-systèmes

2
1.1. Qu'est-ce qu'un O.S. ? C'est la couche logicielle indispensable entre le hardware et les programmes applicatifs C'est une machine étendue Présentation à l'utilisateur d'une machine virtuelle Masquage de la complexité technique C'est un gestionnaire de ressources Allocation équitable du temps (CPU) et de l'espace (mémoire) entre les différents processus Allocation équitable des autres ressources périphériques
 et de l espace (mémoire) entre les différents processus. Allocation équitable des autres ressources périphériques.")
3
L’O.S. est plus qu’une interface
Beaucoup d’utilisateurs ne voient que l’interface (shell) Intégration de plus en plus forte actuellement entre les services (cfr Windows/Internet) Hardware Operating System Libraries Utilities Interface
 Intégration de plus en plus forte actuellement entre les services (cfr Windows/Internet) Hardware. Operating System. Libraries. Utilities. Interface.")
4
Objectifs de l’O.S. Utilisation efficace des ressources
Eviter les bouchons (bottlenecks) et les temps d’attente Partage “optimal” du CPU, mémoire, I/O Facilité d’utilisation Le client est roi Disponibilité, fiabilité, sécurité les systèmes informatiques sont le cerveau de nombreuses entreprises A failed system can mean a failed company...
 et les temps d’attente. Partage optimal du CPU, mémoire, I/O. Facilité d’utilisation. Le client est roi. Disponibilité, fiabilité, sécurité. les systèmes informatiques sont le cerveau de nombreuses entreprises. A failed system can mean a failed company...")
5
Vue abstraite d'un système informatique
Un système informatique est composé de: hardware programmes systèmes programmes d'applications

6
1.2. Historique des OS

7
Première génération OS 1945 - 1955
Systèmes batch (par lots) simples Mono-tâche et séquentiel (héritier: DOS) Compute Read Print Compute Read Print Gaspillage d ’utilisation CPU !
 simples. Mono-tâche et séquentiel (héritier: DOS) Compute. Read. Print. Compute. Read. Print. Gaspillage d ’utilisation CPU !")
8
Seconde génération OS 1955 - 1965
Systèmes batch avec spooling (Simultaneous Peripheral Operations On-Line) lecture et écriture Mieux, mais problème des longs jobs Compute Read Print Compute Read Print Compute Read Print
 lecture et écriture. Mieux, mais problème des longs jobs. Compute. Read. Print. Compute. Read. Print. Compute. Read. Print.")
9
Troisième génération OS 1965–1980
Introduction des concepts de temps partagé et d’interactivité avec les utilisateurs (premiers terminaux texte tty) systèmes multi-tâches, multi-utilisateurs Nécessité d’un ordonnanceur et de gestion de processus (priorités, tranches de temps) Les premiers O.S. modernes, propriétaires (IBM, Dec,…) ou de domaine public (Unix) Vers une gestion moins gaspilleuse des ressources 4.Timesharing systems -- early systems were add ons to batch. in some cases ran as batch jobs (limited resource management) poor performance (65\% was good) (CPU time/interaction very small) little ability for users to share programs or data Relate performance to percentage using analogy of a highway. 100km of cars go by in an hour theoretically 20,000 5m cars 1800 cars if following at 10 car lengths = 9%
 systèmes multi-tâches, multi-utilisateurs. Nécessité d’un ordonnanceur et de gestion de processus (priorités, tranches de temps) Les premiers O.S. modernes, propriétaires (IBM, Dec,…) ou de domaine public (Unix) Vers une gestion moins gaspilleuse des ressources. 4.Timesharing systems -- early systems were add ons to batch. in some cases ran as batch jobs. (limited resource management) poor performance (65\% was good) (CPU time/interaction very small) little ability for users to share programs or data. Relate performance to percentage using analogy of a highway. 100km of cars go by in an hour. theoretically 20,000 5m cars cars if following at 10 car lengths = 9%")
10
Base de la multiprogrammation
Plusieurs jobs sont résidents en mémoire. Nécessité d’un ordonnanceur pour sélectionner le job suivant devant s’exécuter

11
Quatrième génération 1980 – ...
Les premiers PCs: retour en arrière au niveau des O.S. (mono-tâche, mono-user)! Les premiers réseaux: intégration des protocoles de communication dans les O.S. L’avènement réel de l’informatique moderne Internet a 30 ans! Unix aussi! C également! 6. Personal Computers and Workstations redesign opportunity, simplification single user (single/multiple task) protection -- system from user, v. errors Most were over simplified -- rush to get into production old processor architecture single task dubious protection Now seeing sophisticated systems such as Sun, HP UNIX workstations, Windows NT.
! Les premiers réseaux: intégration des protocoles de communication dans les O.S. L’avènement réel de l’informatique moderne. Internet a 30 ans! Unix aussi! C également! 6. Personal Computers and Workstations. redesign opportunity, simplification. single user (single/multiple task) protection -- system from user, v. errors. Most were over simplified -- rush to get into production. old processor architecture. single task. dubious protection. Now seeing sophisticated systems such as Sun, HP UNIX workstations, Windows NT.")
12
Quatrième génération 1980 – ...
“The system is the network.” (Sun Microsystems) Multi-utilisateurs, Multi-tâches, Multi-processeurs, Multi-ordinateurs (systèmes distribués) 7.Network or Distributed Systems Communication Shared programs/data Single file system Universal interfaces Increased complexity How many operating systems can the class name - contest in groups.
 Multi-utilisateurs, Multi-tâches, Multi-processeurs, Multi-ordinateurs (systèmes distribués) 7.Network or Distributed Systems. Communication. Shared programs/data. Single file system. Universal interfaces. Increased complexity. How many operating systems can the class name - contest in groups.")
13
Résumé de l’histoire de l’informatique

14
1.3. La jungle des O.S. Mainframe operating systems
Server operating systems Multiprocessor operating systems Personal computer operating systems Real-time operating systems (O.S. temps-réel) Embedded operating systems (O.S. embarqués) Smart card operating systems (O.S. pour cartes à puces)
 Embedded operating systems (O.S. embarqués) Smart card operating systems (O.S. pour cartes à puces)")
15
Systèmes parallèles Plusieurs CPU coopérant en topologie rapprochée (cartes multiprocesseurs, clusters) À mémoire partagée, distribuée, ou distribuée et virtuellement partagée. Pourquoi ? Coût/Performance Fiabilité/Tolérance aux pannes/Qualité de Service Sécurité

16
Systèmes distribués L’application est répartie sur plusieurs ordinateurs (loosely coupled). Avantages Partage de ressources Adaptation application/architecture Nouveau concept : Cluster & Grid computing (voir

17
Systèmes temps-réel Contraintes de temps strictes
Souvent utilisés pour des applications dédicacées de contrôle (industrie, domaine médical, scientifique,…) Hard real-time system Nécessite un O.S. + hardware adapté Soft real-time system Nécessite un paramètrage de l’O.S. (ordonnanceur spécialisé)
 Hard real-time system. Nécessite un O.S. + hardware adapté. Soft real-time system. Nécessite un paramètrage de l’O.S. (ordonnanceur spécialisé)")
18
Systèmes mobiles (embarqués ou spécialisés)
de l'informatique dans toutes les machines: cartes à puce, machines à laver, notebook, agenda électroniques, GSM,... nécessité d'un O.S. standard, miniature et adapté pour les programmer : Windows CE, adaptation de Linux, PalmOS,...

19
1.4. Composantes des O.S. Gestion des processus Gestion de la mémoire
Gestion des fichiers Gestion des I/O et périphériques Administration et sécurité Réseau Services utilisateurs (interface, audit, monitoring…)
")
20
Gestion des processus Un processus est un programme en cours d’exécution Il occupe des ressources (mémoire, fichiers ouverts, CPU,..) Il a un contexte d’exécution (état) Les fonctions indispensables sont: Création et terminaison Allocation des ressources Synchronisation et communication Administration Processes and threads are the principal components of work, i.e. a thread executes. A process consists of memory, open files and a current state (program counter, registers, etc.) A process consists of several threads that share the memory files, etc., but have their own execution state. General functions are create/delete or allocate/deallocate processes/threads suspend/resume thread support synchronisation and ipc manage
 Les fonctions indispensables sont: Création et terminaison. Allocation des ressources. Synchronisation et communication. Administration. Processes and threads are the principal components of work, i.e. a thread executes. A process consists of memory, open. files and a current state (program counter, registers, etc.) A process consists of several threads that share the memory files, etc., but have their own execution state. General functions are. create/delete or allocate/deallocate processes/threads. suspend/resume thread. support synchronisation and ipc. manage.")
21
Gestion de la mémoire Partage équitable de la mémoire entre processus
Gestion d’une mémoire virtuelle (swap) Protection des accès Récupération des blocs devenus libres (garbage collection) The problems here can vary substantially from a small PC to a larger system (virtual memory v. none) and hardware support. A major function of modern memory systems is to delay binding of addresses as long as possible. manage memory - in use, free, clean/dirty allocate memory to processes While memory has become much cheaper and more plentiful the speed gap between primary and secondary has also increased.
 Protection des accès. Récupération des blocs devenus libres (garbage collection) The problems here can vary substantially from a small PC to a larger system (virtual memory v. none) and hardware. support. A major function of modern memory systems is to delay binding of addresses as long as possible. manage memory - in use, free, clean/dirty. allocate memory to processes. While memory has become much cheaper and more plentiful the speed gap between primary and secondary has also. increased.")
22
Gestion de la mémoire secondaire
L'O.S. doit gérer efficacement: L'allocation/désallocation de l'espace disque Les accès (lents) aux disques Les transferts mémoire-vive/mémoire secondaire
 aux disques. Les transferts mémoire-vive/mémoire secondaire.")
23
create, delete, open, close
Gestion des fichiers Administration des fichiers Création/effacement/copiage fichiers/répertoires Modification des propriétés d’un fichier Correspondance fichier/stockage physique Backup et archivage create, delete, open, close read, write, seek get or set attributes To users this is very important. As we'll see different systems give quite different capabilities. create/delete files/directories manipulate file/directory attributes mapping to storage backup and archiving Increasingly systems are concerned with resilency to disk crashes and maintaining the consistency of multiple copies of files. A minimal set of operations - create, delete, open, close, read, write, seek, and get or set attributes. The same sort of thing for I/O devices, memory allocation, information services, etc.

24
L'arbre des fichiers .

25
L'arbre des fichiers Before mounting,
Les fichiers sur "Floppy" sont inacessibles After mounting floppy on b, Les fichiers sur "floppy" font partie de l'arbre des fichiers

26
Gestion des I/O Assurer un niveau d’abstraction: cacher les particularités des systèmes Composantes principales Gestion de buffering, caching et spooling Drivers

27
Administration et sécurité
Gestion des comptes utilisateurs quotas, compatibilité, droits d’accès Audit du système Démarrage (boot) et redémarrage en cas de panne Lutte contre le piratage Les fonctions réseaux jouent un rôle majeur aujourd’hui (accès distants au CPU et aux périphériques) Really needs to be integrated with all other subsystems, but has some functions of its own: authentication encryption Granularity of both the object protected and the type of protection has important implications.
 et redémarrage en cas de panne. Lutte contre le piratage. Les fonctions réseaux jouent un rôle majeur aujourd’hui (accès distants au CPU et aux périphériques) Really needs to be integrated with all other subsystems, but has some functions of its own: authentication. encryption. Granularity of both the object protected and the type of protection has important implications.")
28
Administration réseau
Lié de plus en plus à l’O.S. 4 types de systèmes Stand alone (en voie d'extinction) Multiprocesseurs Clusters (LAN) Distribué (WAN) 2 modèles de communication Par passage de message Mémoire (virtuellement) partagée Networking is increasingly a part of the system, e.g. inter-machine ipc is transparent. We can look at (at least) four different types of systems: stand alone multi-processor -- shared clock, uniform access memory networked -- no shared clock, NUMA distributed Two communication models -- messaging passing and shared memory.
 Multiprocesseurs. Clusters (LAN) Distribué (WAN) 2 modèles de communication. Par passage de message. Mémoire (virtuellement) partagée. Networking is increasingly a part of the system, e.g. inter-machine ipc is transparent. We can look at (at least) four. different types of systems: stand alone. multi-processor -- shared clock, uniform access memory. networked -- no shared clock, NUMA. distributed. Two communication models -- messaging passing and shared memory.")
29
Services utilisateurs
Interface (conviviale) Shell GUI (Graphic User Interface) Scripting (langages de commande) Comptabilité, administration Sécurité, Audit L’utilisateur veut un O.S. simple d'emploi, efficace, fiable (cfr évolution de l’automobile)
 Shell. GUI (Graphic User Interface) Scripting (langages de commande) Comptabilité, administration. Sécurité, Audit. L’utilisateur veut un O.S. simple d emploi, efficace, fiable (cfr évolution de l’automobile)")
30
Structure d’O.S. type - UNIX
USERS shells and commands compilers and interpreters system libraries signals terminal handling character I/O system terminal drivers file system swapping block I/O system disk and tape drivers CPU scheduling page replacement demand paging virtual memory system call interface to kernel kernel interface to the hardware interface N O Y A U terminal controllers terminals device controllers disks and tapes memory controllers physical memory HARDWARE

31
1.5. Les appels-systèmes Les appels-systèmes permettent aux applications d'utiliser les ressources systèmes (gestion des processus, fichiers, mémoire I/O). Ils font basculer l'application de l'exécution en mode utilisateur à l'exécution en mode "kernel" (noyau) Ils déclenchent pour cela une interruption du cours normal de l'exécution vers un traitement (handler) en mode noyau.
. Ils font basculer l application de l exécution en mode utilisateur à l exécution en mode kernel (noyau) Ils déclenchent pour cela une interruption du cours normal de l exécution vers un traitement (handler) en mode noyau.")
32
Chapitre 2 Gestion des Processus 2.1. Les processus
2.2. L'ordonnancement des processus

33
2.1. Les processus Un processus est un programme en exécution
Un processus est caractérisé par un contexte d ’exécution segments de texte, données et pile compteur spécifiant l’instruction suivante à exécuter registres

34
Les segments d'un processus: le texte, les données, la pile
.

35
Etats d'un processus ordonnanceur .

36
L'importance de l'ordonnanceur
Une des bases d'un OS multiprogrammé est le traitement des interruptions l'ordonnancement

37
Opérations sur les processus
Création de nouveaux processus Terminaison de processus Suspension Interne (wait) Externe (attente d’une ressource) P1 P2 P4 P3 P5 P7 P6 Arbre de processus
 Externe (attente d’une ressource) P1. P2. P4. P3. P5. P7. P6. Arbre de processus.")
38
Création de processus Un processus (père) peut créer des processus fils stockage en une structure d'arbre de processus, chaque processus connaît son père Partage de ressources (mémoire, fichiers) entre père et fils total ou partiel Exécution soit concurrente soit le père attend la terminaison du fils
 entre père et fils. total ou partiel. Exécution. soit concurrente. soit le père attend la terminaison du fils.")
39
La terminaison de processus
Exécution de la dernière instruction ou appel système exit() . L'O.S. libère les ressources employées Le père en attente peut se réactiver Un parent peut arrêter son exécution (abort()) ou un processus peut "tuer" un autre s'il en a le droit (kill()) Les processus orphelins (père mort) sont généralement associés au processus racine.
 . L O.S. libère les ressources employées. Le père en attente peut se réactiver. Un parent peut arrêter son exécution (abort()) ou un processus peut tuer un autre s il en a le droit (kill()) Les processus orphelins (père mort) sont généralement associés au processus racine.")
40
La terminaison de processus
4 possibilités: Sortie normale (appel exit() ou fin de code) Sortie en cas d'erreur (volontaire, appel abort()) Erreur fatale (involontaire, kill() par l'O.S.) Processus tué par un autre (involontaire, appel- système kill())
 ou fin de code) Sortie en cas d erreur (volontaire, appel abort()) Erreur fatale (involontaire, kill() par l O.S.) Processus tué par un autre (involontaire, appel- système kill())")
41
Implémentation des processus
PCB = Process Control Block Bloc d'informations caractérisant complètement un processus état compteur d'instruction état des registres paramètres de priorité et d'ordonnancement paramètres de gestion de la mémoire informations comptables informations I/O (fichiers ouverts…)
")
42
Process Control Block (PCB)
")
43
Les PCB permettent d'interrompre et de relancer des processus

44
2.2. L'ordonnancement des processus
Bursts of CPU usage alternate with periods of I/O wait (a) a CPU-bound process (b) an I/O-bound process
 a CPU-bound process. (b) an I/O-bound process.")
45
Objectifs de l’ordonnancement
Beau problème multicritère! Il n ’y a pas qu’une politique d’ordonnancement mais des politiques paramétrées Souvent, on choisit une politique, que l’on adapte (tuning) à la situation concrète nombre et type de processus, priorités, contraintes,...
 à la situation concrète. nombre et type de processus, priorités, contraintes,...")
46
Algorithmes d'ordonnancement
Premier arrivé, premier servi (FCFS) Plus court d'abord (SJF) Avec priorité Carrousel (Round Robin) Avec files multiples
 Plus court d abord (SJF) Avec priorité. Carrousel (Round Robin) Avec files multiples.")
47
L’ordonnancement le plus simple First Come First Served
Souvent frustrant (attente pour les jobs courts) Job CPU use temps d'attente moyen =17 2 3 1 t=0 24 30
 Job CPU use temps d attente moyen = t=")
48
Ordonnancement Shortest-Job-First (SJF)
Associe à chaque processus une estimation n+1 de la durée de la prochaine utilisation CPU (CPU burst). Choisit le processus avec le plus petit n+1 Difficulté: l'estimation n+1 SJF est optimal : il donne le temps moyen d'attente minimal pour un ensemble de processus donnés (où l'on connaît les temps successifs d'exécution!)
. Choisit le processus avec le plus petit n+1. Difficulté: l estimation n+1. SJF est optimal : il donne le temps moyen d attente minimal pour un ensemble de processus donnés (où l on connaît les temps successifs d exécution!)")
49
SJF non préemptif ou préemptif
2 schémas possibles nonpréemptif préemptif: réquisitionner le CPU si un processus nouveau a une estimation n+1 plus petite que le temps estimé restant du processus en cours. Ce schéma est connu sous le nom de Shortest-Remaining-Time-First (SRTF).
.")
50
Ordonnancement par priorité
Une priorité (nombre entier positif) est associée à chaque processus Le CPU est alloué au processus prêt avec la plus haute priorité (FIFO par priorité) (plus petit entier = plus haute priorité), de manière préemptive ou non. SJF est en fait un ordonnancement par priorité où la priorité est l'estimation du temps CPU du prochain cycle Problème Famine: un processus avec faible priorité peut attendre très longtemps Solution Priorité dynamique en fonction du temps d'attente. Au plus on attend, au plus la priorité augmente
 est associée à chaque processus. Le CPU est alloué au processus prêt avec la plus haute priorité (FIFO par priorité) (plus petit entier = plus haute priorité), de manière préemptive ou non. SJF est en fait un ordonnancement par priorité où la priorité est l estimation du temps CPU du prochain cycle. Problème Famine: un processus avec faible priorité peut attendre très longtemps. Solution Priorité dynamique en fonction du temps d attente. Au plus on attend, au plus la priorité augmente.")
51
Ordonnancement "Carrousel" Round Robin (RR)
Définition d'une durée maximale d'utilisation continue du CPU par processus (quantum), par ex millisecondes. Quand un processus en exécution atteint son quantum, il est interrompu.Choix FIFO des processus prêts (Carrousel) Si n processus prêts avec un quantum q, chaque processus utilisera 1/n du CPU au plus un temps q. Aucun processus n'attend donc plus de (n-1)q unités de temps si q grand => FIFO si q petit, beaucoup de pertes
, par ex millisecondes. Quand un processus en exécution atteint son quantum, il est interrompu.Choix FIFO des processus prêts (Carrousel) Si n processus prêts avec un quantum q, chaque processus utilisera 1/n du CPU au plus un temps q. Aucun processus n attend donc plus de (n-1)q unités de temps. si q grand => FIFO. si q petit, beaucoup de pertes.")
52
Ordonnancement avec files multiples
Le pool des processus prêts est partitionné en différentes files suivant le type de processus ou ses priorités Chaque file peut avoir son propre algorithme d'ordonnancement file de processus utilisateurs interactifs – RR file de processus système – FCFS file de processus batch - Par priorité Un ordonnancement doit être effectué entre les files.

53
Ordonnancement avec files multiples (2)
Priorités de files: d'abord les processus systèmes, ensuite les processus interactifs, enfin les batchs. Si priorité fixe, danger de famine. Réserver des quotas d'utilisation CPU par files: maximum 20% pour la file système, 50% pour l'interactive, 30% pour la batch (éventuellement quota dynamique suivant le moment de la journée).
.")
54
Ordonnancement avec files multiples (3)
")
55
Ordonnancement avec files multiples et feedback
Possibilité de transition d'un processus d'une file à une autre en fonction de son temps d'attente De nombreux paramètres sont à considérer: nombre de files ordonnanceur pour chaque file algorithme de rehaussement de priorité algorithme d'abaissement de priorité algorithme de choix de file de départ

56
Ordonnancement temps-réel
Garantie d'exécution de certains processus en des temps déterminés. Cela nécessite de l'ordonnanceur: la préemption possible (réquisition du CPU) la gestion des priorités
 la gestion des priorités.")
57
2.3. Threads Dans la plupart des systèmes d’exploitation, chaque processus a un espace d’adresse et un seul chemin d’exécution. Cependant, on trouve des situations dans lesquelles il est souvent souhaitable d’avoir plusieurs chemins d’exécution partageant le même espace d’adressage et fonctionnant en quasi-parallèle comme si c’étaient des processus distincts. Plusieurs systèmes d’exploitation nouveaux proposent un tel mécanisme à travers des threads. Un thread est une unité de base d’utilisation de l’UC. Chaque thread s’exécute séquentiellement, possède son propre compteur d’instructions, ses registres et sa propre pile. Les threads partagent l’UC de la même façon que les processus: l’un d’entre eux est exécuté, puis c’est le tour d’un autre.

58
Communication entre processus
Chapitre 3 Communication entre processus 3.1. Mécanismes 3.2. Synchronisation 3.3. Problèmes classiques

59
3.1. Mécanismes Signaux Un signal est la notification à un processus de l'occurrence d'un événement. Il existe différents signaux, chacun destiné à un type d'événement particulier. Les signaux peuvent être vus comme des interruptions logicielles effectuées sur les processus. Les signaux sont asynchrones, c’est-à-dire que le processus auquel un signal est délivré ne peut pas déterminer à l'avance le moment où il recevra le signal. Les processus ne peuvent pas échanger des données par ce mécanisme.

60
Tubes Un tube est un canal de communication directe entre 2 processus. Il transporte un flot d'octet. L'ordre des caractères en entrée est conservé en sortie (premier entré, premier sorti). Un tube est de taille limitée (souvent 4096 caractères). Pour lire et écrire dans un tube, le système d’exploitation fournit des appels système read, write aux processus. Le système assure donc la synchronisation de l'ensemble dans le sens où: il bloque le processus lecteur du tube lorsque le tube est vide en attendant qu'il se remplisse; il bloque (éventuellement) le processus écrivain lorsque le tube est plein (si le lecteur est plus lent que l'écrivain et que le volume des résultats écrits est important).
. Un tube est de taille limitée (souvent 4096 caractères). Pour lire et écrire dans un tube, le système d’exploitation fournit des appels système read, write aux processus. Le système assure donc la synchronisation de l ensemble dans le sens où: il bloque le processus lecteur du tube lorsque le tube est vide en attendant qu il se remplisse; il bloque (éventuellement) le processus écrivain lorsque le tube est plein (si le lecteur est plus lent que l écrivain et que le volume des résultats écrits est important).")
61
Mémoire partagée Le concept de mémoire partagée permet à plusieurs processus d'accéder à un même segment de mémoire. Aucun transfert entre processus n'est nécessaire, les données sont simplement placées à un endroit accessible par les différents processus. C'est le moyen le plus rapide pour échanger des données entre processus mais cette façon de communiquer pose certains problèmes de cohérence d’informations et de coordination.

62
Files de messages Une file de messages est un mécanisme de communication s’apparentant au concept de boîte aux lettres qui permet la communication indirecte entre différents processus. Avec ce mécanisme, les messages sont envoyés et reçus à la file de messages comme dans une boîte aux lettres. Un processus peut communiquer avec d’autres à travers plusieurs files de messages différents. Deux processus ne peuvent communiquer que s’ils partagent une file de messages. Chaque file de message a une identification unique et les primitives send et receive. Avec la file de messages, les processus peuvent échanger des données structurées.

63
Les sockets Les sockets sont des points de connexion pour une communication. Une socket en utilisation possède généralement une adresse associée par laquelle un processus pourra émettre ou recevoir de l’information. En première approximation, les modèles de communication qui sont accessibles à travers les sockets sont tout à fait analogues à deux outils de la vie courante: le courrier et le téléphone. Le mécanisme de socket peut être utilisé par des processus qui ne sont pas en relation. De plus, il fournit une interface générale pour les fonctions de gestion de réseaux.

64
3.2. La synchronisation entre processus
L’exclusion mutuelle de ressources non partageables La synchronisation car la vitesse relative de deux processus est imprévisible puisqu'elle dépend de la fréquence des interruptions de chaque processus, ainsi que de la durée de travail et de la fréquence d’attribution des processeurs aux processus. On peut dire que les processus se déroulent de manière asynchrone les uns par rapport aux autres. Toutefois, pour assurer une certaine coopération, les processus doivent synchroniser leurs activités à certains moments du traitement lorsqu’un processus ne peut pas poursuivre avant qu’un autre processus n’ait achevé son traitement. Le système d’exploitation doit donc fournir un mécanisme de synchronisation.

65
Section critique Problème d'accès concurrents (race condition) Soient deux processus comptables P1 et P2 qui partagent une même zone mémoire. Chaque processus veut retirer un montant d’un compte: if (balance - retrait >=0) balance := balance - retrait; else error( "on ne peut plus retirer !" ); Supposez que la balance soit égale à 800, le processus P1 veut retirer 500 et le processus P2 400.
 balance := balance - retrait; else. error( on ne peut plus retirer ! ); Supposez que la balance soit égale à 800, le processus P1 veut retirer 500 et le processus P")
66
Un bon moyen d’éviter le conflit d'accès doit satisfaire les quatre conditions suivantes:
Deux processus ne peuvent être en même temps en section critique. Aucune hypothèse ne doit être faire sur les vitesses relatives des processus et sur le nombre de processus. Aucun processus suspendu en dehors d’une section critique ne doit bloquer les autres processus. Aucun processus ne doit attendre trop longtemps avant d’entrer en section critique.

67
Solution " busy waiting" Solutions logicielles Les variables de verrouillage Les processus partagent une variable (verrou), unique, qui a initialement la valeur 0. Un processus doit tester ce verrou avant d’entrer en section critique. Si le verrou vaut 0, le processus le met à 1 et entre dans sa section critique. Si le verrou est déjà à 1, le processus attend qu’il repasse à 0. L’alternance C’est une approche applicable à seulement deux processus à la fois. On laisse aux processus partager une variable partagée, tour. Ne fonctionne que si l'alternance est parfaite.
, unique, qui a initialement la valeur 0. Un processus doit tester ce verrou avant d’entrer en section critique. Si le verrou vaut 0, le processus le met à 1 et entre dans sa section critique. Si le verrou est déjà à 1, le processus attend qu’il repasse à 0. L’alternance. C’est une approche applicable à seulement deux processus à la fois. On laisse aux processus partager une variable partagée, tour. Ne fonctionne que si l alternance est parfaite.")
68
Solutions matérielles
Le masquage des interruptions Laisser aux processus masquer les interruptions avant d’entrer dans la section critique et les restaurer à la fin de la section. (L’interruption horloge ne peut pas avoir lieu lorsque les interruptions sont masquées). Le processeur ne pourra donc plus être alloué à un autre processus.
. Le processeur ne pourra donc plus être alloué à un autre processus.")
69
L’instruction TSL Solution qui requiert un peu d’aide de la part du matériel. Plusieurs ordinateurs fournissent une instruction spéciale qui permet de tester et de modifier le contenu d’un mot d’une manière atomique. while (TRUE) { while (Test-and-Setlock(lock)); section-critique(); lock := FALSE; section-noncritique(); }
 { while (Test-and-Setlock(lock)); section-critique(); lock := FALSE; section-noncritique(); }")
70
Solutions « SLEEP and WAKEUP »
Pour éviter l’inconvénient du busy waiting, on peut utiliser quelques primitives de communication interprocessus qui se bloquent au lieu de prendre du temps processeur lorsqu’elles ne sont pas autorisées à entrer en section critique. SLEEP est un appel système qui suspend l’appelant en attendant qu’un autre processus le réveille. L’appel WAKEUP a un seul paramètre: le processus à réveiller.

71
Sémaphores Introduit par E. J. Dijkstra en 1965, un sémaphore s est une variable qui a les propriétés suivantes: Une valeur e(s) qui est un entier positif. Une file d'attente f(s) qui contient des processus bloqués sur le sémaphore s Sur un sémaphore, seules deux opérations sont autorisées: Down (s): décrémente la valeur du sémaphore. Si la valeur du sémaphore s est >= à 0, le processus poursuit son exécution normalement, sinon, le processus est mis en attente. Up (s): incrémente la valeur du sémaphore s. Si un ou plusieurs processus étaient en attente sur le sémaphore s, bloqués par une opération Down, l’un d’entre eux sera choisi par le système pour terminer son Down.
 qui est un entier positif. Une file d attente f(s) qui contient des processus bloqués sur le sémaphore s. Sur un sémaphore, seules deux opérations sont autorisées: Down (s): décrémente la valeur du sémaphore. Si la valeur du sémaphore s est >= à 0, le processus poursuit son exécution normalement, sinon, le processus est mis en attente. Up (s): incrémente la valeur du sémaphore s. Si un ou plusieurs processus étaient en attente sur le sémaphore s, bloqués par une opération Down, l’un d’entre eux sera choisi par le système pour terminer son Down.")
72
Down (s): e(s) := e(s) - 1; if e(s) < 0 { état (P):= bloqué; entrer (P, f(s)); } Up (s): e(s) := e(s) + 1; if e(s) 0 { sortir (Q, f(s)); // Q est un processus bloqué sur s; état(Q) := prêt; entrer(Q, file d’attente de processus prêts);
 0 { sortir (Q, f(s)); // Q est un processus bloqué sur s; état(Q) := prêt; entrer(Q, file d’attente de processus prêts);")
73
Sémaphores d'Exclusion Mutuelle
Le concept de sémaphore permet de résoudre le problème de la section critique pour n processus. Les n processus partagent un sémaphore s, e(s) est initialisé à 1. Tous les processus doivent suivre la même règle suivante: while (TRUE) { Down (s) section-critique(); Up (s) section-noncritique(); }
 est initialisé à 1. Tous les processus doivent suivre la même règle suivante: while (TRUE) { Down (s) section-critique(); Up (s) section-noncritique(); }")
74
Sémaphores de Synchronisation
Dans une situation où un processus doit en attendre un autre pour continuer (ou commencer) son exécution. Les deux processus partagent un sémaphore s, e(s) est initialisée à 0. Tous les deux doivent suivre la règle suivante: Processus 1 while (TRUE) { travail1 (); Up (s); // réveille processus 2 } Processus 2 Down (s); // attente processus 1 travail2 ();
 son exécution. Les deux processus partagent un sémaphore s, e(s) est initialisée à 0. Tous les deux doivent suivre la règle suivante: Processus 1. while (TRUE) { travail1 (); Up (s); // réveille processus 2. } Processus 2. Down (s); // attente processus 1. travail2 ();")
75
Moniteurs C’est au compilateur de réaliser l’exclusion mutuelle au niveau des entrées dans le moniteur. Echange de messages Un processus contrôle la ressource et octroie la ressource en fonction des messages reçus.

76
3.3 Problèmes classiques de synchronisation
Problème du producteur – consommateur BufferSize := 3; // nbre d’emplacements dans le buffer Semaphore mutex := 1; //Contrôle accès section critique Semaphore vide := BufferSize; // nbre d’emplacements libres Semaphore plein := 0; // nbre d’emplacements occupés

77
Producer() { int objet; while (TRUE) { produire_objet (&objet); // produire l’objet suivant down (&vide); // décrémente nbre d’emplacements libres down (&mutex); // entrer en section critique mettre_objet (objet); // mettre l'objet dans le buffer up (&mutex); // sortir de la section critique up (&plein); // incrémente nbre d’emplacements occupés }
; // décrémente nbre d’emplacements libres. down (&mutex); // entrer en section critique. mettre_objet (objet); // mettre l objet dans le buffer. up (&mutex); // sortir de la section critique. up (&plein); // incrémente nbre d’emplacements occupés. }")
78
Consumer() { int objet; while (TRUE) { down (&plein); // décrémente nbre d’emplacements occupés down (&mutex); // entrer en section critique retirer_objet (&objet); // retirer l’objet du buffer up (&mutex); // sortir de la section critique up (&vide); // incrémente nbre d’emplacements libres utiliser_objet (objet); // utiliser l’objet }
; // entrer en section critique. retirer_objet (&objet); // retirer l’objet du buffer. up (&mutex); // sortir de la section critique. up (&vide); // incrémente nbre d’emplacements libres. utiliser_objet (objet); // utiliser l’objet. }")
79
Gestion des processus: gare aux deadlocks!
(a) Un deadlock potentiel (b) Un deadlock réel
 Un deadlock potentiel (b) Un deadlock réel.")
80
Consumer() { int objet; while (TRUE) { down (&mutex); // entrer en section critique down (&plein); // décrémente nbre d’emplacements occupés retirer_objet (&objet); // retirer l’objet du buffer up (&mutex); // sortir de la section critique up (&vide); // incrémente nbre d’emplacements libres utiliser_objet (objet); // utiliser l’objet }
; // décrémente nbre d’emplacements occupés. retirer_objet (&objet); // retirer l’objet du buffer. up (&mutex); // sortir de la section critique. up (&vide); // incrémente nbre d’emplacements libres. utiliser_objet (objet); // utiliser l’objet. }")
81
Le modèle des lecteurs et des rédacteurs
semaphore mutex := 1; // contrôler accès à rc semaphore bd := 1; // contrôler accès à base de données int rc; // nombre de processus lecteurs Rédacteur() { while (TRUE) { creer_donnees (); // section non critique down (&bd); // obtenir l’accès exclusif à bd ecrire_donnees (); // mettre à jour les données up (&bd); // libérer l’accès à rc }
 { while (TRUE) { creer_donnees (); // section non critique. down (&bd); // obtenir l’accès exclusif à bd. ecrire_donnees (); // mettre à jour les données. up (&bd); // libérer l’accès à rc. }")
82
Lecteur () { while (TRUE) { down (&mutex); // obtenir l’accès exclusif à rc rc := rc + 1; // un lecteur de plus if (rc = 1) // si c’est le premier lecteur down (&bd); // empêcher un rédacteur d’accéder à bd up (&mutex); // libérer l’accès à rc lire_base_de_donnees (); // lire les données down (&mutex); // obtenir l’accès exclusif à rc rc := rc - 1; // un lecteur de moins if (rc = 0) // si c’est le dernier lecteur up (&bd); // permettre au rédacteur d’accéder à bd up (&mutex); // libérer l’accès à rc utiliser_donnees_lues (); // section non critique } }
 // si c’est le premier lecteur. down (&bd); // empêcher un rédacteur d’accéder à bd. up (&mutex); // libérer l’accès à rc. lire_base_de_donnees (); // lire les données. down (&mutex); // obtenir l’accès exclusif à rc. rc := rc - 1; // un lecteur de moins. if (rc = 0) // si c’est le dernier lecteur. up (&bd); // permettre au rédacteur d’accéder à bd. up (&mutex); // libérer l’accès à rc. utiliser_donnees_lues (); // section non critique. } }")
83
3.4 Interblocage (deadlock)
Un ensemble de processus est en interblocage si chaque processus attend un événement que seul un processus de l’ensemble peut engendrer. Exemple: problème du dîner des philosophes P1 P5 P4 P2 P3

84
Il faut réunir quatre conditions pour provoquer un interblocage:
L’exclusion mutuelle: chaque ressource est, soit attribuée à un seul processus, soit disponible. La détention et l’attente: les processus qui détiennent des ressources précédemment obtenues peuvent en demander de nouvelles. Pas de réquisition: les ressources obtenues par un processus ne peuvent lui être retirées contre son gré. Elles doivent être explicitement libérées par le processus qui les détient. L’attente circulaire: il doit y avoir un cycle d’au moins deux processus, chacun attendant une ressource détenue par un autre processus du cycle.

85
Traitement des interblocages
Prévenir Eviter Détecter Corriger

86
Chapitre 4 Gestion de la mémoire
La mémoire est un tableau à une dimension de mots machines (ou d’octets) chacun ayant une adresse propre. Les échanges avec l’extérieur se font en général par des lectures ou des écritures à des adresses spécifiques. La mémoire est le point central dans un système d’exploitation; c’est à travers elle que l’UC communique avec l’extérieur.
 chacun ayant une adresse propre. Les échanges avec l’extérieur se font en général par des lectures ou des écritures à des adresses spécifiques. La mémoire est le point central dans un système d’exploitation; c’est à travers elle que l’UC communique avec l’extérieur.")
87
correspondance entre adresses logiques et adresses physiques: comment convertir les adresses symboliques dans un programme en adresses réelles dans la mémoire principale? gestion de la mémoire physique: comment étendre la mémoire disponible pour pouvoir maintenir plusieurs processus? partage de l’information: comment permettre aux différents processus de partager des informations en mémoire? protection: comment éviter au processus de porter atteinte aux zones de mémoire allouées aux autres processus?

88
Espace adresse logique versus espace adresse physique
Adresse logique - produite par l’unité centrale de traitement; également désignée sous le nom d'adresse virtuelle. Adresse physique - adresse vue par l’unité de mémoire. - La conversion au moment de l’exécution des adresses logiques en adresses physiques est effectuée par la memory-management unit (MMU) qui est un dispositif matériel. Les adresses logiques et physiques sont les mêmes dans le schéma de liaison d’adresses au moment de la compilation et du chargement; les adresses logiques et physiques diffèrent dans le schéma de liaison d’adresses au moment de l’exécution.
 qui est un dispositif matériel. Les adresses logiques et physiques sont les mêmes dans le schéma de liaison d’adresses au moment de la compilation et du chargement; les adresses logiques et physiques diffèrent dans le schéma de liaison d’adresses au moment de l’exécution.")
89
Allocation contigüe Systèmes monoprogrammés: La mémoire est partagée entre le système d’exploitation et un processus unique. A un instant donné, une portion de la mémoire contient le système d’exploitation, le reste contient un seul processus. Ce processus peut parfois utiliser toute la mémoire disponible. Systèmes multiprogrammés avec des partitions fixes: La mémoire est divisée en n partitions ayant une taille fixe (des partitions différentes peuvent avoir des tailles égales ou inégales). Utilisation des registres de base et limite. Systèmes multiprogrammés avec partitions variables: On alloue des partitions variables aux processus et on choisit l'emplacement dynamiquement lors de l’entrée en mémoire du processus.
. Utilisation des registres de base et limite. Systèmes multiprogrammés avec partitions variables: On alloue des partitions variables aux processus et on choisit l emplacement dynamiquement lors de l’entrée en mémoire du processus.")
90
Systèmes multiprogrammés avec "swapping": Un processus qui est en attente durant une période relativement longue sera transféré en mémoire auxiliaire (swap out) pour libérer la mémoire principale pour d'autres processus. Quand son attente est terminée, il peut être ramené en mémoire principale (swap in) pour continuer son exécution.
 pour continuer son exécution..")
91
Allocation non contigüe
Pagination: La mémoire physique est découpée en blocs de taille fixe appelés cadres de pages. La mémoire logique est également subdivisée en blocs de la même taille appelés pages. Quand on doit exécuter un processus, on charge ses pages dans les cadres de pages de mémoire disponibles. Un processus de taille N pages requiert N cadres de pages libres. Memory Management Unit pour la pagination: Pour définir la conversion d’adresse, le support matériel pour la pagination est une table de pages. La table de pages contient l’adresse de base de chaque page dans la mémoire physique.

92
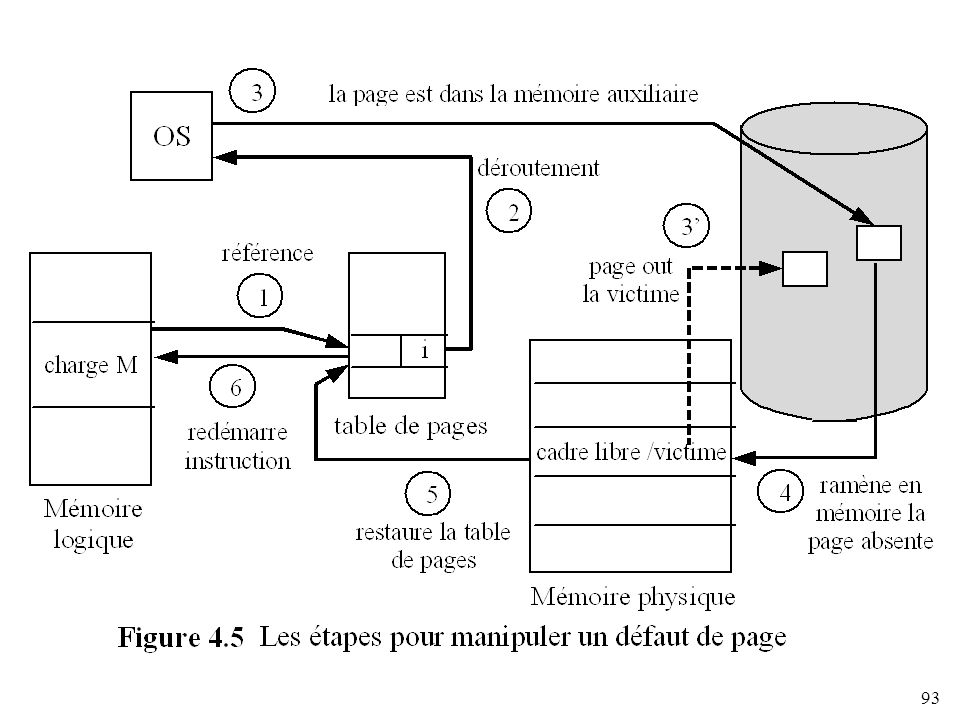
Mémoire virtuelle La mémoire virtuelle est une technique autorisant l'exécution de processus pouvant ne pas être complètement en mémoire. La mémoire virtuelle schématise la mémoire comme un tableau de stockage uniforme extrêmement grand, séparant la mémoire logique telle que la voit l’utilisateur de la mémoire physique. La mémoire virtuelle est communément implémentée avec la pagination à la demande équivalente à la pagination avec swapping.

94
Protection et sécurité
Chapitre 5 Protection et sécurité 5.1 Objectifs de la protection 5.2 Domaines de protection 5.3 Matrice d'accès 5.4 Implémentation de la matrice de droits 5.5 Sécurité

95
5.1 Objectifs de la protection
éviter la violation pernicieuse intentionnelle d’une restriction d’accès par un utilisateur, assurer que chaque composante d’un système emploie les ressources du système seulement dans une forme cohérente avec les politiques instaurées pour l’utilisation de ces ressources, améliorer la fiabilité d’un système en détectant des erreurs latentes dans les interfaces entre les sous-systèmes composants.

96
5.2 Domaines de protection
Tous les processus fonctionnent dans un certain domaine de protection. Le domaine de protection indique à quelles ressources le processus peut accéder et quelles exécutions particulières le processus peut exécuter. La capacité d'exécuter une certaine exécution sur une certaine ressource s'appelle un droit d'accès. Un domaine est une collection de droits d'accès. On définit un domaine par une paire ordonnée <objet, ensemble de droit d'accès>. Les domaines peuvent partager les droits d’accès. L’association entre un processus et un domaine peut être statique ou dynamique. Le processus peut devoir changer dynamiquement des droits d'accès pour des procédures du système d’exploitation.

97
Un domaine peut être associé à:
Un utilisateur: tous les processus d'un utilisateur sont dans le même domaine. On commute de domaine quand on change d’utilisateur. Un processus: les différents processus du même utilisateur peuvent être dans différents domaines. On commute de domaine quand un processus envoie un message à un autre et attend ensuite une réponse. Une procédure: les différentes procédures peuvent appartenir à différents domaines. On commute de domaine quand on effectue un appel à une procédure.

98
5.3 Matrice d'accès Le modèle de protection peut être envisagé de façon abstraite comme une matrice, appelée matrice de droits. Les lignes de la matrice de droits représentent les domaines, et les colonnes les objets. Chaque entrée dans la matrice consiste en un ensemble de droits d’accès. L'entrée droit (i, j) définit l’ensemble des opérations qu’un processus, s’exécutant dans le domaine Di, peut appeler sur un objet Oj.
 définit l’ensemble des opérations qu’un processus, s’exécutant dans le domaine Di, peut appeler sur un objet Oj.")
99
5.4 Implémentation de la matrice de droits
L’implémentation la plus simple de la matrice des droits est une table globale consistant en un ensemble de triplets ordonnés <domaine, objet, ensemble de droits>. A chaque fois que l’on exécute une opération M sur un objet Oj dans le domaine Di, on cherche dans la table globale un triplet < Di, Oj, Rk > où M Rk. Si on trouve ce triplet, on permet à l’opération de continuer. Sinon, il se produit une situation d’erreur. Cette implémentation possède plusieurs désavantages: la table est généralement grande et elle ne peut donc pas être maintenue en mémoire principale, il est difficile de profiter de groupements spéciaux d’objets ou de domaines.

100
Solutions: Liste d’accès aux objets Liste de capacités des domaines Un mécanisme de clés et verrous

101
5.5 Sécurité erreurs de programmation (d'un utilisateur, ou du système lui-même) qui se propagent au système (du fait de contrôles insuffisants ou mal effectués) mauvais fonctionnement du matériel opérateur, concepteur ou réalisateur malveillant ou peu scrupuleux (quand il s'agit d'informations financières!).
 qui se propagent au système (du fait de contrôles insuffisants ou mal effectués) mauvais fonctionnement du matériel. opérateur, concepteur ou réalisateur malveillant ou peu scrupuleux (quand il s agit d informations financières!).")
102
Authentification Les mots de passe peuvent être générés par le système ou sélectionnés par les utilisateurs. Le problème commun à cet approche consiste à garder secret le mot de passe. Menaces contre les programmes Le cheval de Troie Porte de contournement

103
Menaces contre les systèmes Ver Virus Surveillance de menaces Le système peut contrôler des formes suspectes d’activité pour détecter une violation de sécurité. Une liste de contrôle enregistre l’heure, l’utilisateur et tous les types d'accès à un objet.

Présentations similaires











 II (Tanenbaum 2.3)>")
 III (Tanenbaum 2.3)>")

>")




