Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Laboratoire de robotique du Versailles
Analyse des méthodes de détermination de l’adhérence mobilisable dans les systèmes électroniques ABS et ESP

2
Introduction: L'adhérence est le coefficient de frottement entre les roues et le sol. Quand il y a peu d'adhérence il est aussi difficile d'avancer que de s'arrêter. L'adhérence est nécessaire à trois phénomènes extrêmement utiles dans notre pratique La motricité Le freinage Le guidage

3
Le glissement : s = - [(V – R.) / V]
Où : V : la vitesse du centre de pneu. : la vitesse de la roue. R : le rayon effectif de la roue. La formule de Pacejka donne le rapport non linéaire entre la force transmise par le pneu et le glissement de ce dernier.
![Le glissement : s = - [(V – R.) / V]](http://slideplayer.fr/slide/517149/2/images/3/Le+glissement+%3A+s+%3D+-+%5B%28V+%E2%80%93+R.%EF%81%97%29+%2F+V%5D.jpg "Où : V : la vitesse du centre de pneu. : la vitesse de la roue. R : le rayon effectif de la roue. La formule de Pacejka donne le rapport non linéaire entre la force transmise par le pneu et le glissement de ce dernier.")
4
Fx : la force longitudinale. Frr : la résistance de roulement.
F = Cx . S Où : Cx est la rigidité de glissement. m.a = Fx - Frr – Fd – m.g.sin() Où : Fx : la force longitudinale. Frr : la résistance de roulement. Fd : la force aérodynamique. : l’inclinaison de la route. m.a = Fx
 Où : Fx : la force longitudinale. Frr : la résistance de roulement. Fd : la force aérodynamique. : l’inclinaison de la route. m.a = Fx.")
5
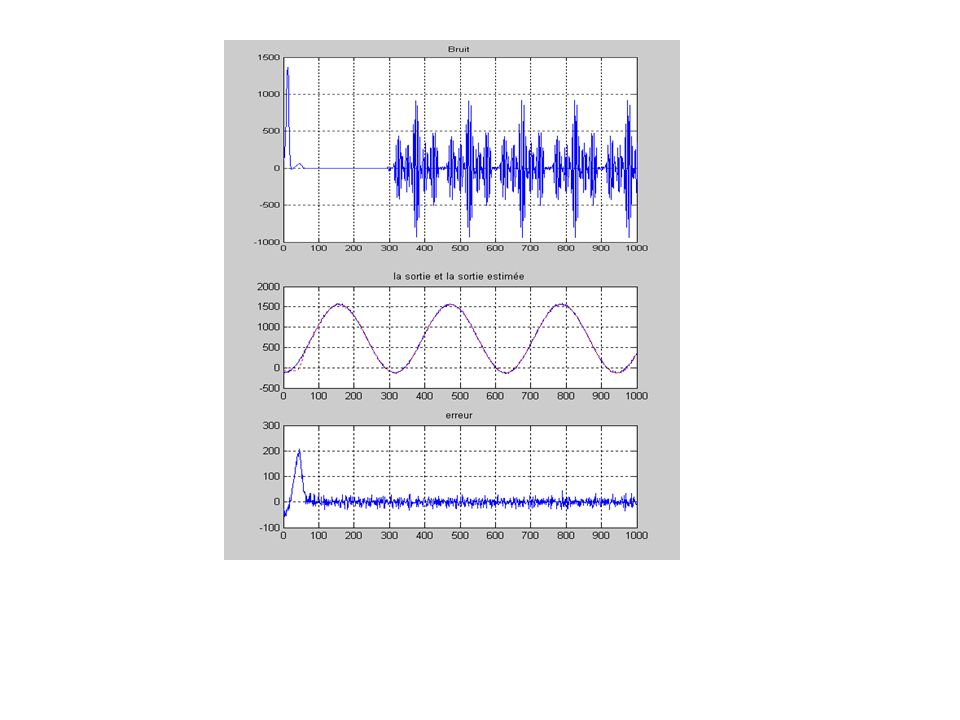
Méthodes d’estimation: I- Les moindres carrés: I-1 Linéaire
I-2 Non linéaire II- Le filtre de Kalman Simulation : Les paramètres de simulation sont fixés de la façon suivante : m = 400 kg Rd = 0.3 ; Cx = 50000 V=15.sin(2..t) = 3.sin(2..t) .
 = 3.sin(2..t) .")
Présentations similaires