Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Bonjour, je vais passer un petit moment avec vous !

2
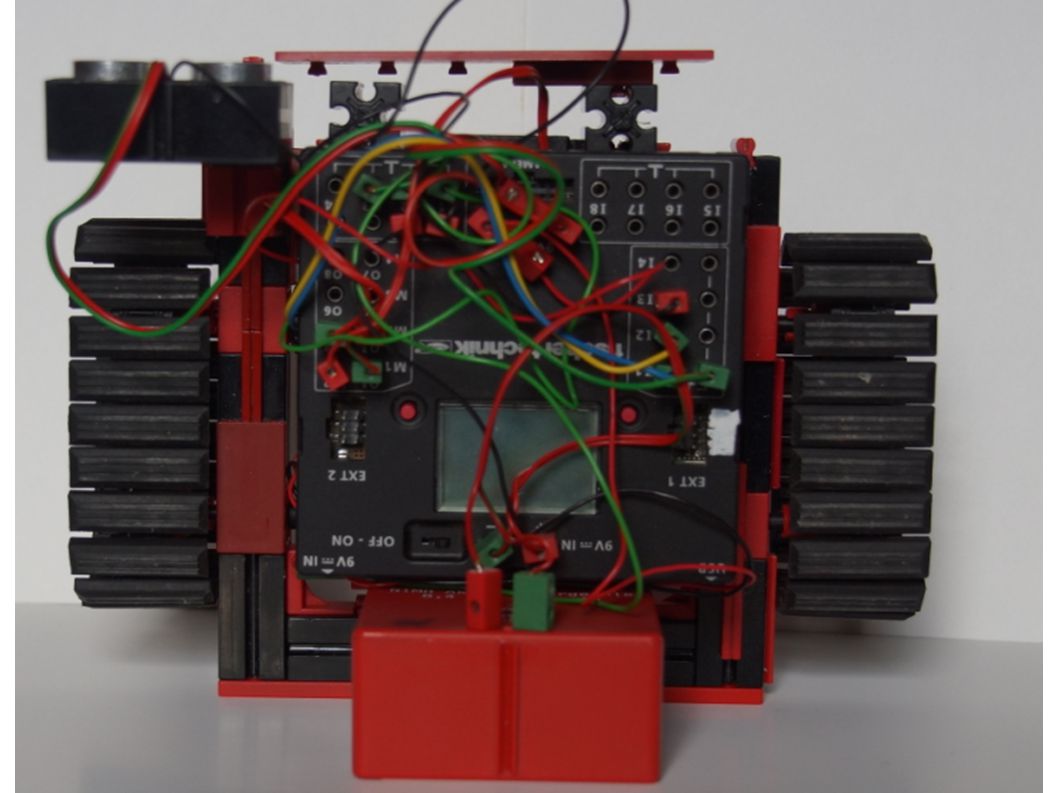
Familiarisation avec Nestor

3
Etre le plus rapide ? Avoir un robot véloce Affiner sa stratégie de course Avoir un programme performant

4
Avoir le robot le plus véloce

6
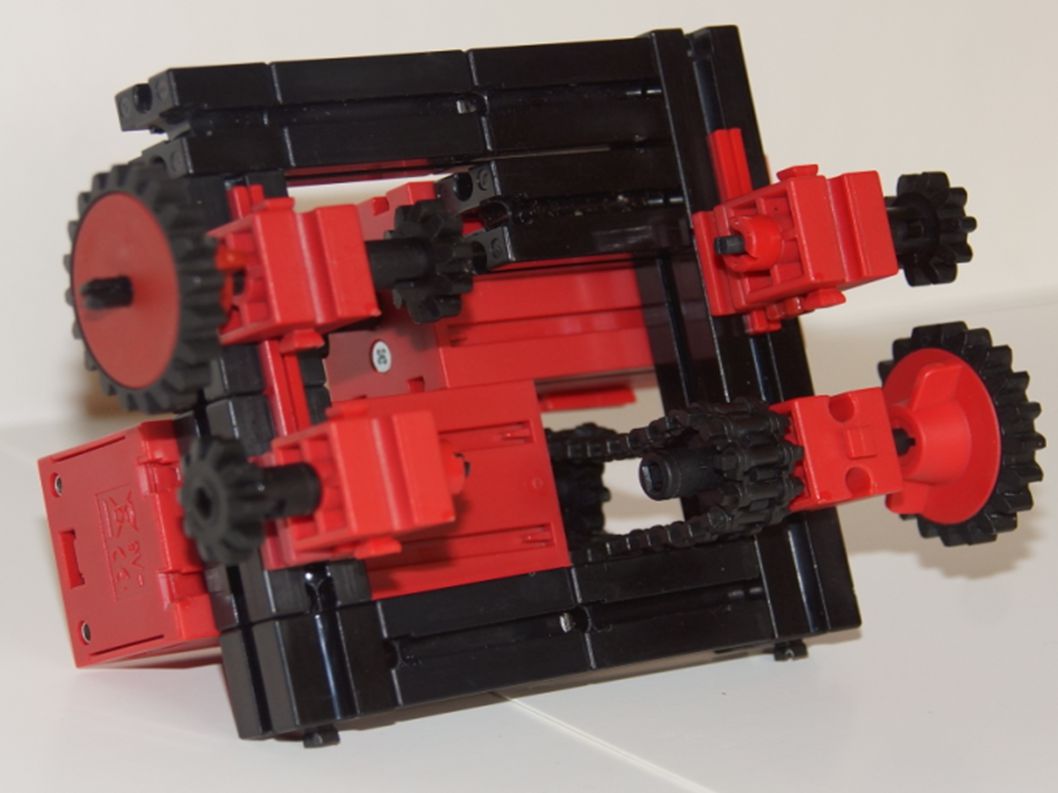
Le robot doit être le plus léger possible

7
La masse de le chaîne cinématique doit être aussi réduite que possible (la « nervosité » dépend l'inertie des masses en mouvement) Chenilles avec un patin sur 2 !
 Chenilles avec un patin sur 2 !")
8
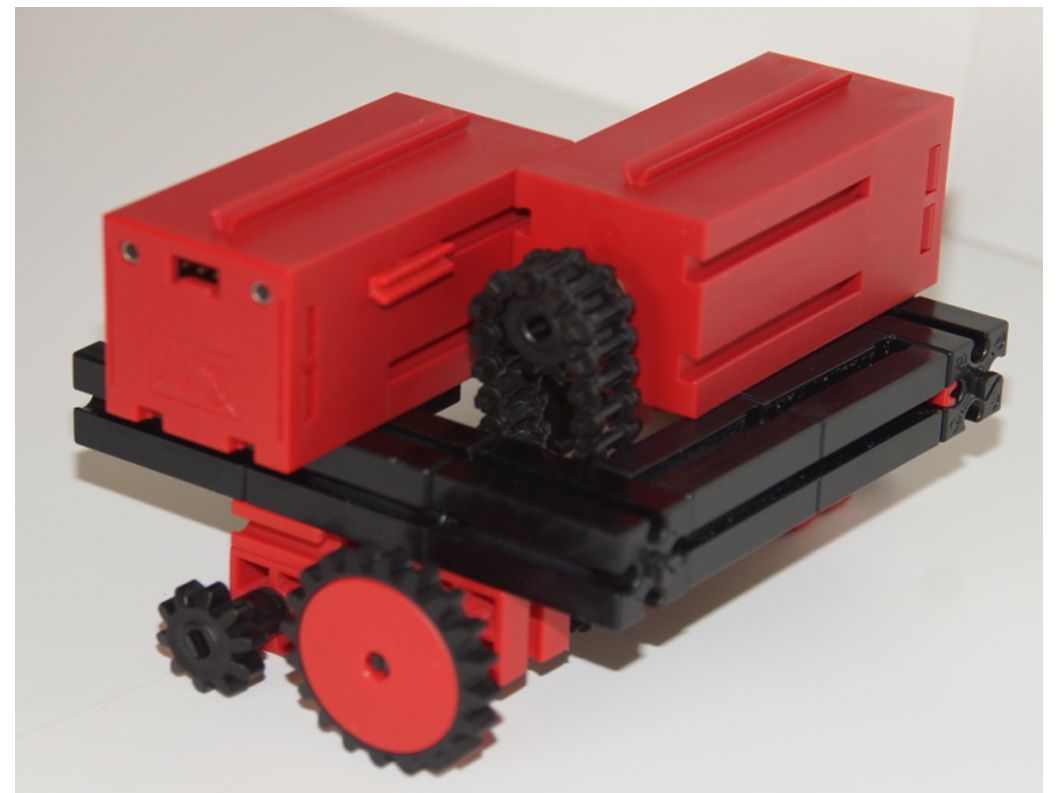
Une grande roue motrice et une petite roue de guidage !

9
Et voilà le travail !!

10
Moteur en prise directe

11
Le robot doit être compact : aussi étroit que possible (gain de temps dans les courbes)
")
14
Affiner sa stratégie de course Faire 3 programmes 1. un programme « pépère » pour assurer un temps et diminuer le stress d'un parcours sans chrono. 2. un programme plus ambitieux où l'on prend des risques. 3. un programme vraiment limite qui ne marche pas à tous les coups mais vous avez 2 fois 10 min pour qu'il réussisse 1 seule fois.

15
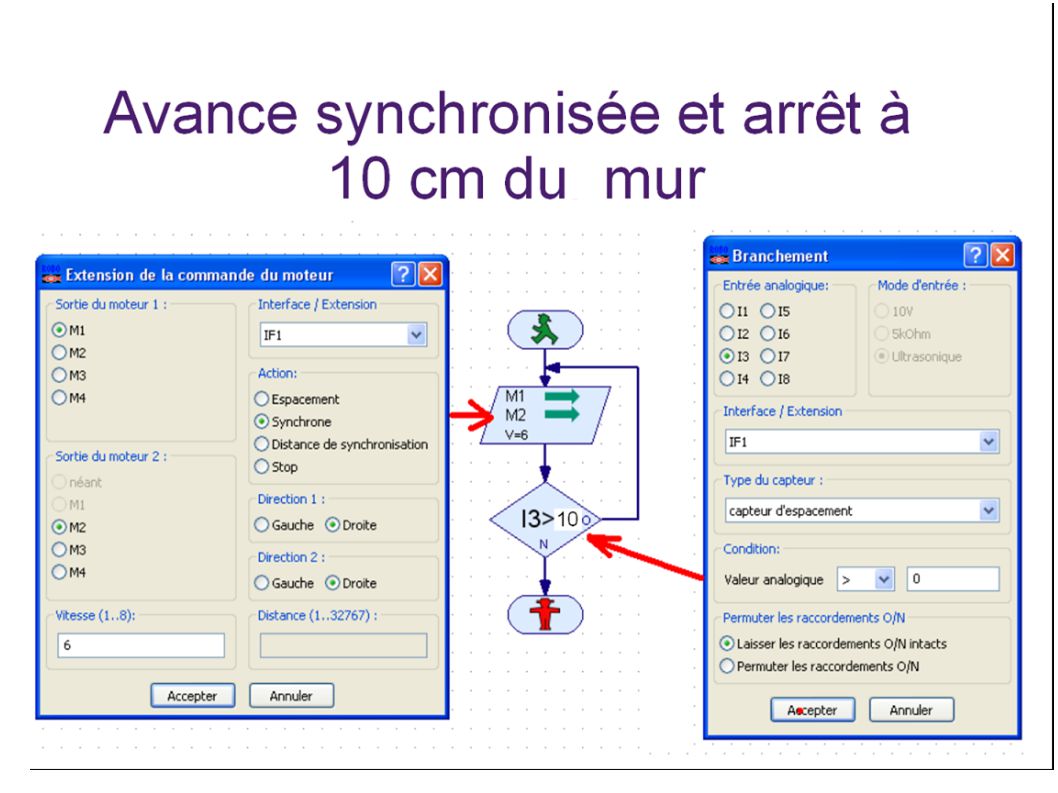
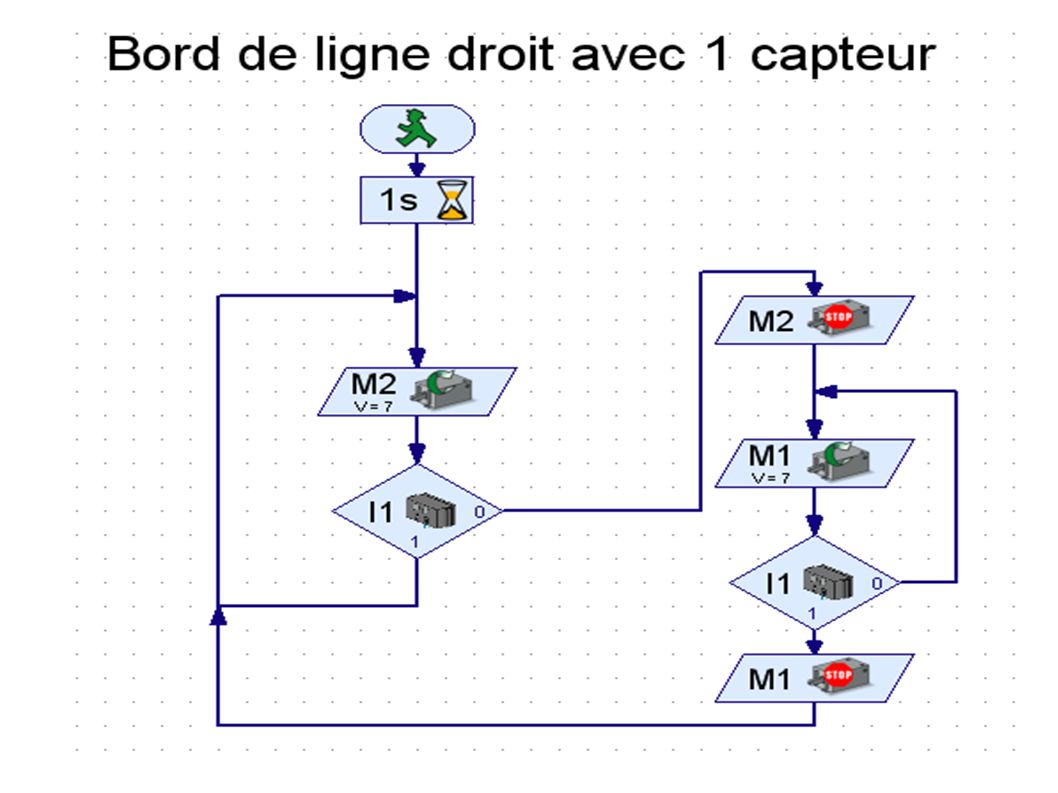
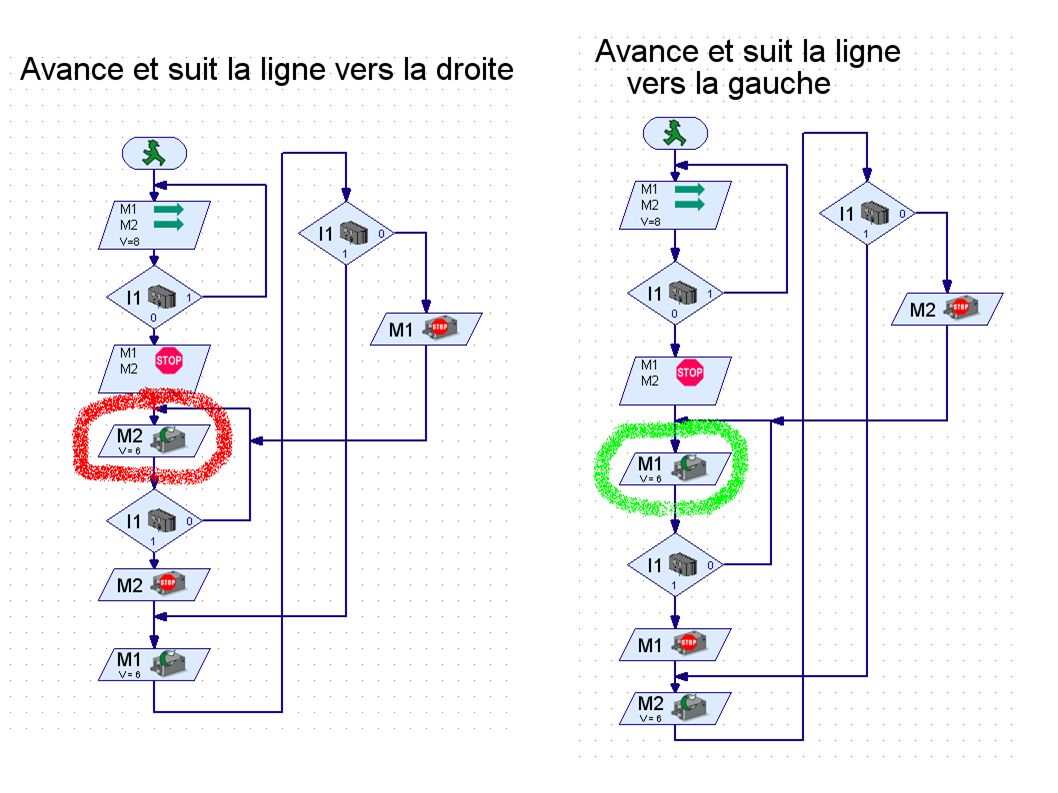
Quelques exemples de programmation

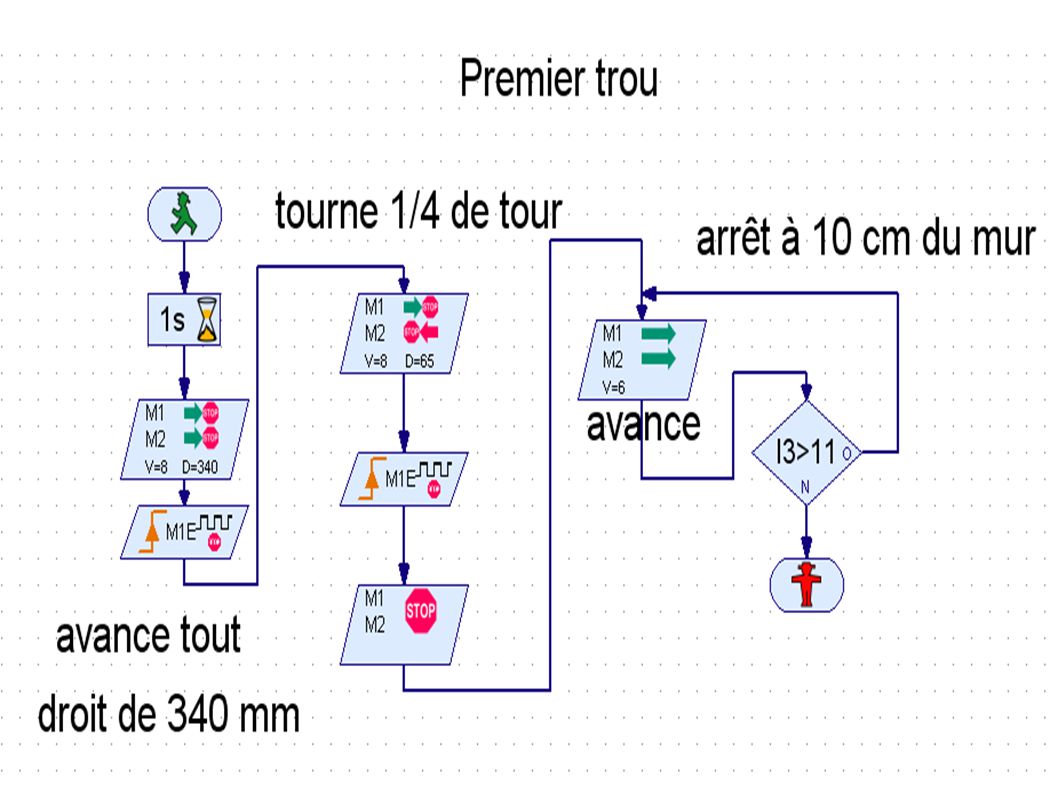
16
Avance de 340 mm

17
Tourne d'un quart de tour

21
Attention si un événement doit intervenir il faut l'envisager dans chaque boucle !

23
Utiliser des sous programmes pour simplifier la programmation d'actions répétitives

24
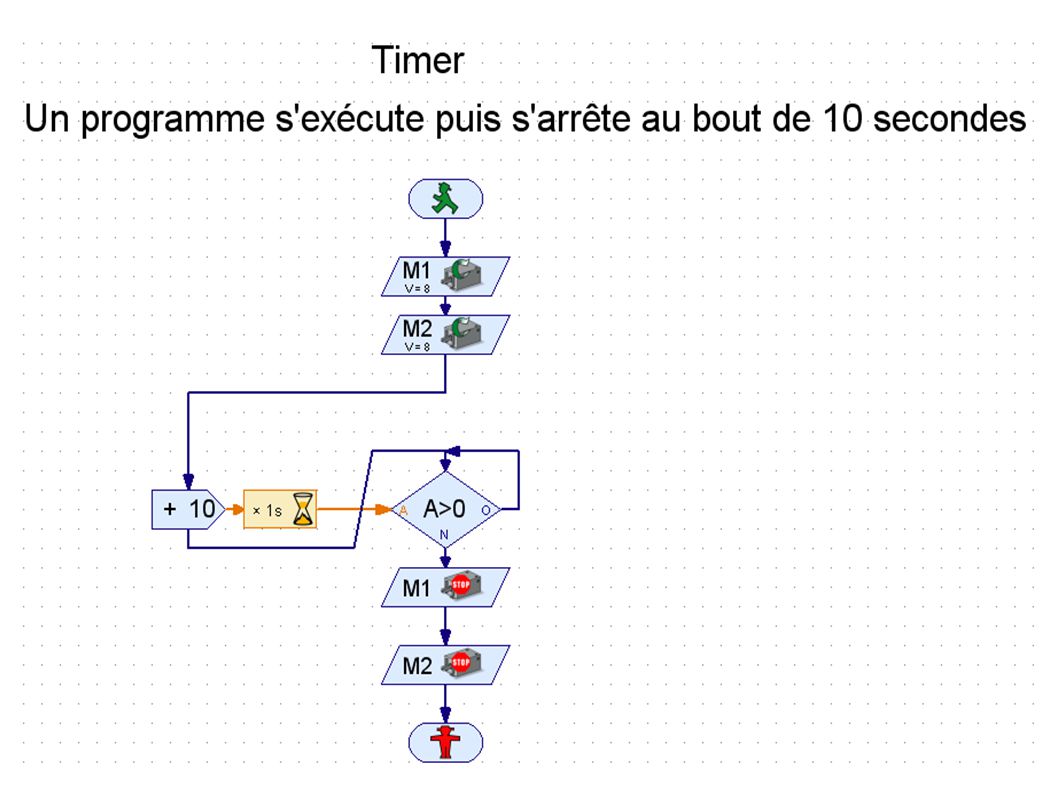
Compteur

26
En cas de problème, l'aide de Robo Pro est très bien faite

27
A bientôt sur le podium !!!!

Présentations similaires
 Trajectoire d’un mobile>")






>")

 Semaine 5 (du 30 Janvier au 03 Février 2006) Phase dappropriation ETAPE 3 (durée 3h) Semaine 5 (du 30 Janvier.>")









