Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Biométrie main

2
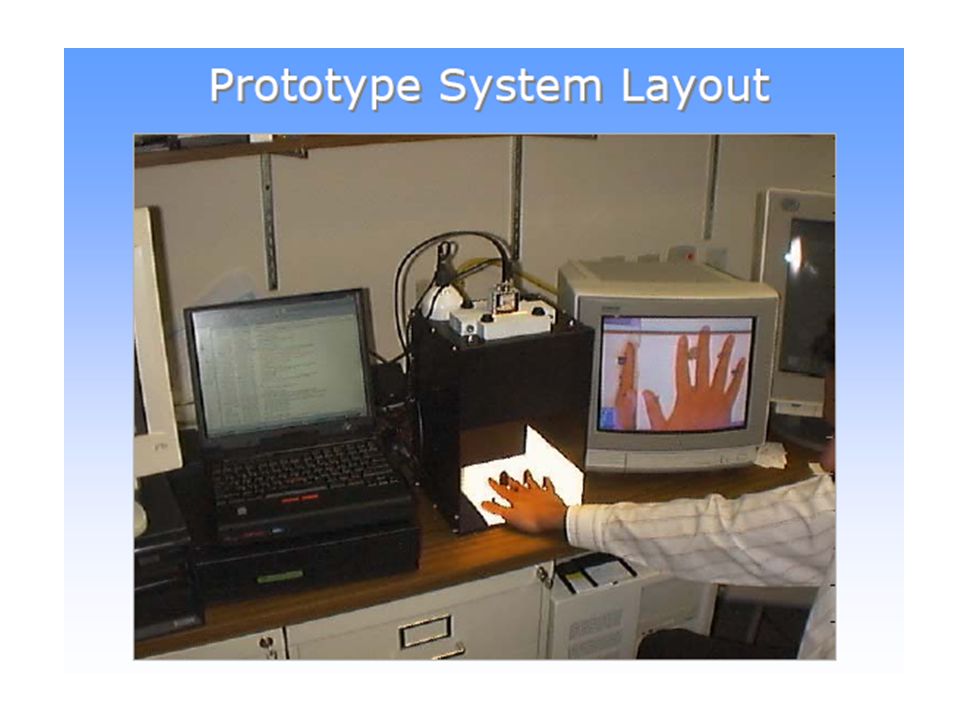
Hand ID System US Patent 3576537,1971 Richard H. Ernst

3
Vérification basée sur la géométrie de la main Longueur, largeur, épaisseur, courbure et articulation des doigts = caractéristiques uniques Acquisition de la silhouette ou de la forme 3D

4
Pourquoi la géométrie de la main? Non intrusif et simple dusage Acquisition peu coûteuse Utilise des caractéristiques simples et sans trace Robuste aux changement de lenvironnement Excellentes performances en vérification

6
Enregistrement Trois acquisitions (moyennées) consécutives via un scanner muni de taquets (pins) Templates de faible taille (une dizaine doctets) Taux FE extrêmement faible
 consécutives via un scanner muni de taquets (pins) Templates de faible taille (une dizaine doctets) Taux FE extrêmement faible")
7
Aspects pratiques FRR affecté par la qualité / normalisation de lenregistrement Sensible à la position (hauteur plateau, posture personne) mais feedback possible Nécessité de faire évoluer les templates avec le temps Enfants jusquà 8 ans et même moins
 mais feedback possible Nécessité de faire évoluer les templates avec le temps Enfants jusquà 8 ans et même moins")
9
Exemple: HG-4 HandKey Système de lecture de la géométrie de la main (< 512 usagers) basé uniquement sur la géométrie 3D de la main; fonctionne en moins d1s; capture 32000 pixels et en extrait 90 mesures : longueurs, épaisseurs, largeurs, surface des doigts et de la main; insensible aux coupures, poussières et autres « bruits »
 basé uniquement sur la géométrie 3D de la main; fonctionne en moins d1s; capture pixels et en extrait 90 mesures : longueurs, épaisseurs, largeurs, surface des doigts et de la main; insensible aux coupures, poussières et autres « bruits »")
12
Exemple dun système à CMU Pigs (plots) Comment mesurer la distance ? Prendre en compte la forme locale de la courbe dans le calcul de la distance de 2 points Alignement séparé de chaque doigt

13
Forme générale acquisition

14
Binarisation et extraction du contour Binarisation: critère colorimétrique Détermination des composantes (régions) Suivi du contour de la grande région Centres des 4 petites régions correction géométrique
 Suivi du contour de la grande région Centres des 4 petites régions correction géométrique")
15
Binarisation Couleur du fond différente de la couleur de la main Seuillage dans le bon espace colorimétrique Amélioration (érosion + dilatation)
")
16
Binarisation suite Histogramme de Cb Cb<140

17
Amélioration Après 5 érosions + 5 dilatations Erosion: tout pixel 1 qui a un voisin à 0 est mis à 0 Dilatation:tout pixel 0 qui a un voisin à 1 est mis à 1

18
Contours / points caractéristiques Point de référence Distance minimale /maxi localement

19
alternative

20
Correction géométrique Apparence due à la perspective Forme normalisée (vue du dessus et de taille fixée) [x y 1].A = [x y 1] A matrice 3x3 Point de repère
![Correction géométrique Apparence due à la perspective Forme normalisée (vue du dessus et de taille fixée) [x y 1].A = [x y 1] A matrice 3x3 Point de repère](http://images.slideplayer.fr/2/519971/slides/slide_20.jpg "Correction géométrique Apparence due à la perspective Forme normalisée (vue du dessus et de taille fixée) [x y 1].A = [x y 1] A matrice 3x3 Point de repère")
21
Paramètres du doigt Axe principal dinertie Mesures de largeur Mesure de longueur Difficulté: le doigt na pas une forme géométrique simple

22
Comparaison (matching)
")
25
Limitations de la géométrie de la main Manque dunicité pour de grandes bases Évolution, surtout chez les sujets jeunes ou vieux Problèmes avec les bijoux ou certaines pathologies (arthrose) Implique un capteur encombrant (inutilisable sur les portables)
 Implique un capteur encombrant (inutilisable sur les portables)")
26
Forme 3d de la main

27
k normal curvature - curvature of normal section at p Principal Curvatures: k max, k min - normal curvatures with maximal-minimal values Principal Directions: λ max, λ min - tangent vectors associated with principal curvatures. k max k min λ max λ min p (a surface curve)
.")
28
Index de forme Rut=ornière Cap=chapeau Trough=cuvette Saddle=selle Ridge=crête

29
Création de lindex Rut=ornière Cap=chapeau Trough=cuvette Saddle=selle Ridge=crête

30
Matching de 2 index de formes Probe=test; Gallery=données dapprentissage Corrélation Hamming

31
Comparaison le même jour

32
Comparaison à une semaine

33
Conclusions sur la forme 3d Le coefficient de corrélation est le critère le plus performant Lintervalle entre tests a un impact fort Cet impact peut être réduit en multipliant les templates

34
Veines La forme des veines au dos de la main est très bien adaptée à la verification. Chaque main a un unique pattern qui nest pas affecté par le temps ou le travail. On utilise une source IR.

35
Suite Système Fujitsu

36
Conclusion biométrie main Une techno bien acceptée (éthiquement et individuellement) et déjà bien déployée Niveau de performance moyen mais suffisant en vérification sur une base moyenne Bonne stabilité Extensions : veines, texture, lignes Mise en œuvre simple mais encombrante
 et déjà bien déployée Niveau de performance moyen mais suffisant en vérification sur une base moyenne Bonne stabilité Extensions : veines, texture, lignes Mise en œuvre simple mais encombrante")
Présentations similaires

 < signal cible …Pourquoi.>")





>")












