Télécharger la présentation
La présentation est en train de télécharger. S'il vous plaît, attendez

1
Alimenter Superviser et générer des commandes vers le moteur Dessin attelle Diagramme Sagittal Etablir les marches de commande et d’arrêt Niveau A0 Commande Moteur Schéma Fonctionnel Régler et acquérir les paramètres de fonctionnement Câblage de l’ensemble Résultats de mesures Acquérir les informations représentatives de l’effort et de la vitesse Carte Micro Carte Interface Capter la position angulaire Elaborer des informations lumineuses marche, défaut Communiquer avec le réseau Ethernet Visualiser des paramètres de fonctionnement

3
Attelle de rééducation Prima +
Protocole de soins Energie électrique Patient Praticien Normes Mobilier Milieu ambiant

4
Partie Opérative KINETEC PRIMA + A 2 A1 Partie Commande Programme A 0
PROVOQUER LA FLEXION ET L’EXTENSION DE LA JAMBE A 2 GERER LE FONCTIONNEMENT DE L’ATTELLE A1 Partie Commande Présence d’Energie Electrique Réglages Programme Commandes de movement (VA-VB) A 0 Genou (ou hanche) à mobiliser (ou hanche) en mouvement Consignes du praticien (ou du patient ) Informations d’état Effort exercé (Imot) Position angulaire (Vpot) Vitesse d’exécution
 A 0. Genou. (ou. hanche) à mobiliser. (ou hanche) en mouvement. Consignes du praticien. (ou du patient. ) Informations. d’état. Effort exercé (Imot) Position angulaire (Vpot) Vitesse d’exécution.")
5
X4

7
Partie commande MENU Superviser et
Genou en mouvement en rééducation Partie commande Action manuelle du patient VCONS VREG Position angulaire VPOT VPOT-MAX VIMOT Genou à rééduquer ouverts ou fermés A0, A1, A2 GO START /STOP VMOTA VMOTB Alimenter Régler et acquérir les paramètres de fonctionnement Etablir les commandes marche arrêt inversion Superviser et générer des commandes vers le moteur Communiquer avec le réseau Ethernet Capter la position angulaire Acquérir les informations représentatives de l’effort et de la vitesse Mobiliser le genou Elaborer des informations lumineuses marche, défaut D0, D1, D2 DSLD5 Signal lumineux clignotant ou non Actions manuelles du kiné Indication position angulaire TXD RXD Web VA VB I MOT ILOAD 230Veff Actions manuelles du technicien 2 FA FP4 FP1 FP7 FP2 FP3 FP5 VOLTAGE VCC V+ V- VBAT FP6 3 Action manuelle du technicien Visualiser des paramètres de fonctionnement 4 SDA, SCL VCC, GND FP8 Infos visuelles TX+, TX- RX+, RX- MENU

8
Carte Micro

9
Carte Interface

10
Communiquer avec le réseau Ethernet

11
Commande Moteur

12
Alimenter

13
de l’effort et de la vitesse
Acquérir les informations représentatives de l’effort et de la vitesse

14
Capter la position angulaire

15
Elaborer des informations lumineuses
marche, défaut

16
Etablir les marches de commande et d’arrêt

17
Régler et acquérir les paramètres de
fonctionnement

18
générer des commandes vers le moteur
Superviser et générer des commandes vers le moteur

19
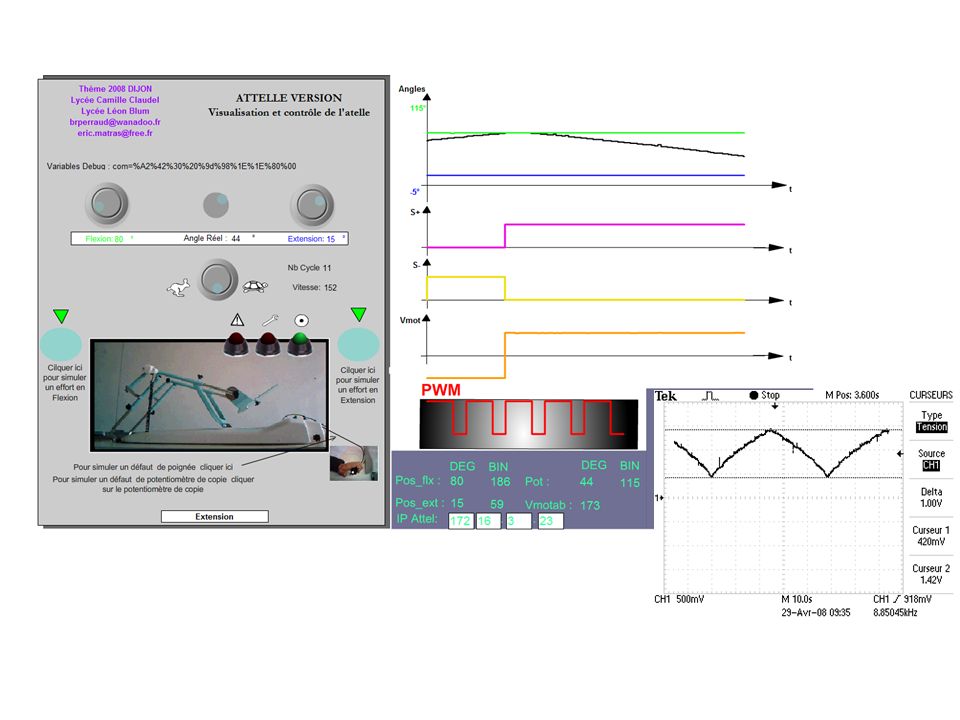
Visualiser des paramètres de fonctionnement

Présentations similaires





 Spécification des.>")













